Результат интеллектуальной деятельности: Способ бесконтактного измерения смещения токоведущего проводника от геометрического центра кабельной жилы
Вид РИД
Изобретение
Данный способ может быть использован при повышении качества и эффективности построения измерительных систем в области кабельного производства и в иных отраслях промышленности.
Известен способ определения положение токоведущего проводника, (расположен по адресу: https://pandia.ru/text/80/288/76409.php , дата публикации 03.10.2016 года подтверждена веб – архивом), измерение происходит в стационарных системах координат, использующих зависимость напряжения от положения объекта. При таком способе определения положения проводника в пространстве налагаются очень жесткие требования к стабильности поддержания тока в проводнике и его регулированию в широких пределах в зависимости от постоянно меняющегося сопротивления проводника и сложной цепи обратной связи.
Технический результат изобретения заключается в способе, позволяющем с высокой точностью измерять координаты электромагнитной системы, для определения степени смещения токоведущего проводника от геометрического центра кабельной жилы.
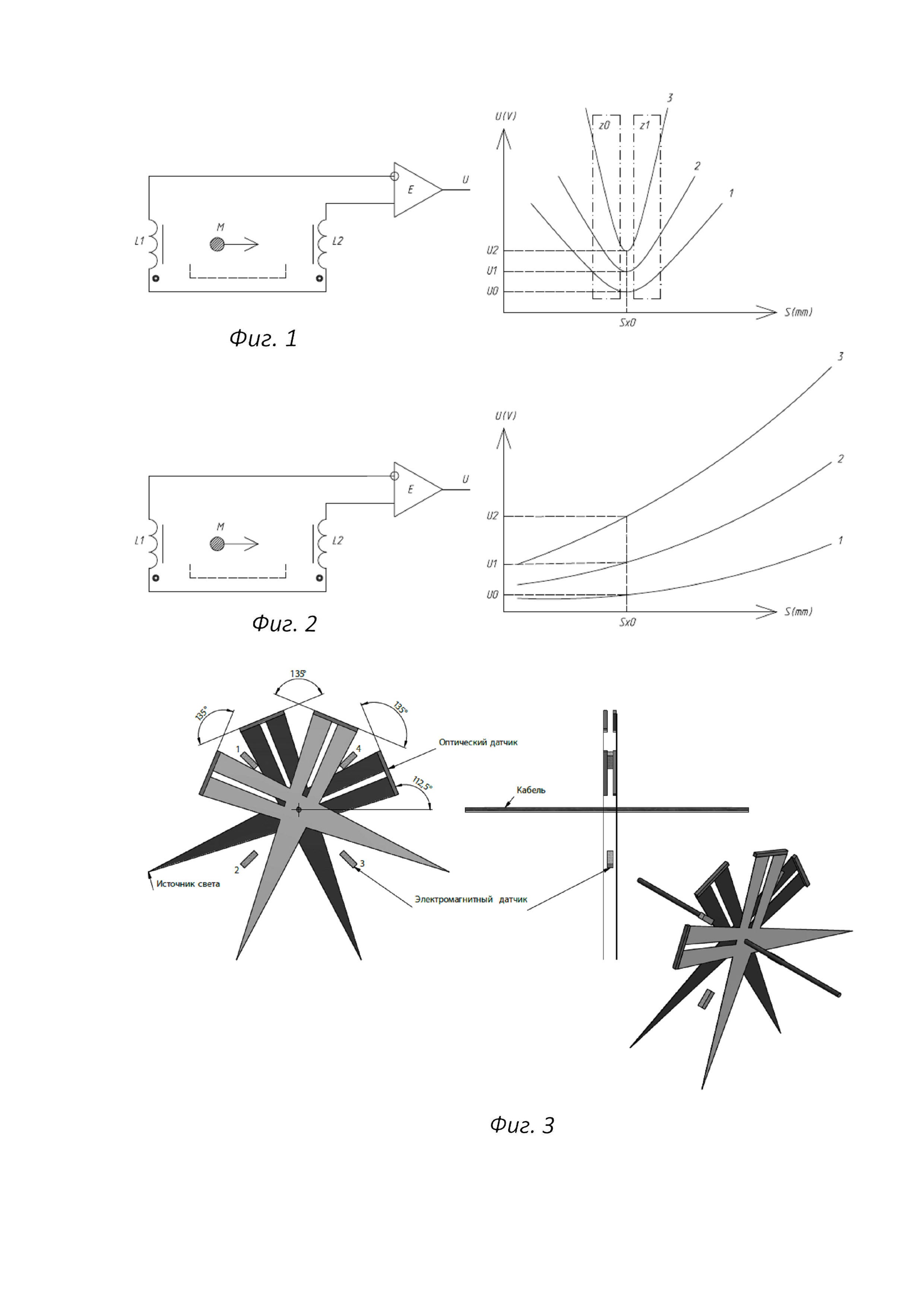
Сущность заявленного способа заключается в том, что для определения координат объекта измерения, например, кабеля с медной жилой используется устройство, имеющее подвижную систему координат, которая вне зависимости от состояния измеряемого объекта всегда позволяет перейти к решениям, как показано на фиг.1.
Определение эксцентриситета токопроводящей жилы
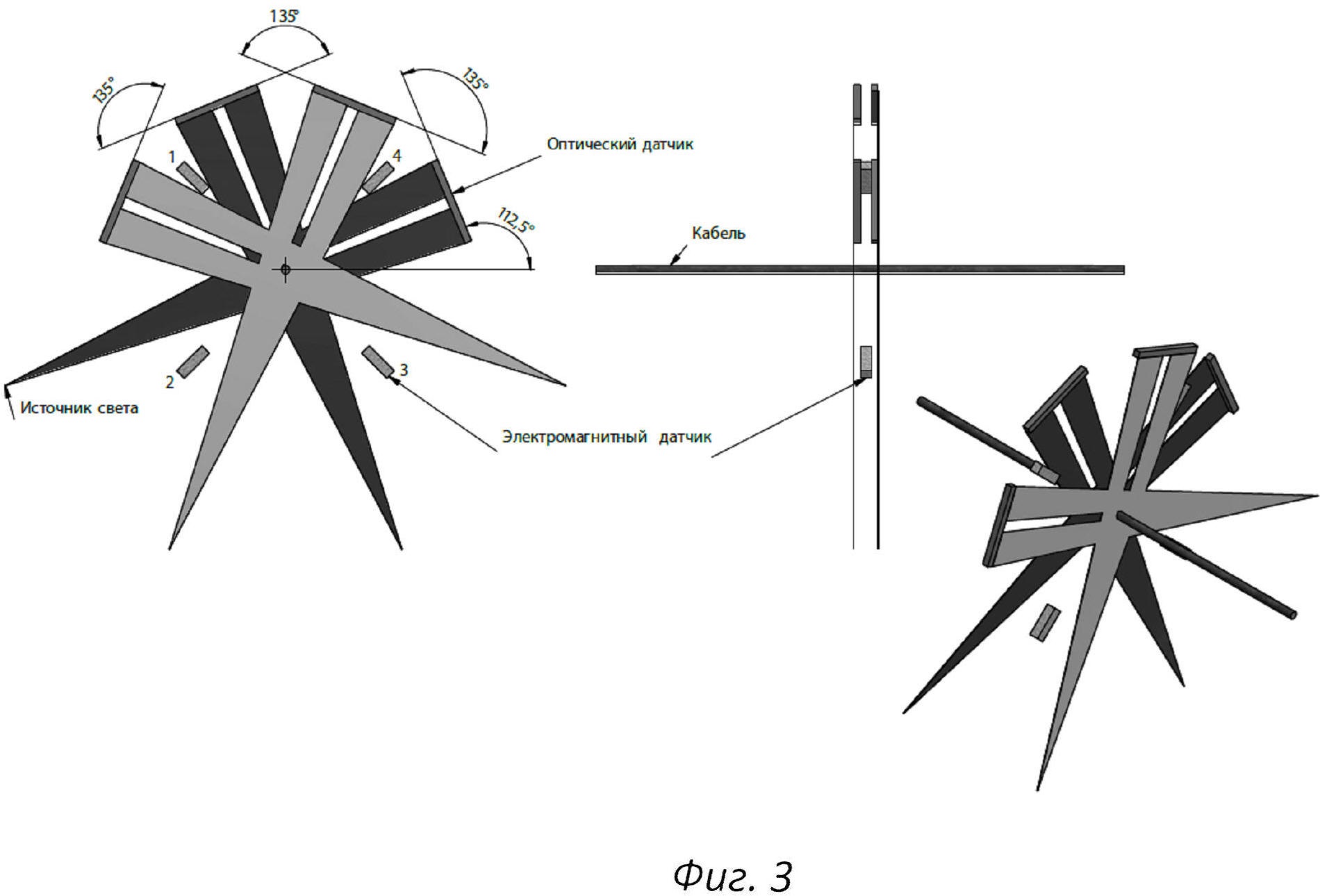
Для осуществления предложенного нами способа используется устройство, содержащее индуктор для наведения тока необходимой формы и частоты на измеряемый токоведущий проводник, данный элемент устройства располагается по ходу движения токоведущего проводника. Кроме этого устройство содержит несколько пар оптических датчиков для отслеживания положения кабеля расположенных по контору на вершине устройства в горизонтальной проекции, под углом 45° относительно друг друга.
Также устройство имеет четыре электромагнитных датчика в вертикальной проекции расположенных под углом 45° по отношению к горизонтальной плоскости.
При этом первая пара оптических датчиков, (жёлтый поток световых лучей) образует первую оптическую плоскость координат, а вторая пара оптических датчиков (красный поток световых лучей) расположена за первой парой на некотором расстоянии и повернута относительно неё на угол 45°, образует вторую оптическую плоскость координат. Меду первой и второй оптическими плоскостями по центру расположены четыре электромагнитных датчика, при этом датчики соединены встречно и образуют одно направление отсчёта на координатной плоскости. Таким образом, создаётся система электромагнитных координат, образующая декартовую систему координат на плоскости, расположенную под углом 45° к горизонту по отношению к осям устройства, на которых зафиксированы датчики. При этом измерение осуществляется вне зависимости от того будет ли система координат подвижна относительно неподвижного кабеля, или же наоборот кабель будет подвижен относительно неподвижной системы координат, или оба варианта в любом сочетании.
Оси с расположенными на них датчиками жёстко зафиксированы относительно друг друга на подвижном каркасе устройства (см. фиг.3). Подвижный каркас имеет одну степень свободы и в рабочем состоянии производит колебательные или возвратно-поступательные движения с определенным периодом ортогонально положению проходящей жилы (кабеля), пересекающей две оптические плоскости координат и таким же образом пересекающей оси устройства под углом 45°. Две оптические плоскости разнесены друг от друга на определенное расстояние и развёрнуты на угол 45° относительно друг друга. Такое положение плоскостей обеспечивает корректировку угла вхождения жилы в рабочую зону таким образом, что расчетный диаметр жилы не зависит от угла вхождения жилы, при этом в независимости положения жилы в рабочей зоне устройства, всегда точно определяется овальность жилы.
За одно поступательное перемещение системы координат осуществляется пересечение обеих электромагнитных осей.
Определение эксцентриситета жилы происходит в следующем порядке:
1. Определяются электромагнитные координаты минимума проходящей изолированной жилы. При этом используются данные оптической измерительной системы.
2. Из определенных электромагнитных координат минимума неизолированной жилы, хранящихся в памяти устройства, и вычисленных на этапе калибровки устройства, вычитаются текущие электромагнитные координаты минимума рабочей изолированной жилы.
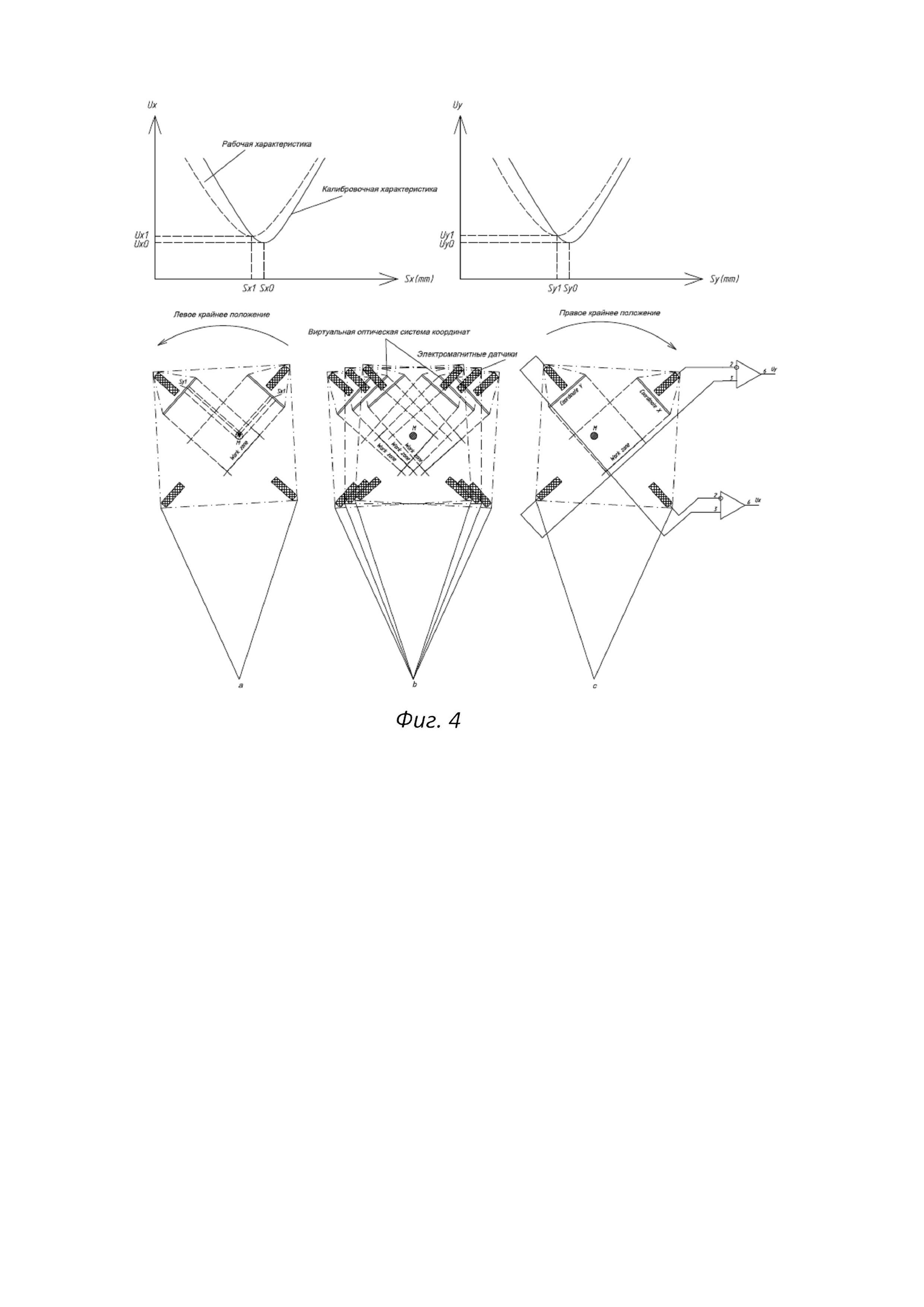
При движении системы координат в направлении слева – направо на выходе схемы измерения по каждой из координат Х и У формируются графики рабочих характеристик, как показано на фиг.2, где S – положение объекта измерения, а U – напряжение на выходах схем измерения. В этом случае координаты минимумов парабол калибровочной характеристики Sx1 и Sy1 будут отличаться от координат минимумов парабол калибровочной характеристики Sx0 и Sy0 на величину смещения токоведущего проводника. Это смещение наблюдается по соответствующим координатам. В случае отсутствия смещения токоведущего проводника от геометрического центра жилы, координата минимума рабочей характеристики по оси Sх будет полностью совпадать с координатой минимума калибровочной характеристики, при этом сама форма параболической зависимости рабочей характеристики (крутизна) может существенно отличаться от формы калибровочной характеристики.
Электромагнитные координаты рассчитываются при помощи двух оптических плоскостей. Поскольку направление электромагнитных координат не совпадает с направлением оптических координат и составляет угол +22,52° и -22,5° для каждой из оптической координатной плоскости, то при расчётах используется виртуальная система координат, получаемая простым поворотом каждой из оптических координатных плоскостей на соответствующий угол. Виртуальная система координат полностью совпадает с электромагнитной системой координат, совмещена с ней и является основой для точного определения положения графиков вдоль оси S как показано на фиг.1.
Осуществление предложенного нами способа:
Через отверстие, выполненное по центру в корпусе устройства для бесконтактного измерения смещения токоведущего проводника, протягивается кабель, содержащий токоведущий проводник (жилу). При этом в памяти устройства после проведения калибровки хранятся электромагнитные координаты минимума неизолированной жилы. При помощи индуктора на токоведущий проводник наводится ток заданной частоты и формы. Осуществляя циклическое колебательное движение измерительной системы, относительно проходящего в измеряемой зоне кабеля происходит синхронное снятие показаний уровня напряжения с электромагнитных датчиков и соответствующих этим показаниям координат положения кабеля в измеряемой зоне. Из определенных электромагнитных координат минимума неизолированной жилы, хранящихся в памяти устройства, и вычисленных на этапе калибровки устройства, вычитаются текущие электромагнитные координаты минимума рабочей изолированной жилы. После обработки результатов измерений определяется смещение токоведущего проводника относительно геометрического центра измеряемого кабеля. Результаты измерений в графическом виде отображаются на экране ЭВМ или любого портативного устройства для вычислений и обработки данных.
Летательный аппарат
Летательный аппарат
Летательный аппарат
Сверхзвуковой самолет
Летательный аппарат
Летательный аппарат
Летательный аппарат
Сверхзвуковой самолет
Дверь-трап летательного аппарата
Убирающееся шасси летательного аппарата

