Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предлагаемое изобретение относится к электротехнике и может быть использовано в системах управления шаговыми двигателями (ШД) в дискретных электроприводах. Данное техническое решение может применяться преимущественно при решении задачи определения механического упора электропривода с работающим в полношаговом режиме биполярным шаговым двигателем без потери синхронизма и установке этого привода в начальное положение.
Известны способы определения начального положения электропривода с двухобмоточным шаговым двигателем с использованием бесконтактных методов, основанных на контроле изменений электрических параметров (обычно напряжений или токов) в обмотках ШД при встрече с механическим упором в процессе движения. Например, в [1] измеряют токи в обмотках двухфазного ШД и вычисляют среднее и действующее значения, а также время установления амплитуды тока и их различия по сравнению со значениями, полученными на предыдущих шагах. Данное техническое решение подразумевает хранение и обработку в реальном времени существенного объема информации о перечисленных выше параметрах как минимум за четыре предыдущих шага, что требует значительных вычислительных ресурсов. В техническом решении [2], для трехфазного ШД, работающего в режиме микрошага, синхронно с выполнением микрошагов измеряют сумму токов, определяют действующее значение суммы токов на интервале полного шага, сравнивают полученный результат с пороговым значением и при превышении действующего значения над пороговым определяют момент достижения механического упора. Данное решение не может быть использовано для определения останова ШД, работающего в полношаговом режиме, и требует выполнения значительного объема вычислительных процедур, выполняемых в реальном масштабе времени. Подобное решение описано в [3] и обладает теми же ограничениями.
Кроме того, при использовании для определения момента достижения механического упора в уже существующей системе управления ШД упомянутых выше технических решений потребуется установка дополнительных датчиков тока, что может вызвать затруднения. Поэтому наряду со способами определения момента достижения механического упора по измерениям токов все чаще предлагаются методы, основанные на анализе напряжений на обмотках ШД.
Наиболее близкими к предполагаемому изобретению являются технические решения, предложенные в [4] и [5] и представляющие собой способ и устройство для обнаружения механического упора в ШД, в котором параметры обратной эдс определяются непосредственно из формы сигнала на его обмотках. За прототип принято изобретение [4]. Данный способ-прототип включает операции: получение входного сигнала в виде интеграла выпрямленного сигнала противо-эдс шагового двигателя; обнаружение первого максимума входного сигнала, причем первый максимум должен превышать предопределенный порог первого максимума; обнаружение минимума входного сигнала, причем разность между первым максимумом и следующим за ним минимумом должна превышать предопределенную разность между максимумом и минимумом; обнаружение второго максимума входного сигнала, причем второй максимум должен превышать предопределенный порог второго максимума; и формирование выходного сигнала на вход анализатора, если были обнаружены первый максимум, минимум и второй максимум и они удовлетворяют заданным пороговым условиям.
Так как измерение сигнала противо-эдс (back EMF) производится всегда на обесточенной обмотке, то данное техническое решение применимо только в случае работы ШД с поочередным включением обмоток (так называемый «волновой режим»). Такой способ управления ШД называют волновой последовательностью "one phase on" full step или wave drive mode [6]. В настоящее время чаще применяется полношаговый режим с двумя одновременно включенными обмотками, обеспечивающий примерно на 40% больший движущий момент, чем в случае с поочередным включением обмоток. Его называют "two-phase-on" full step или full step mode. Реализация описанного способа [4] требует значительных аппаратных и программных ресурсов для преобразования аналоговых сигналов в цифровые значения, хранения результатов отсчетов измеряемых процессов, последовательного выполнения арифметических и логических операций.
Задачами предполагаемого изобретения являются: упрощение способа и устройства для определения момента достижения электроприводом механического упора, расширение их области применения, снижение аппаратных и программных затрат, а также повышение помехозащищенности.
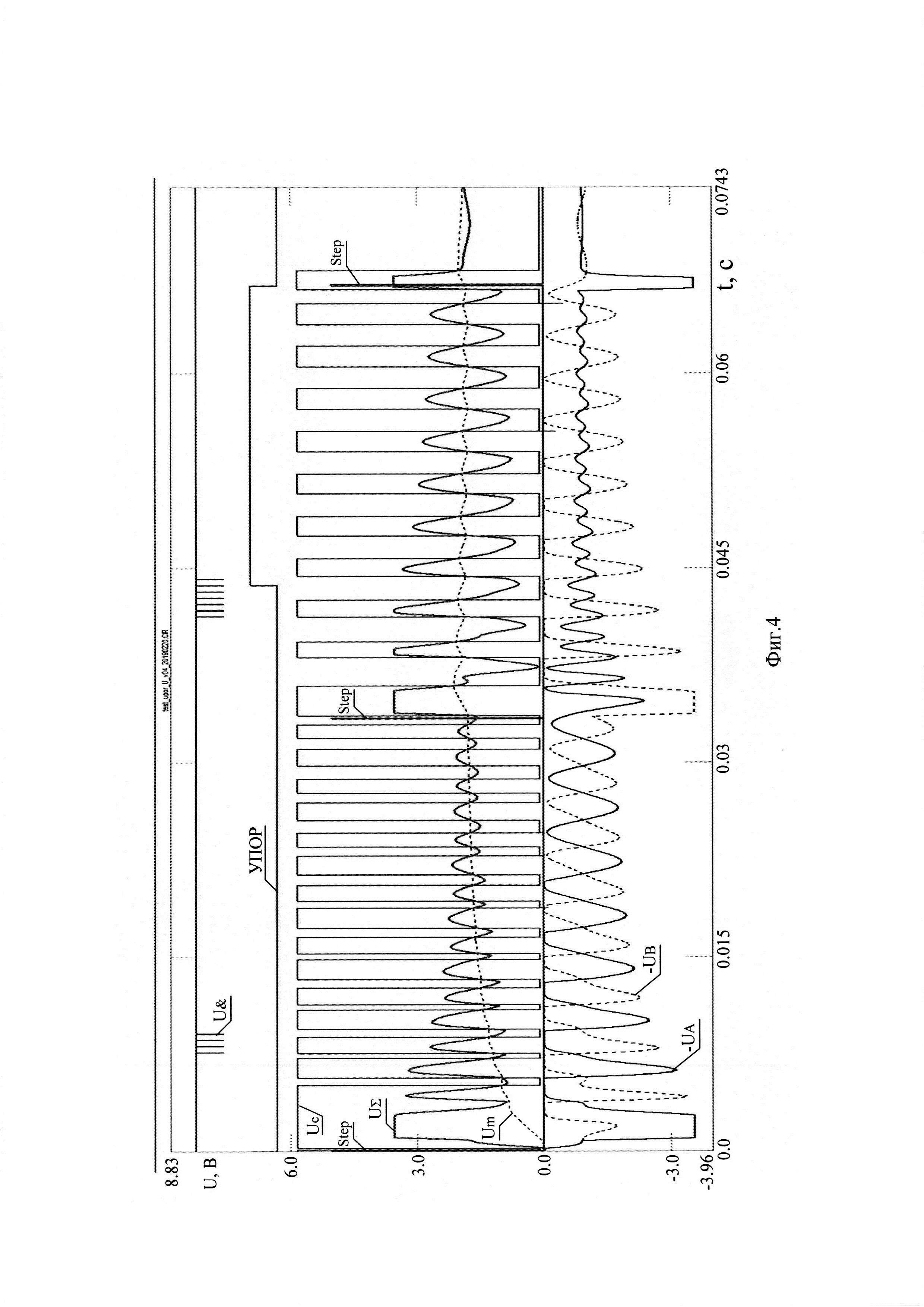
Предлагаемое техническое решение предназначено для определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем, работающим в полношаговом режиме с двумя одновременно включенными тобмотками. Способ основан на характерном изменении сигнала, пропорционального сумме действующих значений напряжений на обмотках ШД, при встрече ротора ШД с препятствием. Соответствующий процесс изменения суммы действующих значений напряжений на обмотках ШД UoбΣ, полученный экспериментально, приведен на фиг. 1. На этом же графике показаны процессы изменения тока обмоток 1a, 1b и процесс изменения углового положения ротора θ. Можно заметить, что после реверса тока каждой из обмоток ШД при совершении очередного шага наступает интервал времени, на котором происходят свободные колебания ротора привода со всеми присоединенными к нему элементами, сопровождающиеся пульсациями суммы действующих значений напряжений на обмотках ШД. Отметим, что последовательные шаги при движении ротора ШД в сторону механического упора должны выполняться с периодом, имеющим достаточную длительность, позволяющую совершать несколько полных свободных колебаний ротора. При касании ротора ШД механического упора на него начинает действовать нагрузка, вызывающая упругую деформацию, и ротор уже не может повернуться на полную величину шага (см. второй по счету шаг, показанный на фиг. 1). Одновременно на том же шаге, как хорошо видно на графике, происходит резкое увеличение периода пульсаций суммы действующих значений напряжений на обмотках ШД на отрезке времени, начинающемся сразу после завершения реверса тока в активной на текущем шаге обмотке ШД. Это явление послужило физической основой для создания предполагаемого изобретения.
Период пульсаций суммы действующих значений напряжений на обмотках ШД при беспрепятственном движении ротора ШД электропривода в сторону механического упора равен Тп1 (см. фиг. 1), а при возникновении упругой деформации становится равным Тп2. Период выполнения шагов для приведенного эксперимента был установлен Tstep, что обеспечивает совершение ротором ШД не менее пяти свободных колебаний после завершения реверса тока в активной на текущем шаге обмотке.
Решение задачи предполагаемого изобретения достигается тем, что после поступления управляющего сигнала на выполнение шага на участке свободных колебаний ротора шагового двигателя определяют период пульсаций суммы действующих значений напряжений на обмотках шагового двигателя ненагруженного электропривода. А при движении ротора в сторону механического упора измеряют величину периода этих пульсаций на каждом текущем шаге и, когда измеренная величина превысит заданное пороговое значение, формируют сигнал, являющийся признаком достижения электроприводом механического упора. При этом напряжение на каждом выводе каждой обмотки измеряют относительно отрицательного вывода источника питания драйвера.
Для обеспечения помехозащищенности способа измеряют величину третьего, начиная от момента поступления управляющего сигнала на выполнение текущего шага, периода пульсаций суммы действующих значений напряжений на обмотках шагового двигателя.
Для реализации предлагаемого способа определения момента достижения механического упора электроприводом с двухобмоточным ШД, работающим в полношаговом режиме, разработано устройство, в котором преобразователь и анализатор снабжены дополнительными входами, соединенными с соответствующим выходом (Step) контроллера шагового двигателя, а преобразователь содержит два блока формирования действующего значения напряжения обмотки шагового двигателя, сумматор, два фильтра нижних частот преобразователя, компаратор, временной селектор, генератор счетных импульсов и элемент «И», входы которого соединены с выходами генератора счетных импульсов и временного селектора. Входы временного селектора соединены с дополнительным входом преобразователя и выходом компаратора, входы которого соединены с выходами фильтров нижних частот преобразователя. Входы сумматора соединены с выходами блоков формирования действующих значений напряжений на каждой из обмоток шагового двигателя, а его выход - с входом первого фильтра нижних частот преобразователя, выход которого соединен с входом второго фильтра нижних частот преобразователя. Вводы блоков формирования действующих значений напряжений соединены с соответствующими выводами обмоток шагового двигателя и источника питания драйвера. Выход элемента «И» является выходом преобразователя, соединенным с входом анализатора, который содержит счетчик-делитель на 8 и D-триггер, прямой и инверсный выходы которого являются выходами анализатора. Вход сброса D-триггера соединен с дополнительным входом анализатора. Вход данных D-триггера соединен с источником высокого логического потенциала, а его тактовый вход - с выходом «6» счетчика-делителя на 8, тактовый вход которого является входом анализатора. При этом вход сброса счетчика-делителя на 8 соединен с дополнительным входом анализатора, а выход «7» счетчика-делителя на 8 соединен с его входом разрешения.
Каждый блок формирования действующего значения напряжения на обмотке шагового двигателя содержит три фильтра нижних частот и сумматор. Причем вводы первого и второго фильтров нижних частот соединены с выводами соответствующей обмотки шагового двигателя и отрицательным выводом источника питания драйвера, а их выходы - с входами сумматора. Выход сумматора соединен с входом третьего фильтра нижних частот, выход которого является выходом блока формирования действующего значения напряжения на обмотке.
Сущность предлагаемого технического решения поясняется чертежами.
Фиг. 1. Полученные экспериментально осциллограммы процессов изменения токов в обмотках ШД, суммы действующих значений напряжений на обмотках ШД и углового положения ротора при его движении в сторону механического упора.
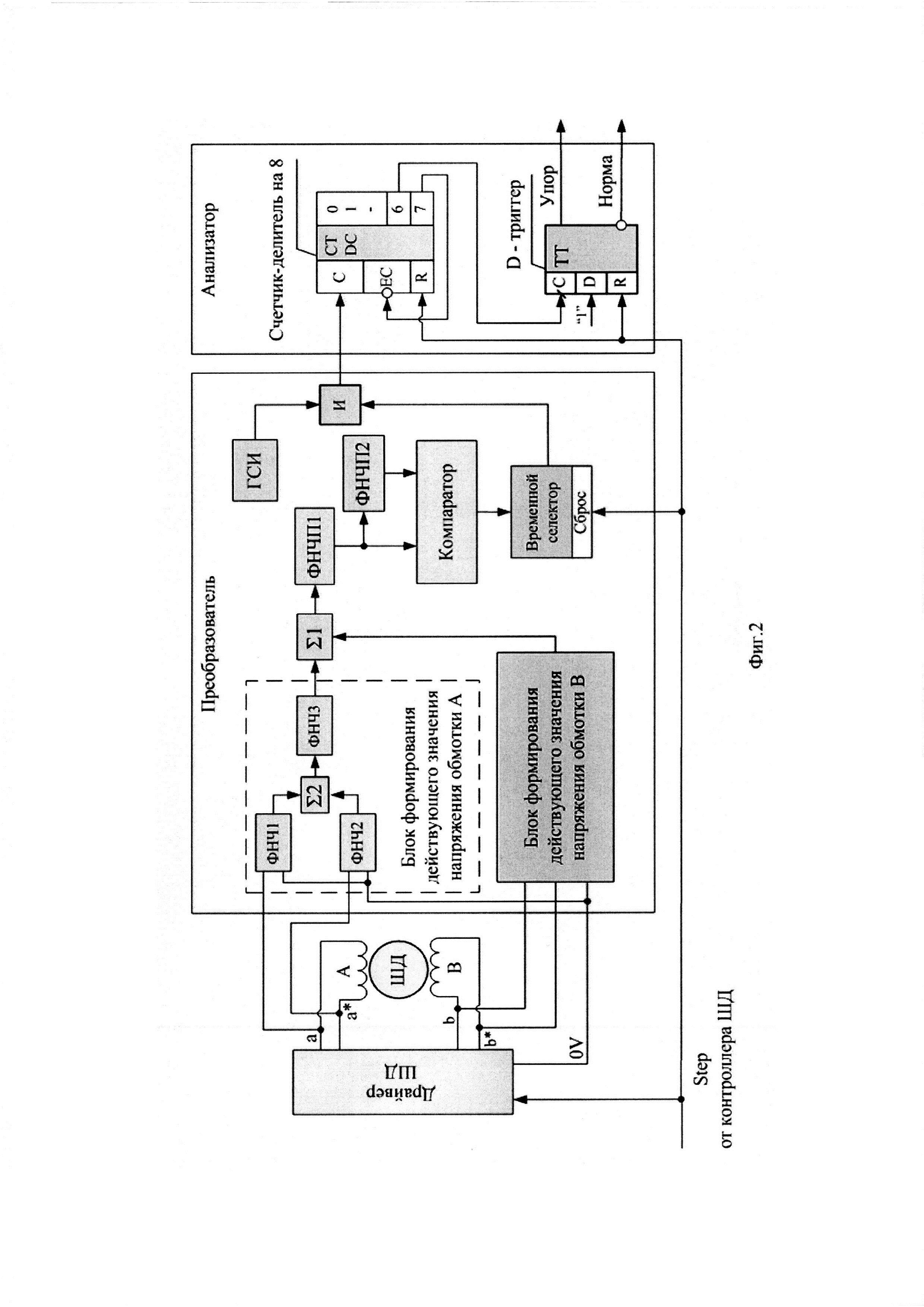
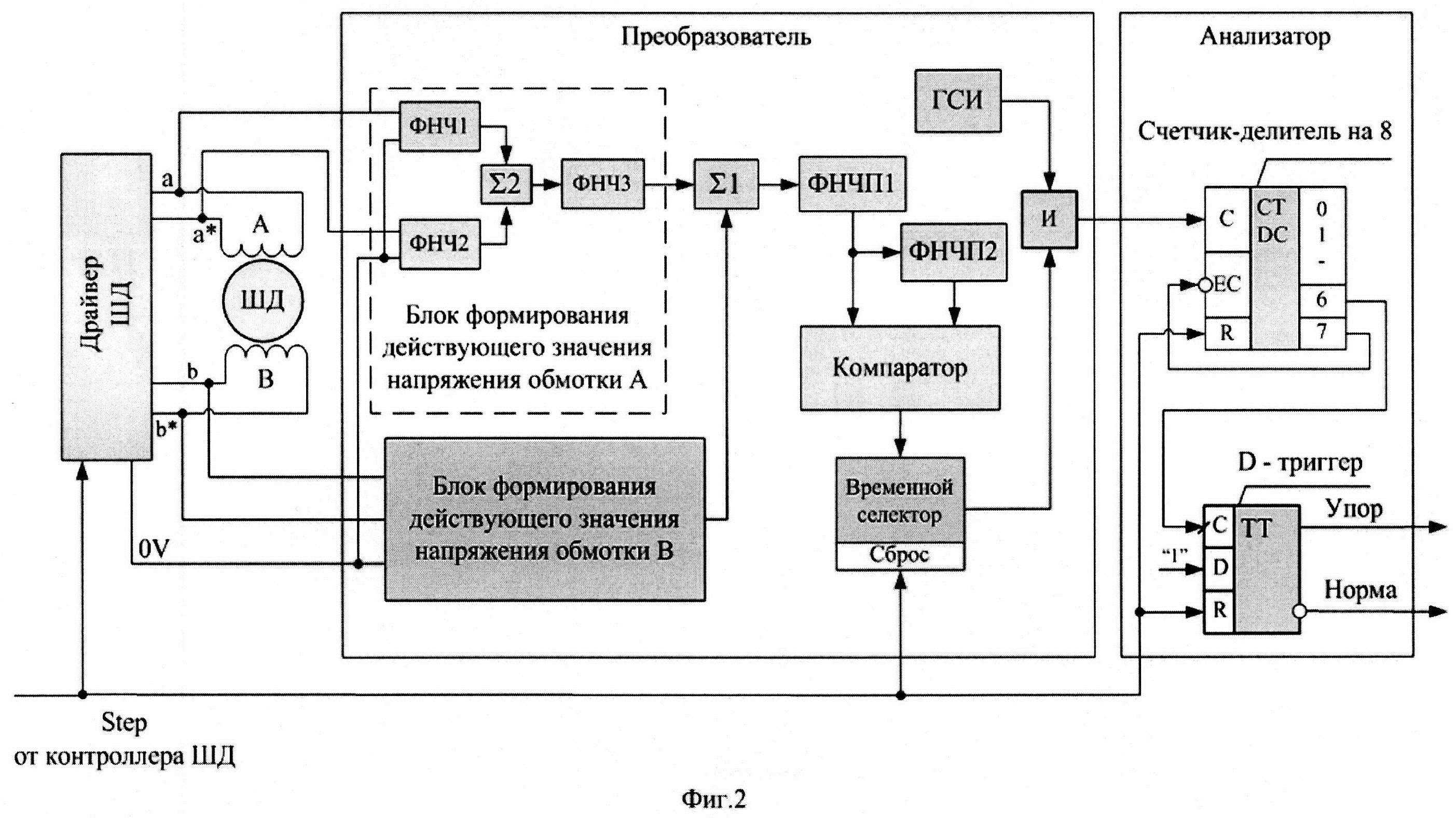
Фиг. 2. Функциональная схема устройства определения момента достижения механического упора электроприводом с двухобмоточным ШД, работающим в полношаговом режиме и схема его подключения к цепям драйвера и котроллера ШД.
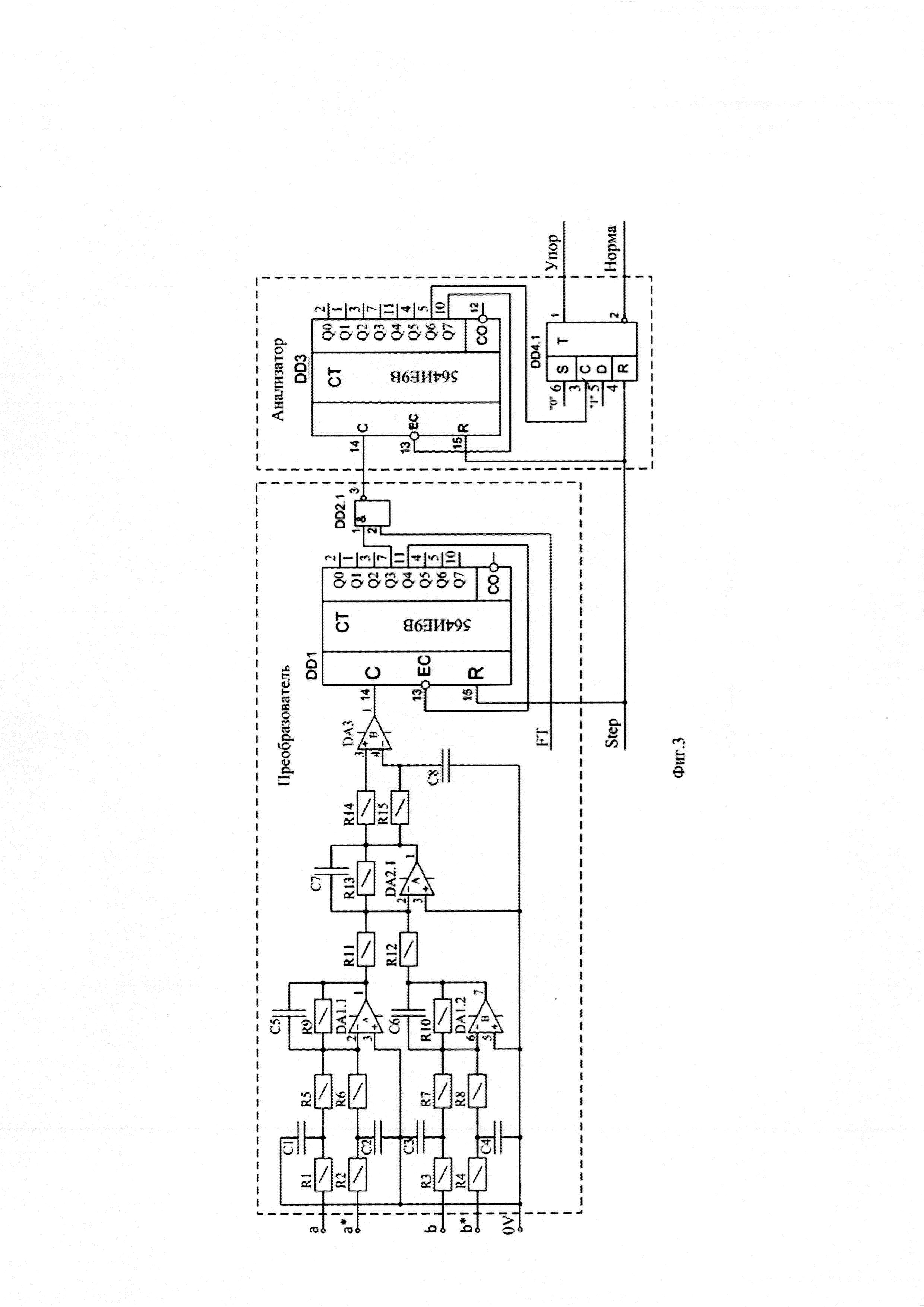
Фиг. 3. Электрическая принципиальная схема возможного исполнения устройства определения момента достижения механического упора электроприводом с двухобмоточным ШД, работающим в полношаговом режиме.
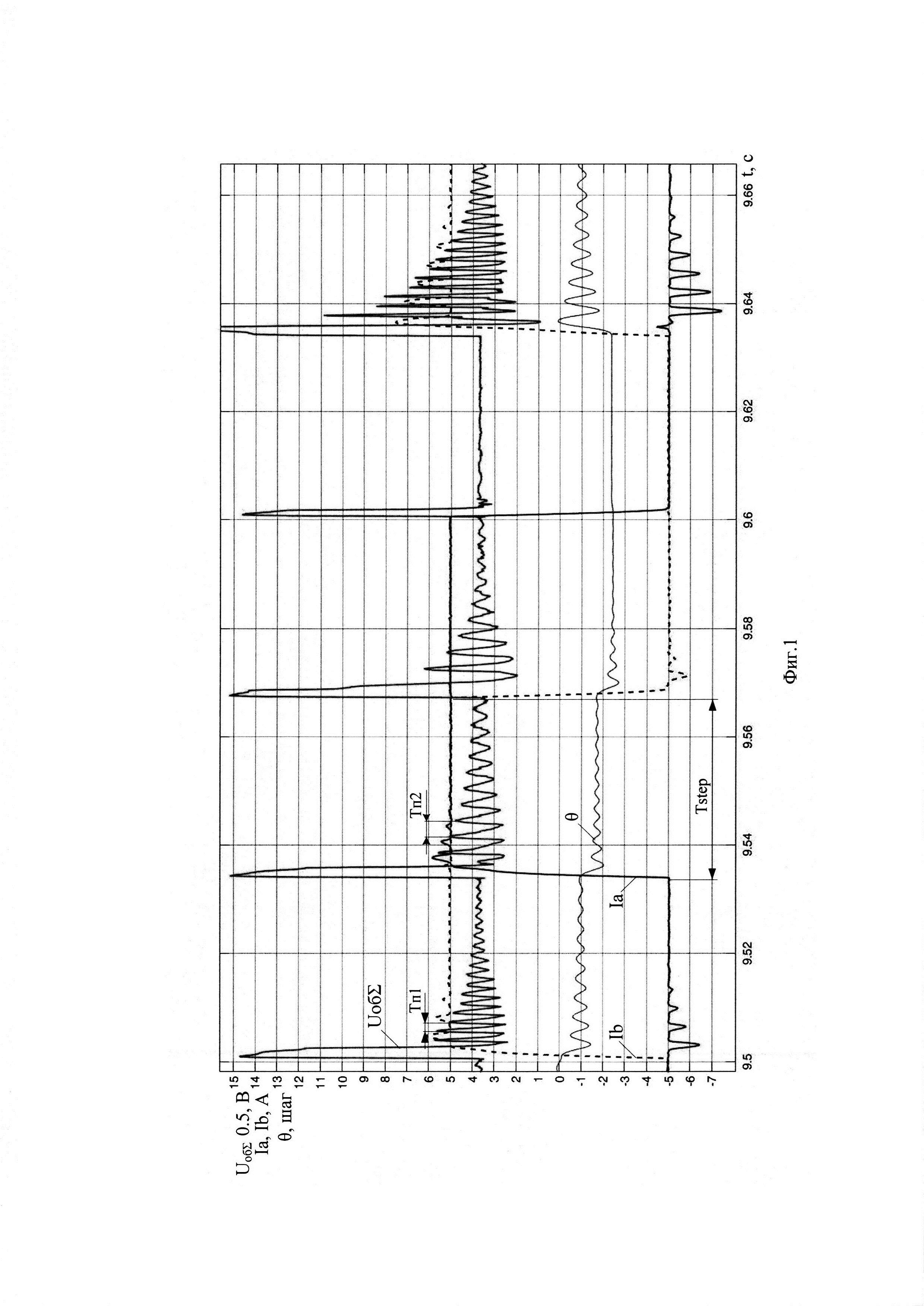
Фиг. 4. Результаты компьютерного моделирования работы приведенной на фиг. 3 электрической принципиальной схемы возможного исполнения устройства определения момента достижения механического упора электроприводом с двухобмоточным ШД, работающим в полношаговом режиме.
Предлагаемый способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем, работающим в полношаговом режиме, основан на определении синхронно с выполнением шага информационного параметра процессов изменения напряжения на обмотках шагового двигателя на текущем шаге при движении ротора в сторону механического упора. В качестве такого информационного параметра в предлагаемом техническом решении используется период пульсаций суммы действующих значений напряжений на обмотках шагового двигателя. Заданное пороговое значение, с которым сравнивается величина периода этих пульсаций на каждом текущем шаге, определяется исходя из периода пульсаций суммы действующих значений напряжений на обмотках шагового двигателя ненагруженного электропривода во время движения ротора ШД в сторону механического упора.
При этом значение периода пульсаций можно определять как отрезок времени между соседними моментами перехода в одинаковом направлении суммы действующих значений напряжений на обмотках шагового двигателя через уровень, соответствующий текущему значению его постоянной составляющей, или как отрезок времени между соседними максимумами суммы действующих значений напряжений на обмотках шагового двигателя (как это показано на графике, приведенном на фиг. 1).
Величину отрезка времени, равного периоду пульсаций суммы действующих значений напряжений на обмотках шагового двигателя, в частности, можно приближенно определять, подсчитывая помещающееся внутри него число квантующих импульсов с периодом повторения, величину которого выбирают в пять раз меньше величины периода пульсаций суммы действующих значений напряжений на обмотках шагового двигателя ненагруженного электропривода. Такой точности определения периода пульсаций вполне достаточно для решения задачи предполагаемого изобретения, так как измеряемый период пульсаций при достижении механического упора увеличивается почти вдвое (для случая, приведенного на фиг. 1, Тп2=1.823 Тп1).
Если значение периода пульсаций оценивать как отрезок времени между соседними моментами перехода в одинаковом направлении суммы действующих значений напряжений на обмотках шагового двигателя через уровень, соответствующий текущему значению ее постоянной составляющей, то текущее значение этой постоянной составляющей можно формировать как сигнал, полученный после обработки этой суммы действующих значений напряжений фильтром нижних частот с постоянной времени в 6…8 раз превышающей величину периода ее пульсаций, измеренного для ненагруженного электропривода. Ниже будут приведены результаты компьютерного моделирования, подтверждающие работоспособность и достаточную точность данного технического решения при решении задачи предполагаемого изобретения.
Для реализации предлагаемого способа можно предложить устройства, реализуемые на дискретных элементах, с использованием ПЛИС (программируемых логических интегральных схем), БМК (базовых матричных кристаллах) или на программно-аппаратных средствах микроконтроллера.
Предлагаемое здесь устройство, реализующее заявляемый способ определения момента достижения механического упора электроприводом с двухобмоточным шаговым двигателем, выполнено на дискретных элементах. Оно связано с контроллером ШД, его драйвером и обмотками и содержит (см. функциональную схему на фиг. 2) последовательно соединенные преобразователь с пятью вводами, соединенными с соответствующими выводами обмоток шагового двигателя и источника питания драйвера, и анализатор. Преобразователь и анализатор снабжены дополнительными входами, соединенными с соответствующим выходом контроллера шагового двигателя, с которого подаются стандартные управляющие сигналы Step, вызывающие выполнение шагов.
Преобразователь содержит два блока формирования действующего значения напряжения обмотки шагового двигателя, сумматор (Σ1), два фильтра нижних частот преобразователя (ФНЧП1 и ФНЧП2), компаратор, временной селектор, генератор счетных импульсов (ГСИ) и элемент «И», входы которого соединены с выходами ГСИ и временного селектора, входы которого соединены с дополнительным входом преобразователя и выходом компаратора. Входы компаратора соединены с выходами ФНЧП1 и ФНЧП2. Входы сумматора Σ1 соединены с выходами блоков формирования действующих значений напряжений на каждой из обмоток А и В шагового двигателя, а его выход - с входом первого фильтра нижних частот преобразователя ФНЧП1. Выход ФНЧП1 соединен с входом второго фильтра нижних частот преобразователя ФНЧП2. Вводы блоков формирования действующих значений напряжений обмоток А и В соединены с соответствующими выводами а, а* и b, b* обмоток ШД и источника питания драйвера 0V. Выход элемента «И» является выходом преобразователя, соединенным с входом анализатора.
Анализатор содержит счетчик-делитель на 8 и D-триггер, прямой и инверсный выходы которого являются выходами анализатора. Вход сброса D-триггера соединен с дополнительным входом анализатора. Вход данных D-триггера соединен с источником высокого логического потенциала, а его тактовый вход - с выходом «6» счетчика-делителя на 8, тактовый вход которого является входом анализатора. Вход сброса счетчика-делителя на 8 соединен с дополнительным входом анализатора, а выход «7» счетчика-делителя на 8 соединен с его входом разрешения.
Каждый блок формирования действующего значения напряжения обмотки шагового двигателя содержит три фильтра нижних частот (ФНЧ1, ФНЧ2 и ФНЧ3) и сумматор (Σ2). Вводы ФНЧ1 и ФНЧ2 соединены с выводами соответствующей обмотки шагового двигателя (А или В) и отрицательным выводом источника питания драйвера 0V, а их выходы - с входами сумматора Σ2. Выход сумматора Σ2 соединен с входом ФНЧ3, выход которого является выходом блока формирования действующего значения напряжения на обмотке.
Работает устройство следующим образом. По приходу сигнала Step временной селектор, счетчик-делитель на 8 и D-триггер устанавливаются в начальное состояние. Сигналы с выводов драйвера (или обмоток) a, a*, b, b*, представляющие собой модулированные по скважности напряжения, поступают на входы ФНЧ1 и ФНЧ2, включенных относительно минусового вывода источника питания драйвера 0V. На выходах этих ФНЧ формируются действующие значения напряжений Ua, Ua*, Ub и Ub* на указанных выводах. Далее сигналы попарно суммируются Ua с Ua* и Ub с Ub* соответственно на сумматорах Σ2 соответствующих блоков формирования действующего значения напряжения и поступают на входы последующих ФНЧ3, обеспечивающих снижение пульсаций выходного сигнала, вызванных работой модуляторов регуляторов тока драйвера. Сглаженные сигналы с выходов ФНЧ3, представляющие собой действующие значения напряжений на обмотках А и В, поступают на входы сумматора Σ1, на выходе которого формируется сумма действующих значений напряжений на обмотках ШД. Этот сигнал поступает на ФНЧП1, где он фильтруется. Сигнал с выхода ФНЧП1 поступает далее на вход компаратора, где он сравнивается со значением его постоянной составляющей, формирующейся на выходе ФНЧП2.
Для выделения постоянной составляющей суммы действующих значений напряжений на обмотках ШД, величина постоянной времени ФНЧП2 выбирается значительно больше периода свободных колебаний ротора ШД. На выходе компаратора формируется колебание прямоугольной формы, период которого соответствует периоду пульсаций суммы действующих значений напряжений на обмотках ШД. Для принятия решения о достижении ротором ШД механического упора определяется длительность периода третьего колебания. Выбор именно третьего колебания для определения длительности периода обеспечивается временным селектором. Такой выбор обусловлен тем, что в сигнале с выхода компаратора первое колебание с амплитудой, равной напряжению источника питания, не содержит информации о состоянии ШД. Второе колебание в некоторых случаях может быть вызвано возникающим паразитным сигналом, появление которого зависит от фазы колебаний ротора ШД на момент начала выполнения шага (поступления сигнала Step). На выходе временного селектора в течение длительности третьего колебания формируется логическая единица, разрешающая прохождение счетных импульсов от ГСИ через элемент И на вход анализатора, т.е. на счетный вход счетчика-делителя на 8. С приходом на вход счетчика шестого импульса на его выходе «6» формируется импульс, передний фронт которого, поступая на тактовый вход D-триггера, устанавливает логическую 1 на его выходе УПОР. Это событие свидетельствует о достижении ротором ШД механического упора.
Электрическая принципиальная схема возможного исполнения предлагаемого устройства приведена на фиг. 3. Части схемы, реализующие блоки преобразователя и анализатора, очерчены штриховыми линиями.
Питание аналоговой части устройства осуществляется от двухполярного источника питания ±5 В. Цифровая часть использует только источник +5 В. Цепи питания на схеме не показаны. Входные цепи преобразователя a, a*, b, b* подключены к одноименным выводам обмоток А и В ШД и представляют собой ФНЧ1 и ФНЧ2. Для выводов обмотки А они выполнены на R1C1 и R2C2, а для выводов обмотки В - на R3C3 и R4C4 соответственно. Выходные сигналы с выходов этих ФНЧ суммируются на инвертирующем входе операционного усилителя (ОУ) DA1.1 (для обмотки А), на элементах которого С5 и R9 выполнен ФНЧ3. И элементы DA1.2 и С6 и R10 для обмотки В соответственно. Учитывая, что вне зависимости от направления тока в обмотке, один из выводов драйвера через открытый ключ будет соединен с отрицательным выводом источника питания драйвера имеющим потенциал 0V, то с точностью, достаточной для предлагаемого способа, после суммирования с инвертированием, на выходе ОУ DA1.1 будет формироваться инверсное действующее значение напряжения на обмотке А. Аналогично на выходе ОУ DA1.2 будет формироваться инверсное действующее значение напряжения на обмотке В.
Суммирование, инвертирование и окончательное сглаживание этих значений напряжений выполняется на ОУ DA2.1, который выполняет роль соединенных последовательно сумматора Σ1 и ФНЧП1. На выходе ОУ DA2.1 формируется сигнал, пропорциональный сумме действующих значений напряжений на обмотках А и В ШД.
Сигнал с выхода ОУ DA2.1 поступает на неинвертирующий вход компаратора, выполненного на микросхеме DA3, и на вход фильтра нижних частот R15, С8 (ФНЧП2), выделяющего постоянную составляющую. Сигнал, соответствующий постоянной составляющей суммы действующих значений напряжений на обмотках А и В, подается на инвертирующий вход компаратора DA3.
С выхода компаратора сигнал, представляющий собой колебания прямоугольной формы с периодом, соответствующим периоду пульсаций суммы действующих значений напряжений на обмотках А и В, поступает на тактовый вход микросхемы DD1, на которой построен временной селектор. Он выполнен на счетчике-делителе на 8 (в качестве которого используется микросхема 564ИЕ9 В [7]). Переключение выходов микросхемы DD1 происходит при поступлении на ее тактовый вход переднего фронта каждого прямоугольного колебания с выхода компаратора DA3. Таким образом, по приходу третьего по счету колебания от момента поступления сигнала Step на вход R микросхемы DD1, на ее выходе Q3 установится логическая единица, которая сбросится в 0 при приходе переднего фронта четвертого колебания. При этом логическая единица установится на выходе Q4 микросхемы DD1, соединенного с входом разрешения ЕС. На этом остановится дальнейший счет колебаний до следующего поступления сигнала Step на вход R.
Логическая единица с выхода Q3 микросхемы DD1 поступает на первый вход элемента И, выполненного на микросхеме DD2.1, на другой вход которого поступают тактовые импульсы FT с выхода генератора счетных импульсов (на схеме не показан, может быть выполнен, например, по схеме, приведенной на рис. 5.33 в [8]). На выход микросхемы DD2.1 поступит такое количество счетных импульсов, которое укладывается внутри периода суммы действующих значений напряжений на обмотках А и В.
С выхода DD2.1 счетные импульсы поступают на счетный вход микросхемы DD3, являющейся счетчиком-делителем на 8 анализатора. При появлении на входе микросхемы DD3 шестого импульса на ее выходе Q6 появляется импульс, передний фронт которого, поступая на тактовый вход D-триггера (DD4.1), устанавливает на выходе «Упор» логическую единицу, свидетельствующую о достижении приводом механического упора. Это состояние выхода D-триггера будет сохраняться до прихода на его вход R сигнала Step, по которому начнется новый цикл работы анализатора.
Отметим, что коэффициент усиления ОУ DA1 и DA2.1 выбирается таким, чтобы обеспечить ограничение выходного сигнала DA2.1 на уровне, превышающем на 10% амплитуду напряжения свободных колебаний на его выходе. Такое решение позволяет ограничить равную напряжению питания ШД амплитуду импульса напряжения, возникающего при изменении направления тока в обмотке ШД.
В качестве DA1, DA2 может быть использован ОУ AD8566ARMZ-R2 [9]. Частота среза ФНЧ(1-3) выбирается в 3 раза выше удвоенной частоты свободных колебаний ротора ШД. Для эффективного выделения постоянной составляющей частота среза ФНЧП2 выбирается в 8-10 раз ниже частоты свободных колебаний ротора ШД. При величине мгновенного значения этого сигнала больше значения постоянной составляющей на периоде, на выходе компаратора будет логическая единица, и 0 - в противном случае. Компаратор может быть выполнен на микросхеме MIC7211 [10]. Счетчик-делитель на 8 DD3 выполнен на микросхеме 564ИЕ9В [7]. В качестве элемента «И» (DD2.1) применена микросхема 567ЛА7[11]. В качестве D-триггера использована микросхема 564ТМ2[12]. Как уже отмечалось, временной селектор построен на счетчике-делителе на 8 - микросхеме 564ИЕ9В.
Для подтверждения работоспособности заявляемого технического решения было выполнено компьютерное моделирование работы электрической принципиальной схемы возможного исполнения устройства, реализующего предлагаемый способ. При этом использовался программный пакет Micro-Cap (Microcomputer Circuit Analysis Program) для компьютерного моделирования аналоговых и цифровых электронных устройств [13, 14]. Компьютерное моделирование работы электрической принципиальной схемы устройства проводилось путем подачи на ее входы экспериментальных значений управляющего сигнала Step и электрических потенциалов, замеренных на выводах обмоток ШД при движении ротора ШД электропривода в сторону механического упора.
Полученные при компьютерном моделировании переходные процессы изменения электрических потенциалов в характерных точках электрической принципиальной схемы устройства при движении ротора ШД электропривода в сторону механического упора приведены на фиг. 4.
На осциллограммах показаны следующие основные сигналы, отражающие работу устройства:
- действующее значение напряжения на обмотке А - UA, которое формируется на выходе ФНЧ3 блока формирования действующего значения обмотки А (выход операционного усилителя DA1.1 на электрической принципиальной схеме фиг. 3);
- действующее значение напряжения на обмотке В - UB, которое формируется на выходе ФНЧ3 блока формирования действующего значения обмотки В (выход операционного усилителя DA1.2 на электрической принципиальной схеме фиг. 3);
- сигнал UΣ, соответствующий сумме действующих значений напряжений на обмотках шагового двигателя, который формируется на выходе ФНЧП1 преобразователя (выход операционного усилителя DA2.1 на электрической принципиальной схеме фиг. 3);
- сигнал Um, являющийся оценкой текущего значения постоянной составляющей суммы действующих значений напряжений на обмотках шагового двигателя, который формируется на выходе ФНЧП2 преобразователя (вход «4» компаратора DA3 на электрической принципиальной схеме фиг. 3);
- сигнал Uc, являющийся выходным сигналом компаратора преобразователя (выход компаратора DA3 на электрической принципиальной схеме фиг. 3);
- управляющий сигнал Step, поступающий от контроллера шагового двигателя на драйвер ШД и дополнительные входы преобразователя и анализатора (выход компаратора DA3 на электрической принципиальной схеме фиг. 3);
- сигнал U&, являющийся выходным сигналом элемента «И» и, соответственно, преобразователя (выход микросхемы DD2.1 на электрической принципиальной схеме фиг. 3), который поступает на вход анализатора (и, соответственно, на тактовый вход счетчика-делителя на 8 - вход «С» микросхемы DD3 на электрической принципиальной схеме фиг. 3);
- сигнал УПОР, который формируется на выходе устройства и является выходным сигналом D-триггера (выход «1» D-триггера DD4.1 на электрической принципиальной схеме фиг. 3). Когда этот сигнал имеет высокий логический потенциал (логическая единица), это свидетельствует о достижении электроприводом механического упора.
Анализ представленных на фиг. 4 осциллограмм показывает, что счетные импульсы с выхода генератора счетных импульсов поступают на вход счетчика-делителя на 8 анализатора только в течение третьего периода пульсаций суммы действующих значений напряжений на обмотках шагового двигателя на текущем шаге управления. Сигнал, соответствующий логической единице, на соответствующем выходе D-триггера формируется на текущем шаге управления, если количество счетных импульсов, поступивших на тактовый вход счетчика-делителя на 8, будет больше пяти (пороговое значение). На первом, показанном на фиг. 4, шаге на тактовый вход счетчика-делителя на 8 поступило только четыре импульса. Такой алгоритм работы устройства полностью отражает полученные в результате компьютерного моделирования осциллограммы, что подтверждает работоспособность и правильное функционирование предложенной реализации заявленного технического решения.
Таким образом, использование предполагаемого изобретения позволяет существенно упростить процесс получения и преобразования информации для принятия решения о достижении электроприводом механического упора. Это, соответственно, позволяет упростить устройство, реализующее способ определения момента достижения электроприводом механического упора, и приводит к снижению аппаратных и программных затрат. Кроме того, достигается повышение помехозащищенности за счет использования информационного параметра, который резко изменяет свое значение при касании ротором ШД механического упора. Расширение области применения предлагаемого технического решения достигается возможностью его включения в отработанную и эксплуатирующуюся систему управления приводом без доработки драйвера ШД.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US 7,239,108 В2 METHOD FOR STEPPER MOTOR POSITION REFERENCING, Date of Patent: Jul.3, 2007.
2. METHOD AND ELECTRONIC CIRCUIT FOR MOTOR STALL DETECTION, US 2016/0013743 Al, Pub. Date: Jan. 14, 2016.
3. EP 3 261 245 A1, METHOD AND ELECTRONIC CIRCUIT FOR STALL DETECTION, Date of publication: 27.12.2017 Bulletin 2017/52.
4. US 7,880,423 B2, METHOD AND APPARATUS FOR STEPPER MOTOR STALL DETECTION, Date of Patent: Feb. 1, 2011.
5. US 9,013,133 B2 METHOD AND APPARATUS FOR STEPPER MOTOR STALL, DETECTION, Date of Patent: Apr. 21, 2015.
6. Емельянов A.B., Шилин A.H. Шаговые двигатели: учебное пособие. Волг. ГТУ. Волгоград, 2005. ISBN №5-230-04591-4.
7. Технические условия бК0.347.064 ТУ8.
8. Хоровиц П., Хилл У. Искусство схемотехники: Пер. с англ. - Изд. 2-е. - М.: Издательство БИНОМ. -2014. - 704 с., ил.
9. https://www.analog.com/media/en/technical-documentation/data-sheets/ AD8565_8566_8567.pdf.
10. http://wwl.microchipxom/downloads/en/DeviceDoc/mic7211.pdf
11. Технические условия АЕЯР.431200.610-01ТУ
12. Технические условия бК0.347.064 ТУ32
13. www.spectrum-soft.com
14. Амелина М.А., Амелин С.А. Программа схемотехнического моделирования Micro-Cap. Версии 9, 10. - Смоленск, Смоленский филиал НИУ МЭИ, 2013. - 618 с., ил.
Приборная панель космического аппарата
Кассетный боеприпас
Артиллерийский осколочно-фугасный снаряд
Сопло летательного аппарата
Кран шаровой
Тренога
Солнечная батарея
Силовой блок двигательной установки ракеты-носителя
Логопериодическая антенна
Клапан
Способ выплавки стали, легированной азотом
Способ формирования аудита персональной биометрической информации
Способ измельчения спеченных твердых сплавов
Премикс для кур-несушек второй фазы продуктивности
Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу usb и устройство для его осуществления
Магнитная клавиатура
Способ стабилизации уровня тока в обмотке двухфазного биполярного шагового двигателя в полношаговом режиме и драйвер для его осуществления
Способ определения момента достижения механического упора электроприводом с биполярным шаговым двигателем и устройство для его осуществления
Способ определения положения якоря электромагнита и устройство для его осуществления
Способ мониторинга температуры обмотки электромагнита и устройство для его осуществления

