Результат интеллектуальной деятельности: Способ формирования астатических быстродействующих демпферов летательных аппаратов
Вид РИД
Изобретение
Изобретение относится к способам формирования демпферов летательных аппаратов (ЛА).
Известен способ (прототип) [1] формирования демпферов крена, тангажа, рыскания,
заключающийся в том, что в каждом канале управления задают требуемое значение угловой скорости ЛА, измеряют угловую скорость ЛА, формируют сигнал разности заданной и измеренной угловых скоростей, а сигнал усиленной разности подают на рулевой привод,
К достоинству прототипа относится быстродействие демпферов.
Недостатками прототипа являются статические ошибки от возмущающих моментов и вариаций динамических коэффициентов ЛА (параметрических возмущений).
Предлагаемое отличие состоит в том, что дополнительно формируют математическую модель движения ЛА в виде звена первого порядка с приближенно известными динамическими коэффициентами эффективности рулевого органа и демпфирования ЛА, подают на ее вход сигнал отклонения рулевого органа, получаемый на основе выходного сигнала астатического рулевого привода с приведенным единичным коэффициентом передачи, формируют первый дополнительный сигнал на рулевой привод в виде выходного сигнала модели ЛА, усиленного с коэффициентом, обратным коэффициенту передачи модели, обеспечивающим положительную обратную связь и интегрирующее свойство эталонного контура привод-модель, формируют второй дополнительный сигнал на рулевой привод в виде усиленного разностного сигнала отклонения измеряемого сигнала угловой скорости ЛА от соответствующего сигнала модели ЛА со знаком, дающим отрицательную обратную связь по сигналу угловой скорости ЛА в разностном сигнале, и одновременно подают его с противоположным знаком дополнительно на вход модели ЛА для сближения угловых скоростей ЛА и его модели и обеспечения астатизма по отношению к управлению, возмущающим моментам, параметрическим возмущениям, либо дополнительные сигналы на рулевой привод формируют на основе структурных преобразований схемы, получаемой по предлагаемому способу, с использованием модели ЛА или без нее с использованием корректирующих устройств.
Такая последовательность действий над сигналами позволяет обеспечить быстродействие демпфера как у прототипа в отличие от традиционного способа формирования астатического демпфера [2], когда перед статическим демпфером ставится последовательно интегрирующее звено с охватом полученной системы обратной связью, что уменьшает быстродействие и затрудняет обеспечение устойчивости, в частности, из-за ограничения скорости отклонений рулевых органов.
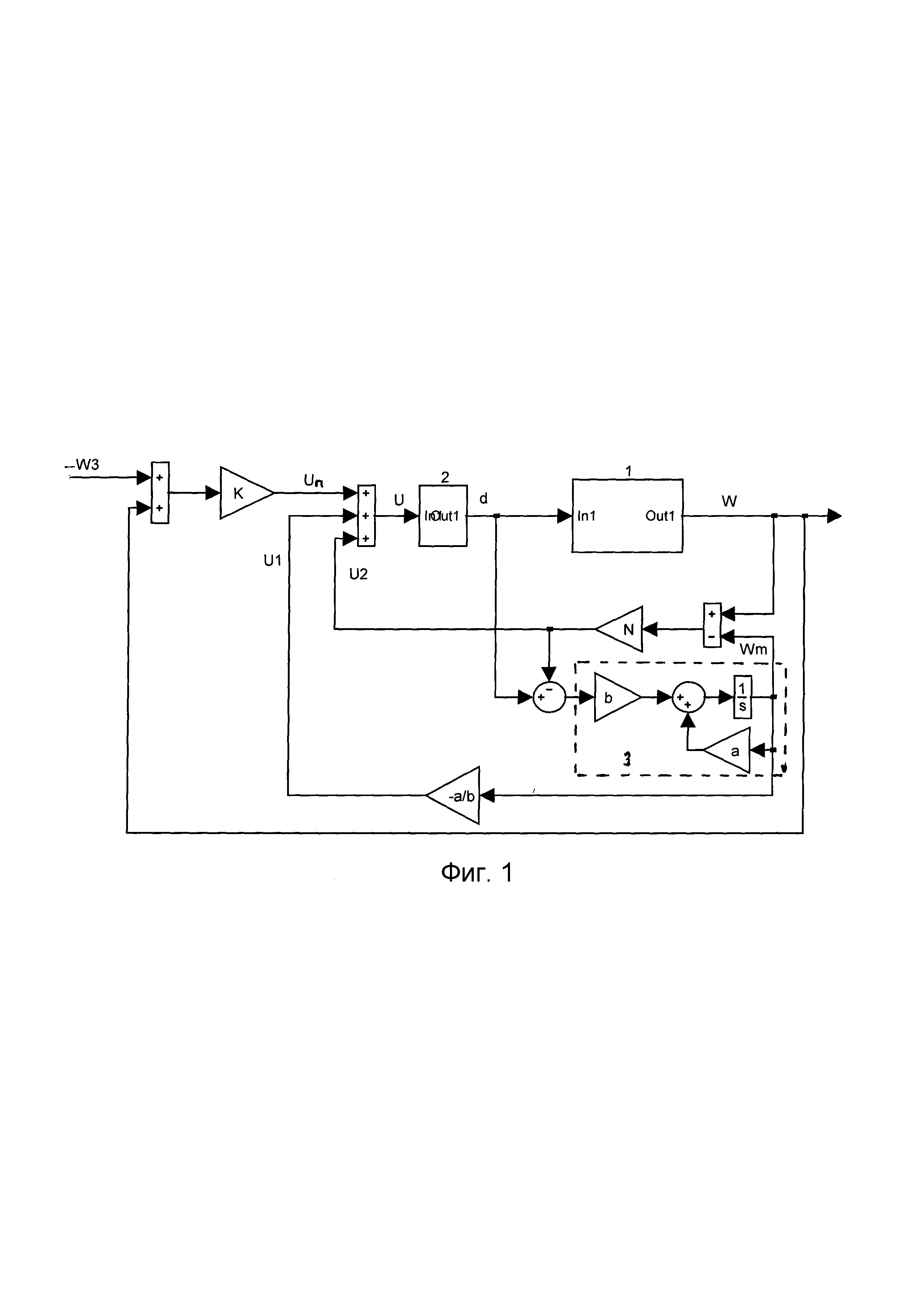
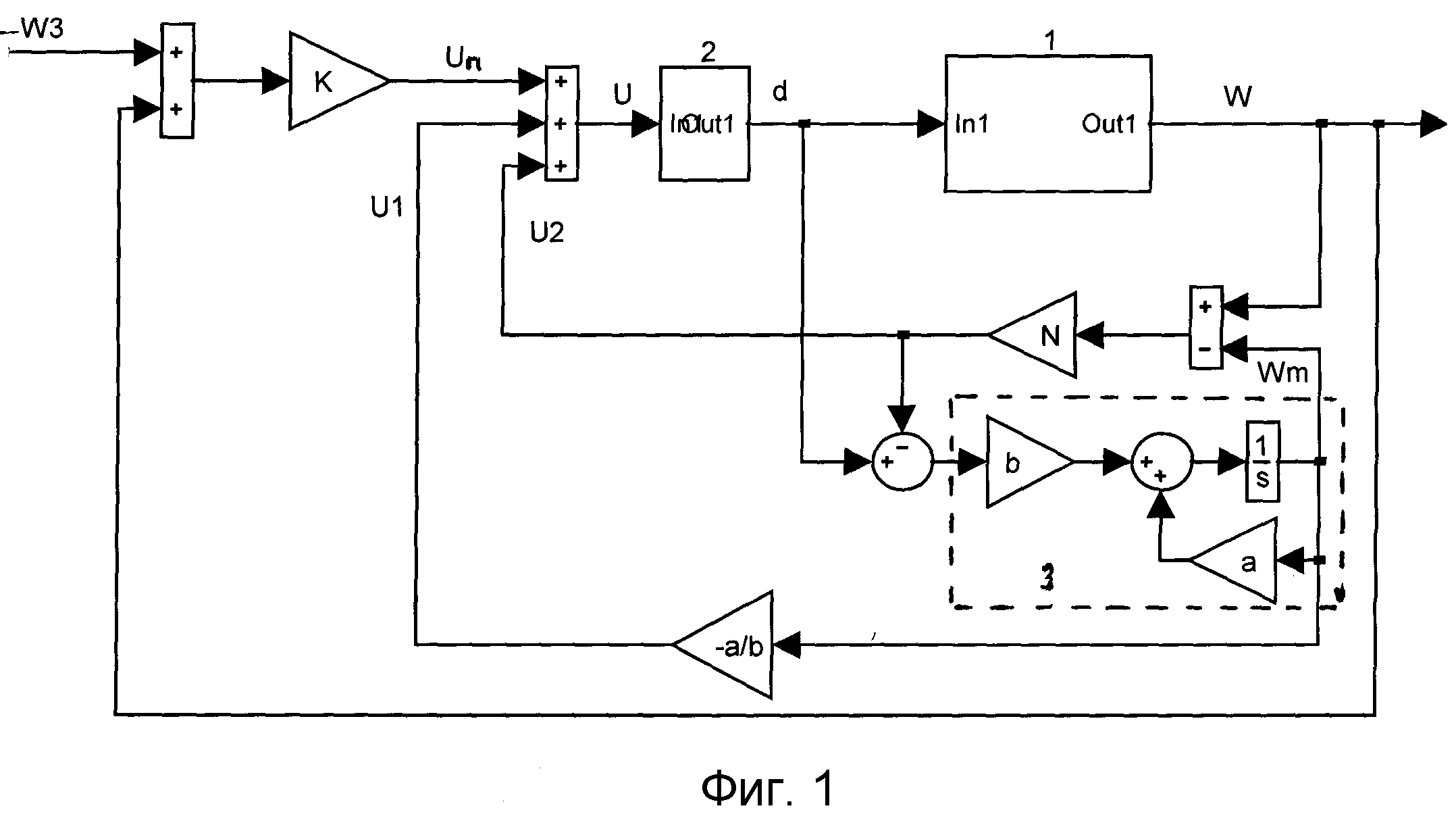
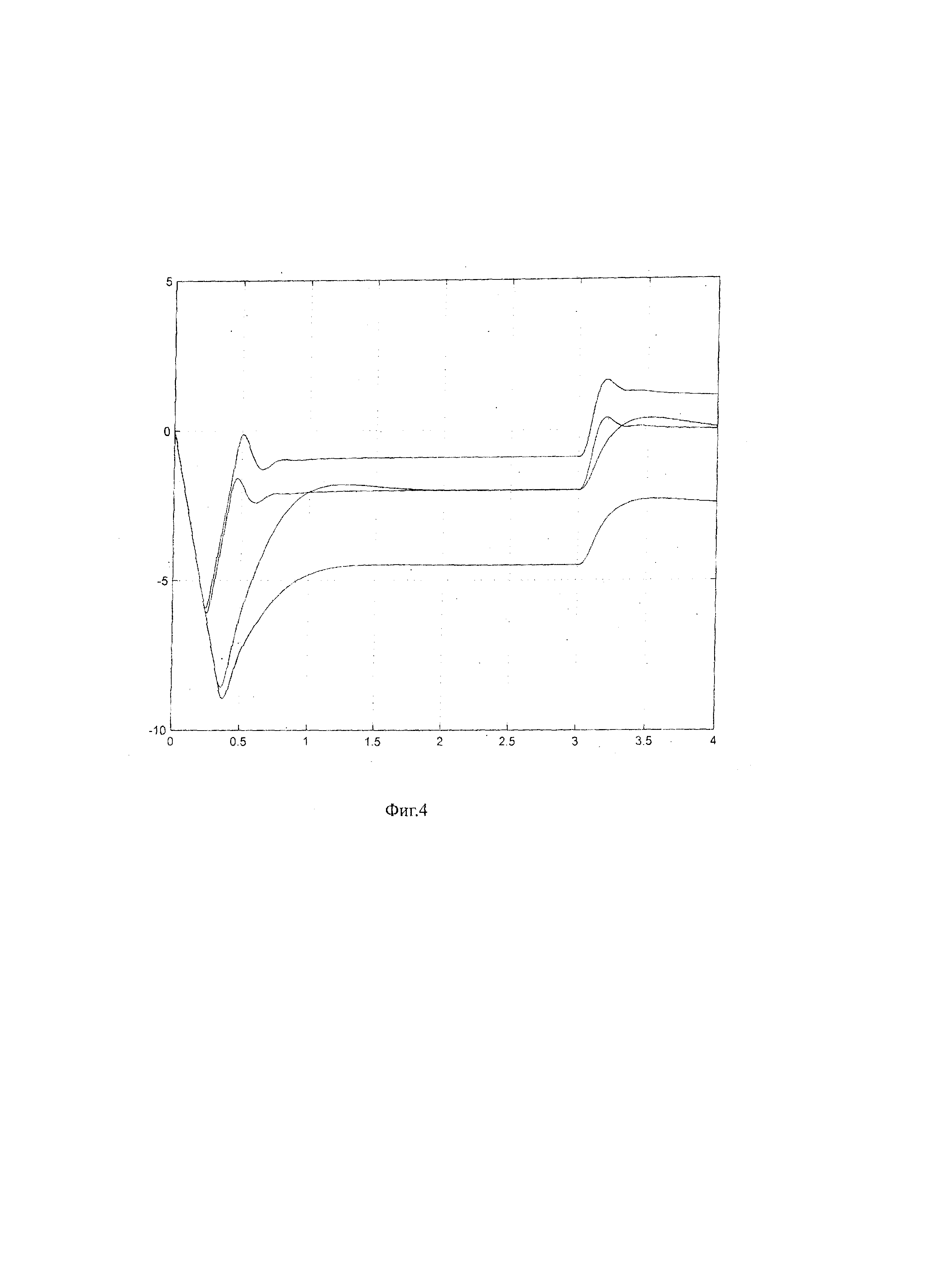
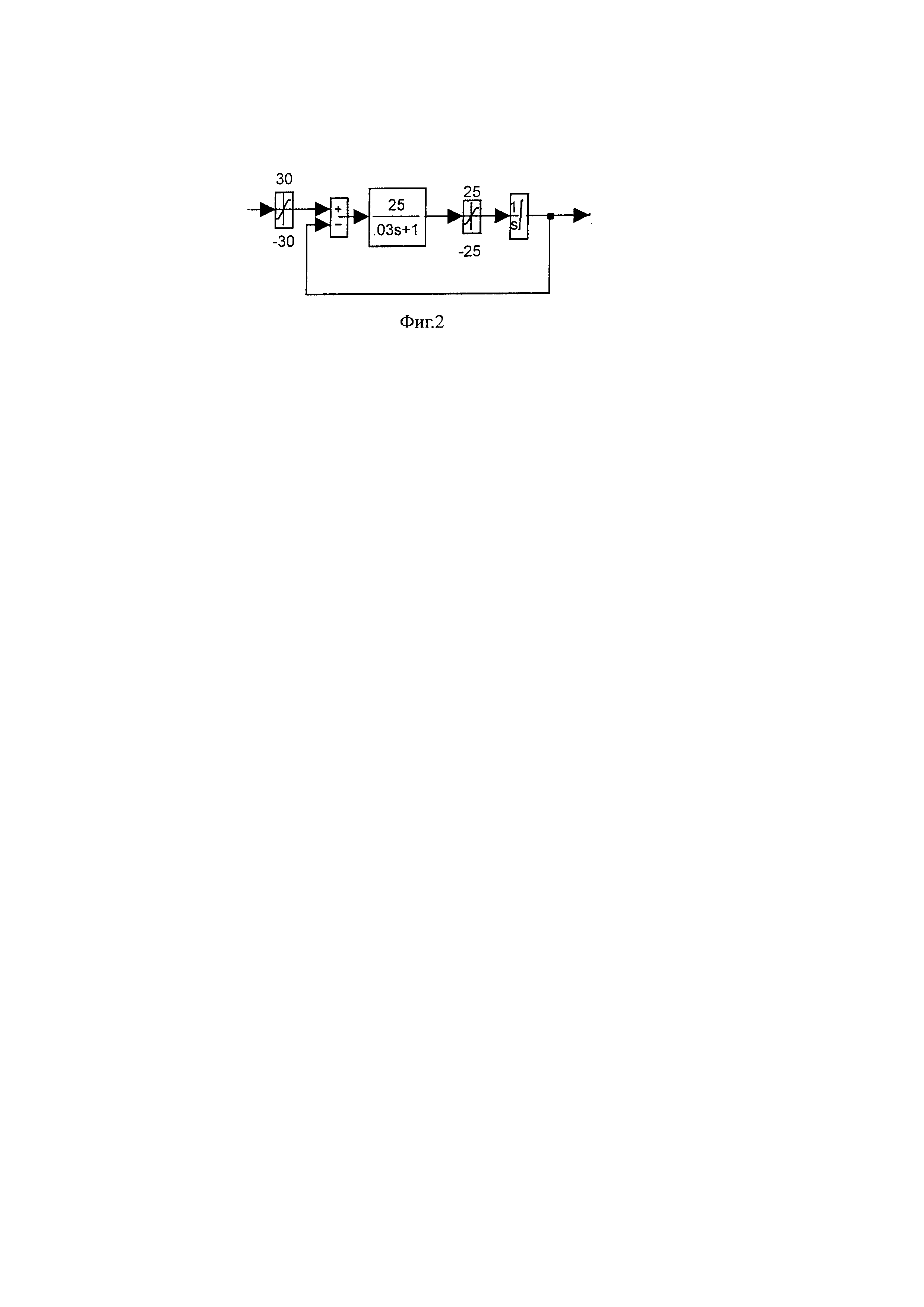
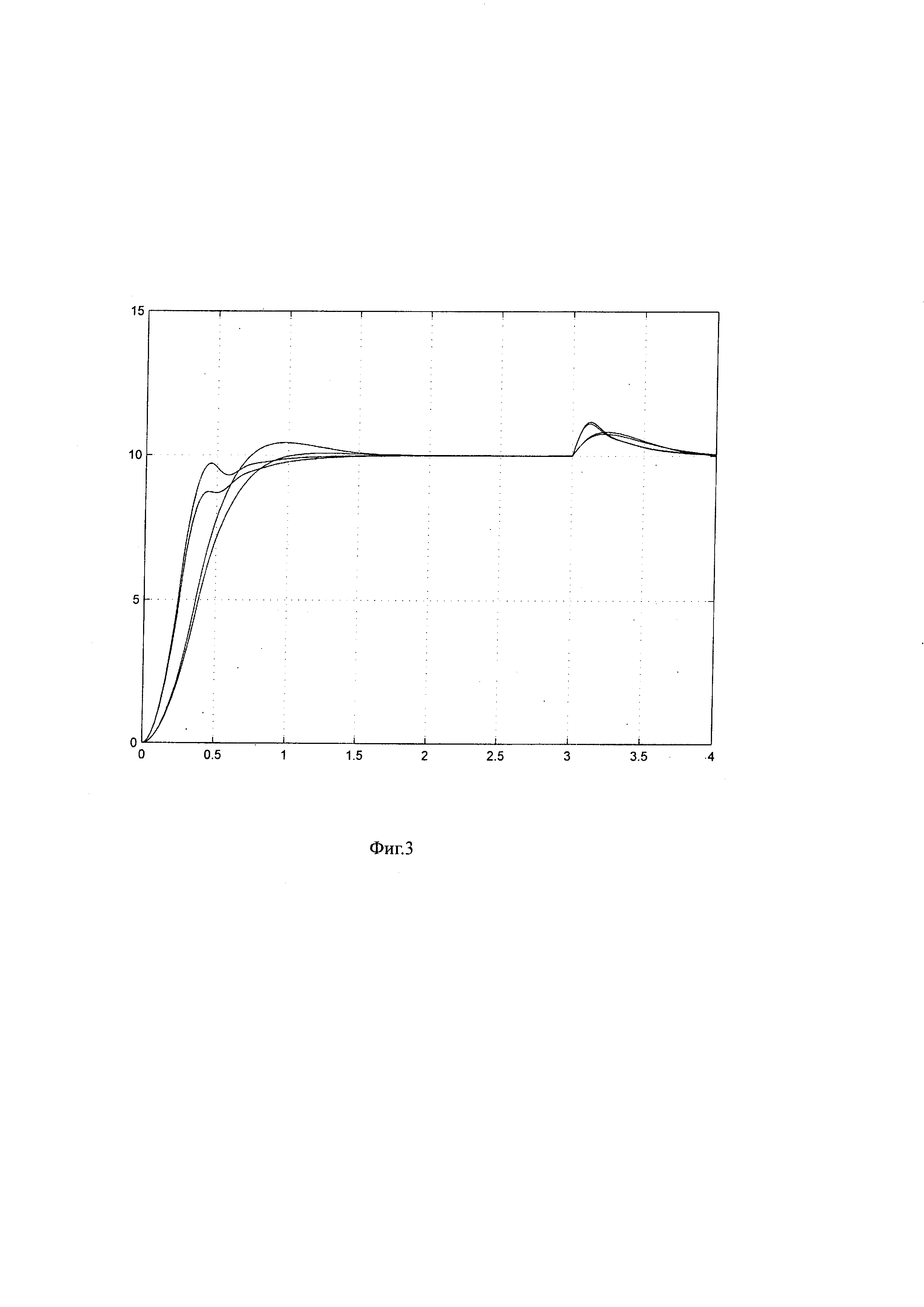
Суть изобретения поясняется фиг. 1, где изображена структурная схема, соответствующая предлагаемому способу формирования какого-либо контура демпфирования ЛА. На фиг. 2 дан пример структурной схемы рулевого привода в схеме фиг. 1, на фиг. 3 представлены переходные процессы отработки ступенчатого заданного сигнала угловой скорости крена с демпфером, сформированным по предложенному способу, при наличии возмущающих моментов и параметрических возмущений. На фиг. 4 показаны процессы отклонения элеронов при работе демпфера крена.
Следует отметить, что структурными преобразованиями схемы реализации способа могут быть весьма разными, в том числе без явной модели ЛА, например, в форме корректирующих устройств в обратных связях рулевого привода и ЛА с одинаковыми знаменателями. Однако, если динамические коэффициенты существенно меняются в зависимости от переменных состояния ЛА, то такие преобразования будут неэквивалентными.
Принятые обозначения:
1. ЛА - летательный аппарат,
2. РП - рулевой привод,
3. МЛА - модель движения ЛА,
ω=w - угловая скорость ЛА;
ωз=wз - заданное значение угловой скорости;
ωм=wm - эталонный сигнал угловой скорости МЛА;
δ=d - угол отклонения рулевого органа (выход РП);
U - суммарный сигнал на входе РП;
Uп - управляющий сигнал РП по прототипу;
U1 - первый дополнительный сигнал РП;
U2 - второй дополнительный сигнал РП;
N - коэффициент усиления разностного сигнала (ω-ωм);
δэ=dэ - угол отклонения элеронов;
К - коэффициент усиления разности (ω-ωз) по прототипу;
(-b)/а - коэффициент передачи МЛА;
Мх возм/Jx - угловое ускорение ЛА от возмущающего момента;
Jx - момент инерции.
Последовательность действий по способу заключается в следующем.
Формируют управляющий сигнал по прототипу
Uп=К(ω-ωз).
Формируют математическую модель движения ЛА (МЛА) в виде звена первого порядка с приближенно известными динамическими коэффициентами эффективности рулевого органа (b) и демпфирования (а) (вычислитель эталонных значений угловой скорости МЛА ωм). Подают на ее вход сигнал рулевого органа как выходной сигнал рулевого привода с приведенным единичным коэффициентом передачи.
Формируют первый дополнительный сигнал на основе выходного сигнала МЛА ωм с коэффициентом усиления, обратным коэффициенту усилении МЛА т.е. с коэффициентом (-а/b), предполагая, что коэффициент усиления астатического привода приведен к единице. В результате
U1=(-a/b)ωм.
Первый дополнительный сигнал дает положительную обратную связь и позволяет обеспечить интегрирующее свойство образующегося эталонного контура привод-модель и разомкнутого контура демпфирования.
Формируют второй дополнительный сигнал рулевого привода, как усиленный разностный сигнал отклонения измеряемого сигнала угловой скорости ЛА от эталонного сигнала МЛА
U2=N(ω-ωм).
В результате суммарный управляющий сигнал рулевого привода равен
U=Uп+U1+U2.
Второй дополнительный сигнал одновременно подают на вход МЛА, т.е. суммируют с сигналом отклонения рулевого органа.
Такое использование второго дополнительного сигнала рулевого привода обеспечивает интегрирующие свойства разомкнутого контура демпфирования и его пониженную чувствительность к неопределенности некоторых параметров ЛА согласно теории модально инвариантных систем [2] и патенту [3].
Коэффициенты усиления разностных сигналов К и N выбирают исходя из требований быстродействия и пониженной чувствительности к параметрическим возмущениям с учетом измерительного шума и инерционности датчика угловой скорости ЛА.
Рассмотрим предлагаемый способ на примере формирования демпфера крена самолета согласно упрощенному линеаризованному уравнению при постоянной скорости полета в следующем виде

где ωх - угловая скорость крена ЛА
δэ=dэ - угол отклонения элеронов,
a, b - динамические коэффициенты (демпфирования крена и эффективности элеронов),
Мх возм/Jx - угловое ускорение самолета, вызванное возмущающим моментом Мх возм и другими моментами, вызванными влиянием других переменных состояния самолета.
Пусть априорные значения динамических коэффициентов равны: а=-1, b=-5, а угловое ускорение Мх возм/Jx=10 град/с2.
Пусть рулевой привод имеет структурную схему, соответствующую фиг. 2.
Формируем модель движения ЛА с помощью уравнения ЛА с динамическими коэффициентами, соответствующими режиму полета.
dωхм/dt=-ωхм-5δэ..
Согласно прототипу и предлагаемому способу управляющий сигнал рулевого привода U равен сумме сигнала прототипа и двум дополнительным сигналам U1 и U2
U=K(ωх-ωз)+U1+U2,
где К - коэффициент усиления сигнала разности угловой скорости ЛА и заданного значения ее.
Формируем первый дополнительный сигнал согласно предлагаемому способу
U1=(-1/5), ωхм,
где коэффициент (-1/5) - обратный коэффициент передачи МЛА.
Формируем второй дополнительный сигнал
U2=N(ωx-ωхм).
где N возьмем равным, например, единице N=1, полагая это значение приемлемым при имеющемся измерительном шуме датчика угловой скорости.
Второй дополнительный сигнал U2 одновременно подаем с противоположным знаком на МЛА. В результате МЛА имеет окончательное уравнение
dωхм/dt=-ωхм-5(δэ-N(ωx-ωхм)).
Значение коэффициента К целесообразно выбирать с учетом возможной неопределенности значений динамических коэффициентов. Полагая, например, что каждый из динамических коэффициентов (эффективности и демпфирования) может независимо изменяться в полтора раза в обе стороны от расчетного (априорного, эталонного) значения, то получится четыре варианта предельных разбросов динамических коэффициентов ЛА. Коэффициент К в рассматриваемом примере, обеспечивающий минимальную длительность наиболее быстрого переходного процесса при перерегулировании не большем 5% примерно равен 1.
На фиг. 3 приведены графики переходных функций (процессов) отработки ступенчатых заданных значений угловой скорости ωз=10 град/с для указанных 4-х вариантов с учетом возмущающего момента на 3-ей секунде. Наиболее быстрый процесс получается при значениях b=-7.5 и а=-0.67. Наиболее медленный - при значениях b=-3.33 и а=-1.5.
Как видим, сформированный по предлагаемому способу демпфер крена является астатическим по отношению к управляющему сигналу, возмущающему моменту на 3-ей секунде и параметрическим возмущениям, а также имеет малый разброс переходных процессов.
На фиг. 4 приведены графики отклонений элеронов, соответствующих процессам фиг. 3, которые свидетельствуют о быстродействии демпфера, близком к оптимальному, так как они отклоняются практически на предельных скоростях отклонений, реализуемых рулевым приводом.
Сравнение процессов, получаемых предложенным способом и традиционным с использованием интеграла в прямой цепи разомкнутого демпфера, показывает, что при заданном значении угловой скорости 10 град/с традиционным способом можно получить примерно такие процессы. Однако, при увеличении заданной угловой скорости до 20 град/с и выше традиционная система теряет устойчивость, а предлагаемая сохраняет приемлемое качество.
Следует отметить возможность реализации изобретения для линейного объекта без явной модели ЛА с помощью корректирующих устройств, получаемых путем структурных преобразований схемы. Так для рассмотренного примера линейного ЛА корректирующее устройство по результирующему сигналу отклонения элеронов должно иметь передаточную функцию вида 6/(s+6) (положительная обратная связь), а корректирующее устройство по угловой скорости должно иметь передаточную функцию вида s/(s+6) (отрицательная обратная связь в разомкнутом контуре).
Литература
1. Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. 240 с.
2. Елисеев В.Д, Комаров А.К. Модально-инвариантные системы управления. Уч. пособие. - М.: Изд. МАИ, 1983, 69 с.
3. Елисеев В.Д., Котельникова А.В. Чемоданов В.Б., Похваленский В.Л., Евдокимчик Е.А. Кисин Е.Н. Патент на изобретение №2570127. Способ формирования астатических систем управления объектами с неопределенными параметрами на основе встроенных моделей и модальной инвариантности. Бюль. №34.
Перечень названий фигур
Фиг. 1. Структурная схема предлагаемого демпфера ЛА.
Фиг. 2. Структурная схема рулевого привода (РП).
Фиг. 3. Переходные процессы угловой скорости крена самолета.
Фиг. 4. Процессы отклонения элеронов.
Способ формирования астатических систем управления объектами с неопределенными параметрами на основе встроенных моделей и модальной инвариантности
Устройство для предварительной раскрутки ротора беспилотного гироплана
Способ формирования математической модели человека-оператора при отслеживании заданных положений штурвала по директорному прибору
Гибридная мультироторная летающая платформа

