Результат интеллектуальной деятельности: СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике, а именно к ракетам космического назначения (РКН).
Известен способ контроля траектории полета РКН на участке выведения полезной нагрузки на орбиту и спуска орбитального корабля (ОК) в атмосфере Земли, основанный на диагностике наиболее важных бортовых систем: двигательной установки, системы управления и др. РКН и ОК [1] (стр.206, 207).
Недостаток способа в том, что на основе этой информации нельзя принимать решение об аварийном прекращении полета РКН, так как отклонение ракеты и ОК от расчетной траектории может быть связано с неучтенными возмущающими факторами, ошибками в реализации бортовых алгоритмов управления и другими причинами, то есть не связано с работой бортовых систем и аппаратуры.
Известен способ контроля траектории полета РКН из наземного центра управления полетами (ЦУП) ([1] (стр.412, 413) на основе информации по телеметрическим каналам с борта РКН и ОК, внешнетраекторным измерениям на основе радиолокаторов с Земли, которая обрабатывается в реальном масштабе времени и отображается на экраны операторов ЦУП для передачи команд по командной радиолинии на борт РКН и ОК.
Для контроля и распознавания аварийных ситуаций вводятся параметры аварийности РКН, формируемые бортовой автоматической системой управления (БАСУ) в полете (например, потеря управляемости из-за отказа рулевых приводов (потеря угловой ориентации - угловых отклонений по тангажу, рысканию и крену (Δϑ, Δψ, Δγ)), из-за действия нерасчетных возмущений, или отказ двигателей (потеря тяги) и т.п.) ([1], стр.84, 85). В этом случае двигатели РКН выключаются.
Недостатком такого способа контроля траектории являются большая стоимость, что не позволяет использовать его для РКН.
Известен способ контроля и аварийного прерывания полета ракеты с использованием наземной службы обеспечения безопасности (СОБ) [2], основанный на анализе телеметрической информации о параметрах движения с борта РКН, оптических и внешнетраекторных измерениях с Земли и от наземной вычислительной машины в СОБ, прогнозирующей в реальном масштабе времени мгновенную точку падения ракеты. В случае достижения контролируемыми параметрами ракеты аварийных значений (опасном отклонении ракеты от курса) или при возникновении на ракете аварийной ситуации производят аварийное выключение двигателей ракеты или аварийный подрыв ракеты.
Недостатками такого способа контроля траектории полета являются: слабая помехозащищенность командной радиолинии от несанкционированных команд со стороны и значительная стоимость радиолокаторов и наземной инфраструктуры.
Известен бортовой способ контроля полета ракеты для ликвидации заряда головной части в воздухе в случае аварийного полета ракеты [3]. Система АПР ракеты выдает команду на ее подрыв в случаях:
- потери ракетой устойчивости при отклонении от заданной гироприборами траектории по углам тангажа, рыскания и вращения на угол более ±10 гр.
- преждевременном (или послевременном) прохождении команды на выключение двигателя, приводящем к падению ракеты на дальность, меньше (или больше) допустимой.
Известен бортовой способ управления и контроля полета ракеты, [4], состоящий в том, что в бортовой вычислительный комплекс системы управления ракетой заранее вводят значения функционалов скорости или временных критических точек на траектории полета ракеты, при аварии в которых системой управления блокируют исполнение аварийной циклограммы на время, необходимое для увода предполагаемой точки падения ракеты за опасную зону, после чего с помощью аварийной циклограммы производят аварийное выключение двигателей (АВД) или аварийный подрыв ракеты. Этот способ предполагает управление положением центра масс РКН программным образом, то есть с использованием жесткой опорной траектории, что, в свою очередь, возможно при наличии системы регулирования кажущейся скорости (РКС)
- ее продольной составляющей (см. [6], стр.199-201). В настоящее время при наличии БЦВК в составе БАСУ используют терминальные алгоритмы наведения ракет с использованием гибких траекторий (см. [6], стр.201), что связано с желанием повышения полетной надежности при возникновении на борту нештатных ситуаций. БАСУ, использующая терминальное наведение центра масс РКН и принцип контроля траектории [4], может реализовать команду АВД, когда в этом нет необходимости.
Недостатком способа [4] являются:
- Ограниченное число параметров для контроля траектории, а именно:
- или по функционалу скорости, в качестве которого традиционно используют кажущуюся скорость в направлении продольной оси РКН ([6] стр.86, 212), соответствующую номинальной траектории (без учета влияния возмущающих факторов);
- или по временным критическим точкам на траектории полета ракеты, согласованным с номинальной траекторией (без учета влияния возмущающих факторов), не учитывающих возможное отклонение РКН по скорости и по времени от этой траектории.
- Опасность падения аварийной ракеты в запретную зону при действии нерасчетных боковых ветров или ошибок в алгоритмах управления. В этом случае значение продольной скорости ракеты может изменяться незначительно, а неконтролируемые отклонения координат, поперечных скоростей и времени полета могут быть значительными, что может привести к падению аварийной ракеты в запретную зону.
Общими недостатками способов контроля [3, 4] являются:
- Отсутствие возобновляемого прогноза мгновенной точки падения ракеты, что может приводить к падению аварийной РКН в запретные зоны.
- Отсутствие сравнения контролируемых параметров с их предельно допустимыми значениями, внутри которых полет ракеты при развитии аварийной ситуации невзрывного типа некоторое время возможен. В течение этого времени причина, вызывающая аварийную ситуацию, или нерасчетный возмущающий фактор могут исчезнуть, ослабнуть, может произойти разделение ступеней так, что полет РКН может быть продолжен.
Наиболее близким по технической сущности к предлагаемому изобретению является выбранный в качестве прототипа ([5], стр.30-32) способ бортового контроля для аварийного прекращения полета ракеты на участке выведения полезной нагрузки (ПН) на орбиту, заключающийся в контроле бортовой автоматической системой управления (БАСУ) траектории движения ракеты космического назначения и выработке аварийной команды на прекращение полета в случае возникновения каких-либо нештатных ситуаций.
Основой БАСУ ([5], стр.30-32) являются измерительный инерциальный комплекс (ИК) на базе трехосной гиростабилизированной (ТГС) платформы в кардановом подвесе и цифровой вычислительный комплекс (БЦВК) с программным математическим обеспечением. Инерциальный комплекс посредством измерителей ускорений (акселерометров) и датчиков углов (ϑ, ψ, γ) обеспечивает получение на борту информации о параметрах движения (угловых и линейных) в неподвижной системе координат - начальной стартовой системе координат (НССК). Траектория движения для целей управления РКН формируется БАСУ на основе измеряемых (вычисляемых) линейных и угловых параметров движения ([5], стр.30-32):
- компонент вектора кажущегося ускорения в начальной стартовой системе координат (НССК) 
 , пропорционального реактивной силе (силе тяги двигателя) и аэродинамической силе, (см. также [1], стр.272; [7], стр.47; [6], стр.85, 86), на основе которых вычисляется вектор кажущейся скорости
, пропорционального реактивной силе (силе тяги двигателя) и аэродинамической силе, (см. также [1], стр.272; [7], стр.47; [6], стр.85, 86), на основе которых вычисляется вектор кажущейся скорости 
 ;
;
- угловых отклонений ракеты (Δϑ, Δψ, Δγ) по тангажу, рысканию и крену, определяющих в БАСУ программно-связанную систему координат (см. также [1], стр.274 и [3]); являющихся разностью между углами (ϑ, ψ, γ) трехстепенной гироплатформы (ТГС) в связанной системе координат (СК), поддерживаемой на борту на основе НССК, и программными углами (ϑпр, ψпр, γпр), вычисляемым в БАСУ в полете по априорным программным зависимостям при наведении по жесткой траектории, или - на основе семейства гибких траекторий - при использовании терминального наведения (см. [6], стр.200, 201).
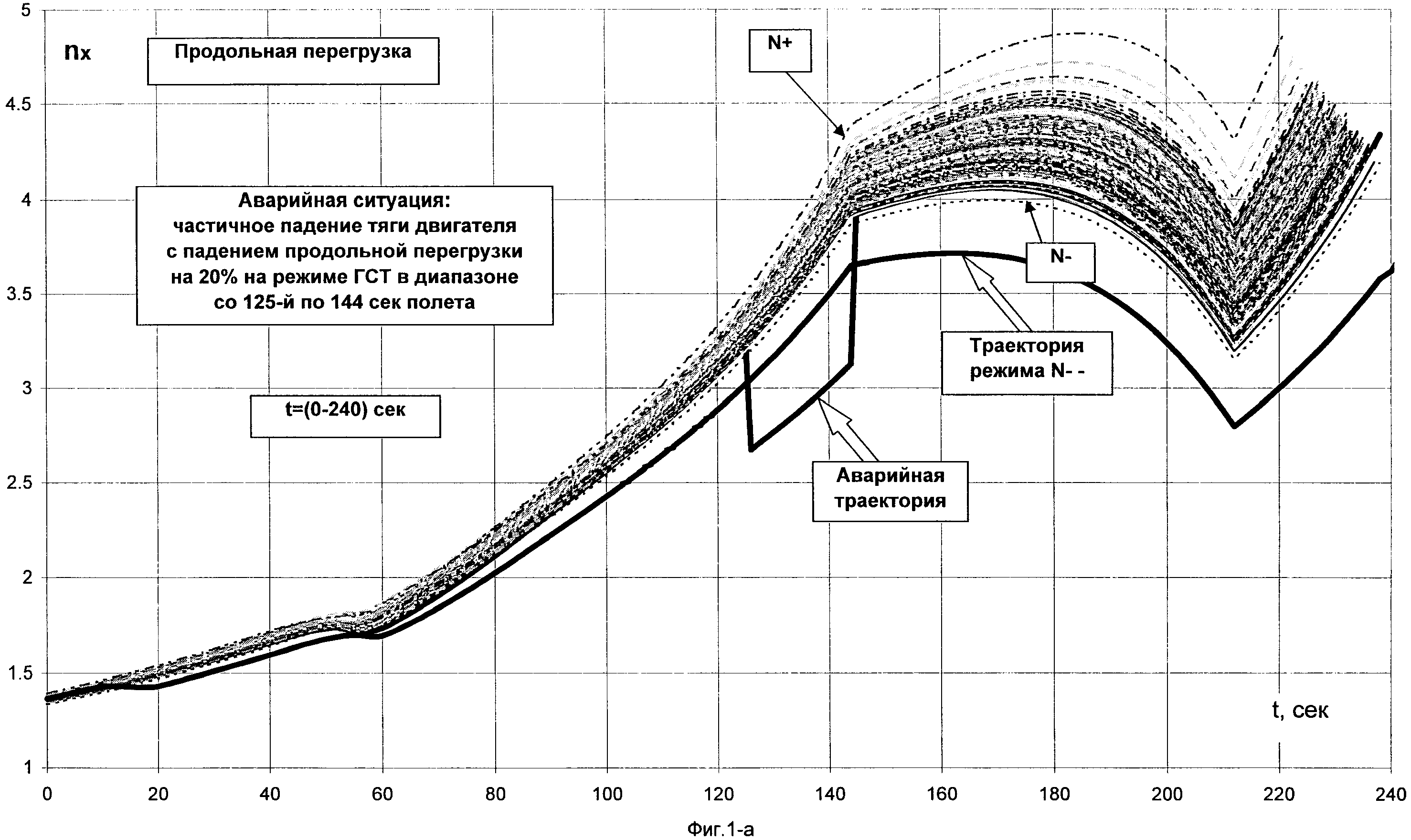
Тяга двигателей - реактивная сила - пропорциональна продольной перегрузке nx в связанной СК (см. также [11], стр.341, 342), вычисляемой в БАСУ по измеренным компонентам кажущегося ускорения, известным до полета компонентам ускорения свободного падения 
 и углам (ϑ, ψ, γ) между НССК и связанной СК (см. также [1], стр.286; [7], стр.47, 48).
и углам (ϑ, ψ, γ) между НССК и связанной СК (см. также [1], стр.286; [7], стр.47, 48).
Этот метод контроля траектории с использованием параметров аварийности ((Δϑ, Δψ, Δγ) и nx) достаточно прост для реализации в неподвижной системе координат - начальной стартовой системе координат (НССК). Траектория движения для целей управления РКН формируется БАСУ на основе измеряемых (вычисляемых) линейных и угловых параметров движения ([5], стр.30-32):
- компонент вектора кажущегося ускорения в начальной стартовой системе координат (НССК)  , пропорционального реактивной силе (силе тяги двигателя) и аэродинамической силе (см. также [1], стр.272; [7], стр.47; [6], стр.85,86), на основе которых вычисляется вектор кажущейся скорости
, пропорционального реактивной силе (силе тяги двигателя) и аэродинамической силе (см. также [1], стр.272; [7], стр.47; [6], стр.85,86), на основе которых вычисляется вектор кажущейся скорости 
 ;
;
- угловых отклонений ракеты (Δϑ, Δψ, Δγ) по тангажу, рысканию и крену, определяющих в БАСУ программно-связанную систему координат (см. также [1], стр.274; и [3]); являющихся разностью между углами (ϑ, ψ, γ) трехстепенной гироплатформы (ТГС) в связанной системе координат (СК), поддерживаемой на борту на основе НССК, и программными углами (ϑпр, ψпр, γпр), вычисляемыми в БАСУ в полете по априорным программным зависимостям при наведении по жесткой траектории, или на основе семейства гибких траекторий - при использовании терминального наведения (см. [6], стр.200, 201).
Тяга двигателей - реактивная сила - пропорциональна продольной перегрузке nx в связанной СК (см. также [11], стр.341, 342), вычисляемой в БАСУ по измеренным компонентам кажущегося ускорения, известным до полета компонентам ускорения свободного падения  и углам (ϑ, ψ, γ) между НССК и связанной СК (см. также [1], стр.286; [7], стр.47, 48).
и углам (ϑ, ψ, γ) между НССК и связанной СК (см. также [1], стр.286; [7], стр.47, 48).
Этот метод контроля траектории с использованием параметров аварийности ((Δϑ, Δψ, Δγ) и nx) достаточно прост для реализации и помимо РКН ([5], стр.30-32; [1], стр.85, 272, 286; [7], стр.47; [11], стр.341, 342) используется для зенитных ракет [3].
Недостатками этого бортового способа контроля траектории полета по тяге двигателей - продольной перегрузке nx - и угловым рассогласованиям (Δϑ, Δψ, Δγ), используемым в качестве параметров аварийности с аварийным выключением двигателя, являются:
1) Быстрое изменение указанных параметров контроля траектории - параметров аварийности - и отсутствие их сравнения с предельно-допустимыми значениями при развитии аварийных ситуаций типа частичной потери тяги двигателя, «залипания» золотника рулевого привода, действия нерасчетных возмущающих факторов, ошибок в алгоритмах наведения и навигации и др. В процессе выхода контролируемых параметров ((Δϑ, Δψ, Δγ) и nx) на предельно-допустимые значения, причина, вызывающая аварийную ситуацию, может исчезнуть, ослабнуть, может наступить разделение ступеней, возмущающий фактор может действовать в противовес аварийной ситуации и др. В этом случае реализация аварийного выключения двигателя (АВД) не произойдет, РКН будет сохранена, а полет продолжен. В качестве примера можно привести случай с РКН серии «Tauras» (см. [10] стр.26, разд. «Ракета-носитель»), когда «из-за «залипания» рулевого привода после включения РДТТ второй ступени РКН на какое-то время потеряла управление. После освобождения привода система управления попыталась восстановить контроль: ракета сделала в воздухе «кульбит» и вернулась на прежний курс». В данном случае целевая задача выведения двух спутников на рабочую орбиту была не выполнена, и оба они вернулись в атмосферу. Но если бы разворот был не на 360 гр, или указанная ситуация произошла позднее, то результат мог быть другим.
2) Невозможность идентификации на борту ситуации невыхода одного из двигателей РКН, имеющей несколько двигателей, на режим главной ступени тяги (ГСТ), когда он остается на предварительной ступени тяги (ПСТ). Это проявляется в невозможности выявления на борту на стартовом участке полета небольшой величины падения продольной перегрузки nx, соизмеримой с точностью измерений, которая в течение длительного времени полета незначительно отличается от номинального значения. В этом случае способ [5] не работает, что в сочетании с отсутствием возобновляемого прогноза мгновенной точки падения может привести к увеличению экологического ущерба при падении аварийной РКН в нерасчетное поле падения после слишком поздней фиксации системой управления факта снижения продольной перегрузки ниже допустимого значения.
Задачей предлагаемого изобретения является разработка бортового способа контроля для аварийного прекращения полета ракеты на участке выведения полезной нагрузки на орбиту, обеспечивающего повышение живучести РКН (полетной надежности) и улучшение экологической безопасности по трассе полета. При этом задача обеспечения экологической безопасности решается БАСУ после того, как все возможности сохранения РКН в аварийной ситуации (борьба за живучесть) в рамках предлагаемого способа исчерпаны.
Техническими результатами изобретения являются:
- Повышение живучести - полетной надежности - РКН за счет уменьшения случаев необоснованного аварийного прекращения полета с аварийным выключением двигателя (АВД). Это достигается на основе использования в БАСУ для контроля траектории полета - трех компонент земной скорости (VХНССК, VУНССК, VZНССК) и трех координат (VНССК, YНССК, ZНССК) в начальной стартовой системе координат (НССК), вычисляемых БАСУ по компонентам кажущегося ускорения , ускорения свободного падения и компонентам кажущейся скорости (см. также [1], стр.272; [7], стр.47), а также за счет проверки в БАСУ принадлежности этих шести параметров их граничным значениям (±), которые вычисляются по их программным зависимостям, задаваемым в БЦВК перед стартом РКН в виде функций времени.
- Улучшение экологической безопасности по трассе полета РКН за счет периодически возобновляемого в БАСУ в процессе полета аварийной РКН вычисления (прогноза) координат мгновенной точки падения РКН на земную поверхность, когда все четыре контролируемых параметра в продольном (VХНССК, VУНССК, XНССК, YНССК), или два параметра в боковом (VZНССК, ZНССК) движении выходят в процессе полета за граничные (VХНССК, VУНССК, XНССК, YНССК)± и (VZНССК, ZНССК)± значения, с одновременным сравнением этих координат с допустимыми априорными значениями одной из ближайших безопасных зон для обеспечения падения аварийной РКН в эту зону после выключения двигателей. При этом уменьшается вероятность падения аварийной РКН в запретные зоны и может быть обеспечено падение аварийной РКН, имеющей несколько двигателей, в зоне космодрома в случае возникновении на стартовом участке аварийной ситуации невыхода тяги одного из двигателей на режим ГСТ.
Указанные технические результаты достигаются тем, что в способе бортового контроля для аварийного прекращения полета ракеты космического назначения (РКН) на участке выведения полезной нагрузки (ПН) на орбиту ([5], стр.30-32), заключающемся в контроле бортовой автоматической системой управления траектории движения и выработке аварийной команды на прекращение полета в случае возникновения каких-либо нештатных ситуаций, в соответствии с изобретением периодически по времени полета вычисляют:
- три компоненты вектора земной скорости (VХНССК, VУНССК, VZНССК) и три координаты (ХНССК, YНССК, ZНССК) в начальной стартовой системе координат,
- граничные (±) параметры по компонентам (VХНССК, VУНССК, XНССК, YНССК)± продольного движения и по компонентам (VZНССК, ZНССК)± бокового движения, которые задаются в бортовом цифровом вычислительном комплексе перед полетом как функции времени,
- условия принадлежности каждой из четырех компонент продольного движения (VХНССК, VУНССК, XНССК, YНССК) и обеих компонент VZНССК, ZНССК) бокового движения допустимым множествам, образованным соответствующими граничными зависимостями (VХНССК, VУНССК, XНССК, YНССК)± и (VZНССК, ZНССК)±,
и, если нарушены условия принадлежности контролируемых параметров допустимым множествам по всем четырем компонентам продольного движения (VХНССК, VУНССК, XНССК, YНССК), или по двум компонентам (VZНССК, ZНССК) бокового движения, вычисляют географические координаты мгновенной точки падения ракеты на Землю, с аварийным выключением двигателей ракеты при условии, что координаты расчетной мгновенной точки падения находятся в одной из безопасных зон, положение и размеры которых вносятся в бортовую автоматическую систему управления до полета для сравнения текущих координат мгновенной точки падения с допустимыми значениями ближайшей безопасной зоны.
Положительный эффект изобретения достигается за счет контроля параметров траекторного движения РКН по четырем компонентам (VХНССК, VУНССК, XНССК, YНССК) продольного движения и по двум компонентам (VZНССК, ZНССК) бокового движения. Эти параметры изменяются медленнее, нежели продольная перегрузка nx - аналог тяги двигателя - и угловые отклонения (Δϑ, Δψ, Δγ) ракеты в способе [5] (см. также [3]), а их контроль осуществляется в достаточно широких допустимых по верхним и нижним границам множествах - областях - с принятием решения о прекращении полета при выходе всех четырех параметров продольного движения, или двух параметров бокового движения, за соответствующие допустимые множества. Это в некоторых случаях позволяет БАСУ не прерывать полет РКН из-за аварийной ситуации, когда она носит невзрывной характер, если контролируемые текущие параметры (хотя бы один из четырех) в продольном движении или (один из двух) боковом движении не выходят из допустимых областей за свои граничные значения, а накопленные отклонения по указанным параметрам могут быть компенсированы БАСУ на участке полета РКН со ступенью, на которой наблюдаемая аварийная ситуация ослабляется за счет действия сопутствующих факторов или прекращается, или будут компенсированы на участках полета РКН с работой двигателей последующих ступеней.
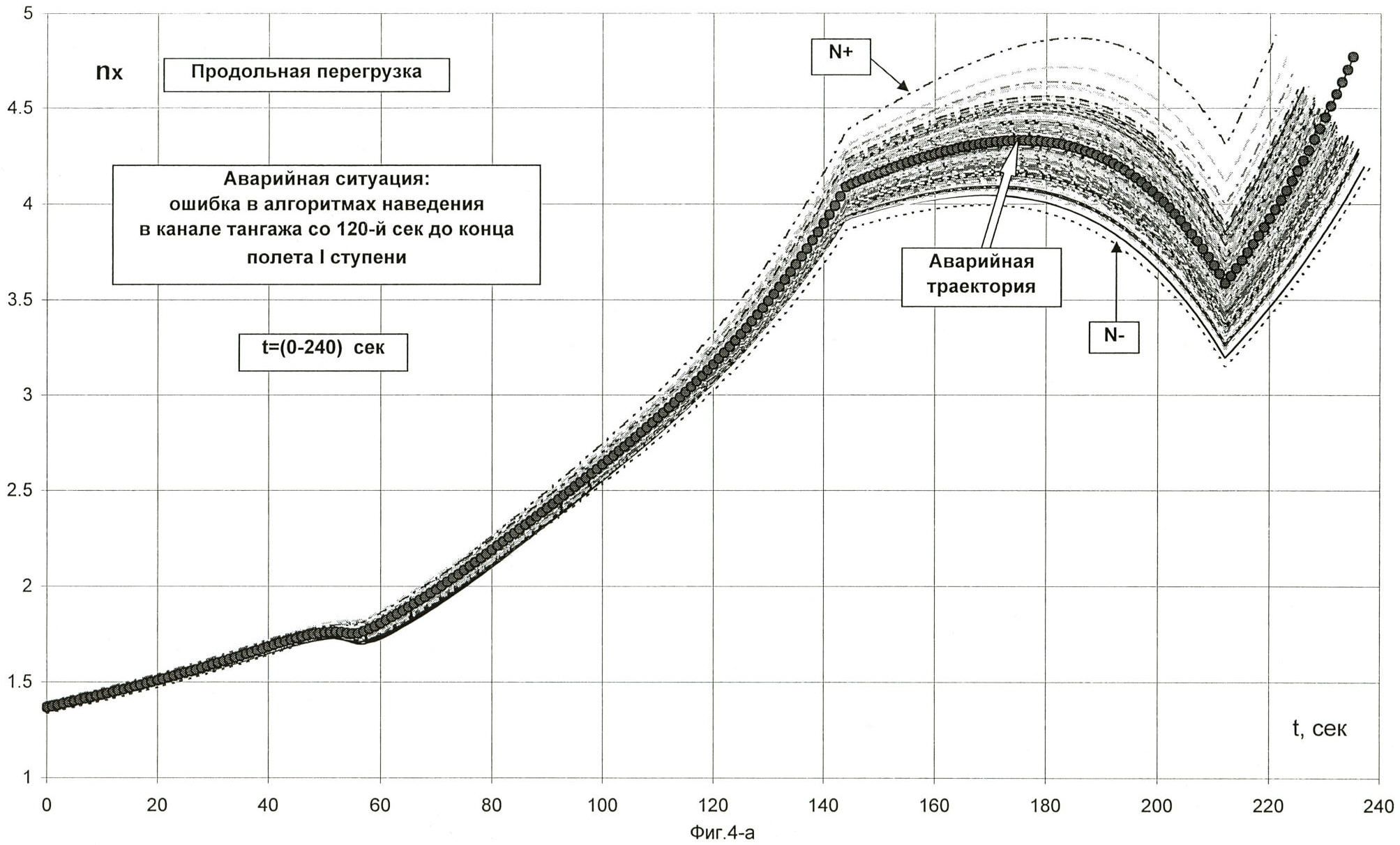
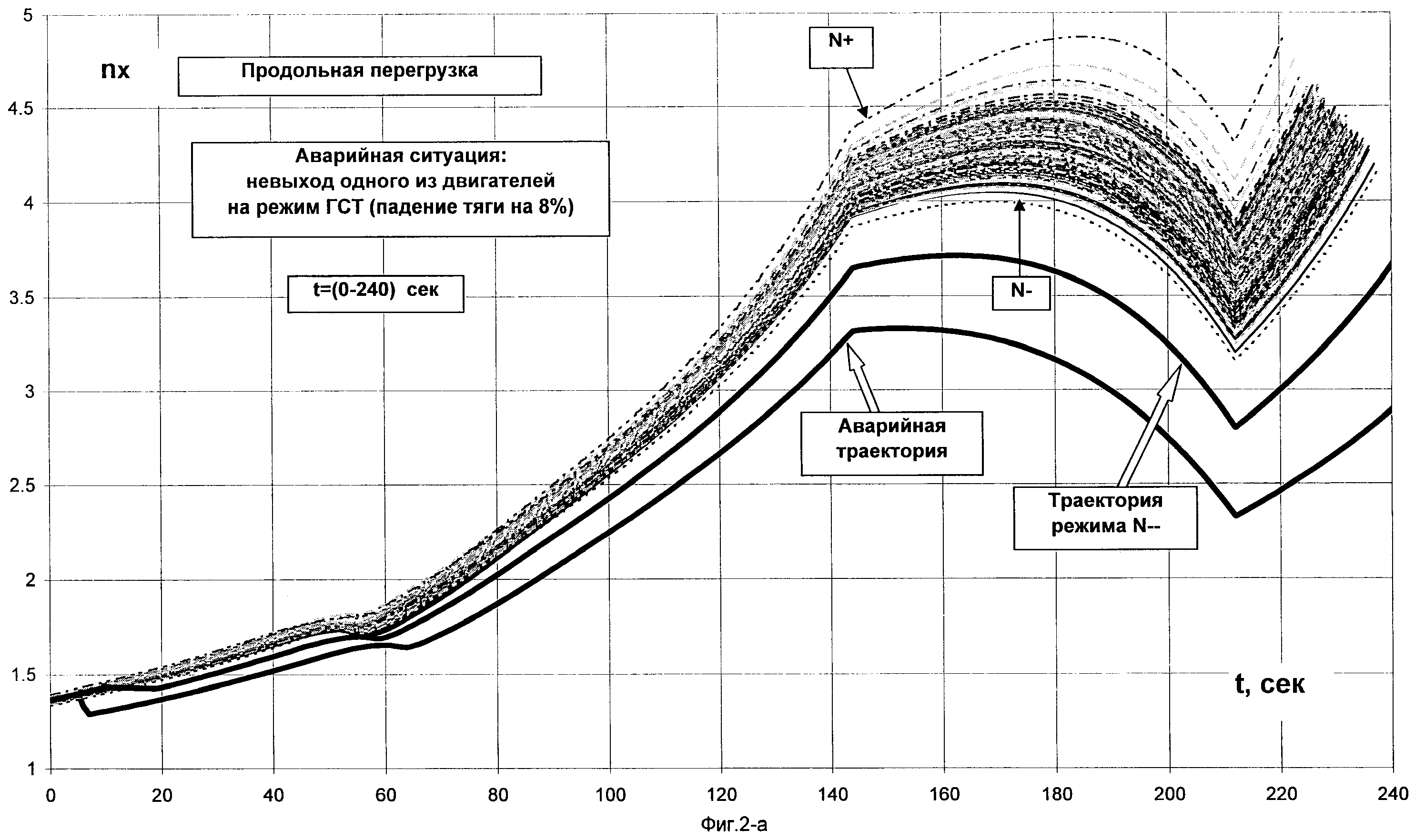
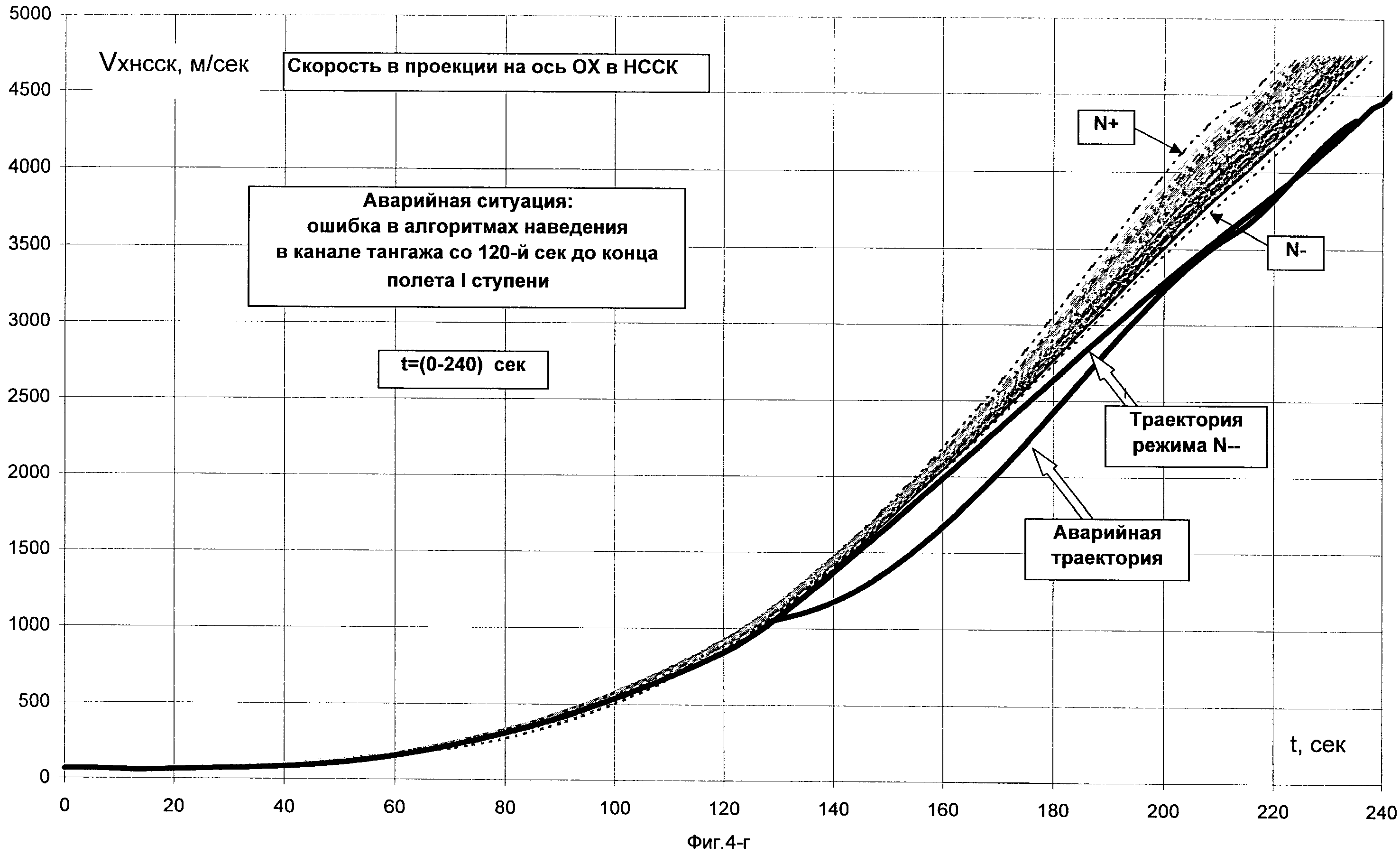
Сущность предлагаемого изобретения поясняется на фиг.1, 2, 3, 4, где представлены результаты математического моделирования движения гипотетической РКН как замкнутой динамической системы «модель движения РКН + алгоритмы управления» на участке работы двигателя 1-й ступени. Для расчетов использованы алгоритмы навигации, наведения и угловой стабилизации, принципы которых изложены в [6]-[9]. Для иллюстрации эффективности предлагаемого способа рассматриваются различные аварийные ситуации. На этих фигурах показаны контролируемые траекторные параметры в НССК (VХНССК, VУНССК, XНССК, YНССК) в продольном движении и (VZНССК, ZНССК) в боковом движении, а именно:
- Линейные скорости и координаты в НССК:
- VХНССК (фиг.1-в), которая по характеру близка к кажущейся скорости  , являющейся интегралом от продольной перегрузки [6] (стр.85, 86) с коэффициентом пропорциональности - ускорением свободного падения;
, являющейся интегралом от продольной перегрузки [6] (стр.85, 86) с коэффициентом пропорциональности - ускорением свободного падения;
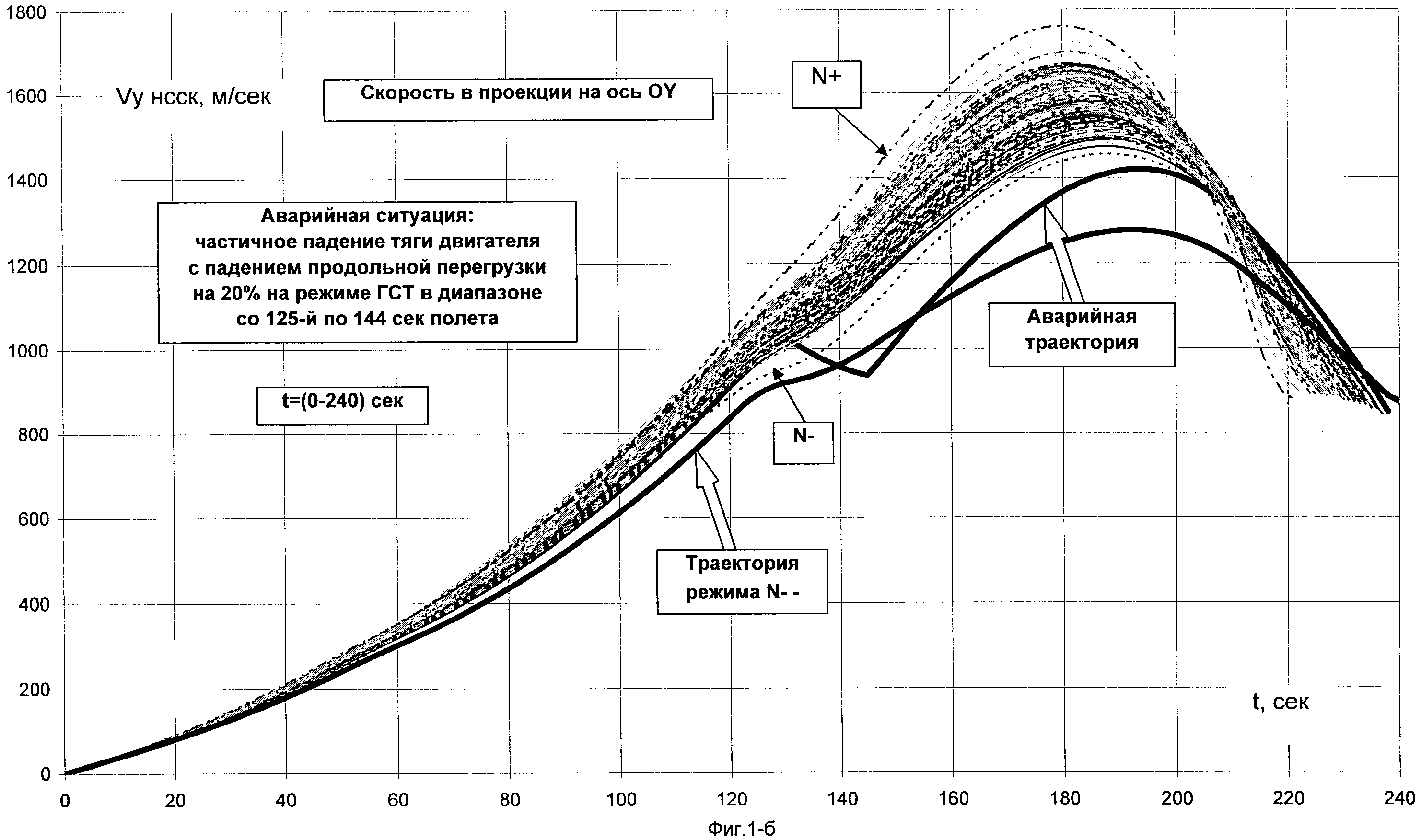
- VУНССК (фиг.1-б), VZНССК (фиг.3-в);
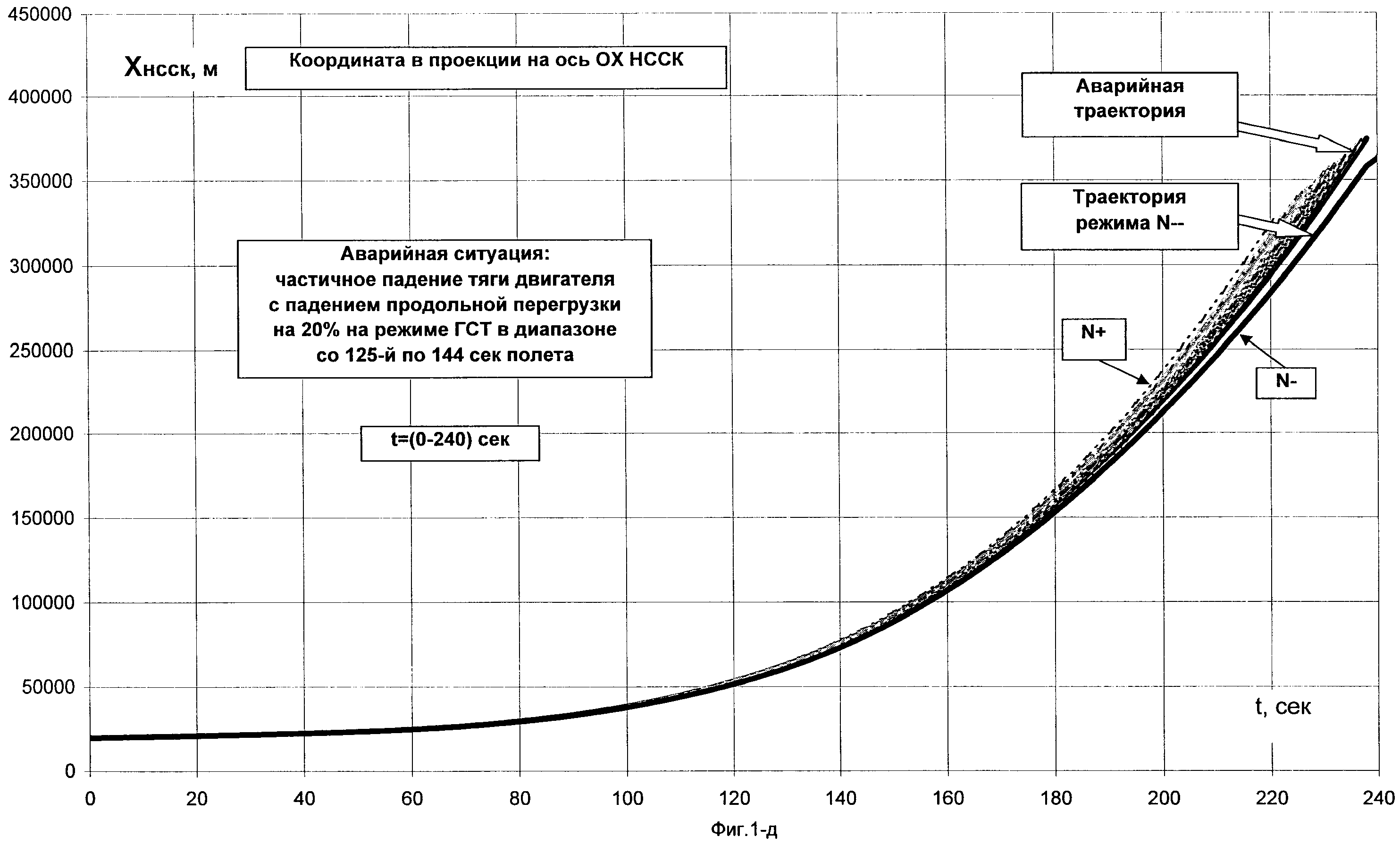
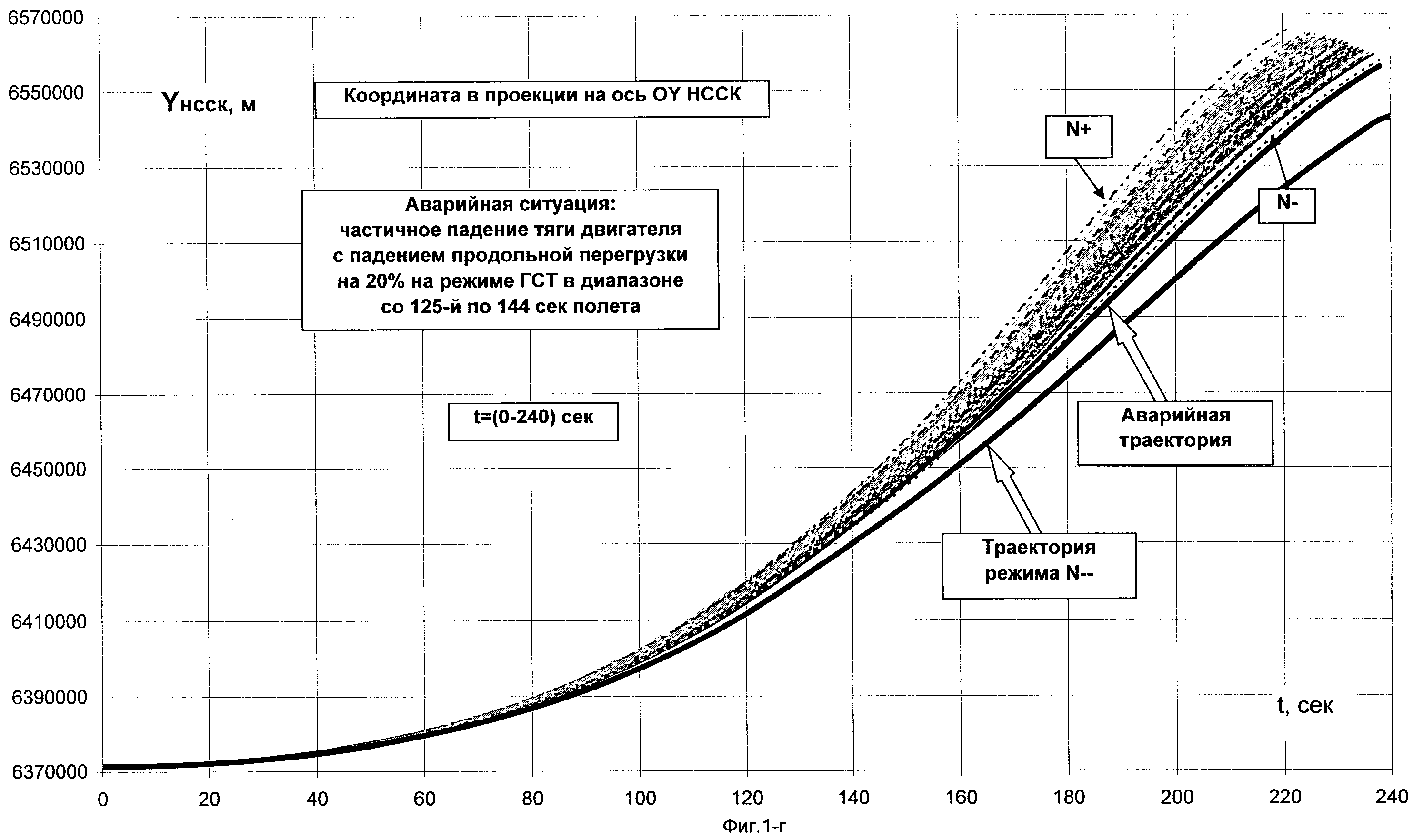
- ХНССК (фиг.1-д), YНССК (фиг.1-г), ZНССК (фиг.3-г).
- Семейства (пучки) траекторных параметров продольного (VХНССК, VУНССК, XНССК, YНССК) и бокового (VZНССК, ZНССК) движения на основе результатов статистического математического моделирования управляемого движения при учете полного состава расчетных возмущающих факторов. Среди них учтены - ветер, задаваемый вектором скорости и направлением, и разбросы на физические параметры РКН - аэродинамические характеристики, инерционно-массовые и центровочные характеристики, параметры двигательных установок и др.
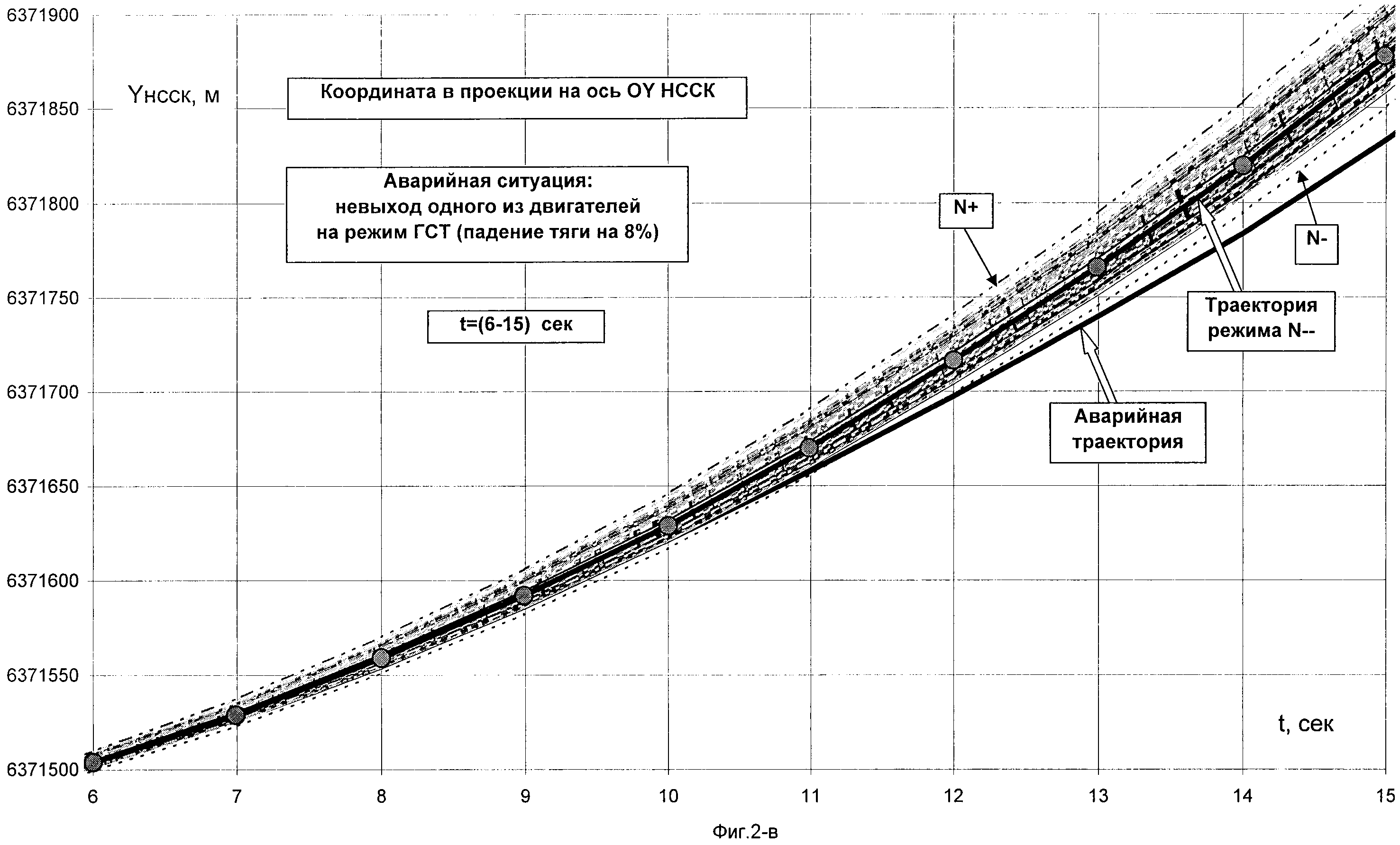
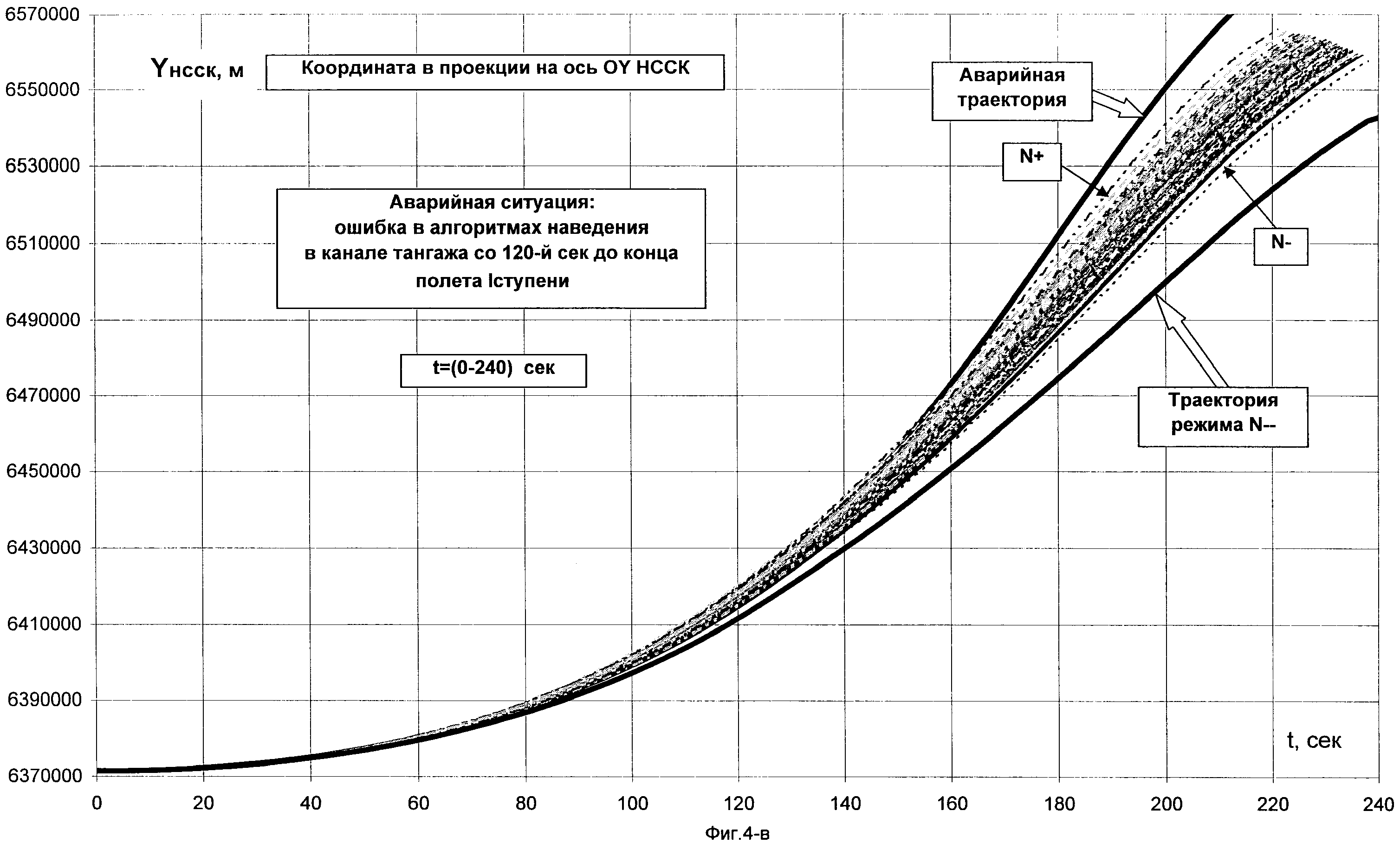
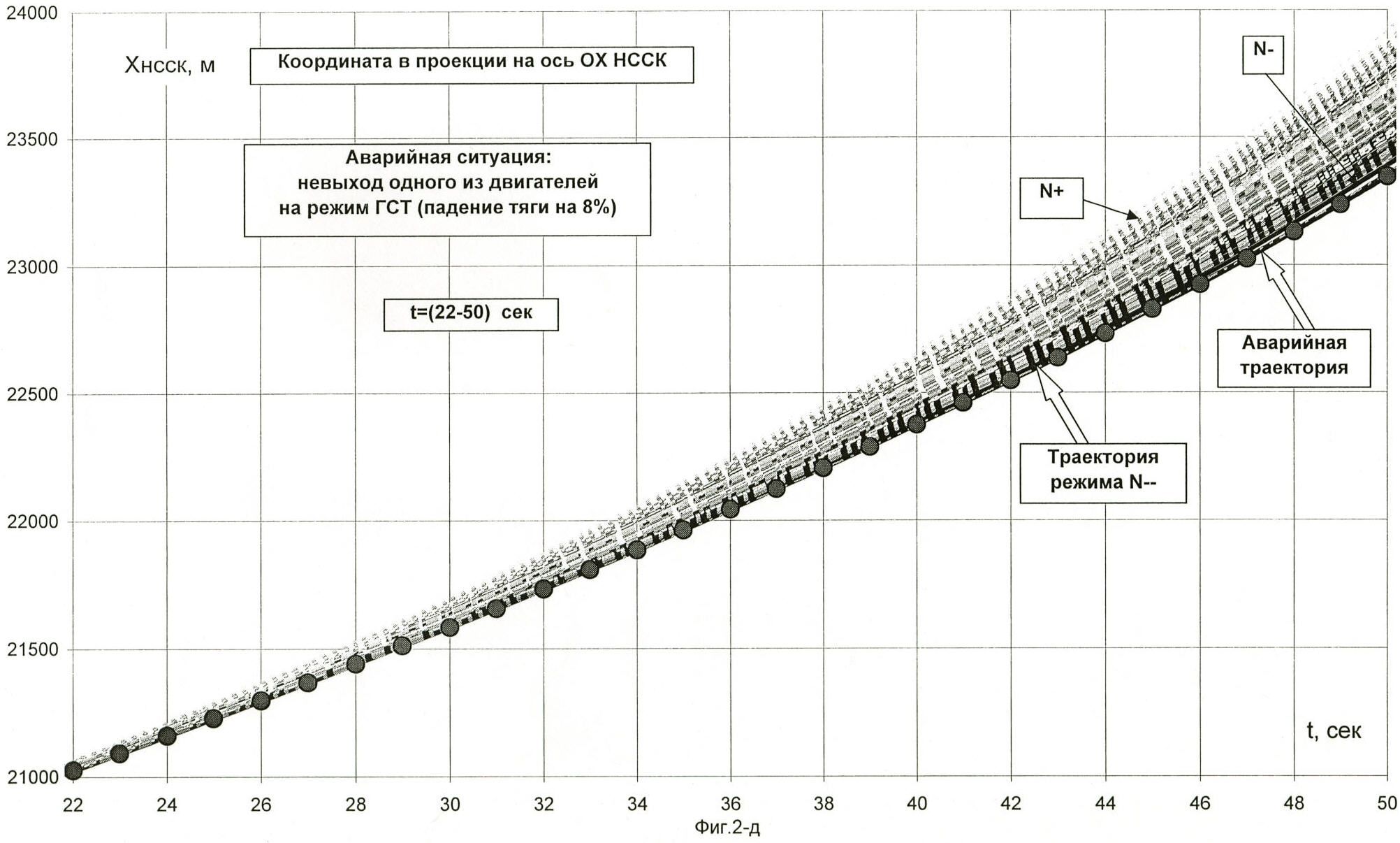
- Граничные значения контролируемых траекторных параметров, которые по компонентам (VХНССК, VУНССК, XНССК, YНССК) в продольном движении задаются нижней (-) и верхней (+) границами, а по компонентам (VZНССК, ZНССК) в боковом движении - правой (-) и левой (+) границами.
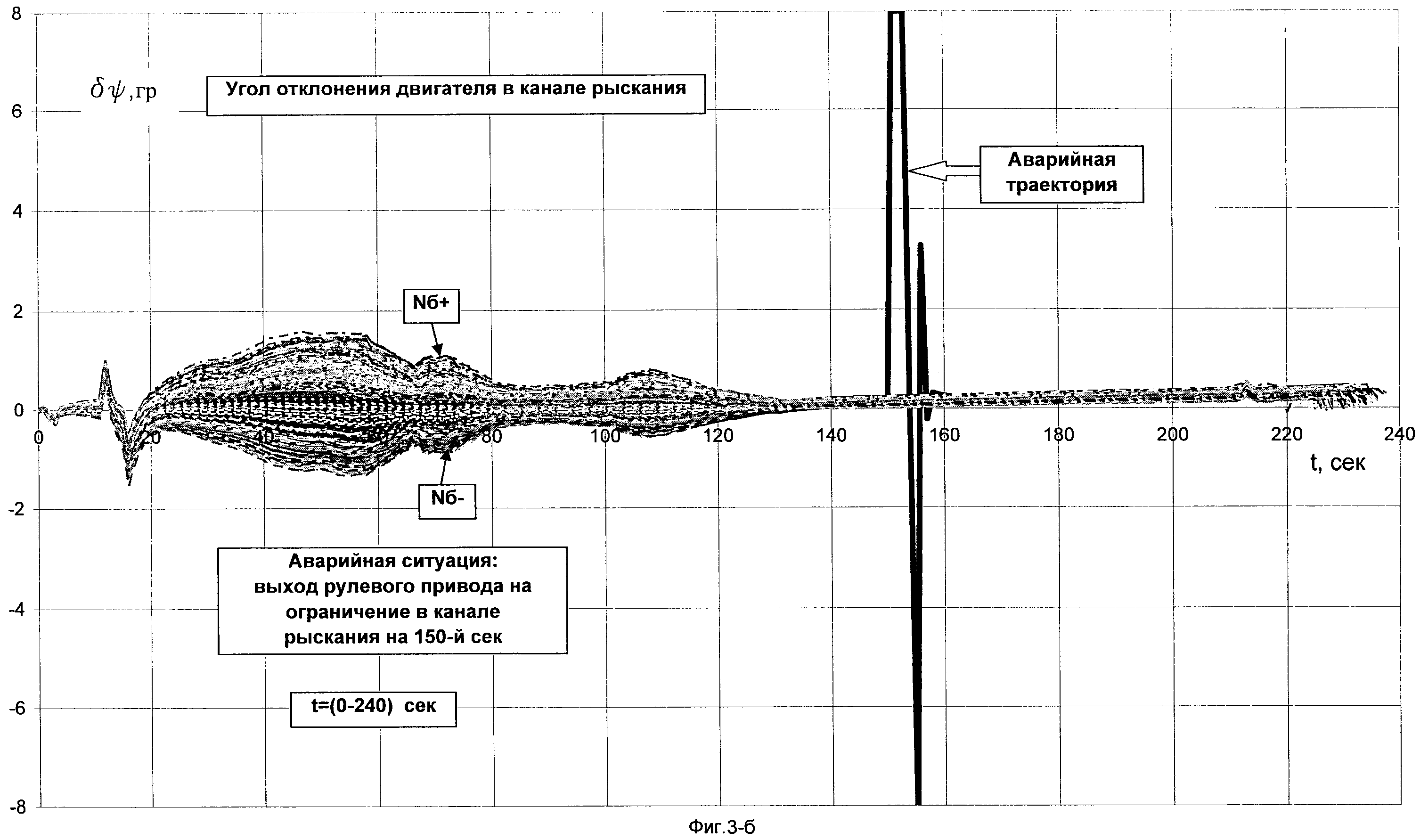
Символами «N+», «N-» (фиг.1, 2, 4) показаны граничные траектории по компонентам продольного движения при учете «попутных» и «встречных» возмущений. Символами «Nб+» и «Nб-» (фиг.3) показаны граничные траектории по компонентам бокового движения при учете «боковых» возмущений в двух противоположных направлениях. Эти граничные траектории соответствуют возможностям РКН как динамической системы «модель движения РКН + алгоритмы управления» по отработке возмущающих факторов с вероятностью Р=0.997 (на уровне 3σ).
Символом «N--» на (фиг.1, 2, 4) показана предельная граничная траектория с состоянием параметров продольного движения (VХНССК, VУНССК, XНССК, YНССК) по нижней границе. Эта траектория определяет предельные отклонения при действии повышенных «встречных» возмущений с величинами, которые могут быть компенсированы при полете последующих ступеней.
Символами «Nб--» и «Nб++» (фиг.3) показаны траектории на предельных режимах полета в боковом движении; показаны граничные - справа и слева - траектории по компонентам (VZНССК, ZНССК) при учете повышенных боковых ветров. Этим траекториям соответствуют увеличенные аэродинамические нагрузки при условии сохранения прочности РКН.
На фиг.1-а, 1-б, 1-в, 1-г, 1-д представлены результаты моделирования, где на номинальной траектории (она находится в середине пучка траекторий) моделируется аварийная ситуация с падением тяги двигателя, приводящая к падению продольной перегрузки на режиме главной ступени тяги (ГСТ) на 20% в диапазоне от 125 сек до 144 сек полета, что превышает предельное падение, соответствующее траектории «N--». Если бы в способе-прототипе [5] эта величина была бы допустимой для принятия решения о выключении двигателя, то он был бы выключен на 126-й сек полета (фиг.1-а). В предлагаемом изобретении даже выход скорости VYНССК за граничную траекторию для режима «N--» на 140 сек полета (фиг.1-б) не приведет к выключению двигателя, так как остальные параметры VХ НССК (фиг.1-в), YНССК (фиг.1-г, ХНССК (фиг.1-д) не выходят за траекторию режима «N--». Это повышает живучесть РКН, т.е. - полетную надежность.
Если частичная потеря тяги двигателя с падением продольной перегрузки nx на 20% происходит одновременно с действием расчетных «попутных» возмущений со 142 сек до конца полета, то рассматриваемая РКН будет также сохранена, а в способе-прототипе потеряна.
На фиг.2а для гипотетической РКН с несколькими двигателями иллюстрируется аварийная ситуация, когда один из двигателей остался на режиме предварительной ступени тяги (ПСТ), а остальные вышли на главную ступень тяги (ГСТ). Падение суммарной тяги РКН с 5-й сек полета составляет 8%. Падение продольной перегрузки примерно такое же. Тем не менее, настраивать систему контроля на такую малую величину, соизмеримую с ошибкой измерения, нецелесообразно. Целевая задача выведения полезной нагрузки на орбиту при этом не решается ни полностью, ни частично. Если на такой РКН минимальный уровень падения продольной перегрузки был бы 20% (как в предыдущих примерах), то эта ситуация распознавалась бы только на 150-й сек полета. Ракета выходит при этом из зоны космодрома. В предлагаемом способе контролируемые параметры продольного движения VУ НССК (фиг.2-б), YНССК (фиг.2-в), VХНССК (фиг.2-г), ХНССК (фиг.2-д) поочередно выходят за свои нижние граничные значения, соответствующие траектории «N--». В худшем случае ситуация распознается на 30-й сек по выходу последнего из этих параметров ХНССК. При наличии на борту РКН прогноза мгновенной точки падения, как это предлагается в изобретении, аварийная РКН после 30-й сек будет приведена в аварийное поле падения в зоне космодрома. Это способствует минимизации экологического ущерба.
На фиг.3 моделируется аварийная ситуация выхода на 150-й сек полета рулевого привода на ограничение в канале рыскания с дальнейшим снятием возмущающего фактора по аналогии с ракетой «Tauras» [10]. Если бы в способе [5] допустимая величина углового рассогласования составляла ±40 гр (в способе [3] эта величина составляет ±10 гр), то отключение двигателя РКН произошло бы через 3 сек (фиг.3-а). На фиг.3-б виден выход на ограничение в 8 гр угла отклонения маршевого двигателя. В предлагаемом изобретении, несмотря на выход скорости VZHCCK (фиг.3-в) за граничную траекторию «Nб--» на 155 сек полета, отключение двигателя не произойдет, так как координата ZHCCK (фиг.3-г) не выходит из трубки допустимого состояния даже за траектории «Nб-», …, «Nб+». В этом случае, как и при полете РН серии «Tauras» [10], полет РКН не будет прерван, что способствует повышению полетной надежности. Если бы возмущающий фактор в этих примерах не исчез, то в предлагаемом способе контроля принятие на борту решения о прекращении полета было бы растянуто по времени, в течение которого можно решать задачу обеспечения экологической безопасности.
Необходимость контроля параметров продольного движения (VХНССК, VУНССК, XНССК, YНССК) по верхней и нижней границам иллюстрируется на примере моделирования аварийной ситуации типа «ошибка в алгоритмах наведения». На фиг.4 представлена соответствующая картина, где эта ошибка действует от 120-й сек до конца полета ступени. В способе [5] подобная аварийная ситуация вообще не идентифицируется. На фиг.4-а видно, что продольная перегрузка практически не отклоняется от номинальной траектории. Угловые отклонения по тангажу, рысканию и крену (Δϑ, Δψ, Δγ) также далеки от предельных значений. В предлагаемом изобретении четыре контролируемых параметра продольного движения выходят за допустимые значения: Vу (фиг.4-б) и Y (фиг.4-в) - за верхнюю границу «N+»; Vx (фиг.4-г) и Х (фиг.4-д) - за нижнюю границу «N--». После 150-й сек борьба за живучесть РКН прекращается и решается задача экологической безопасности с выключением двигателя и падением аварийной РКН в ближайшую разрешенную зону.
Таким образом, идея предлагаемого способа бортового контроля траектории на основе более медленно меняющихся траекторных параметров (VХНССК, VУНССК, XНССК, YНССК) и (VZНССК, ZНССК), нежели контролируемых параметров аварийности - nx (аналога тяги двигателя) и (Δϑ, Δψ, Δγ) - прототипа [5], состоит в том, что в БАСУ периодически по времени полета t вычисляют:
- Условия принадлежности текущих значений компонент продольного движения (VХНССК, VУНССК, XНССК, YНССК) соответствующим допустимым множествам (1)
 , и
, и
 и
и
 , и
, и

- Условия принадлежности текущих значений компонент бокового движения (VZНССК, ZНССК) допустимым множествам (2)

 .
.
- Географические координаты мгновенной точки падения РКН на Землю (при условии выключения двигателей в данный момент времени), если нарушены условия (1) по всем четырем компонентам, продольного движения (VХНССК, VУНССК, XНССК, YНССК) или нарушены условия (2) по обеим компонентам бокового движения (VZНССК, ZНССК) с выключением двигателей РКН при условии, что расчетная мгновенная точка падения находится в одной из безопасных зон.
Благодаря предлагаемому бортовому способу контроля и аварийного прекращения полета достигается:
- повышение живучести (полетной надежности) выполнения РКН целевой задачи выведения полезной нагрузки на орбиту;
- повышение экологической безопасности по трассе полета после того, как дальнейший полет невозможен, за счет целенаправленного выключения двигателей РКН по двум событиям: по выходу контролируемых параметров за допустимые граничные значения и принадлежности прогнозируемой мгновенной точки падения аварийной РКН одной из безопасных зон падения;
- распознавание в БАСУ более широкого класса аварийных ситуаций по сравнению с прототипом [5].
Источники информации
1. Многоразовый ракетно-космический комплекс. Многоразовый орбитальный корабль «Буран». Под ред. Ю.П.Семенова, Г.Е.Лозино-Лозинского, В.Л.Лапыгина, В.А.Тимченко. М.: Машиностроение. 1995.
2. Ракетная и космическая техника. №22(399) от 29.05.1967 г. Стр.12, 13.
3. Система АПР ракеты 8к14. (Информационно-новостная система «Ракетная техника». Опубликовано 07.22.2010).
4. Недайвода А.К., Дермичев Г.Д., Карраск В.К., Перепелицкий Г.Н., Радугин И.С., Хазанович Г.А. Способ управления ракетой. Патент на изобретение №2191343.
5. С.П.Уманский. Ракеты-носители. Космодромы. Рестарт+. М. 2001 г.
6. А.А.Дмитриевский, Н.М.Иванов, Л.Н.Лысенко. Баллистика и навигация ракет. М.: Машиностроение. 1985 г.
7. Сихарулидзе Ю.Г. Баллистика летательных аппаратов. М.: Наука. 1982 г.
8. К.С.Колесников. Динамика ракет. М: Машиностроение. 2003 г.
9. Г.Н.Разоренов, Э.А.Бахрамов, Ю.Ф.Титов. Системы управления летательными аппаратами. М.: Машиностроение. 2003 г.
10. Журнал «Новости космонавтики». №7. 2004 г. (стр.26).
11. А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. М.: Оборонгиз. 1962 г.
Способ бортового контроля для аварийного прекращения полета ракеты, заключающийся в контроле бортовой автоматической системой управления траектории движения ракеты космического назначения и выработке аварийной команды на прекращение полета в случае возникновения каких-либо нештатных ситуаций, отличающийся тем, что в систему управления до полета в виде функций времени вводят граничные (±) зависимости по линейным скоростям (Vхнсск, Vунсск, Vzнсск) ± координатам (Хнсск, Yнсск, Zнсск) ± в неподвижной начальной стартовой системе координат, а в полете с помощью системы управления по измеренным угловым и линейным (ускорениям) параметрам движения периодически по времени вычисляют контролируемые параметры:три компоненты земной скорости (Vхнсск, Vунсск, Vzнсск) и три координаты (Хнсск, Yнсск, Zнсск) в начальной стартовой системе координат,граничные (±) параметры по компонентам (Vхнсск, Vунсск, Хнсск, Yнсск) ± продольного движения и по компонентам (Vzнсск, Zнсск) ± бокового движения,условия принадлежности каждой из четырех компонент продольного движения (Vхнсск, Vунсск, Хнсск, Yнсск) и обеих компонент (Vzнсск, Zнсск) бокового движения допустимым множествам, образованным соответствующими граничными зависимостями (Vхнсск, Vунсск, Хнсск, Yнсск) ± и (Vzнсск, Zнсск) ±, и, если нарушены условия принадлежности контролируемых параметров допустимым множествам по всем четырем компонентам продольного движения (Vхнсск, Vунсск, Хнсск, Yнсск) или по двум компонентам (Vzнсск, Zнсск) бокового движения, вычисляют географические координаты мгновенной точки падения ракеты на Землю с аварийным выключением двигателей ракеты при условии, что координаты расчетной мгновенной точки падения находятся в одной из безопасных зон, положение и размеры которых вносятся в систему управления до полета для сравнения текущих координат мгновенной точки падения с допустимыми значениями ближайшей безопасной зоны.
Разъемный стык трубопроводов
Бортовое разъемное соединение
Способ разрушения фрагментов космического мусора
Способ подавления упругих колебаний конструкции ракеты пакетной схемы
Способ определения негерметичности агрегатов, имеющих подвижные элементы
Устройство металлизации корпуса изделия
Способ управления угловым движением ракеты космического назначения
Агрегат с радиальным потоком
Ракетный летательный аппарат
Устройство для открывания и закрывания окон летательного аппарата
Разъемный стык трубопроводов
Бортовое разъемное соединение
Способ разрушения фрагментов космического мусора
Способ подавления упругих колебаний конструкции ракеты пакетной схемы
Способ определения негерметичности агрегатов, имеющих подвижные элементы
Устройство металлизации корпуса изделия
Способ управления угловым движением ракеты космического назначения
Агрегат с радиальным потоком
Ракетный летательный аппарат
Устройство для открывания и закрывания окон летательного аппарата

