Результат интеллектуальной деятельности: Гибридная мультироторная летающая платформа
Вид РИД
Изобретение
Изобретение относится к области малой авиации, к конструкции летающих мультироторных платформ (МРП).
Основное назначение устройства - перемещение в воздушном пространстве полезной (целевой) нагрузки. К настоящему времени во всем мире накоплен большой опыт по созданию и эксплуатации МРП. Данные летательные аппараты (ЛА), построенные по квадрокоптерной схеме, широко используются для аэрофотосъемки, мониторинга окружающей среды, в работе экстренных служб, транспортировки небольших грузов и т.п.
Недостатками этих ЛА, заметно сужающими сферу их применения, являются малое полетное время (около получаса) и невысокая грузоподъемность (1-2 кг). Одной из причин, сдерживающих дальнейшее развитие данного класса ЛА, является сравнительно небольшая плотность энергии в аккумуляторах, питающих электродвигатели несущих воздушных винтов. Сопоставительный анализ показывает, что удельная плотность энергии в углеводородном топливе более чем в 50 раз превышает этот показатель у современных химических аккумуляторов. Таким образом, на достигнутом к настоящему времени технологическом уровне наиболее эффективным средством увеличения грузоподъемности и полетного времени рассматриваемого класса ЛА является использование гибридной силовой установки, в которой двигатель внутреннего сгорания (ДВС) используется для генерации электроэнергии и создания большей части подъемной силы посредством основных несущих воздушных винтов, а угловая стабилизации ЛА осуществляется по квадрокоптерной схеме - с помощью быстродействующих электродвигателей, вращающих стабилизирующие воздушные винты. При этом последние в целях обеспечения требуемого быстродействия контуров угловой стабилизации имеют меньший диаметр, чем основные винты.
В настоящее время существуют конструктивные решения, в которых реализован принцип построения МРП по гибридной схеме. Аналогами предлагаемого технического решения являются следующие разработки.
Четырехвинтовой аппарат «Yeair» [https://yeair.de/], в конструкции которого каждый из 4-х несущих винтов соединен с соответствующим бензиновым ДВС через промежуточный быстродействующий электродвигатель. Недостатками данной конструкции является снижение энергетической эффективности бензинового двигателя из-за периодически возникающего тормозящего момента со стороны электродвигателей, а также потеря аппаратом работоспособности при отказе одного из ДВС или электродвигателя.
Восьми винтовой аппарат "Airborg" [http://www.tflighttech.com/products/airborg-h8-10k-with-top-flight-hybrid-power-system.html], в конструктивной схеме которого используются 4 пары соосных несущих винтов, приводимых в движение 8-ю электродвигателями, электроэнергия для которых вырабатывается бортовым генератором, вращение которого обеспечивается бензиновым двигателем.
Наиболее близким аналогом является летательный аппарат "Hibris" [http://www.quaternium.com/uav/hybrix-20/]. В этом аппарате установлены один бензиновый и четыре электрических двигателя. Этот аппарат также оснащен генератором для преобразования механической энергии вращения выходного вала бензинового двигателя в электроэнергию для питания электродвигателей несущих винтов.
Недостатками приведенных выше схем с полностью гибридной силовой установкой являются технологическая сложность, высокая стоимость и значительная масса бортового генератора, поскольку через него пропускается весь объем энергии, необходимой для полета МРП. Это приводит к снижению располагаемой массы полезной нагрузки и времени нахождения ЛА в воздухе. Кроме того, двукратное преобразование энергии сначала из механической формы в электрическую в генераторе, а затем из электрической формы в механическую в двигателях несущих винтов сопровождается неизбежными потерями, пропорциональными величине преобразуемой энергии. Помимо этого, у данных аппаратов сочетание в несущих воздушных винтах функций создания подъемной силы и угловой стабилизации аппарата затрудняет осуществление режима авторотации воздушных винтов при аварийном спуске, что повышает риск потери аппарата и его полезной нагрузки при возникновении нештатных ситуаций.
Предлагаемое изобретение позволяет увеличить грузоподъемность МРП в 2-3 раза, а время нахождения в воздухе до 3-4 часов по сравнению с известными аналогами.
Заявленный технический результат достигается тем, что гибридная мультироторная летающая платформа, содержащая монтажную раму, на которой попарно диаметрально противоположно друг другу установлены четыре электродвигателя, на каждом из которых сверху установлены по одному воздушному винту угловой стабилизации, при этом, электродвигатели соединены с бортовой аккумуляторной батареей через полетный микроконтроллер; под рамой, под винтами угловой стабилизации, диаметрально противоположно по отношению друг к другу, установлены по меньшей мере два шарнирно закрепленных аэродинамических руля управления с рулевыми машинками, которые электрически связаны с полетным микроконтроллером; при этом, под рамой, между воздушными винтами угловой стабилизации, попарно, диаметрально противоположно друг другу установлены четыре несущих винта, связанные через муфту сцепления с валом двигателя внутреннего сгорания, который закреплен под рамой, в центре; вал двигателя внутреннего сгорания механически связан с электрическим генератором, соединенным с бортовой аккумуляторной батареей.
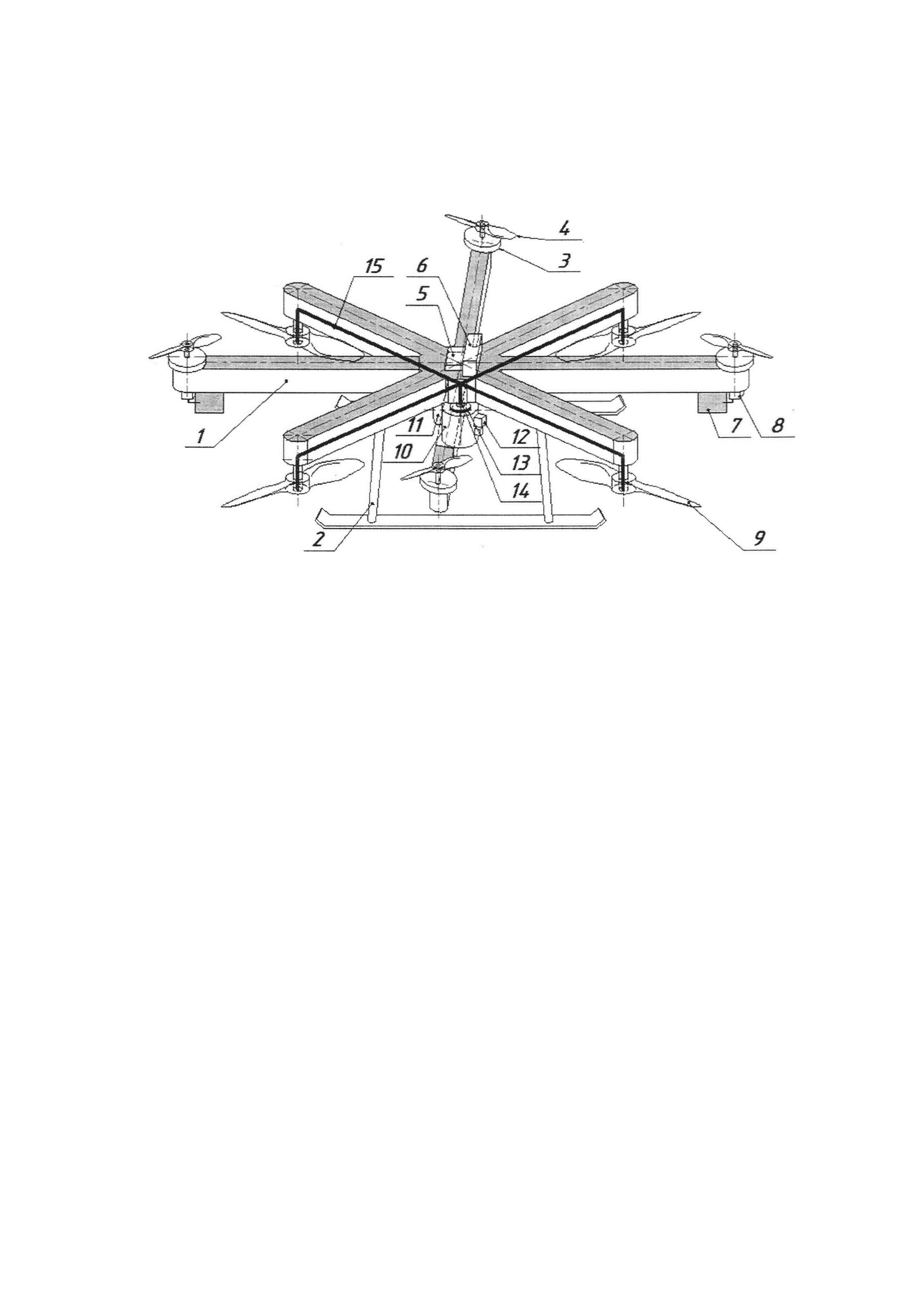
Заявляемое изобретение поясняется фигурой, на которой изображена конструктивная схема гибридной мультироторной летающей платформы.
Основу конструкции составляет монтажная рама 1 снабженная шасси 2. На монтажной раме 1 попарно диаметрально противоположно друг другу установлены четыре быстродействующих электродвигателя 3, приводящих в попарно противоположное вращение воздушные винты угловой стабилизации 4, которые закреплены на электродвигателях 3. Управление электродвигателями 3 осуществляется полетным микроконтроллером 5, снабженным датчиком угловой ориентации МРП и соединенным с регулятором электрического напряжения бортовой аккумуляторной батареи 6. Под рамой 1, под двумя диаметрально противоположно расположенными электродвигателями 3, шарнирно закреплены аэродинамические рули управления 7, управление которыми осуществляется рулевыми машинками 8, электрически связанными с полетным микроконтроллером 5.
Под рамой 1 между воздушными винтами угловой стабилизации попарно диаметрально противоположно друг другу установлены четыре несущих винта 9, создающие необходимую подъемную силы для полета МРП.
Несущие винты 9 механически связанны с выходным валом 14 ДВС 10 через управляемую муфту сцепления 13 и механическую трансмиссию 15. Несущие винты 9 приводятся в попарно противоположное вращение и по сигналу микроконтроллера 5 могут включаться и выключаться. Привод дроссельной заслонки 12 ДВС, регулирующий скорость вращения выходного вала ДВС, управляется путем подачи сигнала от полетного микроконтроллера 5. Помимо механической трансмиссии 15 несущих воздушных винтов 9, выходной вал 14 ДВС механически связан с генератором электроэнергии 11, который через регулятор напряжения электрически связан с бортовой аккумуляторной батареей 6.
Устройство работает следующим образом. Подъем, зависание и спуск МРП обеспечивается путем изменения скорости вращения четырех несущих винтов 9, посредством изменения режима работы ДВС 10. Несущие винты 9 создают подъемную силу, примерно равную по величине весу аппарата с полезной нагрузкой. Воздушные винты угловой стабилизации 4 осуществляют управление МРП по углам тангажа и крена за счет изменения скоростей их вращения по сигналам от полетного микроконтроллера 5, поступающих на электродвигатели 3. Управление по углу рыскания осуществляется путем разворота аэродинамических рулей управления 7. Муфта сцепления 13 позволяет механически подключать и отключать несущие винты 9 к выходному валу 14 ДВС. Генератор электроэнергии 11, вращаемый ДВС, подпитывает уровень заряда бортовой аккумуляторной батареи 6.
Предлагаемое конструктивное решение имеет следующие преимущества перед его аналогами.
1. Основное преимущество состоит в снижении массы и стоимости бортового генератора гибридной МРП за счет разделения функций создания подъемной силы и угловой стабилизации между двумя группами воздушных винтов и использования механической трансмиссии между выходным валом ДВС и несущими воздушными винтами. Так же достоинством предлагаемого конструктивного решения является возможность спуска МРП в авторотирующем режиме, существенно повышающая ее живучесть при аварийной посадке. Это реализуется за счет отключения несущих воздушных винтов от ДВС посредством муфты сцепления.
2. Четыре несущих винта, вращаемые от одного ведущего вала, позволяют получить большую суммарную подъемную силу, чем один или два при одной и той же мощности ДВС [Александров В. А. "Воздушные винты" http://airspot.ru/library/book/aleksandrov-v-a-vozdushnye-vinty] в сочетании с меньшим разбросом силы тяги по каждому из винтов.
3. Использование аэродинамических рулей направления для управления по углу рыскания позволяет получить больший диапазон возможных управляющих моментов вокруг вертикальной оси, что снижает вероятность срыва управления МРП при действии возмущающего момента по сравнению с классической квадрокоптерной схемой (управление по углу рыскания за счет попарной разбалансировки скоростей вращения воздушных винтов).
4. Снижение нагрузки на воздушные винты угловой стабилизации за счет снятия с них функции управления по рысканию позволяет использовать для обеспечения их вращения электродвигатели меньшей мощности, что в свою очередь позволяет применять малогабаритные и более легкие генератор электроэнергии и бортовую аккумуляторную батарею. Это позволяет облегчить конструкцию и снизить стоимость ЛА.
5. Передача крутящего момента на несущие винты с помощью механической передачи позволяет уменьшить потери на преобразование механической энергии в электрическую.
Совокупность указанных преимуществ предлагаемого конструктивного решения позволяет увеличить грузоподъемность МРП в 2-3 раза, а время нахождения в воздухе до 3-4 часов.
Гибридная мультироторная летающая платформа, содержащая монтажную раму, на которой попарно, диаметрально противоположно друг другу, установлены четыре электродвигателя, на каждом из которых сверху установлены по одному воздушному винту угловой стабилизации, при этом электродвигатели соединены с бортовой аккумуляторной батареей через полетный микроконтроллер; под рамой, под винтами угловой стабилизации, диаметрально противоположно по отношению друг к другу, установлены по меньшей мере два шарнирно закрепленных аэродинамических руля управления с рулевыми машинками, которые электрически связаны с полетным микроконтроллером; при этом под рамой, между воздушными винтами угловой стабилизации, попарно, диаметрально противоположно друг другу, установлены четыре несущих винта, связанных через муфту сцепления с валом двигателя внутреннего сгорания, который закреплен под рамой, в центре; вал двигателя внутреннего сгорания механически связан с электрическим генератором, соединенным с бортовой аккумуляторной батареей.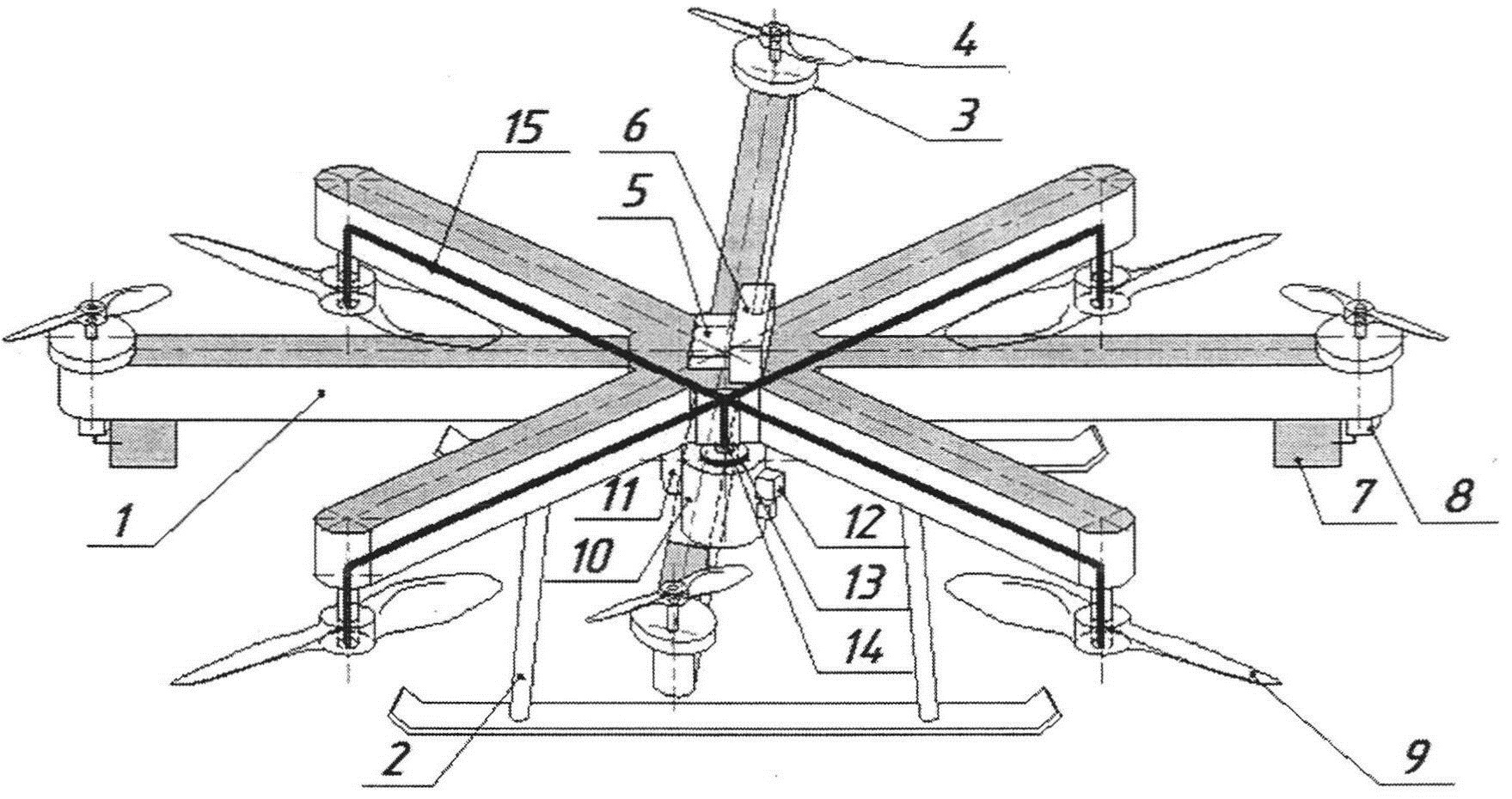
Способ формирования астатических систем управления объектами с неопределенными параметрами на основе встроенных моделей и модальной инвариантности
Способ формирования траектории полета информационного летательного аппарата и устройство для его осуществления
Устройство для предварительной раскрутки ротора беспилотного гироплана
Способ формирования математической модели человека-оператора при отслеживании заданных положений штурвала по директорному прибору
Способ формирования астатических быстродействующих демпферов летательных аппаратов

