Результат интеллектуальной деятельности: СВЕРХШИРОКОПОЛОСНОЕ РАДИОЧАСТОТНОЕ ОТСЛЕЖИВАНИЕ ОРУДИЯ НА РАБОЧЕМ ТРАНСПОРТНОМ СРЕДСТВЕ
Вид РИД
Изобретение
Уровень техники
Некоторые рабочие транспортные средства могут быть оборудованы датчиками положения, которые обнаруживают изменение положения орудия рабочего транспортного средства вдоль заданного направления. Например, рабочее транспортное средство может быть оборудовано датчиками поворота или датчиками положения цилиндров, которые обнаруживают изменения положения орудий на рабочем транспортном средстве (например, ножа на грейдере или стрелы на экскаваторе). Однако, датчики положения могут иметь ограниченную точность определения положения вследствие гистерезиса зубчатой передачи или рычажной передачи, которые управляют перемещением орудия.
Еще одним способом определения положения орудия на рабочем транспортном средстве является установка на орудие приемника системы глобального позиционирования (GPS). Например, грейдер может включать в себя одну или более мачт, продолжающихся от ножа, которые имеют установленный на них GPS приемник. GPS приемник предоставляет рабочему транспортному средству приблизительное местоположение мачты. Однако, использование технологии GPS обеспечивает только грубое приближение положения орудия, а размер и положение мачт может ограничивать перемещение, использование и конструкцию орудия.
Сущность изобретения
Некоторые варианты осуществления, описанные в данном документе, предоставляют системы и способы определения положения орудия на рабочем транспортном средстве относительно локальной системы координат с использованием сверхширокополосного измерения расстояния. Система может заключать в себе GPS для точного определения локальной системы координат относительно глобальной системы координат. Система предоставляет безмачтовое решение, которое обеспечивает высокоточное обнаружение положения. В частности, система может отслеживать положение орудия с точностью приблизительно до 2 мм. За счет установки локальной системы координат с высокоточным обнаружением положения, система обеспечивает повышенную точность управления положением орудия на рабочем транспортном средстве.
Один вариант осуществления предоставляет способ определения положения орудия на рабочем транспортном средстве. Способ включает в себя определение положения первого радиочастотного (RF) устройства относительно локальной системы координат с использованием сверхширокополосного измерения расстояния между первым RF-устройством и по меньшей мере одним дополнительным RF-устройством. Дополнительное RF-устройство установлено в фиксированном местоположении относительно локальной системы координат, а первое RF-устройство связано с фиксированным местоположением на орудии. Орудие можно управляемо перемещать относительно локальной системы координат. Способ включает в себя определение положения и ориентации орудия относительно локальной системы координат по меньшей мере частично на основании определенного положения первого RF-устройства относительно локальной системы координат.
Еще один вариант осуществления предоставляет систему для определения положения орудия на рабочем транспортном средстве. Система включает в себя первое радиочастотное (RF) устройство, связанное с фиксированным местоположением на орудии, и по меньшей мере одно дополнительное RF-устройство, установленное в фиксированном местоположении относительно локальной системы координат. Система также включает в себя электронный процессор, соединенный с возможностью связи с первым RF-устройством и по меньшей мере одним дополнительным RF-устройством. Электронный процессор выполнен с возможностью определения положения первого RF-устройства относительно локальной системы координат с использованием сверхширокополосного измерения расстояния между первым RF-устройством и по меньшей мере одним дополнительным RF-устройством. Электронный блок управления определяет положение и ориентацию орудия относительно локальной системы координат по меньшей мере частично на основании определенного положения первого RF-устройства относительно локальной системы координат.
Другие аспекты раскрытия станут понятны при рассмотрении подробного описания и сопровождающих чертежей.
Краткое описание чертежей
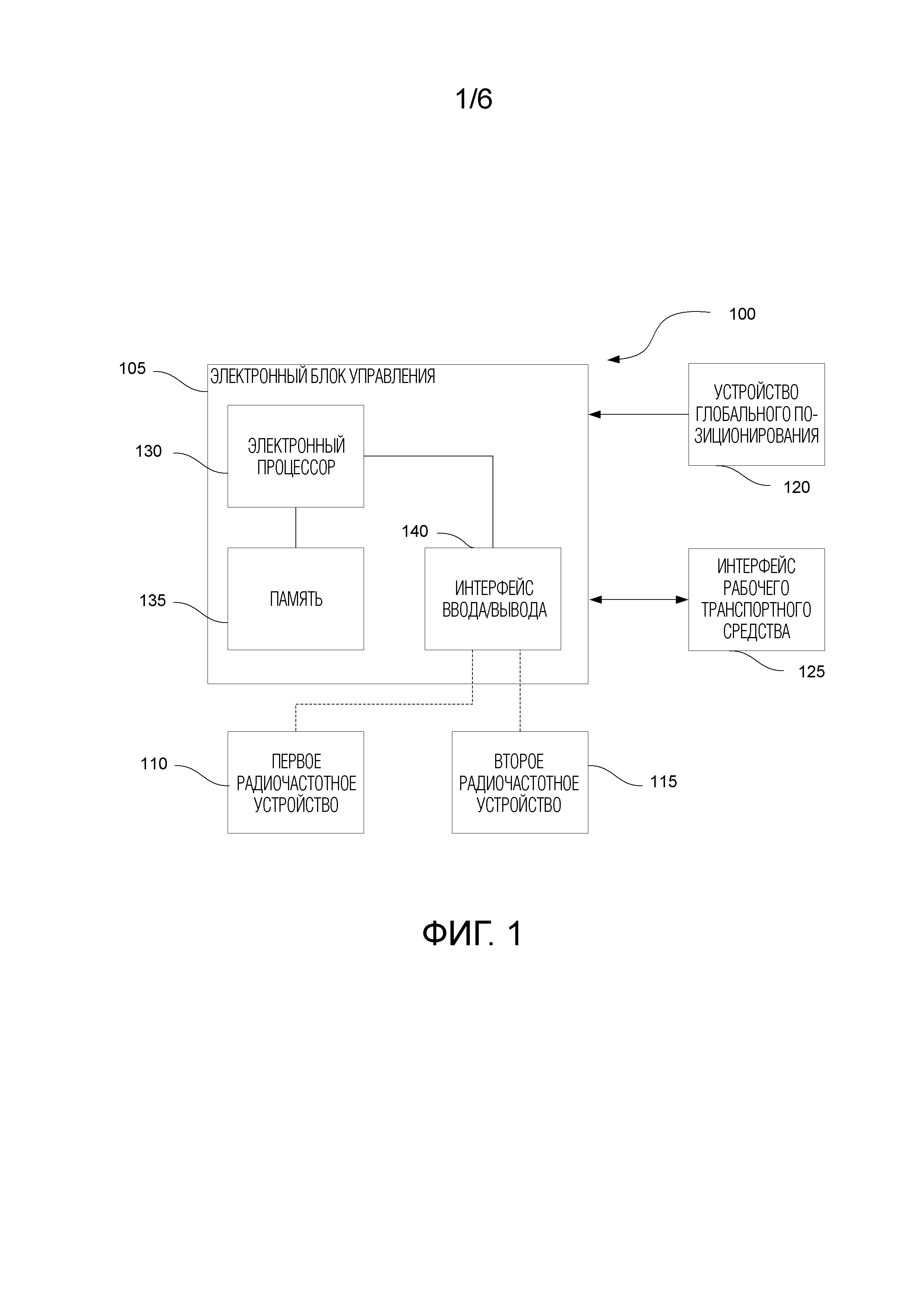
Фиг. 1 представляет собой блок-схему сверхширокополосной системы отслеживания положения согласно одному варианту осуществления.
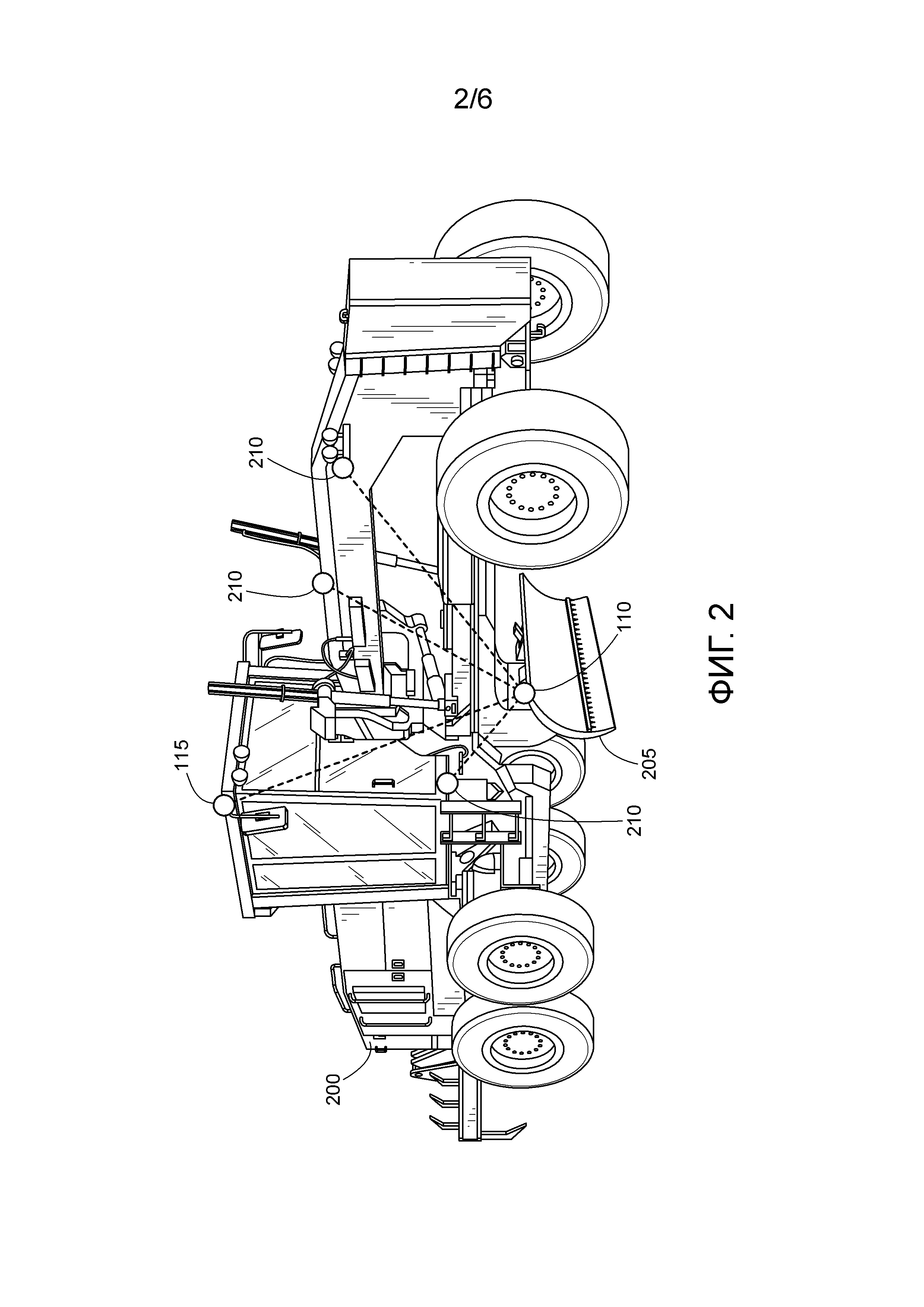
Фиг. 2 представляет собой перспективное изображение рабочего транспортного средства, оборудованного сверхширокополосной системой отслеживания положения фиг. 1 согласно одному варианту осуществления.
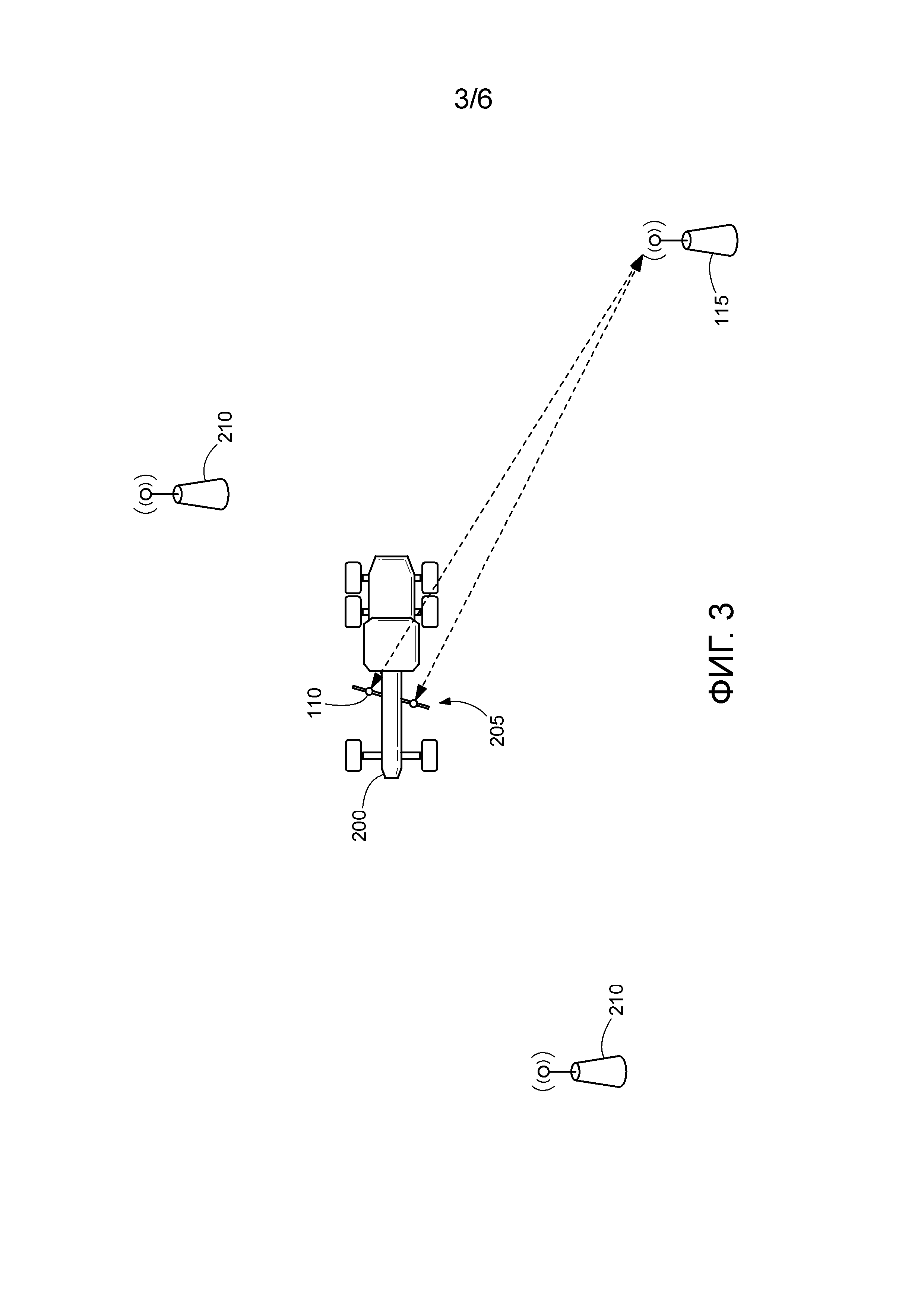
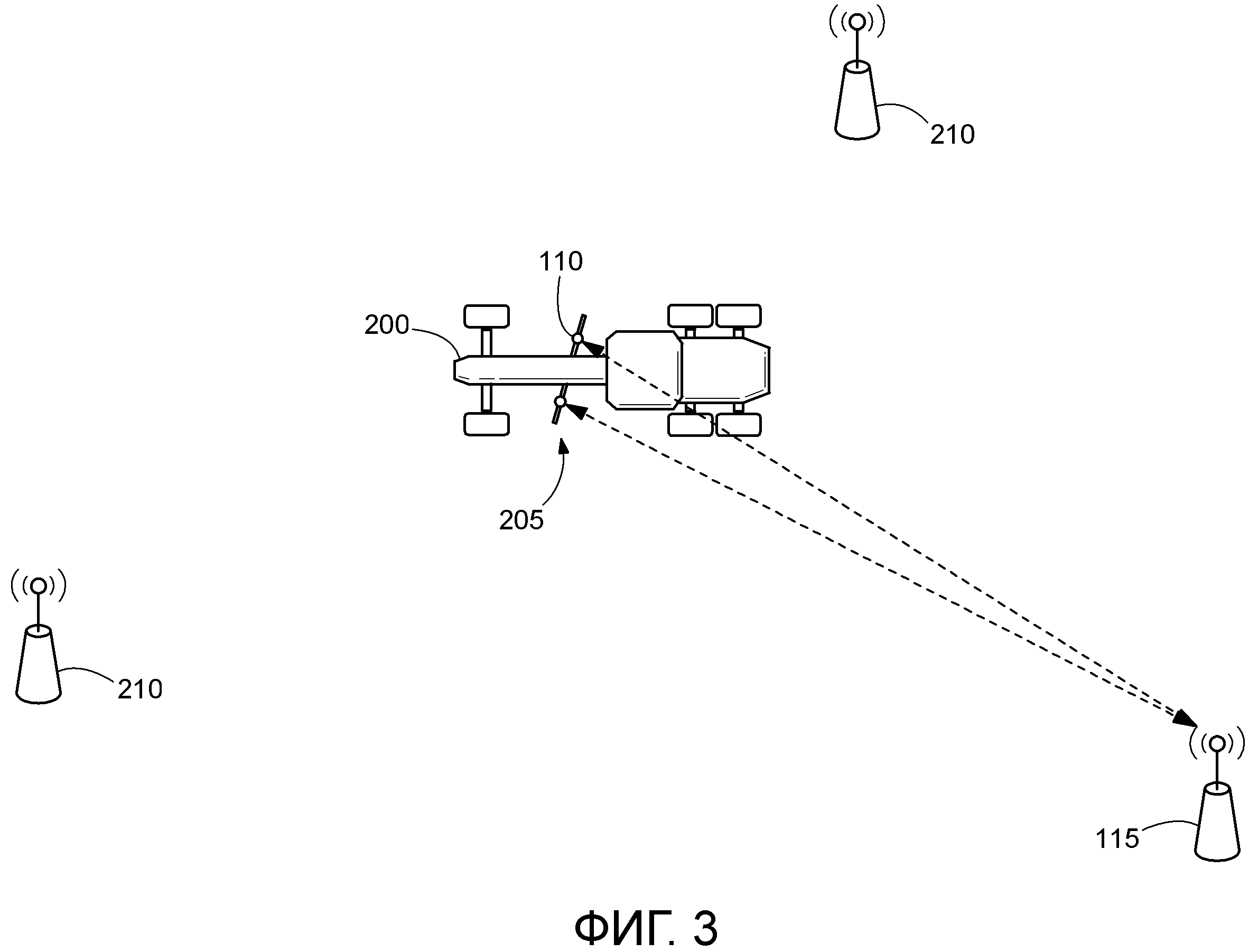
Фиг. 3 представляет собой вид сверху локальной области, включающей в себя сверхширокополосную систему отслеживания положения фиг. 1 согласно одному варианту осуществления.
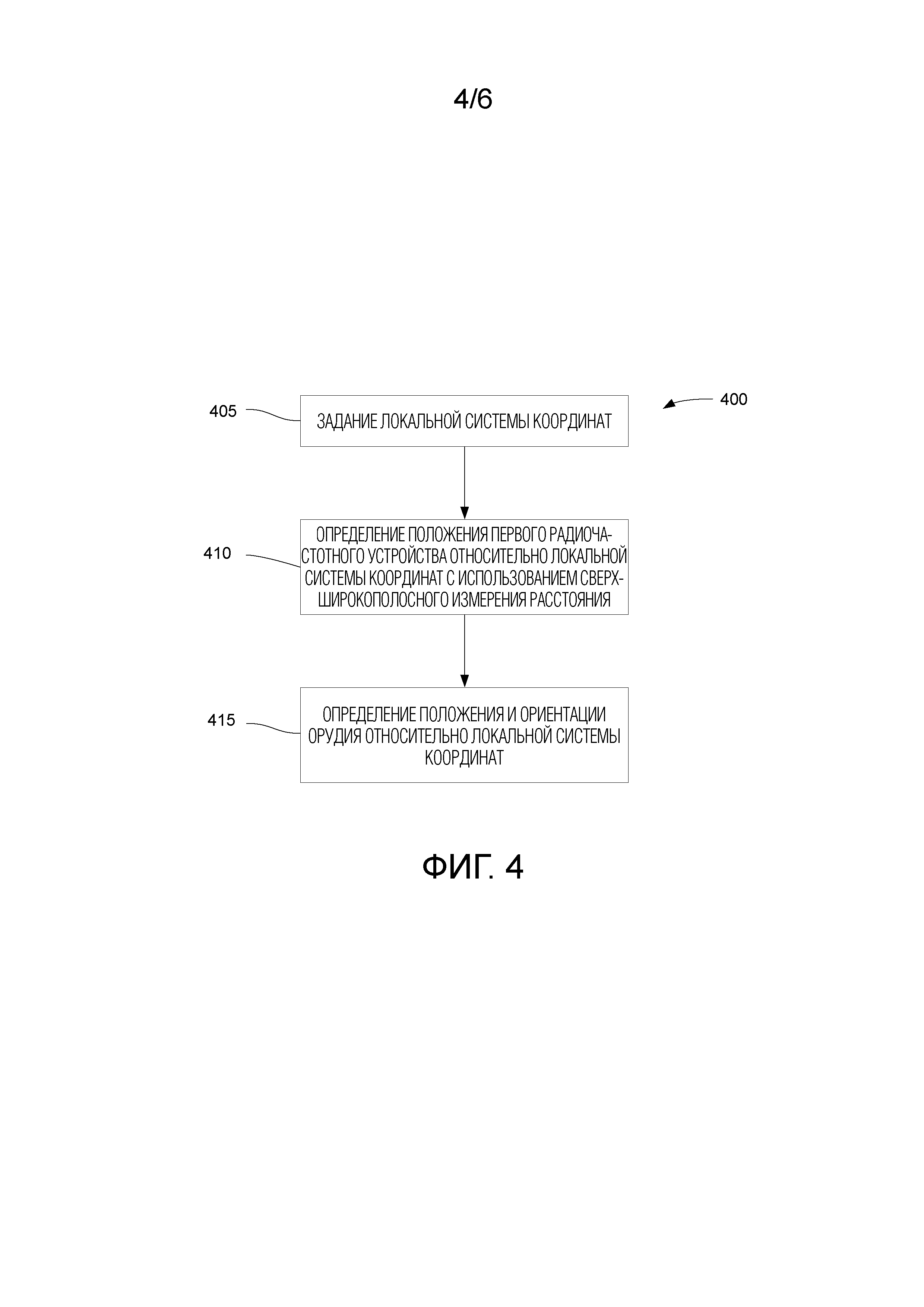
Фиг. 4 представляет собой блок-схему способа определения положения орудия на рабочем транспортном средстве с использованием сверхширокополосной системы отслеживания положения фиг. 1 согласно одному варианту осуществления.
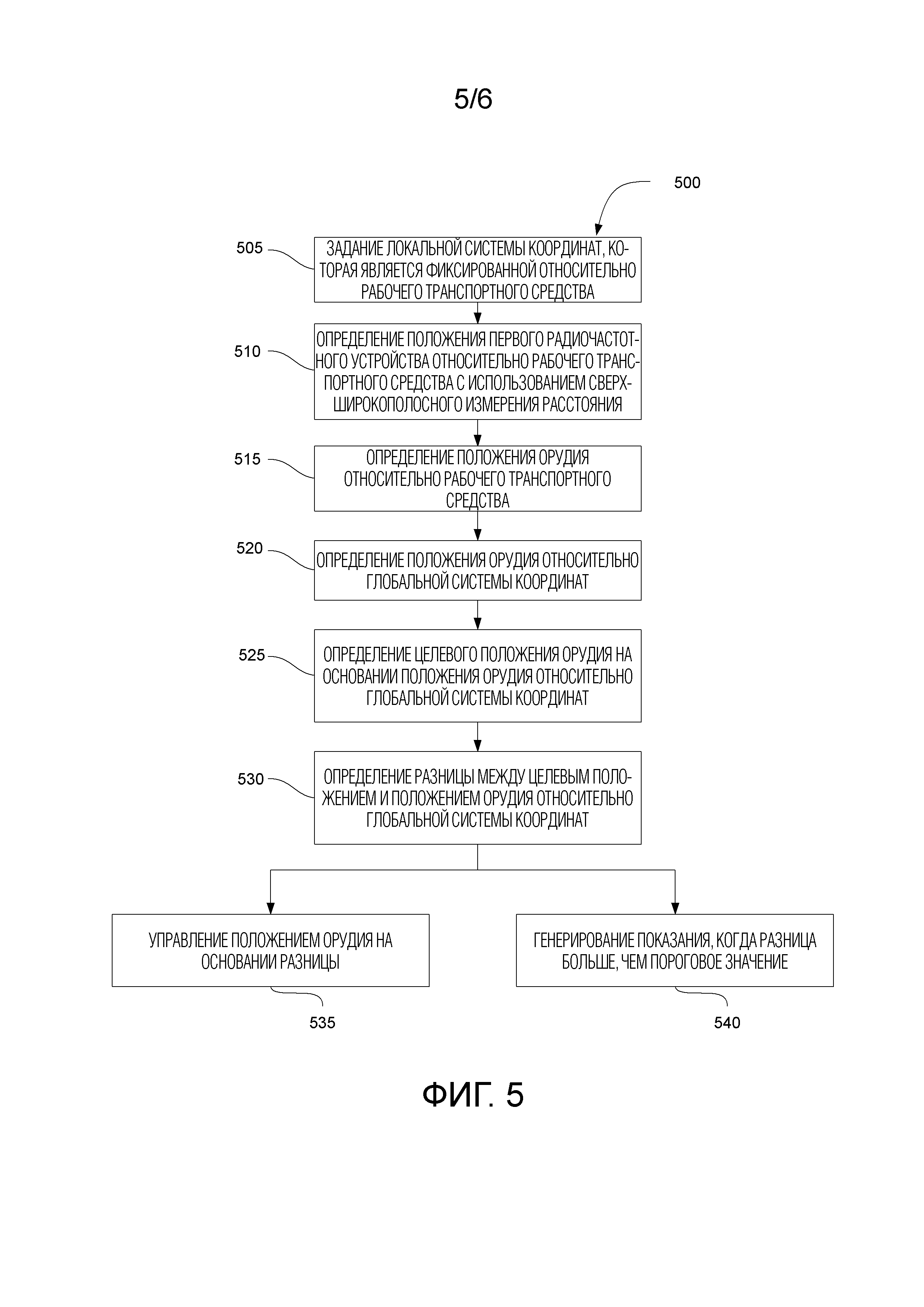
Фиг. 5 представляет собой блок-схему способа определения положения орудия на рабочем транспортном средстве фиг. 2 согласно одному варианту осуществления.
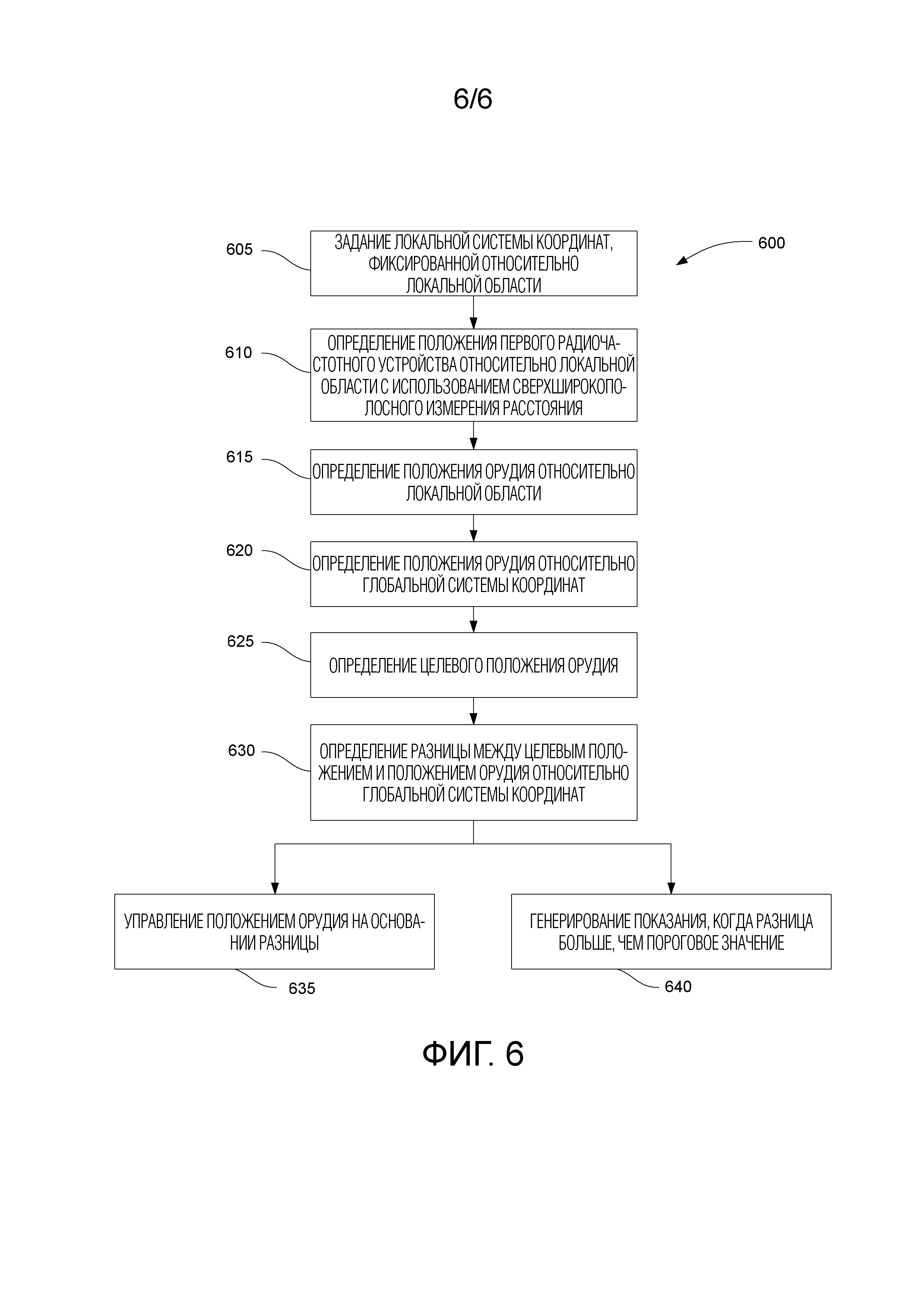
Фиг. 6 представляет собой блок-схему способа определения положения орудия в пределах локальной области фиг. 3 согласно одному варианту осуществления.
Подробное описание
Перед подробным объяснением каких-либо вариантов осуществления следует понять, что варианты осуществления, раскрытые в данном документе, не ограничены деталями конструкции и компоновки составных элементов, изложенными в последующем описании или проиллюстрированными на последующих чертежах. Варианты осуществления допускают другие конфигурации и практическое осуществление или выполнение различными способами.
Для реализации различных вариантов осуществления может быть использовано множество устройств, основанных на аппаратном обеспечении и программном обеспечении, а также множество различных конструктивных составных элементов. В дополнение, варианты осуществления могут включать в себя аппаратное обеспечение, программное обеспечение и электронные составные элементы или модули, которые для целей обсуждения могут быть проиллюстрированы и описаны, как если бы большая часть составных элементов была реализована только в виде аппаратного обеспечения. Однако, специалист в данной области техники на основании прочтения данного подробного описания должен понять, что по меньшей мере в одном варианте осуществления различные аспекты могут быть реализованы в виде программного обеспечения (например, хранящегося на некратковременном машиночитаемом носителе), выполняемого одним или более процессорами. Соответственно, следует заметить, что для реализации различных вариантов осуществления может быть использовано множество устройств, основанных на аппаратном обеспечении и программном обеспечении, а также множество различных конструктивных составных элементов. Например, «блоки управления» и «контроллеры», описанные в спецификации, могут включать в себя один или более электронных процессоров, один или более запоминающих модулей, включая некратковременный машиночитаемый носитель, один или более интерфейсов ввода/вывода и различные соединения (например, системную шину), соединяющие составные элементы.
Фиг. 1 иллюстрирует сверхширокополосную систему 100 отслеживания положения согласно одному варианту осуществления. В проиллюстрированном примере сверхширокополосная система 100 отслеживания положения включает в себя электронный блок 105 управления, первое радиочастотное (RF) устройство 110, второе радиочастотное (RF) устройство 115, устройство 120 глобального позиционирования (например, GPS приемник) и интерфейс 125 рабочего транспортного средства. В некоторых вариантах осуществления сверхширокополосная система 100 отслеживания положения расположена на рабочем транспортном средстве или внутри него, как описано ниже. В других вариантах осуществления сверхширокополосная система 100 отслеживания положения частично расположена на рабочем транспортном средстве или внутри него, а частично расположена снаружи рабочего транспортного средства (например, расположена в пределах рабочей площадки). Аналогичным образом, электронный блок 105 управления сверхширокополосной системы 100 отслеживания положения может быть расположен в рабочем транспортном средстве или внутри него, или может быть расположен за пределами рабочего транспортного средства (например, на рабочей площадке).
В некоторых вариантах осуществления электронный блок 105 управления соединен с возможностью связи как с первым RF-устройством 110, так и со вторым RF-устройством 115. Например, в одном варианте осуществления электронный блок 105 управления соединен с возможностью связи как с первым RF-устройством 110, так и со вторым RF-устройством 115 посредством радиочастотного соединения ближнего действия (например, локальной вычислительной сети, Bluetooth и тому подобное). В других вариантах осуществления первое RF-устройство 110 и второе RF-устройство 115 соединены с возможностью связи посредством проводного соединения. В некоторых вариантах осуществления электронный блок 105 управления может функционировать в качестве второго RF-устройства 115 за счет создания сверхширокополосных радиочастотных сигналов единственным радиочастотным передатчиком с множеством антенн (расположенных во множестве местоположений) или множеством радиочастотных передатчиков или приемопередатчиков, расположенных во множестве различных местоположений.
В дополнение, в некоторых вариантах осуществления первое RF-устройство 110 не соединено с возможностью связи с электронным блоком 105 управления, но вместо этого соединено с возможностью связи только со вторым RF-устройством 115. В частности, второе RF-устройство 115 может обеспечивать обмен данными с электронным блоком 105 управления, функционирующим таким образом в качестве основного блока, с первым RF-устройством, функционирующим в качестве подчиненного блока. В этом случае первое RF-устройство 110 может представлять собой дополнительное или пассивное устройство, которое отвечает на сигналы, получаемые из второго RF-устройства 115. В частности, первое RF-устройство 110 может включать в себя множество приемников, ретрансляторов, отражателей и тому подобное, которые выполнены с возможностью генерирования сигнала только в ответ на сигналы, получаемые из второго RF-устройства 115. В некоторых вариантах осуществления сверхширокополосные радиочастотные сигналы, генерируемые вторым RF-устройством 115, передаются в первое RF-устройство 110 и побуждают первое RF-устройство 110 генерировать сверхширокополосный радиочастотный сигнал для приема во втором RF-устройстве 115. Таким образом, первое RF-устройство 110 и второе RF-устройство 115 обмениваются данными друг с другом посредством сверхширокополосных радиочастотных сигналов в то время, как электронный блок 105 управления может обмениваться данными посредством других беспроводных или проводных сигналов. В частности, сверхширокополосные радиочастотные сигналы могут занимать частотный диапазон больше, чем 20% среднеарифметической частоты или больше, чем 500 МГц. В некоторых вариантах осуществления амплитуда мощности сверхширокополосного измерения расстояния выполнена с возможностью обеспечения дальности отслеживания, которая меньше, чем длина рабочего транспортного средства, а сверхширокополосное измерение расстояния выполняется таким образом, что уменьшение дальности отслеживания приводит к соответствующему повышению точности отслеживания.
Электронный блок 105 управления также соединен с возможностью связи с устройством 120 глобального позиционирования и интерфейсом 125 рабочего транспортного средства. В некоторых вариантах осуществления устройство 120 глобального позиционирования предоставляет местоположение рабочего транспортного средства относительно глобальной системы координат. В других вариантах осуществления устройство 120 глобального позиционирования предоставляет местоположение рабочей площадки относительно глобальной системы координат. План площадки может включать в себя ссылки на местоположения в пределах глобальной системы координат для предоставления информации относительно требуемого рельефа или желательных модификаций, которые должны быть выполнены рабочим транспортным средством в конкретных местоположениях в пределах рабочей площадки. В частности, план площадки может обрисовать работу, которая должна быть выполнена во множестве местоположений, на основании координат этого множества местоположений в глобальной системе. Интерфейс 125 рабочего транспортного средства может быть выполнен с возможностью осуществления функций ввода/вывода для оператора рабочего транспортного средства. Например, интерфейс 125 рабочего транспортного средства может включать в себя дисплей с сенсорным экраном, который предоставляет оператору показания состояния сверхширокополосной системы 100 отслеживания положения. В частности, интерфейс 125 рабочего транспортного средства может предоставлять показания, в том числе звуковые, зрительные, тактильные или комбинацию вышеизложенного, относительно позиционирования рабочего транспортного средства и позиционирования орудий на рабочем транспортном средстве.
Электронный блок 105 управления включает в себя множество электрических и электронных составных элементов, которые обеспечивают энергию, управление работой и защиту составных элементов и модулей внутри электронного блока 105 управления. Электронный блок 105 управления среди прочего включает в себя электронный процессор 130 (такой как программируемый электронный микропроцессор, микроконтроллер или аналогичное устройство), память 135 (например, некратковременную, машиночитаемую память) и интерфейс 140 ввода/вывода. Электронный процессор 130 соединен с возможностью связи с памятью 135 и выполняет команды, которые допускают хранение в памяти 135. Электронный процессор 130 выполнен с возможностью извлечения из памяти 135 и выполнения, среди прочего, команд, связанных с процессами и способами, описанными в данном документе. В других вариантах осуществления электронный блок 105 управления включает в себя дополнительные, меньшее количество или иные составные элементы. Например, электронный блок 105 управления может быть реализован в виде нескольких независимых электронных блоков управления, каждый из которых выполнен с возможностью осуществления конкретных функций или вспомогательных функций. Дополнительно, электронный блок 105 управления может заключать в себе вспомогательные модули, которые генерируют или передают сигналы управления в первое RF-устройство 110 и во второе RF-устройство 115. Например, электронный блок 105 управления может посылать сигнал управления во второе RF-устройство 115, чтобы инициировать подачу сверхширокополосных радиочастотных сигналов, как обсуждалось в данном документе. В других вариантах осуществления электронный блок 105 управления может генерировать и передавать сверхширокополосные радиочастотные сигналы посредством одной или более антенн, которые служат в качестве второго RF-устройства 115.
Фиг. 2 иллюстрирует перспективное изображение рабочего транспортного средства 200, оборудованного сверхширокополосной системой 100 отслеживания положения. В проиллюстрированном примере рабочее транспортное средство 200 включает в себя орудие 205. Орудие 205 включает в себя управляемо передвигаемое приспособление, нож, рычаг, ковш и тому подобное, которым управляют с возможностью выполнения рабочей задачи. Например, рабочее транспортное средство 200 может представлять собой грейдер с орудием-ножом, которым управляют с возможностью придания земной поверхности формы. В данном примере орудие 205 передвигается относительно рабочего транспортного средства 200 до требуемой высоты, угла, наклона и тому подобное. В проиллюстрированном примере рабочее транспортное средство 200 оборудовано первым RF-устройством 110 и вторым RF-устройством 115. Первое RF-устройство 110 расположено с возможностью передвижения наряду с орудием 205. В некоторых вариантах осуществления первое RF-устройство 110 прикрепляют к орудию посредством установки непосредственно на орудие 205. Второе RF-устройство 115 может быть прикреплено к рабочему транспортному средству посредством установки в фиксированном положении на рабочем транспортном средстве 200. В дополнение ко второму RF-устройству 115 на рабочем транспортном средстве 200 во множестве местоположений также может быть расположено множество дополнительных приемопередатчиков 210, которые работают аналогично второму RF-устройству 115 для определения положения первого RF-устройства 110 относительно рабочего транспортного средства 200. Как показано в примере фиг. 2, множество дополнительных приемопередатчиков 210 установлены в местах вокруг первого RF-устройства 110 и на противоположных сторонах первого RF-устройства 110 для улучшения способности сверхширокополосной системы 100 отслеживания положения точно определять местоположение первого RF-устройства 110 (например, посредством триангуляции).
Фиг. 3 иллюстрирует альтернативное исполнение сверхширокополосной системы 100 отслеживания положения, в которой второе RF-устройство 115 и дополнительные приемопередатчики 210 расположены в различных иных местах в пределах локальной области (например, рабочей площадки), а не установлены или прикреплены к самому рабочему транспортному средству 200. Второе RF-устройство 115 и множество дополнительных приемопередатчиков 210 установлены в неподвижных местоположениях относительно рабочей площадки. В примере фиг. 3 множество устройств расположены в местоположениях на многих сторонах мест, где будет работать рабочее транспортное средство 200 (т.е., на рабочей площадке). В этом случае множество устройств передают сигналы в первое RF-устройство 110, расположенное на орудии 205 рабочего транспортного средства 200. Первое RF-устройство 110 по мере получения сигналов передает сигналы назад во второе RF-устройство 115. Это позволяет электронному блоку 105 управления определять местоположение орудия 205 относительно второго RF-устройства 115, определяя таким образом местоположение орудия относительно локальной области. В некоторых вариантах осуществления каждое из множества устройств может включать в себя GPS модуль для задания системы координат локальной области относительно глобальной системы координат, например, GPS координат.
В примере фиг. 2 локальная система координат задается относительно рабочего транспортного средства 200, а положение орудия 205 (которое задается положением первого RF-устройства 110) определяется относительно рабочего транспортного средства 200 (в локальной системе координат, задаваемой размещением второго RF-устройства 115 и любых дополнительных приемопередатчиков 210). В примере фиг. 3 локальная система координат задается относительно рабочей площадки, а положение орудия 205 (которое задается положением первого RF-устройства 110) определяется относительно рабочей площадки (в локальной системе координат, задаваемой размещением второго RF-устройства 115 и любых дополнительных приемопередатчиков 210). В некоторых исполнениях системы, проиллюстрированной на фиг. 3, положение орудия 205 определяется относительно рабочей площадки без ссылки на положение самого рабочего транспортного средства 200. В каждом случае (и как описано более подробно ниже), положение орудия 205 определяется относительно локальной системы координат без использования GPS, а после определения положения локальной системы координат относительно глобальной системы координат (например, с использованием GPS) можно определять и отслеживать положение орудия 205 в глобальной системе координат.
Для установки относительного местоположения первого RF-устройства 110 относительно второго RF-устройства 115 первое RF-устройство 110 и второе RF-устройство 115 могут воплощать различные технологии. Для обеспечения определения положения первого RF-устройства 110 второе RF-устройство 115, расположено ли на рабочем транспортном средстве 200 или в пределах локальной области, генерирует множество сигналов на многих сторонах первого RF-устройства 110. Например, сверхширокополосная система 100 отслеживания положения может заключать в себе вычисления времени пролета (т.е. времени прихода) для определения расстояния между первым RF-устройством 110 и вторым RF-устройством 115. Множество определений времени пролета между множеством RF-устройств, действующих в качестве второго RF-устройства 115, и множеством RF-устройств, действующих в качестве первого RF-устройства 110, могут обеспечивать 3-мерное определение местоположения в пределах локальной области и определение ориентации орудия 205. В данном первом примере электронный блок 105 управления, первое RF-устройство 110 и второе RF-устройство 115 синхронизированы по времени, чтобы обеспечить возможность расчета времени пролета. В еще одном примере сверхширокополосная система 100 отслеживания положения может заключать в себе вычисления разницы времени прихода. В данном втором примере по времени синхронизированы передатчики, но не обязательно первое RF-устройство 110 и электронный блок 105 управления. В еще одном примере сверхширокополосная система 100 отслеживания положения может использовать вычисления угла прихода. В данном третьем примере второе RF-устройство 115 включает в себя антенную решетку, которая выполнена с возможностью измерения угла приема переданных сверхширокополосных радиочастотных сигналов. В еще одном примере сверхширокополосная система 100 отслеживания положения может использовать вычисления силы получаемых сигналов для определения расстояния между первым RF-устройством 110 и вторым RF-устройством 115. В некоторых вариантах осуществления сверхширокополосная система 100 отслеживания положения выполнена с возможностью использования комбинации вышеизложенных технологий для выполнения сверхширокополосного измерения расстояния.
Хотя примеры фигур 2 и 3 показывают только единственное RF-устройство 110, установленное на орудии 205, в некоторых вариантах осуществления первое RF-устройство 110 включает в себя множество устройств, расположенных в различных местах на орудии 205. Каждое из данных устройств может действовать независимо в ответ на сигналы, получаемые от второго RF-устройства 115. Электронный блок 105 управления может определять на основании независимых ответов местоположение каждого из множества устройств с использованием технологий, описанных выше. Например, каждое из множества устройств может быть расположено в предварительно определенных положениях на орудии 205, устанавливая таким образом взаимное расположение между множеством устройств. Поскольку относительное положение множества устройств на орудии 205 известно, электронный блок 105 управления может определять точную ориентацию орудия 205. Например, электронный блок 105 управления может определять высоту, угол, глубину и тому подобное орудия 205.
Фиг. 4 иллюстрирует способ 400 определения положения орудия 205 на рабочем транспортном средстве 200 с использованием сверхширокополосной системы 100 отслеживания положения согласно одному варианту осуществления. Перед выполнением способа 400 первое RF-устройство 110 располагают на орудии 205, а второе RF-устройство 115 располагают в фиксированном местоположении относительно локальной системы координат. В способе 400 локальная система координат задается электронным блоком 105 управления (блок 405). Локальная система координат предоставляет механизм для задания положения первого RF-устройства 110 локально (т.е. без GPS) в качестве системы координат, фиксированной относительно второго RF-устройства 115. Например, локальная система координат может иметь происхождение во втором RF-устройстве 115, в электронном блоке 105 управления, в фиксированном местоположении на рабочем транспортном средстве 200 или в фиксированном местоположении в локальной области. Положение первого RF-устройства 110 определяется относительно локальной системы координат с использованием сверхширокополосного радиочастотного измерения расстояния (блок 410). Как обсуждалось выше, положение может быть определено с использованием различных технологий сверхширокополосного измерения расстояния, включая время прихода, угол прихода, разницу времени прихода, силу принимаемого сигнала или какую-то комбинацию вышеизложенного. Затем на основании определенного положения первого RF-устройства 110 определяется положение орудия 205 относительно локальной системы координат (блок 415). В вариантах осуществления, которые включают в себя множество RF-устройств, таких как первое RF-устройство 110, также определяется ориентация орудия 205.
Фиг. 5 иллюстрирует способ определения положения орудия 205, когда второе RF-устройство 115 располагают на рабочем транспортном средстве 200, как показано в примере фиг. 2. Перед выполнением способа 500 первое RF-устройство 110 располагают на орудии 205, а второе RF-устройство 115 располагают в фиксированном местоположении на рабочем транспортном средстве 200. В способе 500 задается локальная система координат (блок 505). Положение первого RF-устройства 110 относительно рабочего транспортного средства 200 определяется электронным блоком 105 управления с использованием сверхширокополосного радиочастотного измерения расстояния (блок 510). На основании положения первого RF-устройства 110 определяется положение орудия 205 относительно рабочего транспортного средства 200 (блок 515). Определяется положение орудия 205 относительно глобальной системы координат (блок 520). Данное определение может быть выполнено на основании положения орудия 205 относительно рабочего транспортного средства 200 и положения рабочего транспортного средства 200 относительно глобальной системы координат. В частности, положение рабочего транспортного средства 200 относительно глобальной системы координат может быть определено на основании сигналов, получаемых из устройства 120 глобального позиционирования.
В некоторых вариантах осуществления также определяется целевое положение орудия 205 (блок 525). Целевое положение может быть определено по меньшей мере частично на основании определенного положения орудия относительно глобальной системы координат и плана площадки, как обсуждалось выше. Затем определяется разница (т.е. ошибка позиционирования) между целевым положением и положением орудия 205 относительно глобальной системы координат (блок 530). Затем на основании разницы электронный блок 105 управления способен выполнять несколько функций. Например, в одном варианте осуществления электронный блок 105 управления автоматически управляет положением орудия 205 с использованием систем управления в рабочем транспортном средстве 200 (блок 535). В еще одном примере электронный блок 105 управления может генерировать указание, когда разница больше, чем пороговое значение (блок 540). В частности, электронный блок 105 управления может передавать сигнал в интерфейс 125 рабочего транспортного средства, который генерирует уведомление для оператора рабочего транспортного средства 200. Уведомление может предупреждать оператора, что орудие 205 находится за пределами предварительно определенной дальности, которая может быть отрегулирована посредством установки различных значений для порогового значения. Затем оператор может вручную изменять положение орудия 205.
Фиг. 6 иллюстрирует способ определения положения орудия 205, когда второе RF-устройство 115 расположено в пределах локальной области, но не установлено на самом рабочем транспортном средстве 200, как показано в примере фиг. 3. Перед выполнением способа 600 первое RF-устройство 110 располагают на орудии 205, а второе RF-устройство 115 располагают в фиксированном местоположении относительно локальной области. В способе 600 задается локальная система координат (блок 605). Положение первого RF-устройства 110 относительно локальной области определяется электронным блоком 105 управления с использованием сверхширокополосного радиочастотного измерения расстояния (блок 610). На основании положения первого RF-устройства 110 определяется положение орудия 205 относительно локальной области (блок 615). Затем определяется положение орудия 205 относительно глобальной системы координат (блок 620). Данное определение может быть выполнено на основании положения орудия 205 относительно локальной области и положения локальной области относительно глобальной системы координат. В частности, положение локальной области относительно глобальной системы координат может быть определено на основании сигналов, получаемых из устройства 120 глобального позиционирования.
В некоторых вариантах осуществления также определяется целевое положение орудия 205 (блок 625). Аналогично способу 500 целевое положение может быть определено по меньшей мере частично на основании определенного положения орудия относительно глобальной системы координат и плана площадки. Затем определяется разница (т.е. ошибка позиционирования) между целевым положением и положением орудия 205 относительно глобальной системы координат (блок 630). Затем на основании разницы электронный блок 105 управления способен выполнять несколько функций. Например, в одном варианте осуществления электронный блок 105 управления автоматически управляет положением орудия 205 с использованием систем управления в рабочем транспортном средстве 200 (блок 635). Это может включать в себя передачу управляющей информации в еще один электронный блок управления внутри рабочего транспортного средства 200, который выполнен с возможностью осуществления автоматического управления орудием 205. В еще одном варианте осуществления электронный блок 105 управления может генерировать указание, когда разница больше, чем пороговое значение (блок 540). В частности, электронный блок 105 управления может передавать сигнал в интерфейс 125 рабочего транспортного средства, который генерирует уведомление для оператора рабочего транспортного средства 200. Уведомление может предупреждать оператора, что орудие 205 находится за пределами предварительно определенной дальности, которая может быть отрегулирована посредством установки различных значений для порогового значения. Как и раньше, оператор может затем вручную изменять положение орудия 205.
Таким образом, варианты осуществления, среди прочего, предоставляют систему и способ определения положения орудия на рабочем транспортном средстве с использованием сверхширокополосного измерения расстояния. Различные признаки и преимущества изобретения изложены в нижеследующей формуле изобретения.
Шарнирный узел рамы, имеющий две оси поворота
Система активного прижимного усилия орудия с автоматическим блокированием нагнетательной системы гидропотока трактора
Устройство распределения продукта, система и способ автоматической калибровки измерителя
Способ и система для определения коррекций часов
Коллектор и узел распределительного коллектора для захваченного воздухом материала
Орудие с активным прижимным усилием боковины и последовательность поднятия боковины
Высевающая секция для посевной машины, имеющая дозатор семян с обращенным вниз дозирующим элементом и системой доставки семян
Рулонный пресс-подборщик с боковыми направляющими для прессовального ремня
Крышка трубопровода
Силовой агрегат, содержащий трехскоростную трансмиссию
Система и способ мониторинга рабочего участка
Система и способ мониторинга рабочего участка

