Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КОРРЕКЦИЙ ЧАСОВ
Вид РИД
Изобретение
По этой заявке испрашивается приоритет на основании предварительной заявки на патент США № 61/432646, поданной 14 января 2011 г., под названием METHOD AND SYSTEM FOR DETERMINING CLOCK CORRECTIONS, согласно 35 U.S.C. 119(e).
Область техники, к которой относится изобретение
Это изобретение относится к способу и системе для определения коррекций часов для спутниковой навигационной системы.
Уровень техники
Приемник определения местоположения, например приемник Глобальной навигационной спутниковой системы (GNSS), может оценивать положение и скорость объекта или транспортного средства.
Приемник определения местоположения может выводить неточные положения и скорости вследствие неточности данных часов от одного или более спутников. Системы аугментации GNSS, которые распространяют коррекции для погрешностей GNSS, снабжают пользовательские приемники информацией, которая обеспечивает более точную навигацию, чем возможно в другом случае. Такие системы аугментации обычно включают в себя коррекции часов и орбиты в передаваемую информацию часов и орбиты спутника.
Система аугментации GNSS обычно включает в себя сеть приемников в известных местоположениях. Эти приемники передают информацию в центр обработки, где информация объединяется и вычисляются коррекции GNSS. Поскольку каждый приемник в сети системы аугментации обычно имеет собственные локальные часы, которые не синхронизированы с другими часами сети, необходимо иметь единый источник времени, с которым может сверяться вся информация от сетевых приемников.
Согласно подходу уровня техники, на одном или более сетевых приемниках точные часы (обычно атомные часы, внешние по отношению к сетевому приемнику) используются для подачи сигналов хронирования на сетевой приемник. Такой сетевой приемник, таким образом, имеет очень стабильный эталон времени, и этот сетевой приемник можно использовать как единый источник времени, с которым может сверяться информация от других сетевых приемников. Вследствие возможного отказа точных часов или отказа линий связи между этим сетевым приемником и центром обработки обычно устанавливается несколько точных часов для повышения надежности системы. Рабочие характеристики этих точных часов обычно оцениваются и отслеживаются в реальном времени для облегчения переключения между точными часами.
На практике, этот подход уровня техники требует установки дорогостоящих атомных часов в нескольких разных местах с сетевыми приемниками. Таким образом, существует потребность в усовершенствованных экономичных способе и системе для определения коррекций часов для спутниковой навигационной системы. В частности, существует потребность в способе и системе для определения коррекций часов, которые не требуют точных часов на любом сетевом приемнике.
Сущность изобретения
В соответствии с одним вариантом осуществления изобретения способ и система для определения коррекций спутниковых часов облегчает определение точных оценок положения одним или более мобильными приемниками определения местоположения. Способ и система содержат сбор измерений псевдодальностного кода, измерений фазы несущей и данных навигационного сообщения (например, широковещательных данных погрешности часов или широковещательного отклонения хода часов) из сети стационарных приемников спутниковых сигналов, передаваемых одной или более орбитальными группировками навигационных спутников. В каждый интервал времени (например, эпоху) погрешность часов вычисляется для каждого навигационного спутника на основании собранных измерений псевдодальностного кода, измерений фазы несущей и данных навигационного сообщения. Разности погрешностей часов формируются между вычисленной погрешностью спутниковых часов и широковещательной погрешностью часов для каждого спутника. Для каждой орбитальной группировки выбирается спутник эталонных часов из навигационных спутников в этой орбитальной группировке, который имеет срединное значение разности погрешностей часов для этой орбитальной группировки спутников. Затем коррекция широковещательной погрешности часов каждого спутника в этой орбитальной группировке определяется путем суммирования функции погрешности часов спутника эталонных часов с широковещательной погрешностью часов для каждого спутника в этой орбитальной группировке (например, на поспутниковой основе в каждой орбитальной группировке). Значение коррекции в каждую эпоху или другой интервал времени (например, несколько эпох) ограничивается на основании предела параметра управления (например, где предел параметра управления меньше или приблизительно равен погрешности часов спутника эталонных часов или где предел параметра управления содержит фиксированный параметр, выраженный в единицах расстояния, поскольку решение фильтра Калмана сходится на решении для широковещательной погрешности часов).
Краткое описание чертежей
Фиг. 1 - блок-схема первого варианта осуществления системы для определения коррекций часов.
Фиг. 2 - блок-схема второго варианта осуществления системы для определения коррекций часов.
Фиг. 3 - блок-схема мобильного приемника определения местоположения в соответствии с системой, показанной на фиг. 1 или фиг. 2.
Фиг. 4 - первый пример блок-схемы операций способа для определения коррекций погрешности часов в соответствии с любым вариантом осуществления системы.
Фиг. 5 - второй пример блок-схемы операций способа для определения коррекций погрешности часов в соответствии с любым вариантом осуществления системы.
Фиг. 6 - блок-схема операций способа для определения оценки положения или оценки скорости на приемнике, который принимает коррекции погрешности часов.
Описание предпочтительного варианта осуществления изобретения
В соответствии с одним вариантом осуществления системы 11 для определения коррекций часов для спутниковой навигационной системы (например, системы GNSS) система 11 облегчает определение в реальном времени точных и плавных коррекций спутниковых часов, вносимых в широковещательные данные погрешности спутниковых часов для поддержки повышенной надежности и точности мобильных приемников 42 определения местоположения, которые могут использовать данные 44 коррекции часов в реальном времени. Способ и система вырабатывают данные 44 коррекции часов (например, коррекции погрешности часов), которые хорошо подходят для обеспечения повышенной точности и разрешения при определении положения или скорости мобильного приемника 42 определения местоположения, или соответствующего объекта, в реальном времени.
В одном варианте осуществления система 11 содержит сеть 15 приемников, которая способна осуществлять связь с центральной электронной системой 16 обработки данных по одной или более линиям 13 связи. Центральная электронная система 16 обработки данных подключена к наземному устройству 38 спутниковой связи, которое облегчает передачу данных 44 коррекции часов или других данных коррекции (например, данных коррекции положения) на один или более мобильных приемников 42 определения местоположения через удаленное устройство 40 спутниковой связи (например, спутниковое транспортное средство) на орбите над поверхностью земли. Мобильный приемник 42 определения местоположения связан с устройством 41 передачи коррекции (например, приемником коррекции спутника), который способен принимать спутниковые сигналы (например, данные 44 коррекции часов) от удаленного устройства 40 спутниковой связи. Хотя фиг. 1 иллюстрирует наземное устройство 38 спутниковой связи, удаленное устройство 40 спутниковой связи и устройство 41 передачи коррекции для передачи или распространения данных коррекции, данные коррекции или коррекция могут распространяться любым другим способом посредством электронных средств связи, телекоммуникаций, электромагнитных сигналов или беспроводной связи.
В одном варианте осуществления сеть 15 приемников содержит с первой опорной станции 10 по N-ю опорную станцию 14, где N равно любому положительному целому числу или целому числу, превышающему 2. Как показано на фиг. 1, сеть 15 приемников содержит первую опорную станцию 10, вторую опорную станцию 12 и третью опорную станцию, когда N равно, например, трем. В одном варианте осуществления сеть 15 приемников может содержать опорные станции (10, 12 и 14), которые глобально распределены в разных известных местоположениях (например, географических координатах станции), хотя возможно региональное или локальное распределение опорных станций (10, 12 и 14).
Каждая опорная станция (10, 12 и 14) содержит опорный приемник 51 в соответствующем известном или фиксированном местоположении, опорную электронную систему 53 обработки данных и передатчик или приемопередатчик 55. Каждый опорный приемник 51 принимает или детектирует одно или более из следующих: (1) измерений или данных псевдодальностного кода, (2) измерений или данных фазы несущей, (3) широковещательных данных погрешности спутниковых часов, (4) эфемеридных данных и (5) других опорных навигационных данных. Опорный приемник 51 может принимать спутниковые сигналы, несущие сигналы и кодированные сигналы от одного или более спутников Глобальной системы позиционирования (GPS), от одного или более спутников Глобальной навигационной спутниковой системы (ГЛОНАСС) или спутников обеих систем.
Система 53 обработки данных приемника может сохранять, извлекать и обрабатывать опорные навигационные данные, связанные с принятыми спутниковыми сигналами, несущими сигналами и кодированными сигналами. В одном варианте осуществления передатчик или приемопередатчик 55 каждой опорной станции (10, 12 или 14) передает на центральную электронную систему 16 обработки данных или компьютерный концентратор по одной или более линиям 13 связи одно или более из следующих данных: (1) измерений или данных псевдодальностного кода, (2) измерений или данных фазы несущей, (3) широковещательных данных погрешности спутниковых часов, (4) эфемеридных данных, (5) опорных навигационных данных и (6) производных данных, полученных анализом или обработкой любых из вышеуказанных элементов данных. Например, вышеописанные передаваемые данные могут относиться к первой орбитальной группировке навигационных спутников (например, спутников Глобальной системы позиционирования (GPS)), второй орбитальной группировке спутников (например, спутников ГЛОНАСС) или обеим.
Опорные навигационные данные может содержать одно или более из следующих элементов данных: (a) соответствующих местоположения или географических координат опорной станции каждой соответствующей опорной станции (10, 12 или 14), (b) соответствующих географических координат антенн каждого опорного приемника 51, (c) соответствующего идентификатора опорной станции каждой опорной станции (10, 12 или 14) и (d) идентификаторов спутников для соответствующих спутников, которые обеспечивают соответствующие широковещательные данные погрешности часов и соответствующие эфемеридные данные.
Линии 13 связи поддерживают передачу данных в реальном времени между опорной станцией (10, 12 или 14) и центральной электронной системой 16 обработки данных. Линии 13 связи могут содержать одно или более из следующих: сети пакетной передачи данных, сети передачи данных, виртуальной частной сети, интернет-канала передачи данных, телекоммуникационного оборудования, оборудования оптической связи, оборудования радиосвязи, оборудования СВЧ-связи, оптоволоконной линии связи, линии двухточечной СВЧ-связи, выделенного проводного соединения, многожильного кабеля, коаксиальной кабельной линии связи, оптической линии связи, линии связи или других пригодных линий связи для передачи данных в реальном времени.
Измерения или данные псевдодальностного кода могут декодироваться опорным приемником 51 из информации, которая модулирует или кодирует спутниковые сигналы, принимаемые каждым опорным приемником 51.
Данные измерений фазы несущей могут поступать из устройства измерения фазы в опорном приемнике 51, который принимает один или более несущих сигналов или данных, например, от высокочастотного каскада приемника. В одном варианте осуществления устройство измерения фазы может обеспечивать измерения фазы несущей для несущих сигналов GPS, несущих сигналов ГЛОНАСС или несущих сигналов обеих систем.
Эфемеридные данные содержат информацию об орбитальном спутнике или совокупность данных о положениях спутников относительно одного или более опорных положений на или вблизи поверхности земли в соответствии с расписанием. Эфемеридные данные могут храниться в базе данных или в одном или более файлов. Спутники могут передавать эфемеридные данные в навигационном сообщении, которое может приниматься опорным приемником 51.
В альтернативном варианте осуществления опорный приемник 51 детектирует данные фазы несущей или измерения фазы несущей, связанные с одним или более несущими сигналами; опорная система 53 обработки данных на опорной станции (10, 12 или 14) определяет начальное решение неопределенности фазы несущей или решение неопределенности фазы несущей, установленное для множественных спутниковых сигналов, принятых на опорном приемнике 51. Опорная система 53 обработки данных принимает данные фазы несущей, и начальное решение неопределенности корректирует их с использованием известного или фиксированного местоположения опорного приемника 51 для определения расширенного решения неопределенности. В одном примере скорректированные данные фазы несущей содержат оцененную фазу несущей и расширенное решение неопределенности или другие данные, полученные из них. В свою очередь, скорректированные данные фазы несущей или другие данные коррекции передаются посредством беспроводного сигнала или электромагнитного сигнала в центральную систему 16 обработки данных.
В одном варианте осуществления центральная электронная система 16 обработки данных содержит центральный концентратор одного или более компьютеров. Центральная электронная система 16 обработки данных содержит процессор 18 данных, устройство 22 хранения данных и интерфейс 36 связи, которые подключены к шине 20 данных. Процессор 18 данных может содержать микропроцессор, контроллер, матрицу программируемых логических устройств, специализированную интегральную схему, арифметическое логическое устройство или другое устройство, пригодное для обработки данных, осуществления математических операций на данных или осуществление булевой логики или арифметической логики на данных. Устройство 22 хранения данных может содержать электронную память, оптическое запоминающее устройство, магнитное запоминающее устройство или другое устройство, способное сохранять и извлекать данные. Как показано на фиг. 1, устройство 22 хранения данных сохраняет, поддерживает или взаимодействует с одним или более из следующих модулей: модулем 24 сбора данных, модулем 26 оценивания параметров, главным предсказательным фильтром 27, модулем 28 разности хода часов, модулем 30 выбора опорного спутника, модулем 32 коррекции часов и модулем 34 связи. Любой из вышеперечисленных модулей (24, 26, 27, 28, 30, 32 и 34) в устройстве 22 хранения данных может содержать программный модуль, электронный модуль, программные инструкции или аппаратный или электронный модуль для осуществления эквивалентных программных инструкций. Если любой из вышеперечисленных модулей содержит программные инструкции или программы, эти программные инструкции или программы, реализованные программными средствами, могут храниться в устройстве 22 хранения данных, на оптическом носителе, магнитном носителе или другом носителе, который является энергонезависимым или, по существу, постоянным.
В одном варианте осуществления модуль 24 сбора данных обеспечивает программные инструкции или способен к осуществлению сбора, организации и контроля обработки измерений или данных псевдодальностного кода, измерений или данных фазы несущей и данных навигационного сообщения (например, включающих в себя эфемериды и широковещательные данные погрешности спутниковых часов), принятых сетью 15 приемников, которые принимают сигналы на множественных частотах, передаваемых одной или более орбитальными группировками навигационных спутников. Орбитальная группировка навигационных спутников может означать орбитальную группировку GPS, орбитальную группировку ГЛОНАСС или, например, другие орбитальные группировки. В одном варианте осуществления модуль 24 сбора данных отслеживает вышеозначенную информацию в базе данных, электронной таблице, файле (например, инвертированном файле) или другой структуре данных, которая позволяет идентифицировать, организовывать или сортировать опорные данные с помощью идентификатора опорной станции или географических координат опорной станции (10, 12, 14).
Модуль 26 оценивания параметров обеспечивает программные инструкции или способен к осуществлению вычисления или определения вычисленных данных погрешности спутниковых часов (например, данных состояния часов) на поэпоховой основе для каждого спутника на основании измерений или данных псевдодальностного кода, измерений или данных фазы несущей, соответствующих известных местоположений опорных станций (или опорных приемников) и широковещательных данных погрешности спутниковых часов. В одной конфигурации модуль 26 оценивания параметров может вычислять или определять вычисленную погрешность спутниковых часов на основании данных навигационного сообщения (например, которые включают в себя широковещательные данные погрешности спутниковых часов) помимо измерений или данных псевдодальностного кода, измерений или данных фазы несущей, соответствующих известных местоположений опорных станций (или опорных приемников). В одном варианте осуществления модуль 26 оценивания параметров может содержать, использовать или обращаться к одному или более из следующих: центрального модуля оценивания орбиты, центрального модуля оценивания часов, предсказательного фильтра, фильтра уменьшения ошибок и фильтра Калмана.
Эпоху можно задать одним или более из следующих: времени начала, времени окончания, длительности, или интервала, или дискретного момента, когда опорный приемник 51 делает снимок входящего радиочастотного или микроволнового сигнала определения дальности и генерирует измерение псевдодальности/фазы несущей. Текущая эпоха означает самый недавний момент, когда генерируется самое позднее измерение (например, измерение GPS).
Модуль 28 разности хода часов обеспечивает программные инструкции или способен к осуществлению формирования или определения разностей погрешностей часов между парами вычисленных данных погрешности спутниковых часов и широковещательных данных часов для каждого спутника в одной или более орбитальных группировках. В одном варианте осуществления для каждого спутника, принятого опорным приемником 51, вычисленная погрешность спутниковых часов определяется или оцененивается на основании измерений фазы несущей, измерений псевдодальностного кода, соответствующих известных фиксированных местоположений опорных станций (10, 12 и 14) и широковещательной погрешности спутниковых часов. Модуль 28 разности хода часов может вычислять первый набор вычисленных данных погрешности спутниковых часов в отношении орбитальной группировки GPS и второй набор вычисленных данных погрешности спутниковых часов для орбитальной группировки ГЛОНАСС или обеих.
В целом, абсолютные часы каждого спутника и приемника определения местоположения являются ненаблюдаемыми в каждой Глобальной навигационной спутниковой системе (GNSS) (например, GPS и ГЛОНАСС) для определения орбиты и часов. По меньшей мере одно дополнительное ограничение, например измерение псевдокода или измерение фазы несущей для каждой системы Глобальной навигационной спутниковой системы (GNSS), требуется для точного определения погрешности спутниковых часов и погрешности часов приемника.
В одном варианте осуществления широковещательные данные погрешности спутниковых часов может представлять смещение хода часов, отклонение хода часов или дифференциальные данные часов в отношении системных часов соответствующей орбитальной группировки (например, системных часов GPS или системных часов ГЛОНАСС). Модуль 28 разности хода часов или система 16 обработки данных определяет разности погрешностей часов или данные погрешности между вычисленными данными погрешности спутниковых часов и широковещательными данными часов для каждого спутника в каждой орбитальной группировке на поспутниковой основе или иначе ограничивается конкретными поднаборами спутников в каждой орбитальной группировке. Разности погрешностей часов или данные погрешности могут храниться в одном или более массивах или матрицах в устройстве 22 хранения данных, где каждый массив соответствует конкретной орбитальной группировке. Хотя каждый массив или матрица может охватывать все спутники в орбитальной группировке, матрица может ограничиваться поднабором каждой орбитальной группировки для сокращения времени обработки данных или времени вычисления (например, процессора 18 данных), необходимости для определения и сбора вычисленных данных погрешности спутниковых часов или разностей погрешностей часов в центральной электронной системе 16 обработки данных для достижения реактивности в реальном времени при передаче данных коррекции (например, коррекций погрешности часов) конечному пользователю мобильного приемника 42 определения местоположения. С этой целью некоторые базовые спутники, например спутник AMC-1 или другие спутники, которые имеют историческую точность данных спутниковых часов в пределах 10 наносекунд точности в отношении системного времени орбитальной группировки (например, системного времени GPS), могут быть включены в поднабор спутников в каждой орбитальной группировке, для которых вычисляются разности или данные погрешности.
Модуль 30 выбора опорного спутника обеспечивает программные инструкции или способен к осуществлению выбора (например, на динамической поэпоховой основе) одного конкретного спутника для каждой орбитальной группировки в качестве спутника эталонных часов для каждой орбитальной группировки, где спутник эталонных часов имеет срединное значение сформированных ранее разностей для каждой орбитальной группировки спутников (например, GPS и ГЛОНАСС) для конкретной соответствующей эпохи. Например, срединное значение можно использовать вместо среднего значения для исключения любого ошибочного влияния или несогласованного влияния сильно отличающихся данных спутниковых часов на результирующие данные погрешности или разности. Если бы использовалось среднее значение, результирующие данные погрешности могли бы неправильно смещаться сильно отличающимися данными спутниковых часов, полученными от неправильно функционирующих спутниковых часов.
Модуль 32 коррекции часов обеспечивает программные инструкции или способен к осуществлению вычисления или определения коррекции (например, данных 44 коррекции часов или данных коррекции спутниковых часов) в отношении широковещательных данных погрешности спутниковых часов путем прибавления к или регулировки широковещательных данных спутниковых часов для каждых спутниковых часов в отдельности. Например, модуль 32 коррекции часов адаптирован для определения коррекций погрешности часов путем прибавления функции (например, математической функции, линейной алгебраической функции или матричного выражения) разности хода часов или данных погрешности, связанных с выбранным опорным спутником, к каждой широковещательной погрешности спутниковых часов других спутников в орбитальной группировке. В одном варианте осуществления модуль 32 коррекции часов содержит одно или более из следующих: предсказательного фильтра, фильтра уменьшения ошибок и фильтра Калмана. В другом варианте осуществления модуль 32 коррекции часов и модуль 26 оценивания параметров могут обращаться к, использовать, совместно использовать или реализовывать главный предсказательный фильтр 27. Главный предсказательный фильтр 27 содержит предсказательный фильтр, фильтр снижения погрешности или фильтр Калмана.
Модуль 34 связи обеспечивает программные инструкции или способен к осуществлению поддержки распространения вычисленных данных 44 коррекции часов на пользовательские приемники (например, через спутниковую систему связи, проиллюстрированную на фиг. 1, или через систему беспроводной связи).
В одном варианте осуществления один или более экземпляров точных спутниковых часов (например, атомных часов) на каждом спутнике на орбите используются как широковещательные спутниковые часы, как потенциальные главные спутниковые часы или как источник данных спутниковых часов. Один или более экземпляров спутниковых часов можно выбирать в качестве источника данных часов для данных коррекции или решения положения мобильного приемника 42 определения местоположения. Например, в качестве источника данных часов можно выбирать спутниковые часы GPS, спутниковые часы ГЛОНАСС или гибрид спутниковых часов GPS и спутниковых часов ГЛОНАСС. В первом примере данные спутниковых часов, которые используются в данных 44 коррекции часов, содержат срединное значение спутниковых часов GPS по всей орбитальной группировке GPS или существенную часть (например, преобладающий или статистически значимый размер выборки) орбитальной группировки, которая обслуживает большую территорию. Во втором примере данные спутниковых часов, которые используются в данных 44 коррекции часов, содержат срединное значение спутниковых часов ГЛОНАСС по всей орбитальной группировке ГЛОНАСС или существенную часть (например, преобладающий или статистически значимый размер выборки) орбитальной группировки, которая обслуживает большую территорию. В третьем примере данные спутниковых часов, которые используются в данных коррекции часов, содержат срединное значение спутниковых часов GPS по всей орбитальной группировке GPS и срединное значение спутниковых часов ГЛОНАСС по всей орбитальной группировке ГЛОНАСС.
В соответствии с одним вариантом осуществления система и способ для адаптивных широковещательных главных часов хорошо подходит для устранения внешнего ввода точной тактовой частоты (например, атомных часов приемника или атомного опорного генератора на опорном приемнике 51) и уменьшения сложности ежедневных операций и затрат на разработку глобальной или широкомасштабной системы дифференциальной коррекции. Используемый здесь термин «главные часы» относится к часам спутника эталонных часов для орбитальной группировки GPS или орбитальной группировки ГЛОНАСС, которые имеют срединное значение разностей погрешностей часов для любой эпохи, благодаря чему главные часы могут меняться от эпохи к эпохе. Поскольку, согласно настоящим способу и системе, существует очень большое количество спутников в качестве источника возможных данных часов, достоверность данных часов можно дополнительно повысить. Другое преимущество системы и способа состоит в облегчении коррекций часов или данных 44 коррекции часов, которые имеют нулевые среднестатистические значения (или, например, среднестатистические значения, близкие к нулю) и скорость дрейфа коррекции, которую можно ограничить в соответствии с заранее установленными или заранее заданными ограничениями.
Система 111, показанная на фиг. 2, аналогична системе 11, показанной на фиг. 1, за исключением того, что в системе 111, показанной на фиг. 2, наземное устройство 38 спутниковой связи и удаленное устройство 40 спутниковой связи заменены беспроводной базовой станцией 138. Беспроводная базовая станция 138 может представлять, например, часть сети беспроводной связи. Дополнительно, мобильный приемник 42 определения местоположения связан с устройством 141 передачи коррекции, которое содержит приемопередатчик или устройство беспроводной связи (например, сотовое, устройство Глобальной системы мобильной связи (GSM), устройство, работающее по принципу множественного доступа с кодовым разделением (CDMA) или другое устройство беспроводной связи) для осуществления связи с беспроводной базовой станцией 138. Сходные ссылочные позиции на фиг. 1 и фиг. 2 указывают сходные элементы.
Согласно фиг. 2, данные 44 коррекции часов (например, коррекции погрешности часов) передаются и делаются доступными одному или более мобильным приемникам 42 определения местоположения, связанным с соответствующими устройствами 141 передачи коррекции в зоне покрытия беспроводной базовой станции 138 или сети беспроводных базовых станций 138.
Фиг. 3 иллюстрирует пример мобильного приемника 42 определения местоположения, который можно использовать согласно варианту осуществления, представленному на фиг. 1 или фиг. 2. Мобильный приемник 42 определения местоположения содержит высокочастотный каскад 302 приемника, подключенный к входу аналого-цифрового преобразователя 306. Выход (например, цифрового низкочастотного сигнала) аналого-цифрового преобразователя 306 подключен к электронной системе 308 обработки данных приемника.
Электронная система 308 обработки данных приемника содержит процессор 310 данных приемника, устройство 312 хранения данных приемника, шину 324 данных приемника, порт 322 данных, декодер 320 и устройство 304 измерения фазы. Процессор 310 данных приемника, устройство 312 хранения данных приемника, порт 322 данных, устройство 304 измерения фазы и декодер 320 подключены к шине 324 данных приемника для поддержки связи между вышеупомянутыми компонентами электронной системы 308 обработки данных приемника.
Процессор 310 данных приемника может содержать микропроцессор, контроллер, матрицу программируемых логических устройств, специализированную интегральную схему, арифметическое логическое устройство, логическое устройство, электронное устройство обработки данных или другое устройство для выполнения программного обеспечения, логических, арифметических или программных инструкций.
Устройство 312 хранения данных приемника содержит электронную память, оптическое запоминающее устройство, магнитное запоминающее устройство или другое запоминающее устройство. Устройство 312 хранения данных приемника содержит кинематическую машину 314 реального времени, предсказательный фильтр 316 (например, фильтр Калмана) и модуль 318 оценивания положения.
Приемник 42 определения местоположения связан с устройством (41 или 141) передачи коррекции. Устройство (41 или 141) передачи коррекции может быть встроено в приемник 42 определения местоположения или может осуществлять связь с приемником определения местоположения через порт 322 данных. Устройство (41 или 141) передачи коррекции принимает данные коррекции (например, данные коррекции погрешности часов (т.е. 44) и/или опорные данные коррекции фазы несущей) от центральной электронной системы 16 обработки данных через одно или более промежуточных устройств беспроводной или спутниковой связи (например, 38, 40 на фиг. 1 или 138 на фиг. 2).
Высокочастотный каскад 302 приемника может содержать любую пригодную схему для приема спутниковых сигналов, передаваемых одним или более спутниками (например, навигационными спутниками). Высокочастотный каскад 302 приемника может быть способен принимать, например, сигналы спутников GPS и ГЛОНАСС. Высокочастотный каскад 302 приемника может содержать приемник системы расширенного спектра или приемник системы множественного доступа с кодовым разделением (CDMA), который способен принимать множественные несущие, передаваемые одним или более спутниками в орбитальной группировке спутников. Например, высокочастотный каскад 302 приемника может содержать предусилитель или усилитель для усиления спутниковых сигналов, смеситель и опорный генератор, где вход усилителя подключен к антенне, выход усилителя подключен к одному входу смесителя, опорный генератор подключен к другому входу смесителя и выход смесителя подключен к системе 308 обработки данных приемника.
В одном варианте осуществления аналого-цифровой преобразователь 306 обеспечивает интерфейс между высокочастотным каскадом 302 приемника и электронной системой 308 обработки данных приемника. Аналого-цифровой преобразователь 306 преобразует аналоговые измерения фазы в цифровые данные измерений фазы несущей, которые могут обрабатываться или манипулироваться электронной системой 308 обработки данных приемника.
Декодер 320 определяет измерения псевдодальностного кода и передает измерения псевдодальностного кода на систему 308 электронной обработки приемника. В одном варианте осуществления декодер 320 содержит демодулятор или другое устройство для демодуляции псевдослучайного шумового кода (например, кода грубого сопровождения (C/A) или другого более точного гражданского или военного кодирования), который модулирует одну или более несущих. Например, декодер 320 может содержать группу корреляторов 351 (например, по одному коррелятору на канал GPS и по одному коррелятору на канал ГЛОНАСС), где каждый коррелятор 351 подключен к генератору 390 псевдослучайного шумового кода для обеспечения демодулированных синфазной (I) и квадратурной (Q) компонент сигнала (например, амплитуды и фазы или векторов). Для GPS несущий сигнал L1 модулируется кодом грубого сопровождения (C/A) и зашифрованным точным кодом P(Y), тогда как сигнал L2 модулируется зашифрованным кодом P(Y). В одном варианте осуществления декодер может содержать генератор кода, подключенный к входу модуля задержки, где выход модуля задержки подключен к коррелятору для измерения корреляции между опорным псевдослучайным шумовым кодом, который может задерживаться на известные приращения модулем задержки, и псевдослучайным шумовым кодом, принятым от высокочастотного каскада 302 приемника. Декодер 320 может также облегчать декодирование навигационной информации, которая модулирует несущий сигнал, например эфемеридные данные.
Устройство 304 измерения фазы содержит любое устройство, интегральную схему, электронный модуль или процессор данных для измерения фазы несущего сигнала. В одной конфигурации устройство 304 измерения фазы содержит генератор сигнала, модуль фазовой задержки, подключенный к первому коррелятору и второму коррелятору. Устройство измерения фазы измеряет или оценивает наблюдаемую фазу одного или более несущих сигналов, обеспечиваемых высокочастотным каскадом 302 приемника. Измеренную фазу можно выразить целым числом длин волны несущего сигнала, дробным числом длин волны несущего сигнала и/или градусами несущего сигнала.
Устройство 304 измерения фазы может определять одно или более из следующих: (1) первой измеренной фазовой компоненты, выражаемой дробным числом длин волны первого несущего сигнала, второго несущего сигнала или обоих, и (2) второй измеренной фазовой компоненты, выражаемой целым числом длин волны первого несущего сигнала, второго несущего сигнала или обоих. Последнюю, вторую измеренную фазовую компоненту можно определять с помощью счетчика (например, счетчика переходов через нуль), который отсчитывает переходы принятого, реконструированного или обработанного несущего сигнала, который пересекается с осью X в начале отсчета величины (например, 0 напряжение) во временной области, где X представляет время и ось Y представляет величину несущего сигнала. Однако устройство 304 измерения фазы опирается на дополнительную обработку в системе 308 обработки данных приемника для определения или разрешения неопределенности, выражающейся целым числом периодов, которая может приводить к ошибке или отклонению второй измеренной фазовой компоненты на целое число длин волны (например, для оценивания расстояния или дальности между соответствующим спутником и приемником определения местоположения). Устройство 304 измерения фазы определяет и передает данные измерений фазы несущей на систему 308 электронной обработки приемника.
Кинематическая машина 314 реального времени, предсказательный фильтр 316 и модуль 318 оценивания положения могут осуществлять связь друг с другом. Кинематическая машина 314 реального времени, предсказательный фильтр 316 и модуль 318 оценивания положения могут осуществлять связь друг с другом по логическим каналам данных, физическим каналам данных или каналам обоих типов. Логический канал данных означает виртуальный канал данных или передачу данных между программными модулями или, например, между одной или более программами, реализованными программными средствами. Физический канал данных означает линию связи или одну или более шин 324 данных приемника, которые поддерживают, например, передачу данных, сигналов логических уровней, электрических сигналов или электромагнитных сигналов.
В одном варианте осуществления кинематическая машина 314 реального времени содержит поисковую машину или другие программные инструкции для поиска или определения наборов решений целочисленной неопределенности для фазы одного или более несущих сигналов, принятых от множественных спутников. Кинематическая машина 314 может искать данные фазы несущей, обеспечиваемые, например, устройством 304 измерения фазы. Наборы решений целочисленной неопределенности относятся к фазовым неопределенностям, выражающимся целым числом периодов, в принятой фазе несущей принятых несущих сигналов (например, сигнала L1 на частоте 1.57542 ГГц, сигнала L2 на частоте 1.22760 ГГц для GPS или аналогичных сигналов), передаваемых, например, одним или более спутниками. Кинематическая машина 314 или ее поисковая машина может использовать методы наименьших квадратов или калмановой фильтрации для сужения пространства поиска или достижения одного или более наборов решений неопределенности для фазовых неопределенностей, выражающихся целым числом периодов, несущих сигналов, передаваемых со спутников.
В одной конфигурации предсказательный фильтр 316 (например, фильтр Калмана) облегчает поиск поисковой машине для более эффективного, быстрого или точного достижения наборов решений неопределенности для фазовых неопределенностей, выражающихся целым числом периодов, несущих сигналов, передаваемых со спутников. В альтернативном варианте осуществления альтернативные непоисковые методы (например, обработку широкополосных комбинаций фаз несущих и данных) можно использовать для разрешения наборов решений целочисленной неопределенности фазы несущей.
Модуль 318 оценивания содержит процессор 310 данных приемника или другое устройство обработки данных для оценивания позиции, скорости, положения или любых из вышеперечисленных атрибутов объекта или транспортного средства, связанного с приемником 42 определения местоположения. Модуль 318 оценивания подключен к или осуществляет связь с кинематической машиной 314 реального времени и процессором 310 данных приемника. Определив набор решений целочисленной неопределенности, модуль 318 оценивания положения или приемник 42 определения местоположения может использовать данные измерений фазы несущей для обеспечения точной оценки расстояния или дальности между каждым спутником и приемником определения местоположения на основании известной скорости распространения (т.е. скорости света). В свою очередь, дальности между тремя или более спутниками и приемником определения местоположения можно использовать для оценивания позиции, скорости или положения приемника 42.
Предсказательный фильтр 316 содержит фильтр снижения погрешности, фильтр Калмана или его разновидность для снижения или уменьшения погрешностей, например погрешности измерения. Фильтр Калмана может содержать устройство или схему предсказательной фильтрации, которое использует суммирование сигналов, задержку и обратную связь для обработки данных и компенсации эффектов шума и неопределенности в измеренных данных или в чем-то другом. Переустановка или переинициализация может означать то же самое, что и переинициализация состояний фильтра снижения погрешности или фильтра Калмана.
Модуль 318 оценивания положения содержит электронный модуль, программный модуль или оба модуля для оценивания положения объекта или транспортного средства, связанного с приемником определения местоположения. Модуль оценивания положения может использовать один или более из следующих источников данных для определения оцененного положения или положения антенны приемника определения местоположения или связанного с ним объекта или транспортного средства: декодированного псевдослучайного шумового кода, данных измерений фазы несущей, зашифрованного точного кода (например, кода P(Y)), кода грубого сопровождения, навигационной информации и данных неопределенности фазы, выражающейся целым числом периодов, и данные фазы несущей опорной станции, где данные фазы несущей опорной станции могут интегрироваться в данные неопределенности фазы, выражающейся целым числом периодов.
Предсказательный фильтр 316 может содержать фильтр уменьшения ошибок, который принимает входные данные от кинематической машины 314 реального времени, где входные данные содержат данные решения неопределенности (например, набор решений целочисленной неопределенности) для соответствующих данных измерений фазы несущей. В одном варианте осуществления опорный приемник 51, показанный на фиг. 1 и фиг. 2, может содержать, по существу, те же элементы, что и мобильный приемник 42 определения местоположения, показанный на фиг. 3, за исключением того, что опорный приемник 51 не подключен к устройству (41 или 141) передачи коррекции.
На Фиг. 4 показан первый пример блок-схемы операций способа для определения данных 44 коррекции часов. Способ, представленный на фиг. 4, начинается с этапа S400.
На этапе S400 модуль 24 сбора данных или центральная электронная система 16 обработки данных собирает измерения псевдодальностного кода, измерения фазы несущей и широковещательные погрешности часов, принятые сетью 15 приемников опорных станций (например, 10, 12 и 14). Например, сеть 15 приемников опорных станций содержит стационарные опорные приемники 51, расположенные в соответствующих известных местоположениях или с известными географическими координатами, где опорные приемники 51 принимают сигналы на множественных частотах (например, множественных несущих частотах), передаваемых одной или более орбитальными группировками навигационных спутников. Одна или более орбитальных группировок может содержать орбитальную группировку GPS, орбитальную группировку ГЛОНАСС или другую орбитальную группировку навигационных спутников. Для орбитальной группировки спутников GPS множественные частоты могут содержать, например, несущую частоту L1 и несущую частоту L2. Для орбитальной группировки спутников ГЛОНАСС множественные несущие частоты назначаются разным спутникам.
В опорном приемнике 51 устройство измерения фазы или система 53 обработки данных приемника измеряет фазы несущих соответствующих несущих сигналов, принятых опорным приемником 51. Измерения фазы несущей могут включать в себя, например, данные измерений фазы несущей GPS и данные измерений фазы несущей ГЛОНАСС. Декодер в опорном приемнике 51 может декодировать передаваемые эфемеридные данные, широковещательные погрешности спутниковых часов и другие навигационные данные, которые передаются на или которые модулирует по меньшей мере один из несущих сигналов одного или более спутниковых сигналов. В одной конфигурации измерения фазы несущей, измерения псевдодальностного кода и данные навигационного сообщения передаются из сети 15 приемников в центральную систему 16 обработки данных по одной или более линиям 13 связи.
Каждый спутник обычно рассылает эфемеридные данные и данные погрешности спутниковых часов (например, дифференциальные данные часов в отношении системного времени GPS или системного времени ГЛОНАСС для конкретного спутника). Широковещательные данные часов представляют собой набор подобранных коэффициентов многочлена второго порядка, используемых приемником для коррекции измерений псевдодальности и фазы несущей приемника определения местоположения (например, опорного приемника 51). Каждый навигационный спутник передает эфемеридные данные своей собственной орбиты и показания спутниковых часов. Точность широковещательных погрешностей спутниковых часов обычно составляет, например, порядка 2-3 метров относительно времени GPS.
На этапе S402 в каждый интервал времени (например, эпоху), модуль 26 оценивания параметров или центральная электронная система 16 обработки данных оценивает вычисленные данные погрешности спутниковых часов для каждого спутника на основании одного или более из следующих собранных данных: измерений псевдодальностного кода сети 15 приемников для каждого спутника, измерений фазы несущей сети 15 приемников для каждого спутника, соответствующих известных местоположений стационарных опорных приемников 51 в сети 15 приемников и широковещательных погрешностей спутниковых часов.
Этап S402 может осуществляться в соответствии с различными методами, которые можно применять попеременно или совокупно. В соответствии с первым методом в каждый интервал времени (например, эпоху) модуль 26 оценивания параметров или центральная электронная система 16 обработки данных оценивает данные погрешности спутниковых часов для каждого спутника, который активен или правильно функционирует в одной или более орбитальных группировках (например, GPS, ГЛОНАСС или обеих), на основании измерений псевдодальностного кода, измерений фазы несущей, соответствующих известных местоположений стационарных приемников и широковещательных погрешностей спутниковых часов или данных навигационного сообщения (например, которое включает в себя широковещательные погрешности спутниковых часов).
В соответствии со вторым методом, если спутник обеспечивает искаженные или ненадежные спутниковые сигналы или искаженные или ненадежные данные в течение определенного периода времени, модуль 26 оценивания параметров или центральная система 16 обработки данных может приостанавливать обработку данных погрешности спутниковых часов для дефектного или подозрительного спутника в течение периода времени, пока сигнал, принятый от спутника, не будет иметь достаточное качество сигнала или уровень надежности принятых данных.
В соответствии с третьим методом модуль 26 оценивания параметров или центральная электронная система 16 обработки данных использует одинарную разностную процедуру или другую процедуру для определения вычисленных данных погрешности спутниковых часов для каждого соответствующего спутника в одной или более орбитальных группировках (например, орбитальных группировках GPS или ГЛОНАСС). Например, в одном варианте осуществления каждая возможная комбинация или перестановка пары разных приемников и одного спутника, которая доступна (например, принята с адекватной интенсивностью сигнала или качеством сигнала на любой паре опорных приемников 51) используется для оценивания погрешности или смещения часов (например, вычисленная погрешность спутниковых часов) для каждого спутника в конкретной орбитальной группировке в соответствии с повторным применением одинарной разности между измерениями фазы несущей опорных приемников 51. Вычисленные данные погрешности спутниковых часов можно выразить как дифференциальное время или смещение относительно системного времени GPS или системного времени ГЛОНАСС.
В соответствии с четвертым методом модуль 28 разности хода часов или центральная электронная система 16 обработки данных использует двойную разностную процедуру или другую процедуру для определения вычисленных данных погрешности спутниковых часов. Например, двойная разностная процедура означает разность между измерениями фазы несущей от двух опорных приемников 51 (например, в известных фиксированных местоположениях или географических координатах), которые, по существу, одновременно принимают несущие сигналы от одной и той же пары двух спутников для определения вычисленных данных погрешности спутниковых часов со сниженной погрешностью или смещением часов. Например, в одном варианте осуществления каждая возможная комбинация или перестановка пары разных приемников и пары спутников, которая доступна (например, принята с адекватной интенсивностью сигнала или качеством сигнала на любой паре опорных приемников 51), используется для оценивания погрешности или смещения часов для каждого спутника в конкретной орбитальной группировке в соответствии с повторным применением двойной разности между измерениями фазы несущей опорных приемников 51. На практике двойную разность можно определять взятием второй разности двух определений одинарной разности. Вычисленные данные погрешности спутниковых часов можно выразить как дифференциальное время или смещение относительно системного времени GPS или системного времени ГЛОНАСС.
На этапе S406 модуль 28 разности хода часов или центральная электронная система 16 обработки данных формирует или определяет разности погрешностей часов (например, дифференциальные данные или дифференциальные данные погрешности часов) между соответствующими парами вычисленных данных погрешности спутниковых часов и соответствующих широковещательных данных часов для каждого спутника. Например, вычисленные данные погрешности спутниковых часов представляют собой данные спутниковых часов, которые согласуются с известным фиксированным местоположением опорного приемника 51 на конкретной опорной станции (например, 10, 12 или 14), и измерения фазы несущей конкретной опорной станции (например, 10, 12 или 14) для определенного спутника.
Широковещательные данные часов обеспечиваются посредством или выводятся из точных часов (например, рубидиевых, цезиевых или атомных часов), установленных на каждом спутнике. В одном варианте осуществления широковещательные данные часов содержат дифференциальные данные часов или данные смещения часов относительно системных часов орбитальной группировки. В другом варианте осуществления широковещательные данные часов представляют передаваемые данные спутниковых часов (и соответствующие эфемеридные данные).
Этап S406 может выполняться в соответствии с различными методами, которые можно применять по отдельности или совокупно.
В соответствии с первым методом модуль 28 разности хода часов, центральная электронная система 16 обработки данных или главный предсказательный фильтр 27 (например, фильтр Калмана) в системе 16 обработки данных использует одно или более из следующих для нахождения разности погрешностей часов на поспутниковой основе для одной или более орбитальных группировок и для каждой последующей эпохи: (1) соответствующих вычисленных данных погрешности спутниковых часов для одного или более спутников в общей орбитальной группировке, (2) соответствующих широковещательных данных погрешности спутниковых часов для одного или более спутников в общей орбитальной группировке и (3) соответствующих широковещательных данных погрешности спутниковых часов для общей орбитальной группировки, отрегулированных или скорректированных на основании сопутствующих эфемеридных данных для конкретного спутника. Общая орбитальная группировка означает ту же самую орбитальную группировку спутников, которая может содержать, например, орбитальную группировку GPS или орбитальную группировку ГЛОНАСС.
В соответствии со вторым методом модуль 28 разности хода часов или система 16 обработки данных определяет разности или данные погрешности между вычисленными данными погрешности спутниковых часов и широковещательными данными погрешности часов для каждого спутника в каждой орбитальной группировке на поспутниковой основе или, иначе, ограничивается конкретными поднаборами спутников в каждой орбитальной группировке. Разности или данные погрешности могут храниться в одном или более массивах или матрицах в устройстве 22 хранения данных, где каждый массив соответствует конкретной орбитальной группировке.
На этапе S408 модуль 30 выбора опорного спутника или электронная система 16 обработки данных выбирает один из спутников в каждой орбитальной группировке в качестве спутника эталонных часов для этой орбитальной группировки, где спутник эталонных часов имеет срединное значение разностей погрешностей часов (например, из этапа S406) для этой орбитальной группировки. В первом примере для осуществления этапа S408 модуль 30 выбора опорного спутника или электронная система 16 обработки данных выбирает один из спутников в орбитальной группировке GPS в качестве спутника эталонных часов для орбитальной группировки GPS, где спутник эталонных часов имеет срединное значение дифференциальных данных или данных погрешности часов для орбитальной группировки GPS. Во втором примере для осуществления этапа S408 модуль 30 выбора опорного спутника или электронная система 16 обработки данных выбирает один из спутников в орбитальной группировке ГЛОНАСС в качестве спутника эталонных часов для орбитальной группировки ГЛОНАСС, где спутник эталонных часов имеет срединное значение дифференциальных данных или данных погрешности часов для орбитальной группировки ГЛОНАСС.
На этапе S410 модуль 32 коррекции часов или электронная система 16 обработки данных определяет или вычисляет коррекцию или данные коррекции в отношении широковещательных данных часов путем регулировки широковещательных данных погрешности часов каждого спутника в одной или более орбитальных группировках. Например, модуль 32 коррекции часов или система 16 обработки данных регулирует широковещательные данные погрешности часов каждого спутника путем суммирования функции погрешности часов спутника эталонных часов с широковещательной погрешностью часов для каждого спутника в одной или более орбитальных группировках, где значение коррекции для каждой эпохи или другого интервала времени (например, нескольких соседних эпох) ограничивается на основании предела параметра управления.
Этап S410 может выполняться в соответствии с различными процедурами, которые можно применять по отдельности или совокупно.
Согласно первой процедуре, предел параметра управления пропорционален погрешности часов спутника эталонных часов. Согласно второй процедуре, предел параметра управления меньше или приблизительно равен погрешности часов спутника эталонных часов. Согласно третьей процедуре, предел параметра управления содержит фиксированный параметр, выраженный в единицах расстояния, после того как главный предсказательный фильтр 27 (например, фильтр Калмана) сходится к решению для коррекции широковещательной погрешности спутниковых часов.
Согласно четвертой процедуре, для каждого соответствующего навигационного спутника в первой орбитальной группировке в одной или более орбитальных группировках вычисленная коррекция ограничивается в каждую эпоху первой погрешностью часов спутника эталонных часов первой орбитальной группировки и для каждого соответствующего навигационного спутника во второй орбитальной группировке в одной или более орбитальных группировках вычисленная коррекция ограничивается в каждую эпоху второй погрешностью часов спутника эталонных часов второй орбитальной группировки, где первая погрешность часов не зависит от второй погрешности часов. Например, первая орбитальная группировка может содержать орбитальную группировку Глобальной системы позиционирования и вторая орбитальная группировка может содержать орбитальную группировку ГЛОНАСС.
Согласно пятой процедуре, после схождения решения для коррекции широковещательной погрешности часов, вычисленная коррекция ограничивается в каждую эпоху таким образом, чтобы она не превышала пороговое значение. Согласно шестой процедуре, пороговое значение составляет приблизительно один миллиметр в единицах расстояния, или приблизительно .00333 наносекунды в эквивалентных единицах времени, где коэффициент преобразования между единицами расстояния и единицами времени равен скорости света (например, 3x108 метров в секунду). Согласно седьмой процедуре, погрешность часов спутника эталонных часов применяется в качестве дополнительного ограничения к главному предсказательному фильтру 27 (например, фильтру Калмана).
Согласно восьмой процедуре, модуль 32 коррекции часов или электронная система 16 обработки данных определяет или вычисляет данные коррекции в отношении широковещательных данных погрешности часов, ограничивая коррекцию погрешности часов в отношении широковещательной погрешности часов максимальной величиной коррекции часов для каждой эпохи или другого интервала времени (например, множественных соседних эпох), которая меньше или равна одному или более из следующих: (a) соответствующего максимального порога (например, приблизительно равного или меньшего, чем 1 миллиметр для каждой эпохи или другого интервала времени, или приблизительно равный или меньший, чем.00333 наносекунды), (b) среднеквадратической погрешности (RMS) в оценке дальности или (c) соответствующего максимального порога, выраженного в единицах расстояния или эквивалентных единицах времени, где скорость света является коэффициентом преобразования. Например, изменение за единицу времени в данных коррекции погрешности часов можно ограничивать на основании данных навигационного сообщения (например, эфемеридных данных и широковещательных данных погрешности часов), в результате чего данные коррекции погрешности часов или временные данные коррекции приемника 42 определения местоположения изменяются в меньшей степени, чем максимальное перемещение за единицу времени, что в противном случае приводило бы к нежелательным нарушениям непрерывности, расхождениям или неточностям в соответствующих оценках положения, определенных мобильным приемником 42 определения местоположения конечного пользователя.
Согласно девятой процедуре, модуль 32 коррекции часов или электронная система 16 обработки данных с регулярными или периодическими интервалами (например, эпохами) определяет следующие данные коррекции погрешности часов в отношении широковещательных данных погрешности часов, динамически регулируя в реальном времени изменение в данных погрешности часов за единицу времени, которое меньше или равно соответствующему максимальному порогу (например, меньше приблизительно 1 миллиметра для каждой эпохи или другого интервала времени или меньше приблизительно .00333 наносекунды для каждой эпохи или другого интервала времени).
Согласно десятой процедуре, этап S410 может осуществляться путем задания предела параметра управления по изменению за единицу времени в данных коррекции погрешности часов на основании срединного значения разности между парами вычисленных данных погрешности спутниковых часов и широковещательными данными погрешности часов (или эфемеридными данными часов) в конкретной орбитальной группировке навигационных спутников. Например, этап S410 может осуществляться путем ограничения коррекций погрешности часов (или максимального сдвига коррекции), определенных центральной системой 16 обработки данных или модулем 32 коррекции часов для передачи на приемник 42 определения местоположения следующим образом:
В уравнении 1 срединное значение разности хода часов GPS между вычисленными данными погрешности спутниковых часов из модуля 26 оценивания параметров и эфемеридными данными часов или широковещательными данными погрешности спутниковых часов, принятыми из сети 15 приемников, можно определить следующим образом:

где  - срединное значение разности хода часов GPS для орбитальной группировки GPS,
- срединное значение разности хода часов GPS для орбитальной группировки GPS,  - вычисленные данные погрешности часов для i-го спутника,
- вычисленные данные погрешности часов для i-го спутника,  - эфемеридные данные часов или широковещательные данные погрешности часов для i-го спутника и i - идентификатор спутника для каждого из 32 спутников GPS.
- эфемеридные данные часов или широковещательные данные погрешности часов для i-го спутника и i - идентификатор спутника для каждого из 32 спутников GPS.
В одном варианте осуществления вычисленные данные погрешности спутниковых часов и эфемеридные данные часов или широковещательные данные погрешности спутниковых часов приводятся к эквивалентным единицам и к одной и той же или, по существу, одной и той же эпохе до вычисления вышеупомянутой срединной разности хода часов GPS для орбитальной группировки GPS. Как описано далее в уравнениях 3 и 4, вышеприведенное определение срединной разности хода часов GPS может использоваться системой 16 обработки данных или ее предсказательным фильтром (например, фильтром Калмана) для определения пределов в отношении данных коррекции погрешности часов (например, коррекций погрешности часов), или максимального изменения в данных коррекции погрешности часов за единицу времени, или ее применения в мобильном приемнике 42 определения местоположения.
В уравнении 2 срединное значение разности хода часов ГЛОНАСС между вычисленными данными погрешности спутниковых часов из модуля 26 оценивания параметров и эфемеридными данными часов или широковещательными данными погрешности спутниковых часов, принятыми из сети 15 приемников, можно определить следующим образом:

где  - срединное значение разности хода часов ГЛОНАСС для орбитальной группировки ГЛОНАСС,
- срединное значение разности хода часов ГЛОНАСС для орбитальной группировки ГЛОНАСС,  - вычисленные данные погрешности спутниковых часов для j-го спутника,
- вычисленные данные погрешности спутниковых часов для j-го спутника,  - эфемеридные данные часов или широковещательные данные погрешности спутниковых часов для j-го спутника и j - идентификатор спутника для каждого из 24 спутников ГЛОНАСС.
- эфемеридные данные часов или широковещательные данные погрешности спутниковых часов для j-го спутника и j - идентификатор спутника для каждого из 24 спутников ГЛОНАСС.
В одном варианте осуществления вычисленные данные погрешности спутниковых часов и эфемеридные данные часов или широковещательные данные погрешности спутниковых часов приводятся к эквивалентным единицам и к одной и той же или, по существу, одной и той же эпохе до вычисления вышеупомянутой срединное значение разности хода часов ГЛОНАСС. Как описано далее в уравнениях 3 и 4, вышеприведенное определение срединного значения разности хода часов ГЛОНАСС может использоваться системой 16 обработки данных или ее главным предсказательным фильтром 27 (например, фильтром Калмана) для определения пределов на данных коррекции часов (например, коррекций погрешности часов), или максимального изменения в данных коррекции часов за единицу времени, или ее применения в мобильном приемнике 42 определения местоположения.
В одном варианте осуществления система 16 обработки данных, модуль 32 коррекции часов или предсказательный фильтр (например, фильтр Калмана) поддерживает или определяет, что коррекции погрешности часов являются плавными или непрерывными (например, насколько это возможно или практически осуществимо) во избежание любого возможного нарушения непрерывности коррекции или резкого изменения коррекций погрешности часов; следовательно, зависимую позицию оценок скорости на основании коррекций погрешности часов на мобильном приемнике 42 определения местоположения. Максимальное изменение показаний часов за единицу времени (например, для каждой эпохи или другого интервала времени) обновления ограничения (например, обновления до данных коррекции или обновления состояния предсказательного фильтра 27) в модуле 26 оценивания параметров, модуле 32 коррекции или предсказательном фильтре 27 (например, фильтре Калмана) в центральной системе 16 обработки данных должно ограничиваться согласно уравнению 3:

где dX - обновление состояния до оценки коррекции часов; H - матрица плана, содержащая коэффициенты чувствительности; P - дисперсионно-ковариационная матрица; dClk - погрешность часов спутника эталонных часов, Threshold - порог максимального изменения коррекции в перемещении в единицах расстояния (например, 1 мм) или в эквивалентных единицах времени; R - дисперсия применяемых данных коррекции.
На основании уравнения 3 дисперсию R или адаптивную дисперсию широковещательного сигнала главных часов от спутника GPS и ГЛОНАСС можно вычислять в обратном порядке из главного предсказательного фильтра 27 (например, фильтра Калмана) или модуля 26 оценивания параметров, затем адаптивное ограничение (например, адаптивные данные коррекции для адаптивных главных часов или опорных спутниковых часов для орбитальной группировки GPS или орбитальной группировки ГЛОНАСС) можно применять к главному предсказательному фильтру 27 или модулю 26 оценивания параметров.
Пороговый уровень TR дисперсии можно задать в соответствии со следующим уравнением 4:

где TR - пороговый уровень дисперсии для R и где другие параметры определены выше.
В одном примере, если вычисленная дисперсия R превышает пороговый уровень TR дисперсии, модуль 32 коррекции часов или главный предсказательный фильтр 27 использует вычисленную дисперсию R для ограничения или обновления состояния коррекции или данных коррекции часов (например, коррекций погрешности часов). В другом примере, если вычисленная дисперсия R меньше, чем пороговый уровень TR дисперсии, модуль 32 коррекции часов или предсказательный фильтр 27 использует пороговый уровень TR дисперсии для ограничения или обновления данных коррекции (например, коррекций погрешности часов).
В альтернативном варианте осуществления пороговый уровень TR дисперсии может содержать заранее заданный уровень дисперсии или постоянный параметр, задаваемый пользователем на основании эмпирических исследований рабочих характеристик главных часов или на основании исторической точности оценок положения мобильного приемника 42 определения местоположения. Например, пороговый уровень дисперсии может быть заранее установлен или заранее задан равным .01 м2.
Срединное значение (например, срединное значение GPS или срединное значение ГЛОНАСС) разности погрешностей часов между модулем 26 оценивания параметров (например, модуль оценивания орбиты/часов концентратора) и широковещательной погрешностью часов (например, эфемеридных часов), принятой сетью 15 приемников, повышает надежность, поскольку некоторые спутники могут иметь аномальные, сильно отличающиеся или отклоняющиеся спутниковые часы, по меньшей мере, иногда. Если ограничение, вводимое в главный предсказательный фильтр 27 (например, фильтр Калмана) или модуль 26 оценивания параметров, является слишком строгим или сильным, это может приводить к значительному скачку данных коррекции в результирующих данных коррекции. Если ограничение, вводимое в главный предсказательный фильтр 27 (например, фильтр Калмана) или модуль 26 оценивания параметров, является слишком слабым, это может приводить к медленному дрейфу в результирующих данных коррекции и большой дисперсии для оценки часов вследствие ненаблюдаемости между спутниковыми часами и часами приемника (например, опорного приемника 51). Для решения вышеизложенных технических проблем в соответствии с одним вариантом осуществления предложены адаптивные широковещательные главные часы, в которых изменение в коррекции часов ограничивается в некоторых заранее определенных или заранее заданных диапазонах.
На этапе S412 модуль 34 связи, интерфейс 36 связи или система 16 обработки данных распространяет или передает вычисленные данные 44 коррекции часов (например, коррекции погрешности часов) на мобильные приемники 42 определения местоположения (например, пользовательские приемники определения местоположения) через спутниковую, беспроводную или другую систему связи. В одном примере, согласующемся с системой, показанной на фиг. 1, система 16 обработки данных распространяет или передает данные 44 коррекции часов через наземное устройство 38 спутниковой связи, которое обеспечивает спутниковый канал восходящей линии связи с удаленным устройством 40 спутниковой связи на спутнике, совершающем орбитальное движение вокруг Земли. Удаленное устройство 40 спутниковой связи обеспечивает канал нисходящей линии связи с устройством 41 передачи коррекции для приема данных коррекции для ввода в мобильный приемник 42 определения местоположения.
В другом примере, согласующемся с системой, показанной на фиг. 2, система 16 обработки данных передает данные 44 коррекции часов посредством беспроводной базовой станции 138 на устройство 141 передачи коррекции или приемопередатчик, связанный с мобильным приемником 42 определения местоположения.
В соответствии с системой и способом оцененные параметры всех спутниковых часов и часов приемников определения местоположения можно задавать в отношении ограничения, именуемые данными главных часов или часами спутника эталонных часов для конкретной орбитальной группировки. Для глобальной системы дифференциальной коррекции в реальном времени, или широкомасштабной системы коррекции, или любого раскрытого здесь варианта осуществления системы и способа электронная система обработки данных хорошо подходит для выработки данных плавной коррекции часов (например, без переходных скачков) и строго ограниченного диапазона данных коррекции часов для сохранения ширины полосы линий связи между участками системы дифференциальной коррекции и для прогнозирования коррекций часов в реальном времени с минимальной задержкой на обработку.
На Фиг. 5 показан второй пример блок-схемы операций способа для определения данных 44 коррекции часов. Сходные ссылочные позиции на фиг. 4 и фиг. 5 указывают сходные процедуры или способы. Способ, представленный на фиг. 5, начинается с этапа S401.
На этапе S401 модуль 24 сбора данных или центральная электронная система 16 обработки данных собирает измерения псевдодальностного кода, измерения фазы несущей и данные навигационного сообщения (например, эфемеридные данные и данные часов), принятые сетью 15 приемников опорных станций (например, 10, 12 и 14). Например, сеть 15 приемников опорных станций содержит стационарные опорные приемники 51, расположенные в соответствующих известных местоположениях или с известными географическими координатами, где опорные приемники 51 принимают сигналы на множественных частотах (например, множественных несущих частотах), передаваемых одной или более орбитальными группировками навигационных спутников. Одна или более орбитальных группировок может содержать орбитальную группировку GPS, орбитальную группировку ГЛОНАСС или другую орбитальную группировку навигационных спутников. Для орбитальной группировки спутников GPS множественные частоты могут содержать, например, несущую частоту L1 и несущую частоту L2. Для орбитальной группировки спутников ГЛОНАСС множественные несущие частоты назначаются разным спутникам.
В опорном приемнике 51 устройство измерения фазы или система 53 обработки данных приемника измеряет фазы несущих соответствующих несущих сигналов, принятых опорным приемником 51. Измерения фазы несущей могут включать в себя, например, данные измерений фазы несущей GPS и данные измерений фазы несущей ГЛОНАСС. Декодер в опорном приемнике 51 может декодировать передаваемые эфемеридные данные, данные спутниковых часов и другие навигационные данные, которые передаеются на или которые модулируют по меньшей мере один из несущих сигналов одного или более спутниковых сигналов. Измерения фазы несущей, измерения псевдодальностного кода и данные навигационного сообщения передаются из сети 15 приемников в центральную систему 16 обработки данных по одной или более линиям 13 связи.
Каждый спутник обычно рассылает широковещательные эфемеридные данные и широковещательные данные погрешности спутниковых часов (например, дифференциальные данные часов в отношении системного времени GPS или системного времени ГЛОНАСС для конкретного спутника). Широковещательные эфемеридные данные представляют собой набор подобранных коэффициентов многочлена второго порядка, используемых приемником для прогнозирования поведения часов приемника для приемника определения местоположения (например, опорного приемника 51). Каждый навигационный спутник передает эфемеридные данные своей собственной орбиты и показания спутниковых часов. Точность широковещательных эфемеридных часов обычно составляет, например, порядка 2-3 метров относительно времени GPS.
На этапе S403 в каждый интервал времени (например, эпоху) модуль 26 оценивания параметров или центральная электронная система 16 обработки данных оценивает вычисленные данные погрешности спутниковых часов для каждого спутника на основании одного или более из следующих собранных данных: измерений псевдодальностного кода сети 15 приемников для каждого спутника, измерений фазы несущей сети 15 приемников для каждого спутника, соответствующих известных местоположений стационарных опорных приемников 51 в сети 15 приемников и данных навигационного сообщения (например, эфемеридных данных и широковещательных данных погрешности спутниковых часов).
Этап S403 может осуществляться в соответствии с различными методами, которые можно применять попеременно или совокупно. В соответствии с первым методом в каждый интервал времени (например, эпоху) модуль 26 оценивания параметров или центральная электронная система 16 обработки данных оценивает данные погрешности спутниковых часов для каждого спутника, который активен или правильно функционирует в одной или более орбитальных группировках (например, GPS, ГЛОНАСС или обеих), на основании измерений псевдодальностного кода, измерений фазы несущей, соответствующих известных местоположений стационарных приемников и данных навигационного сообщения.
В соответствии со вторым методом, если спутник обеспечивает искаженные или ненадежные спутниковые сигналы или искаженные или ненадежные данные в течение определенного периода времени, модуль 26 оценивания параметров или центральная система 16 обработки данных может приостанавливать обработку данных погрешности спутниковых часов для дефектного или подозрительного спутника в течение периода времени, пока сигнал, принятый от спутника, не будет иметь достаточное качество сигнала или уровень надежности принятых данных.
В соответствии с третьим методом модуль 26 оценивания параметров или центральная электронная система 16 обработки данных использует одинарную разностную процедуру для определения вычисленных данных погрешности спутниковых часов для каждого соответствующего спутника в одной или более орбитальных группировках (например, орбитальных группировках GPS или ГЛОНАСС). Например, одинарная разностная процедура означает разность между измерениями фазы несущей от двух опорных приемников 51 (например, в известных фиксированных местоположениях или географических координатах), которые, по существу, одновременно принимают несущие сигналы от одних и тех же спутников для определения вычисленных данных погрешности спутниковых часов со сниженной погрешностью или отклонением часов. Вычисленные данные погрешности спутниковых часов можно выразить как дифференциальное время или смещение относительно системного времени GPS или системного времени ГЛОНАСС.
В соответствии с четвертым методом модуль 28 разности хода часов или центральная электронная система 16 обработки данных использует двойную разностную процедуру для определения вычисленных данных погрешности спутниковых часов. Например, двойная разностная процедура означает разность между измерениями фазы несущей от двух опорных приемников (например, в известных фиксированных местоположениях или географических координатах), которые, по существу, одновременно принимают несущие сигналы от одной и той же пары двух спутников для определения вычисленных данных погрешности спутниковых часов со сниженной погрешностью или смещением часов. На практике двойную разность можно определять взятием второй разности двух определений одинарной разности, где одинарная разность означает разность между измерениями фазы несущей от двух опорных приемников 51 (например, в известных фиксированных местоположениях или географических координатах), которые, по существу, одновременно принимают несущие сигналы от одних и тех же спутников для определения вычисленных данных погрешности спутниковых часов со сниженной погрешностью или отклонением часов. Вычисленные данные погрешности спутниковых часов можно выразить как дифференциальное время или смещение относительно системного времени GPS или системного времени ГЛОНАСС.
Другие этапы или процедуры, показанные на фиг. 5, включающие в себя этапы S406, S408, S410 и S412, идентичны или, по существу, аналогичны изложенным в способе, представленном на фиг. 4.
На Фиг. 6 показана блок-схема операций способа для определения оценки положения или оценки скорости на приемнике, который принимает коррекции погрешности часов. Способ, представленный на фиг. 6, начинается с этапа S600. Способ, представленный на фиг. 6, может использовать вариант осуществления приемника определения местоположения, представленный на фиг. 3, или другую конфигурацию приемника определения местоположения, который способен принимать и использовать коррекции погрешности часов для обеспечения более точных оценок положения, чем было бы возможно в другом случае.
На этапе S600 декодер 320 или электронная система 308 обработки данных приемника декодирует измерения псевдодальностного кода, принятые приемником 42 определения местоположения, на соответствующих несущих сигналах, передаваемых одним или более навигационным спутникам.
На этапе S602 устройство 304 измерения фазы или электронная система 308 обработки данных приемника определяет измерения фазы несущей для соответствующих несущих сигналов.
На этапе S604, декодер 320 или электронная система 308 обработки данных приемника принимает широковещательные погрешности спутниковых часов на несущих сигналах от одного или более навигационных спутников.
На этапе S606 устройство (41 или 141) передачи коррекции или порт 322 данных электронной системы 308 обработки данных приемника принимает коррекцию в отношении широковещательной погрешности часов каждого навигационного спутника, которая содержит функцию погрешности часов спутника эталонных часов, прибавленную к широковещательной погрешности часов для каждого навигационного спутника в одной или более орбитальных группировках, где значение коррекции для каждой эпохи ограничивается на основании предела параметра управления.
На этапе S608 система 308 обработки данных или модуль 318 оценивания положения определяет оценку положения приемника определения местоположения на основании декодированных измерений псевдодальностного кода, определенных измерений фазы несущей, принятых широковещательных погрешностей спутниковых часов и принятой коррекции. Например, система 308 обработки данных или модуль 318 оценивания положения может разрешать фазовые неопределенности или целочисленные фазовые неопределенности, чтобы определенные измерения фазы несущей оказывались в оцененном местоположении, согласованном с принятой коррекцией широковещательной погрешности часов.
Этап S608 может осуществляться в соответствии с различными методами, которые можно применять по отдельности или совокупно.
Согласно первому методу, система 308 обработки данных или модуль 318 оценивания положения может определять оценку положения и оценку скорости приемника определения местоположения на основании декодированных измерений псевдодальностного кода, определенных измерений фазы несущей, принятых широковещательных погрешностей спутниковых часов и принятых коррекций погрешности часов (например, на поэпоховой основе).
Согласно второму методу, предел параметра управления пропорционален погрешности часов спутника эталонных часов. Согласно третьему методу, предел параметра управления меньше или приблизительно равен погрешности часов спутника эталонных часов. Согласно четвертому методу, изменение в коррекции или коррекция часов для каждой эпохи или другого интервала времени (например, множественных соседних эпох) ограничивается согласно следующему уравнению:
 ,
,
где dX - обновление состояния до оценки коррекции часов; H - матрица плана с коэффициентами чувствительности; P - дисперсионно-ковариационная матрица; R - дисперсия применяемых данных коррекции; dClk - погрешность часов спутника эталонных часов и Threshold - максимальное изменение коррекции, допустимое для каждой эпохи, как это раскрыто в формуле изобретения.
Согласно пятому методу, если вычисленная дисперсия R применяемых данных коррекции больше нижеприведенного значения TR, вычисленная дисперсия R используется для обновления состояния коррекции.
 .
.
Согласно шестому методу, если вычисленная дисперсия R меньше, чем значение TR, TR используется вместо R для обновления состояния коррекции в соответствии с уравнениями, обеспеченными согласно четвертому и пятому методам.
Из описанного предпочтительного варианта осуществления следует, что можно предложить различные модификации, не выходя за рамки объема изобретения, заданного в нижеследующей формуле изобретения.
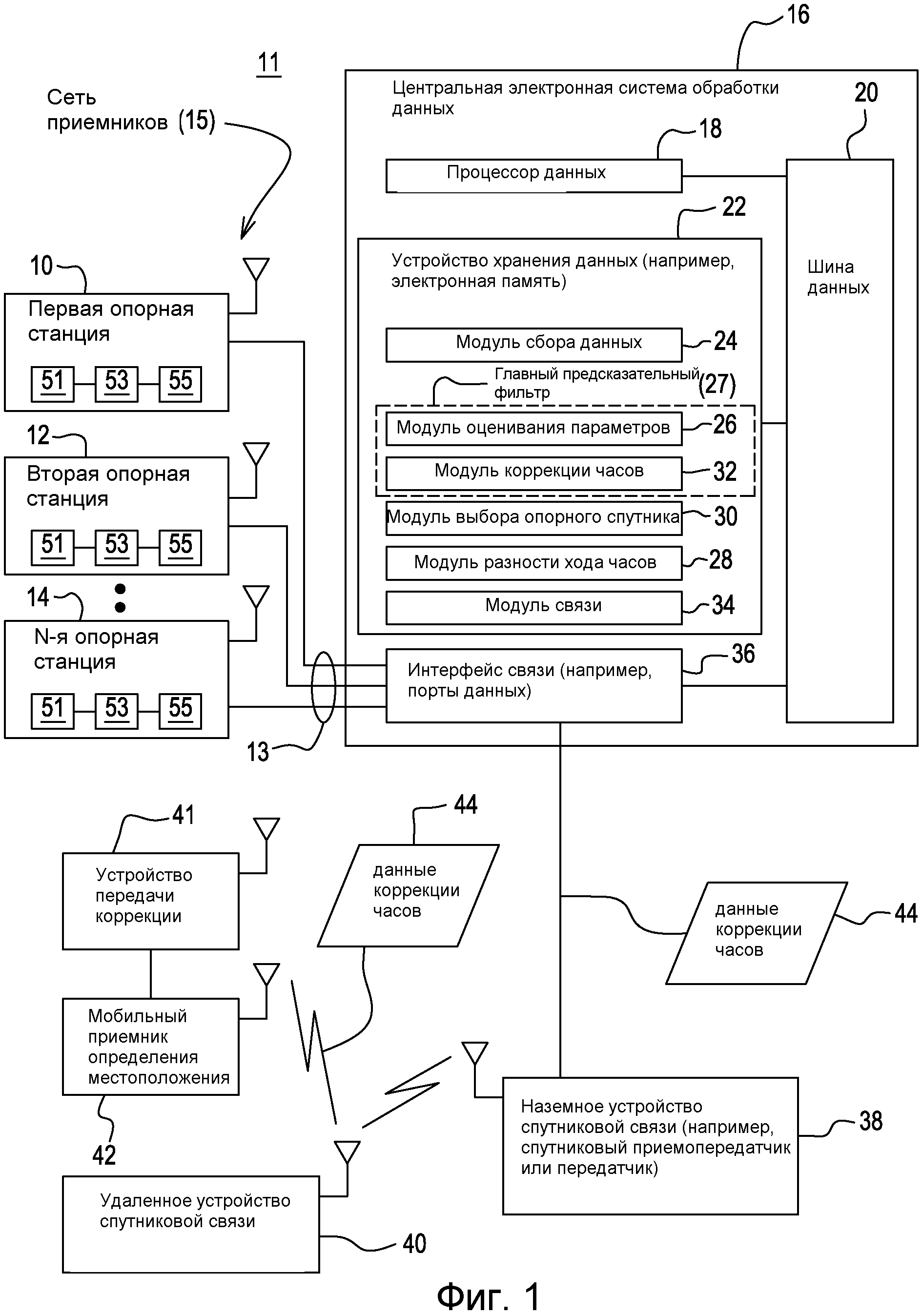
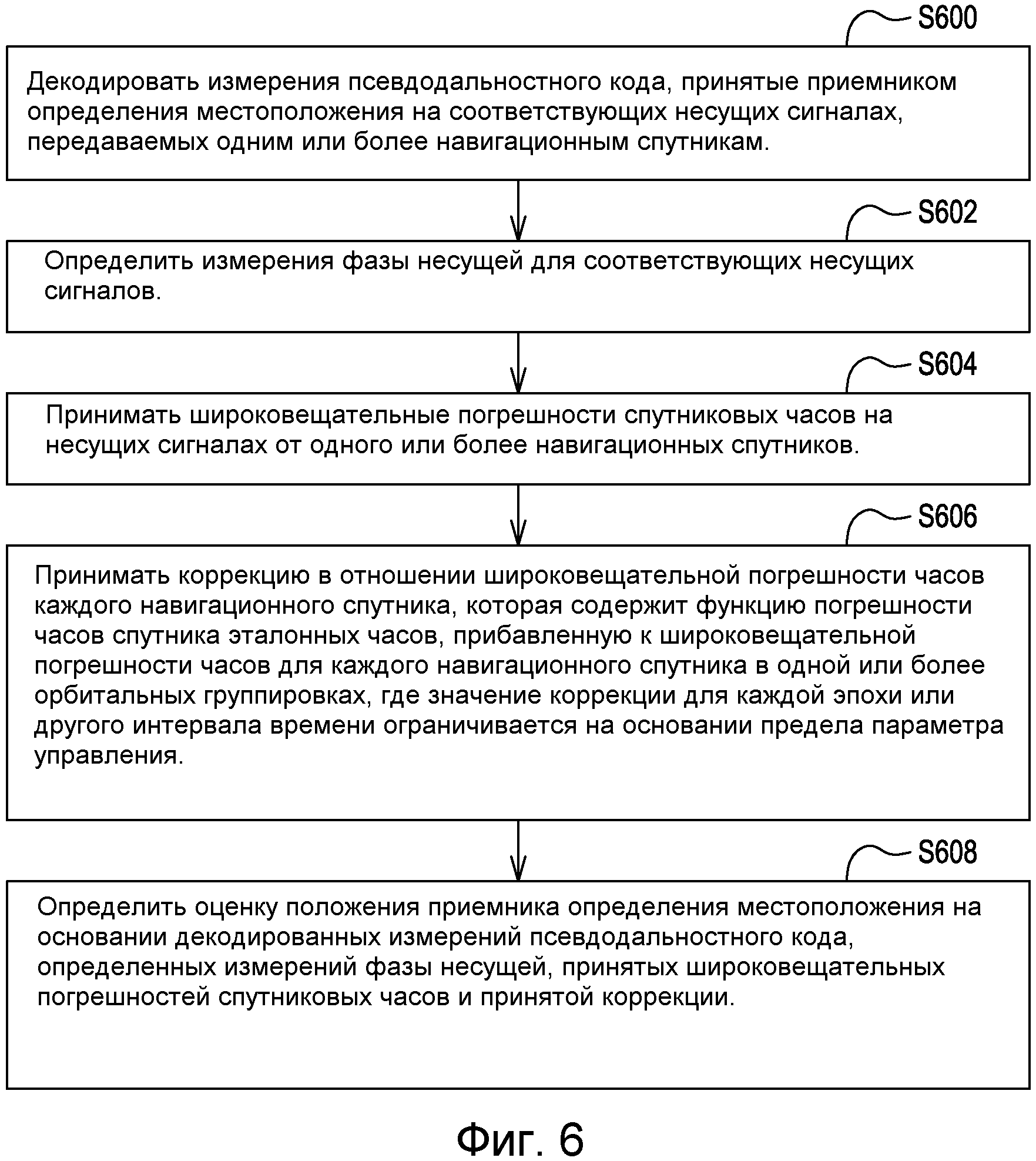

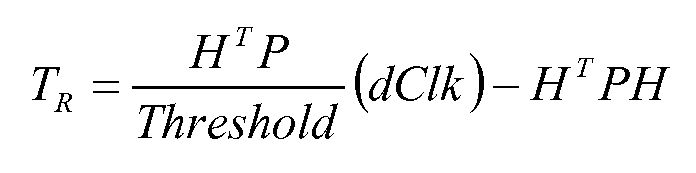
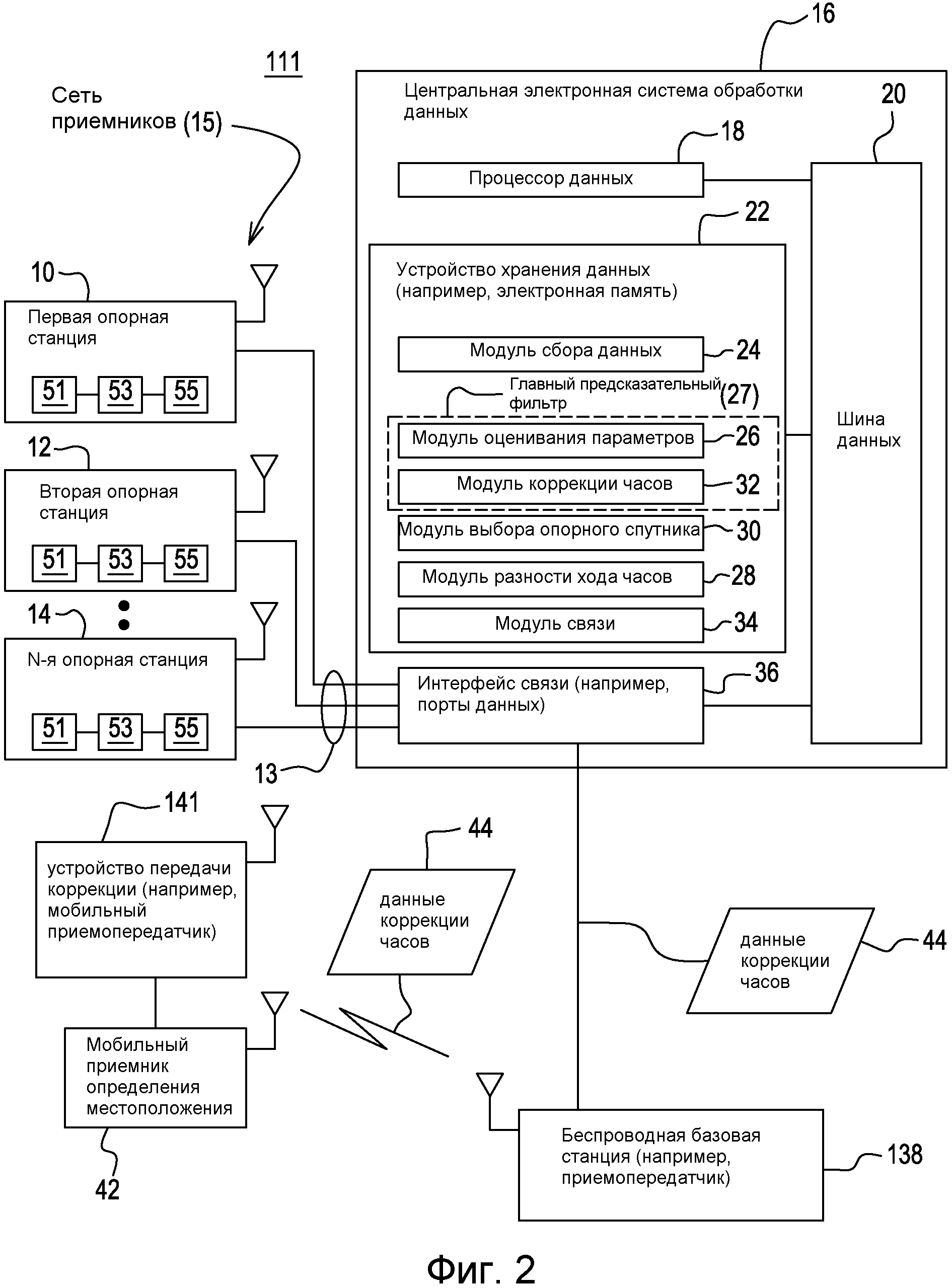
Режущая система с возвратно-поступательными ножами
Самоочищающееся рядное устройство
Втулка привода высеивающего диска
Распределительный кривошип и цилиндрический конвейер для сельскохозяйственной уборочной машины
Рабочая машина с бесступенчатой коробкой передач, мощность которой автоматически регулируется в зависимости от нагрузки двигателя
Разрешение целочисленной неоднозначности фазы несущей методом частичного поиска
Зависящее от расстояния уменьшение ошибки при определении местоположения в режиме кинематики реального времени
Сельскохозяйственный виндроуэр (варианты) и жатка для уборки зерновых
Дифференциальная трансмиссия с функцией очистки
Сельскохозяйственная посевная система
Режущая система с возвратно-поступательными ножами
Самоочищающееся рядное устройство
Втулка привода высеивающего диска
Распределительный кривошип и цилиндрический конвейер для сельскохозяйственной уборочной машины
Рабочая машина с бесступенчатой коробкой передач, мощность которой автоматически регулируется в зависимости от нагрузки двигателя
Рабочая машина с управлением ограничением крутящего момента для бесступенчатой трансмиссии
Разрешение целочисленной неоднозначности фазы несущей методом частичного поиска
Отражатель недомолоченных колосков устройства повторного обмолота
Сельскохозяйственный виндроуэр (варианты) и жатка для уборки зерновых
Дифференциальная трансмиссия с функцией очистки

