Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Изобретение относится к гироскопическому приборостроению и может быть использовано в наземных транспортных средствах (ТС) для непрерывного определения угловой ориентации (курса, крена, тангажа) движущегося ТС.
Из уровня техники известны следующие способы определения угловой ориентации движущегося транспортного средства.
Способ выработки навигационных параметров и вертикали места, заключающийся в формировании сигналов, пропорциональных соответствующим проекциям вектора кажущегося ускорения, измеренных при помощи акселерометров, установленных по каждой оси приборного трехгранника, связанного с гироплатформой, формировании сигналов управления гироплатформой, удерживании гироплатформы в плоскости горизонта и выработке вертикали места и навигационных параметров на основе сигналов управления, пропорциональных соответствующим проекциям вектора угловой скорости приборного трехгранника и с учетом оценки их погрешностей, путем сравнения значений одноименных выходных параметров различных контуров интегрирования кинематических уравнений приборного трехгранника, выработанных на основе сигналов, пропорциональных сумме соответствующих проекций вектора угловой скорости приборного трехгранника и соответствующих дополнительных сигналов, величины и закон изменения которых предварительно задаются или устанавливаются с помощью устройства выработки навигационных параметров, благодаря чему схемными средствами обеспечивается уменьшение влияния погрешностей инерциальной системы на выходные навигационные параметры и вертикаль места. [1]
Способ инерциальной навигации, включающий измерение сигналов с акселерометров, формирование отсчетной системы координат, вычисление выходных навигационных параметров системы, отличающийся тем, что вычисляют выходные параметры навигационной системы по эталонной модели, вычисляют соответствующие им входные сигналы с акселерометров для эталонной модели, в которой разворачивают отсчетную систему координат на фиксированные углы относительно отсчетной системы координат навигационной системы, вычисляют сигналы с акселерометров, получаемые путем перепроектирования сигналов с акселерометров навигационной системы на развернутую на те же фиксированные углы систему координат эталонной модели, затем по значениям вычисленных сигналов с акселерометров для эталонной модели и сигналов с акселерометров, полученных путем перепроектирования, определяют угловой дрейф отсчетной системы координат навигационной системы и осуществляют коррекцию углового положения отсчетной системы координат навигационной системы. [2]
Эти способы имеют 2 основных недостатка, которые не позволяют обеспечить заданную точность:
1. В способах определяется влияние различных погрешностей на ошибки навигационной системы и вводится компенсация, основываясь на их неизменности. Реальная аппаратура имеет нестабильные погрешности и учет их изменения в процессе движения ТС является основной задачей разработчика автономной навигационной системы или систем выработки угловой ориентации ТС.
2. Реальная аппаратура формирует выходную информацию с большим уровнем помех из-за наличия вибрации и ударов в процессе движения ТС. Непрерывное выполнение вычислений по предложенным способам в этих условиях - невозможно.
Наиболее близким к предлагаемому техническому решению является способ, изложенный в [3]. Суть способа состоит в формировании на основе общих уравнений ошибок, упрощенных моделей, описывающих ошибки инерциальной навигационной системы (ИНС), справедливых для различных условий эксплуатации (движение с небольшими постоянными скоростями υ≤500 км/ч относительно Земли, в течение 1 часа, 2-2,5 часов, а также ускоренного движения объекта). Определении погрешностей навигационных параметров ИНС, на основе использования информации, поступающей от внешних по отношению к ней датчиков, и их оценка волновыми алгоритмами оценивания и алгоритмами предельного перехода, и алгоритмической компенсации данных погрешностей ИНС.
Применение вышеописанных способов позволяет решать, как прямую задачу определения навигационных параметров, так и обратную - определения угловой ориентации транспортного средства, с погрешностями ИНС. Данные способы весьма трудоемки, имеют весомые погрешности, и достоверные значения определяются с большим запаздыванием, что не соответствует современным требованиям к системе определения угловой ориентации ТС, которые предполагают вычисление этих параметров в процессе движения непрерывно и с запаздыванием не более 0,06 сек. Коррекция погрешностей навигационных параметров ИНС, изложенная в [3] проводится не в реальном масштабе времени.
Задачей предлагаемого изобретения является разработка способа определения угловой ориентации ТС с меньшими погрешностями в реальном масштабе времени с использованием внешней информации текущих значений географических координат широты и долготы.
Поставленная задача решается тем, что предложен способ определения угловой ориентации ТС, включающий начальную выставку стабилизированной платформы (СП) трехосного гиростабилизатора (ТГС) в плоскость горизонта и ориентацию по странам света, управление СП сигналами, пропорциональными угловой скорости вращения Земли и интегрированной информации с акселерометров. Во время стоянки на начальном участке управления СП проводится настройка системы, в ходе которой определяются константы погрешностей начальной угловой выставки приборной системы координат в опорной системе координат и погрешности угловых скоростей. В процессе управления СП в каждом цикле цифровым вычислительным комплексом (ЦВК), с использованием внешней информации текущих значений географических координат транспортного средства, проводится расчет поправочных значений угловых отклонений приборной системы координат от опорной системы координат с учетом нестабильности погрешностей всех элементов схемы управления СП в реальном масштабе времени. Полученные в каждом цикле ЦВК значения поправок используются для компенсации погрешностей инерциальной навигационной системы и точного определения угловой ориентации транспортного средства по тангажу, рысканию и курсу с учетом информации с датчиков углов.
Погрешности ИНС, реализованной приборным трехгранником гироплатформы, ориентированной по странам света и местной вертикали, в условиях стабильности собственных дрейфов гироблоков и использовании внешней информации текущих значений широты и долготы движущегося ТС, компенсируются вырабатываемыми поправками, с учетом нестабильности погрешностей всех элементов схемы управления гироплатформы в реальном масштабе времени, которые в виду особенности управления, в режиме обратной связи по информации сигналов с акселерометров [4], приводятся к погрешностям углов по трем осям, а значит и к изменению величины проекции ускорения силы тяжести(g) на измерительные оси акселерометров.
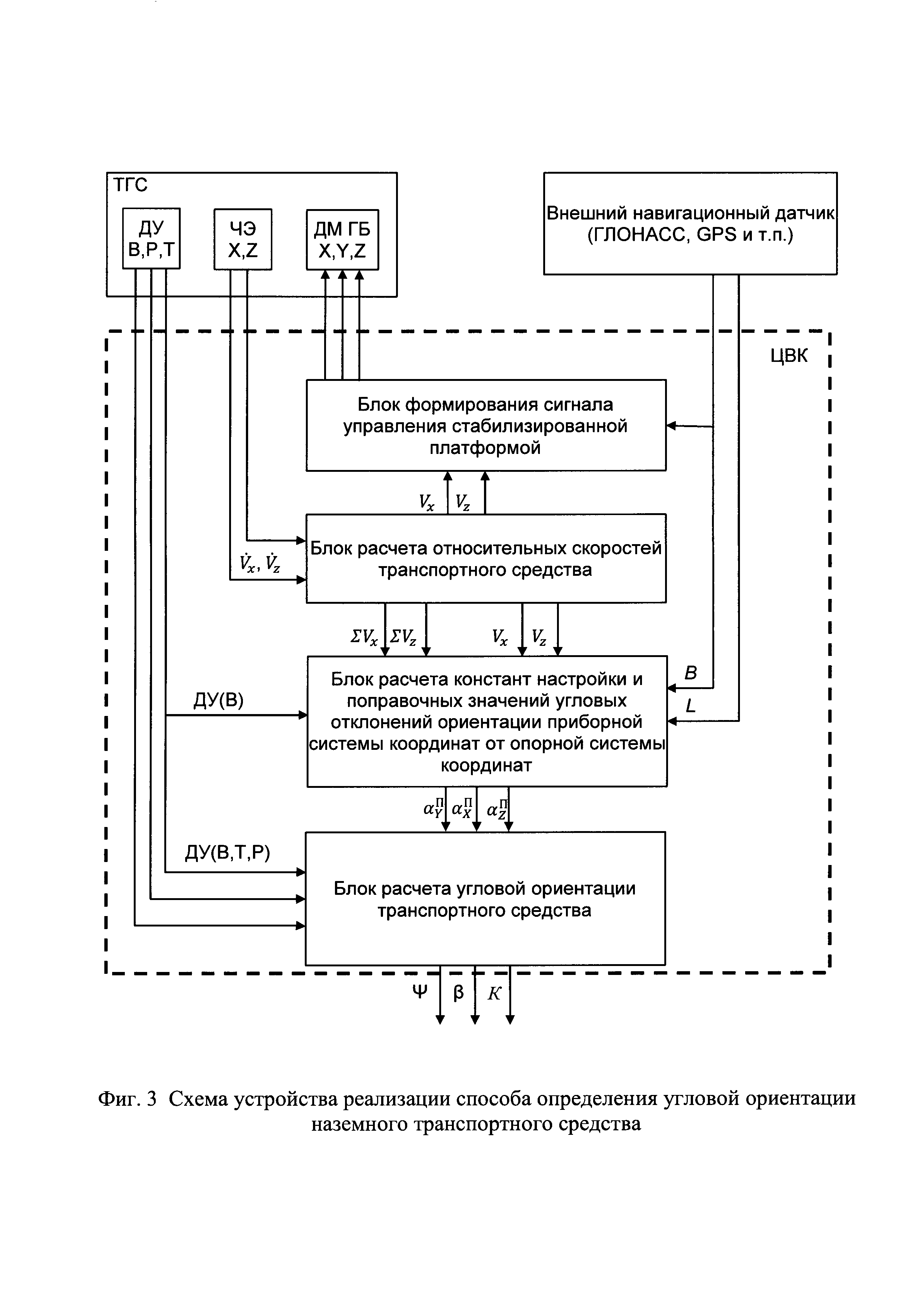
На фиг. 1 приведена структурная схема ТГС, для которой применяется предлагаемый способ, где:
XПYПZП - приборная система координат (ПСК), связанная с СП;
XКYКZК - система координат, связанная с корпусом прибора и транспортным средством, ввиду жесткой связи прибора и ТС;
В, Р, Т - оси вращения, рыскания и тангажа, проходящие через рамы карданова подвеса;
ГБ X, ГБ Y, ГБ Z - двухстепенные поплавковые интегрирующие гироскопы, расположенные по осям ХП, YП и ZП соответственно;
X, Z - акселерометры, расположенные по осям ХП и ZП соответственно;
ДК В, ДК Р, ДК Т - датчики команд, расположенные по осям В, Р и Т карданова подвеса соответственно;
ДУ В, ДУ Р, ДУ Т - датчики углов, расположенные по осям В, Р и Т соответственно.
ТГС содержит СП, расположенную в трехосном кардановом подвесе, с установленными на каждой из его осей датчиками углов (ДУ) и датчиками команд (ДК). На СП установлены два акселерометра и три двухстепенных поплавковых интегрирующих гироскопа, которые образуют правую прямоугольную систему координат параллельную осям ПСК. Гироскопы на осях прецессии имеют датчики момента (ДМ) и датчики углов прецессии (ДУП), входящие в систему стабилизации ТГС и систему приведения. Формирование сигнала управления СП реализуется ЦВК.
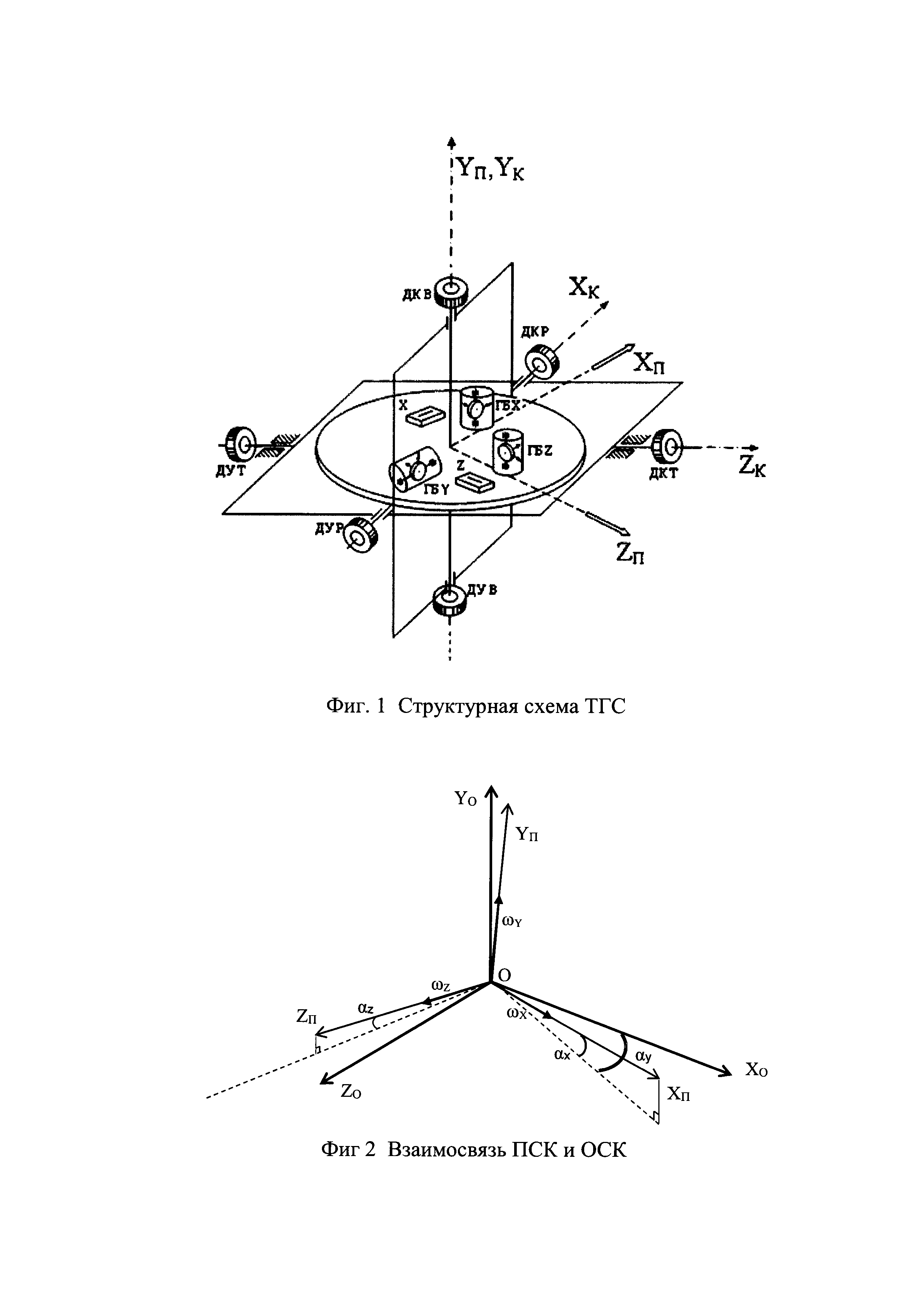
На фиг. 2 показана взаимосвязь ПСК (XПYПZП) и опорной системы координат (ОСК) (XOYOZO) полуаналитической ИНС, где:
XO - горизонтальная ось ОСК, направленная на Север;
YO - ось направленная по местной вертикали;
ZO - дополняет систему координат до правой;
ωX, ωY, ωZ - проекции угловой скорости СП относительно осей ХП, YП, ZП;
αХ, αY, αZ - углы рассогласования ПСК и ОСК по осям X, Y, Z.
На фиг. 3 приведена схема устройства реализации способа определения угловой ориентации наземного транспортного средства, которое включает в себя ТГС (ДУ В, ДУ Р, ДУ Т, ДМ ГБ X, ДМ ГБ Y, ДМ ГБ Z, акселерометры X и Y), внешний навигационный датчик (ГЛОНАСС, GPS и т.п.) и ЦВК. ЦВК содержит блок формирования сигнала управления стабилизированной платформой, блок расчета относительных скоростей транспортного средства, блок расчета констант настройки и поправочных значений угловых отклонений ориентации приборной системы координат от опорной системы координат и блок расчета угловой ориентации транспортного средства. β, Ψ, K - это углы отклонения системы координат связанной с корпусом прибора от ОСК по тангажу, рысканью и курсу соответственно, и идентичны углам отклонения ТС от ОСК, ввиду жесткой связи прибора и ТС.
Управление СП, выставленной в плоскость горизонта и ориентированной по странам света, для сохранения положения ПСК в ОСК, осуществляется вырабатываемыми в ЦВК управляющими сигналами, пропорциональными угловой скорости вращения Земли и интегрированной информации с акселерометров X, Z. При этом СП должна разворачиваться относительно инерциальной системы координат (ИСК) с угловыми скоростями:
, где:  ,
,  ,
,  - угловые скорости вращения СП относительно ИСК;
- угловые скорости вращения СП относительно ИСК;
Ω - угловая скорость вращения Земли;
В, L -информация текущих значений географических координат широты и долготы ОСК, поступающая от внешнего навигационного датчика (ГЛОНАСС, GPS и т.п.);
VX, VZ - проекции относительной (путевой) скорости ТС на оси X и Z ОСК, рассчитанные по информации акселерометров X и Z;
RN и RE - кривизна поверхности в текущей точке на эллипсоиде Красовского в направлениях Север-Юг и Запад-Восток в плоскостях сечений эллипсоида, проходящих через ось YO.
В процессе управления СП, в каждом цикле в ЦВК вычисляются:
1. sin В, cos В - значения функций синуса и косинуса широты;
2. ΔВ, ΔL - полные приращения географических координат широты и долготы;
3. VX, VZ - проекции путевой скорости ТС;
4. RN и RE - по информации текущей широты;
5.  - ускорение Кориолиса.
- ускорение Кориолиса.
Проекции относительной скорости ТС на оси ХО и ZO (VX, VZ) определяются интегрированием информации с соответствующих акселерометров о кажущемся ускорении с учетом ускорения Кориолиса по оси Z ОСК:

Ускорение Кориолиса суммируется с кажущимся ускорением при движении ТС в северном полушарии, так как оно направлено влево от вектора скорости перемещения ТС и практически не влияет на параметры движения, но воспринимается акселерометром, расположенным по оси Z СП.
Вычисление погрешностей ИНС происходит с учетом констант ошибок начальной ориентации по углам и угловым скоростям по 3-м осям, определенными на коротком интервале времени во время стоянки ТС, с текущими значениями Vx(z) и ΣVx(z), вычисляемыми по информации с акселерометров, а также внешней информацией текущих значений широты и долготы, в условиях стабильности собственных дрейфов гироблоков.
При идеальном управлении, то есть при отсутствии любых погрешностей в аппаратуре, относительная угловая скорость приборной системы координат в опорной системе координат будет равна нулю и будет сохраняться начальное совпадение ПСК и ОСК.
Начальная выставка обычно имеет погрешности по углам и угловым скоростям. Угловые погрешности вызывают возмущения в системе управления СП в виде проекций ускорения силы тяжести (g) на оси X и Z ПСК и проекций угловой скорости вращения Земли (Ω) на все оси ПСК.
Погрешности начальной угловой скорости сохраняются на протяжении всего времени навигации.
Обозначив углы рассогласования ПСК и ОСК как αХ, αZ и αY, соответствующие угловым отклонениям измерительных осей акселерометров X, Z от ОСК и датчику угла оси YП СП, а погрешности угловых скоростей как δωХ, δωY и δωZ, можно записать значения относительных угловых скоростей ωX, ωY и ωZ, соответственно осям СП ХП, YП, ZП, согласно схеме, представленной на фиг. 2:
Учитывая, что  где Тц - время цикла ЦВК,
где Тц - время цикла ЦВК,
i - индекс текущего операнда, (i-1) - индекс предыдущего операнда, и приведя к виду удобному для интегрирования на ЦВК, получим математическую модель погрешностей, определяющих положение ПСК относительно ОСК в условиях стоянки:
, где: Vx(z) - проекции относительной скорости ТС на оси X и Z ОСК, рассчитанные по информации с акселерометров X и Z в процессе управления СП на стоянке, в каждом цикле ЦВК;
 - константы погрешностей начальной угловой выставки ПСК в ОСК.
- константы погрешностей начальной угловой выставки ПСК в ОСК.
Имея  , можно записать в виде:
, можно записать в виде:
Проинтегрировав (4), подставив в правую часть (5) и, учтя изменение широты и долготы в условиях движения, получим поправочные значения угловых отклонений ориентации ПСК от ОСК 
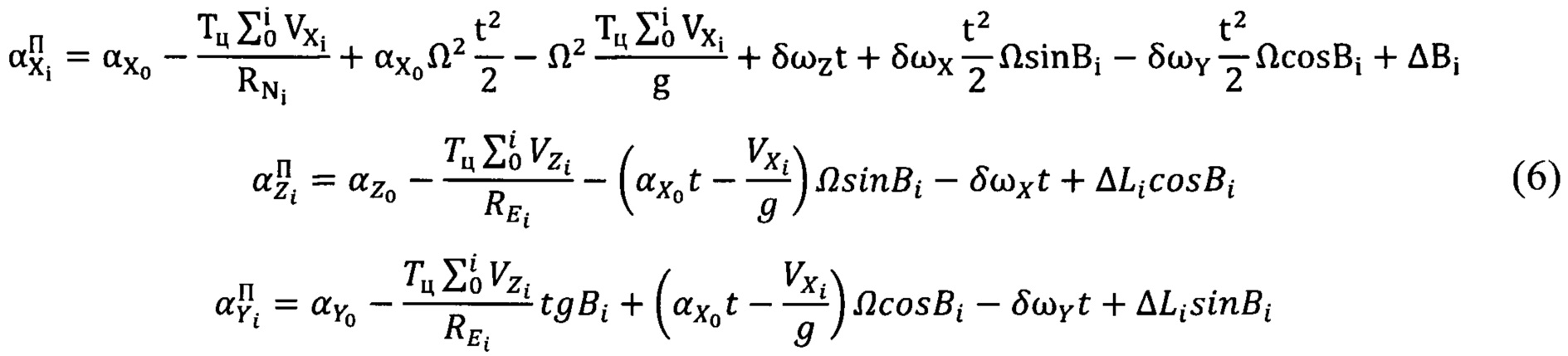
, где: индекс П - поправочное значение угловых отклонений ПСК от ОСК;
ΔLi, ΔBi - текущие (полные) изменения географических координат широты и долготы движущегося ТС.
Формулы (6) позволяют вычислять поправочные значения угловых отклонений ориентации ПСК от ОСК в процессе движения ТС, используя константы 
 δωZ, δωХ и δωY, измеряемые при настройке, во время управления СП сигналами, пропорциональными угловой скорости вращения Земли и интегрированной информации с акселерометров X, Z в первые несколько секунд работы, используя текущие значения широты и долготы, поступающие от внешнего навигационного датчика, а также текущие значения
δωZ, δωХ и δωY, измеряемые при настройке, во время управления СП сигналами, пропорциональными угловой скорости вращения Земли и интегрированной информации с акселерометров X, Z в первые несколько секунд работы, используя текущие значения широты и долготы, поступающие от внешнего навигационного датчика, а также текущие значения  VX(Z)i, вычисляемые в каждом цикле ЦВК во время управления СП, с учетом нестабильности погрешностей всех элементов схемы управления СП в реальном масштабе времени.
VX(Z)i, вычисляемые в каждом цикле ЦВК во время управления СП, с учетом нестабильности погрешностей всех элементов схемы управления СП в реальном масштабе времени.
Нестабильность погрешностей чувствительных элементов и тракта управления гироплатформой, входящих в систему, вызывают, как правило, изменение значений VXi и VZi, которые вычисляются с помощью ЦВК и учитываются в формулах поправок (6) в реальном масштабе времени.
Полученные в каждом цикле ЦВК значения поправок, используются для компенсации погрешностей ИНС.
Углы β, Ψ, K рассчитываются с учетом информации датчиков углов, расположенных по осям В, Р и Т карданова подвеса прибора.
В процессе движения ТС, значения проекций относительных скоростей (Vx, Vz) и их интегралов являются отфильтрованными параметрами, вычисляемыми непрерывно и позволяющими также непрерывно определять поправки угловых отклонений приборного трехгранника ПСК от опорного трехгранника ОСК.
Предлагаемый способ предусматривает следующие операции:
1. Начальную выставку СП в плоскость горизонта и ориентацию по странам света;
2. Управление СП сигналами, пропорциональными угловой скорости вращения Земли и интегрированной информации с акселерометров X, Z, с использованием внешней информации текущих значений географических координат широты ТС;
3. Настройка системы на начальном кратковременном участке управления СП во время стоянки, в ходе которой определяются константы погрешностей начальной угловой выставки ПСК в ОСК  и погрешностей угловых скоростей δωY, δωZ, δωХ;
и погрешностей угловых скоростей δωY, δωZ, δωХ;
4. Выработка поправочных значений угловых отклонений, определяющих положение ПСК относительно ОСК, с учетом нестабильности погрешностей всех элементов схемы управления гироплатформы в реальном масштабе времени;
5. Компенсация погрешностей ИНС;
6. Определение угловой ориентации ТС, с учетом информации с датчиков углов карданова подвеса прибора.
Таким образом, предложен способ, применяемый для определения угловой ориентации (курса, крена, тангажа) наземного транспортного средства, включающий начальную выставку СП ТГС в плоскость горизонта и ориентацию по странам света, управление СП сигналами, пропорциональными угловой скорости вращения Земли и интегрированной информации с акселерометров. Во время стоянки на начальном участке управления СП проводится настройка системы, в ходе которой определяются константы погрешностей начальной угловой выставки приборной системы координат в опорной системе координат и погрешности угловых скоростей. В процессе управления СП в каждом цикле ЦВК, с использованием внешней информации текущих значений географических координат транспортного средства, проводится расчет поправочных значений угловых отклонений приборной системы координат от опорной системы координат с учетом нестабильности погрешностей всех элементов схемы управления СП в реальном масштабе времени. Полученные в каждом цикле ЦВК значения поправок используются для компенсации погрешностей инерциальной навигационной системы и точного определения угловой ориентации транспортного средства по тангажу, рысканию и курсу с учетом информации с датчиков углов.
Техническим результатом применения предлагаемого способа является уменьшение погрешности определения угловой ориентации (курса, крена, тангажа) наземного ТС в процессе движения, в виду учета нестабильности погрешностей чувствительных элементов и тракта управления гироплатформой в реальном масштабе времени, которые согласно особенности управления в режиме обратной связи по информации сигналов с акселерометров, приводятся к погрешностям углов по трем осям, а значит и к изменению величины проекции ускорения силы тяжести на измерительные оси акселерометров.
Список литературы:
1. Патент RU №2098765 «Способ выработки навигационных параметров и вертикали места» (30.09.1994);
2. Патент RU №2107897 «Способ инерциальной навигации» (10.04.1995);
3. О.С. Салычев, Волновое описание возмущений в задачах оценки ошибок инерциальных систем навигации, - Москва. Машиностроение, - 1992, - стр. 128-141;
4. Инерциальные навигационные системы морских объектов, Д.П. Лукьянов, А.В. Мочалов, А.А. Одинцов, И.Б. Вайсгант, - Ленинград. Судостроение, - 1989, 184 с.
Способ определения угловой ориентации наземного транспортного средства, включающий начальную выставку стабилизированной платформы (СП) трехосного гиростабилизатора в плоскость горизонта и ориентацию по странам света, управление СП сигналами, пропорциональными угловой скорости вращения Земли и интегрированной информации с акселерометров, компенсацию погрешностей инерциальной навигационной системы, отличающийся тем, что во время стоянки на начальном участке управления СП проводится настройка системы, в ходе которой определяются константы погрешностей начальной угловой выставки приборной системы координат в опорной системе координат и погрешности угловых скоростей, в процессе управления СП в каждом цикле цифровым вычислительным комплексом (ЦВК), с использованием внешней информации текущих значений географических координат транспортного средства, проводится расчет поправочных значений угловых отклонений приборной системы координат от опорной системы координат с учетом нестабильности погрешностей всех элементов схемы управления СП в реальном масштабе времени, полученные в каждом цикле ЦВК значения поправок используются для компенсации погрешностей инерциальной навигационной системы и точного определения угловой ориентации транспортного средства по тангажу, рысканию и курсу с учетом информации с датчиков углов.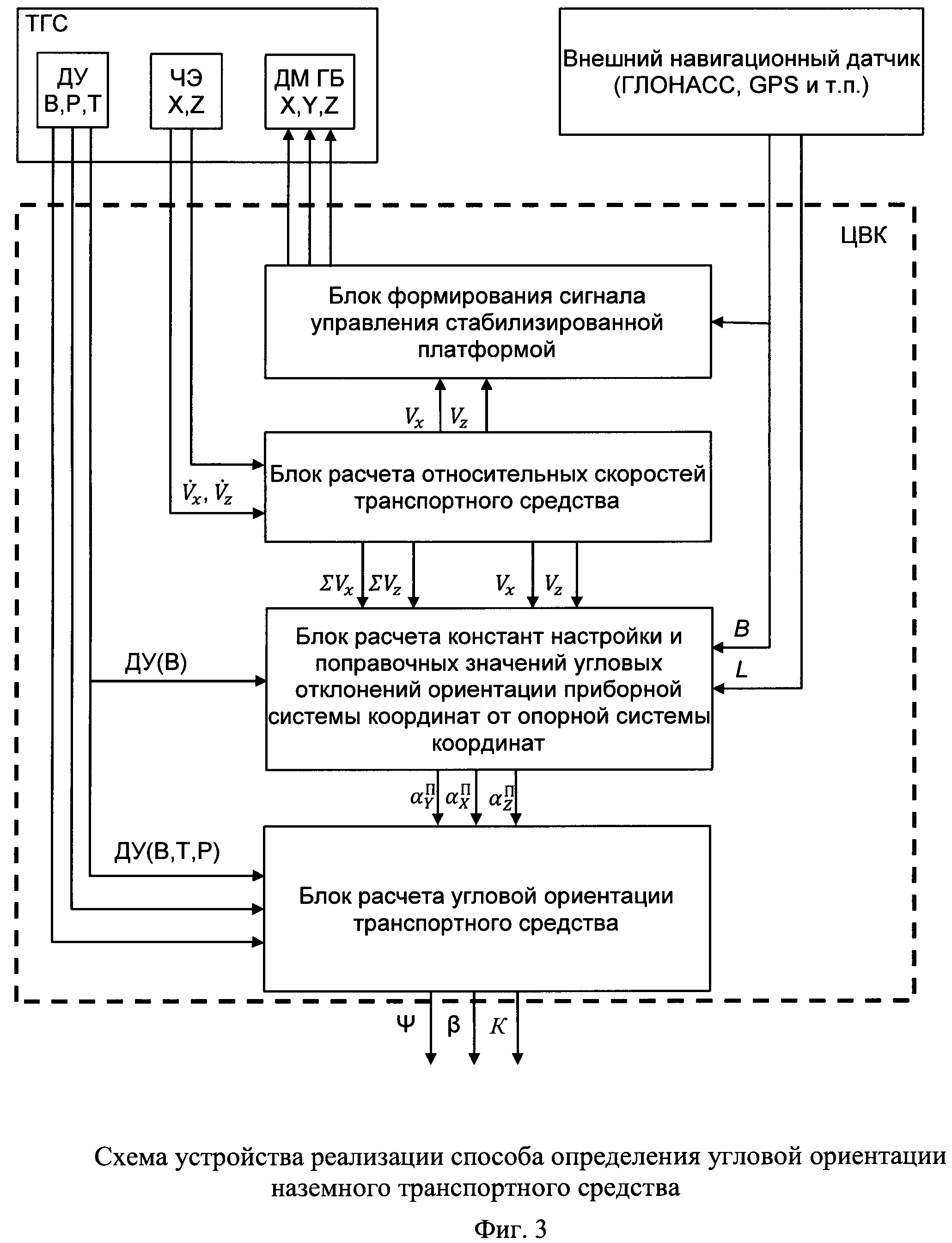
Приборная панель космического аппарата
Кассетный боеприпас
Артиллерийский осколочно-фугасный снаряд
Сопло летательного аппарата
Кран шаровой
Тренога
Солнечная батарея
Силовой блок двигательной установки ракеты-носителя
Логопериодическая антенна
Клапан
Способ скрининговой оценки пролиферативной активности клеток в процессе роста

