Результат интеллектуальной деятельности: Посадочный радиолокатор
Вид РИД
Изобретение
Посадочный радиолокатор относится к радиолокационным средствам автоматизированных систем управления полетами и посадкой воздушных судов (ВС) в аэродромной зоне, использующим первичные средства радиолокации с формированием и излучением высокочастотных зондирующих импульсов, последующим приемом и обработкой радиолокационных сигналов, отраженных от ВС и других воздушных объектов.
Известны посадочные радиолокаторы (ПРЛ) для управления полетами и посадкой ВС в аэродромной зоне: ПРЛ-4 [1], РП-3Г [2], ПРЛ радиолокационных систем посадки (РСП) РСП-6М2 [3], РСП-7 [4] и РСП-27С [5], посадочный канал радиолокационного комплекса AN/TPN-31 [6], ПРЛ PAR 2090С [7] и посадочный радиолокатор RP-5M [8].
Посадочные радиолокаторы ПРЛ-4 [1] и РП-3Г [2], а также ПРЛ радиолокационных систем посадки РСП-6М2 [3] и РСП-7 [4] разработаны с использованием зеркальных антенн с механическим сканированием (обзором), позволяют осуществлять равномерный последовательный обзор воздушного пространства и наблюдение ВС в контролируемой воздушной зоне, а также совместно с другими радиотехническими средствами участвуют в обеспечении посадки ВС на взлетно-посадочную полосу (ВПП) аэродрома.
Недостатком данных ПРЛ является громоздкость конструкции, низкая эксплуатационная технологичность, практическая невозможность их серийного изготовления (ввиду морального устаревания элементной базы и материалов), низкая надежность, а также несоответствие точности измерения основных параметров положения (координат) и движения ВС требованиям современных нормативных документов РФ [9] и мировых стандартов.
Другим недостатком данных ПРЛ является отсутствие возможности организации квазислучайного обзора пространства (неравномерного в плоскости сканирования) с реализацией режима обнаружения и сопровождения ВС с укороченным (по сравнению с периодом обзора) интервалом обновления информации, позволяющим улучшить его энергетические и точностные характеристики.
Посадочный канал радиолокационного комплекса AN/TPN-31 [6] разработан с использованием неподвижных курсовой и глиссадной активных антенных решеток (АР) на базе активных приемо-передающих модулей и позволяет наряду с последовательным обзором осуществлять квазислучайный обзор воздушного пространства, предоставляющий возможность организации режима обнаружения и сопровождения ВС в любом произвольном направлении с меняющимся и укороченным периодом обновления информации.
Недостатком данного посадочного канала является его высокая стоимость, обусловленная использованием в АР дорогих активных приемопередающих модулей, и отсутствие возможности оперативной смены направления посадки вследствие наличия одной неподвижной комбинированной глиссадно-курсовой антенны, ориентированной вдоль только одного из двух возможных противоположных направлений посадки ВС на ВПП.
Посадочный радиолокатор PAR 2090С [7] разработан с применением независимых курсовой и глиссадной пассивных антенных решеток, устанавливаемых в заданном направлении путем разворота с использованием соответствующих опорно-поворотных устройств и выполняющих механическое сканирование зоны обзора.
Недостатком ПРЛ PAR 2090С является механическое движение антенн при сканировании, что снижает надежность ПРЛ и не позволяет организовать квазислучайный обзор пространства для реализации режима обнаружения и сопровождения ВС с укороченным периодом обновления информации.
Другим недостатком ПРЛ PAR 2090С является сложность конструктивного исполнения, предполагающего размещение аппаратуры ПРЛ в двух контейнерах.
ПРЛ RP-5M [8] разработан с использованием двух идентичных приемо-передающих каналов, каждый из которых состоит из передатчика, циркулятора, приемника и сигнального процессора, а также зеркальных антенн курса и глиссады, перемещаемых в заданном секторе пространства с помощью опорно-поворотных устройств.
Недостатком ПРЛ RP-5M является использование зеркальных антенн с механическим равномерным сканированием зоны обзора и поворотом антенн на заданное направление посадки, что снижает показатели надежности ПРЛ и не позволяет организовать квазислучайный обзор контролируемого воздушного пространства, обеспечивающий режим сопровождения ВС с укороченным периодом обновления информации. Кроме того, в ПРЛ используется традиционный метод обнаружения и измерения координат ВС по огибающей пакета эхо-сигналов, последовательно принимаемых от ВС в пределах монотонно сканирующей ДН антенны, что приводит к возникновению ошибок измерения координат при флюктуациях или пропадании отдельных импульсов пакета и не позволяет сократить время, необходимое для обнаружения и измерения параметров положения и движения ВС.
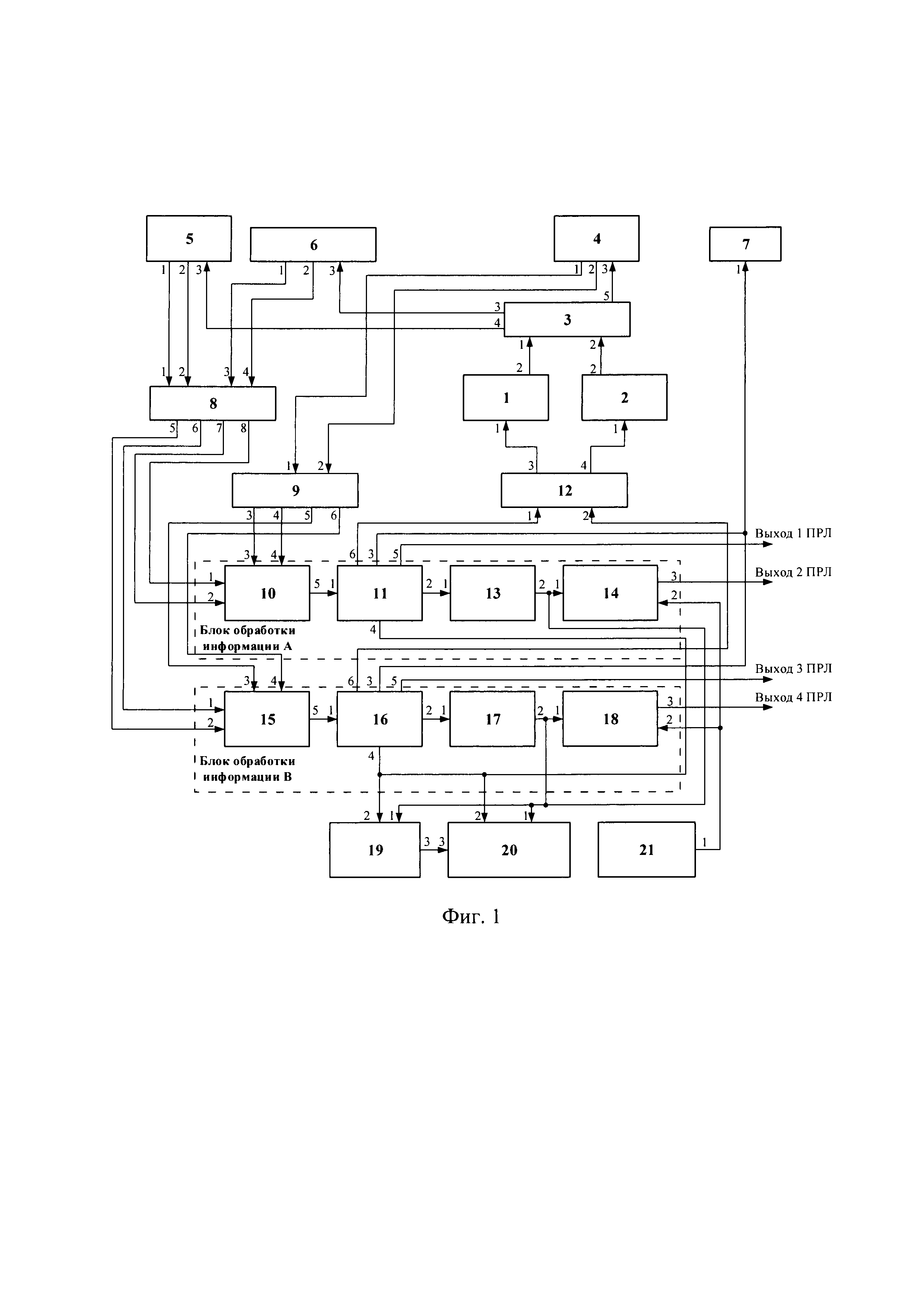
Наиболее близким по технической сущности к предлагаемому ПРЛ является ПРЛ из состава радиолокационной системы посадки РСП-27С (прототип) (фиг. 1) [5], используемый в современных отечественных системах управления воздушным движением для обнаружения и контроля за полетом ВС на траектории захода на посадку.
ПРЛ из состава радиолокационной системы посадки РСП-27С разработан с применением двух неподвижных пассивных моноимпульсных курсовых АР, ориентированных на противоположные направления посадки, одной пассивной моноимпульсной глиссадной АР, устанавливаемой на заданное направление посадки путем соответствующего поворота в горизонтальной плоскости, и с использованием режима оперативного квазислучайного обзора воздушного пространства при частотном сканировании и моноимпульсной обработке отраженных радиолокационных эхо-сигналов.
Недостатком данного посадочного радиолокатора является повышенная погрешность измерения угла места (в вертикальной плоскости) ввиду возникновения неоднозначности измерения угломестных координат для низколетящих ВС вследствие повышенного влияния переотражений эхо-сигналов от земной поверхности, что является недопустимым на заключительном этапе захода ВС на посадку.
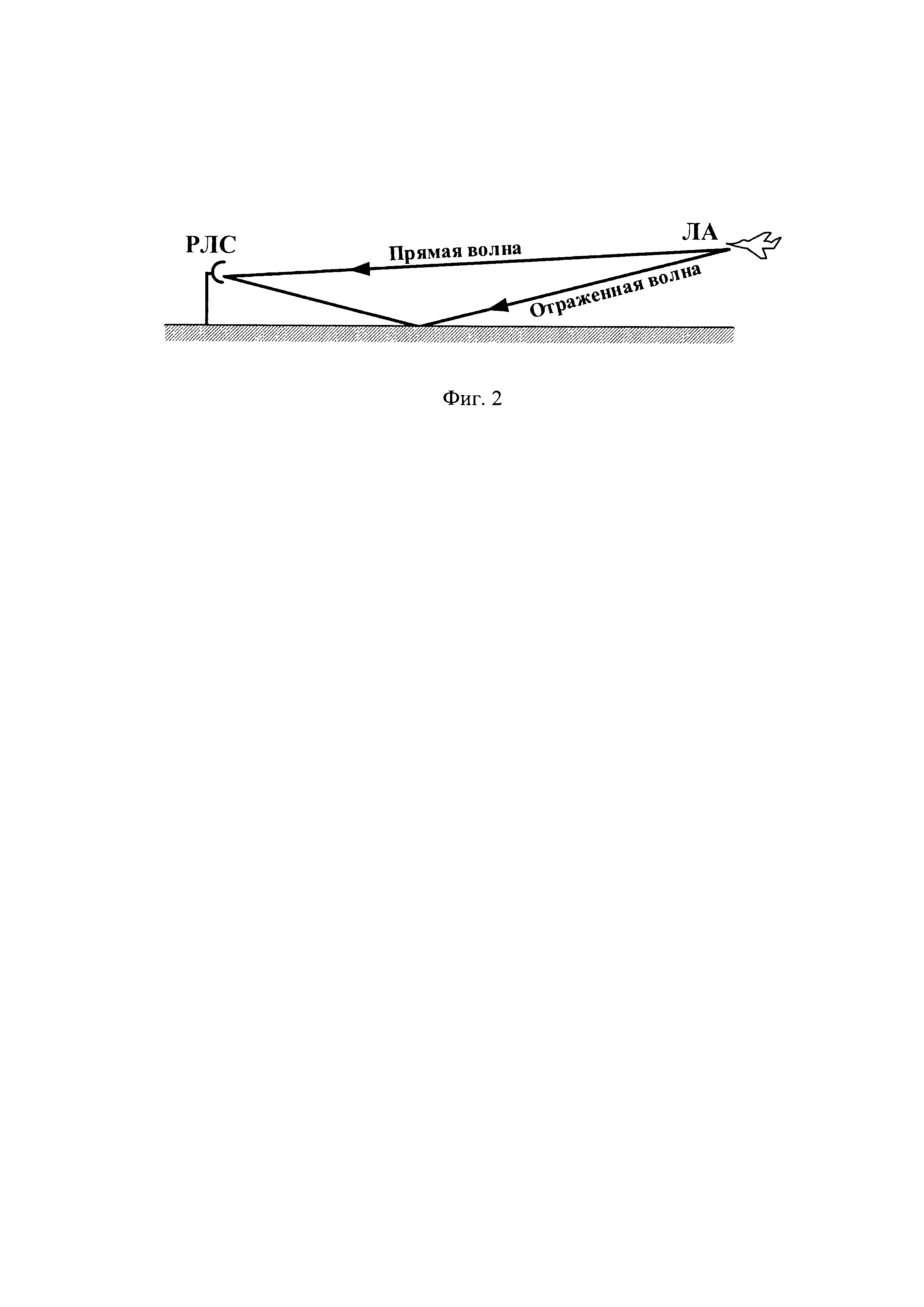
В режиме обнаружения ВС на малых углах места наряду с сигналом реальной цели наблюдается ее зеркальное отражение от земной поверхности. Отраженный от цели сигнал приходит к антенне ПРЛ по двум путям, во-первых, непосредственно по прямому направлению, и, во-вторых, после отражения от поверхности земли. Сигнал, отраженный от поверхности, эквивалентен по своим характеристикам излучению некоторого «зеркального» источника, расположенного ниже уровня поверхности.
Поле в точке приема ПРЛ представляется как результат интерференции двух волн, следующих вдоль прямого и отраженного от земной поверхности лучей (фиг. 2).
Величина ошибки определения угла места ВС вследствие влияния земной поверхности определяется выражением [10]
где μ=F'(θ0)/F(θ0) - пеленгационная чувствительность, θ0 - положение максимума диаграммы направленности относительно равносигнального направления; θрсн - угол равносигнального направления относительно горизонта; F(θ0-2θрсн) и F(θ0-2θрсн) - диаграммы направленности антенн соответствующих приемных каналов; Δϕ - разность фаз между прямой и отраженной волнами, ρ - коэффициент отражения земной поверхности.
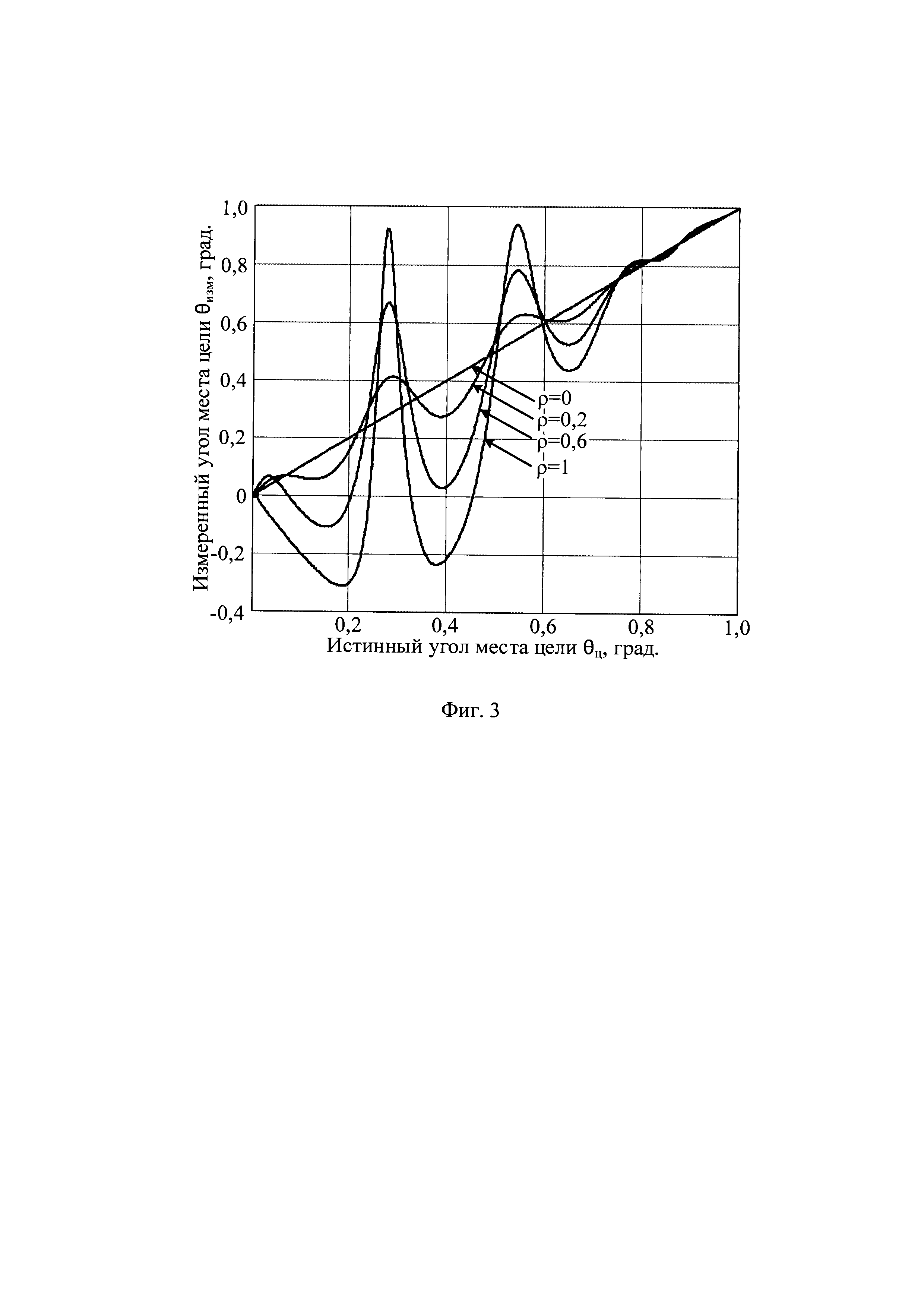
На фиг. 3 представлена зависимость ошибки определения угла места низколетящих ВС от их истинного угла места. Как следует из приведенной зависимости, величина ошибки определения угла места цели в условиях переотражений от земной поверхности тем больше, чем ближе к поверхности земли находится цель и зависит от величины коэффициента отражения земной поверхности. Например, при измеренном угле места ВС 0,7 град. при коэффициенте отражения 0,6 возникает неоднозначность измерения, дающая 5 возможных значений угла места ВС, что значительно увеличивает ошибку измерения угла места и что недопустимо с точки зрения обеспечения безопасности полетов ВС.
Цель изобретения - повышение точности определения угломестных координат низколетящих ВС в ПРЛ.
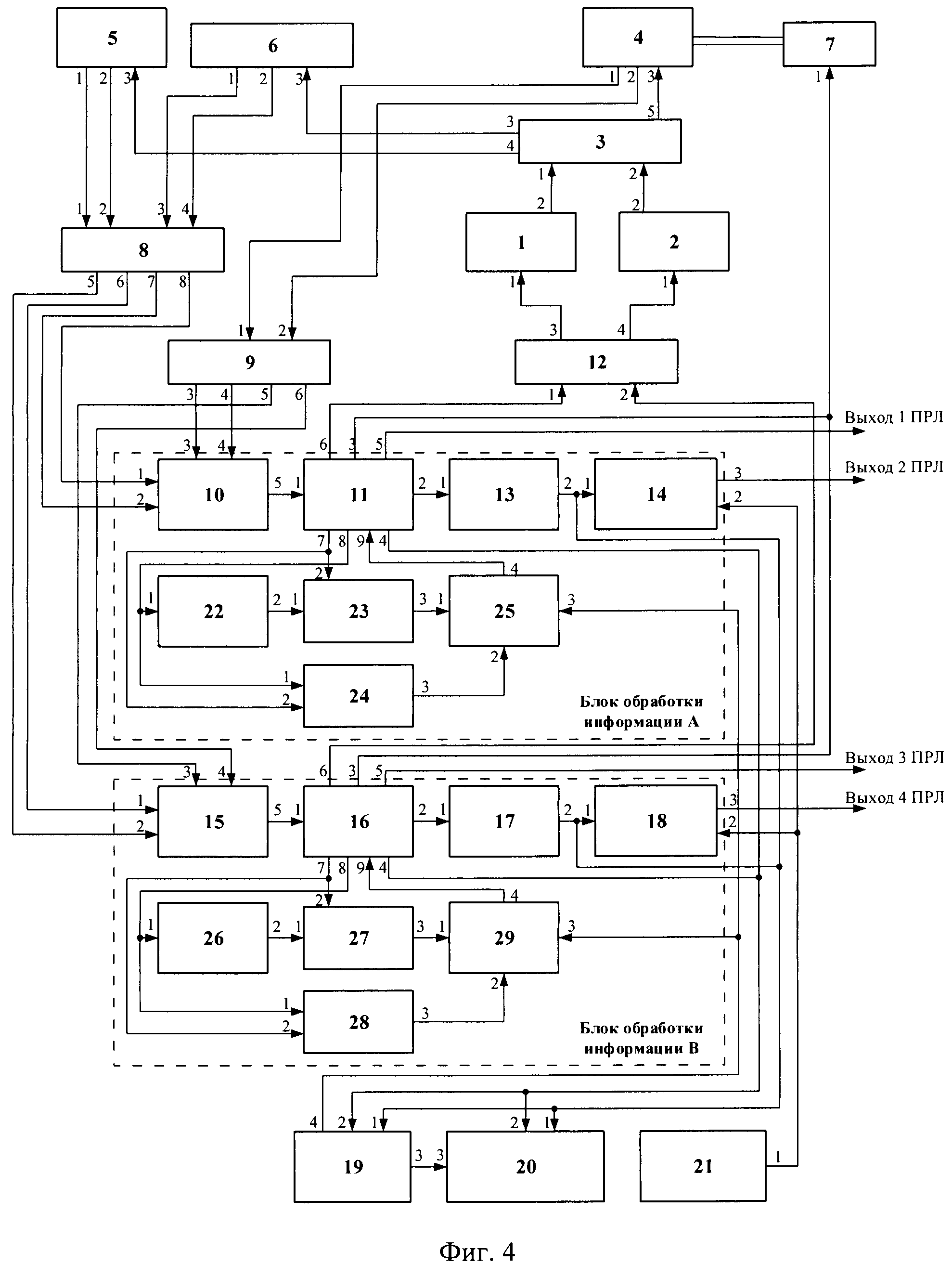
Поставленная цель достигается благодаря введению в блоки обработки информации А и В (фиг. 4) блоков фазовращателей (22) и (26), блоков цифровых фазовых детекторов (23), (24), (27) и (28) и модулей измерения координат (25) и (29), а также применению моноимпульсной обработки сигналов с использованием квадратурных составляющих нормированного разностного сигнала по отношению к суммарному на комплексной плоскости.
На фиг. 4 представлена функциональная схема предлагаемого ПРЛ. ПРЛ содержит два идентичных приемо-передающих канала, которые состоят из передатчиков (1) и (2), приемников (10) и (15), сигнальных процессоров (11) и (16), причем, выходы 5 приемников (10) и (15) подключены соответственно к входам 1 сигнальных процессоров (11) и (16), при этом выходы 7 сигнальных процессоров (11) и (16) подключены соответственно к входам 2 цифровых фазовых детекторов (23) и (24), (27) и (28), выходы 8 сигнальных процессоров (11) и (16) подключены соответственно к входам 1 фазовращателей (22) и (26), а также соответственно к входам 1 цифровых фазовых детекторов (24) и (28), выходы 2 фазовращателей (22) и (26) подключены соответственно к входам 1 цифровых фазовых детекторов (23) и (27), выходы 3 цифровых фазовых детекторов (23) и (27) подключены соответственно к входам 1 модулей измерения координат (25) и (29), выходы 3 цифровых фазовых детекторов (24) и (28) подключены соответственно к входам 2 модулей измерения координат (25) и (29), ПРЛ содержит антенну курса (5), антенну глиссады (4), опорно-поворотное устройство глиссады (7), на котором устанавливается антенна глиссады и управляющий вход (1) которого подключается к соединенным вместе выходам 3 сигнальных процессоров (11) и (16), экстрактор (13), вход 1 которого подключен к выходу 2 сигнального процессора (11) канала А, технологический дисплей (20) и устройство регистрации (19), входы 1 которых соединены и подключены к выходу 2 экстрактора (13), а входы 2 соединены и подключены к соединенным вместе выходам 4 сигнальных процессоров (11) и (16), выход 5 сигнального процессора (11) является выходом 1 ПРЛ, ПРЛ содержит дополнительную антенну курса (6), дополнительный экстрактор (17), вход 1 которого подключен к выходу 2 сигнального процессора (16), переключатели (3), (8), (9) и (12), устройства управления и сопряжения каналов (14) и (18), а также технологический пульт управления (21), причем, входы 3 антенны курса (5), дополнительной антенны курса (6) и антенны глиссады (4) подключены соответственно к выходам 3, 4 и 5 переключателя (3), входы 1 и 2 которого подключены соответственно к выходам 2 передатчиков (1) и (2), входы 1 которых подключены соответственно к выходам 3 и 4 переключателя (12), входы 1 и 2 которого подключены соответственно к выходам 6 сигнальных процессоров (11) и (16), выходы 1 и 2 антенны курса (5) подключены соответственно к входам 1 и 2 переключателя (8), входы 3 и 4 которого подключены к выходам 1 и 2 дополнительной антенны курса (6), а выходы 5, 6, 7 и 8 подключены соответственно к входам 1 и 2 приемника (10) и входам 1 и 2 приемника (15), выходы 1 и 2 антенны глиссады (4) подключены соответственно к входам 1 и 2 переключателя (9), выходы 3, 4, 5 и 6 которого подключены соответственно к входам 3 и 4 приемника (10) и входам 3 и 4 приемника (15), выходы 2 экстрактора (13) и дополнительного экстрактора (17) соединены вместе и подключены к соединенным вместе входам 1 устройств управления и сопряжения (14) и (18), а также к входам 1 устройства регистрации (19) и технологического дисплея (20), выход 4 устройства регистрации (19) подключен к входам 3 модулей измерения координат (25) и (29), выходы 4 которых подключены соответственно к входам 9 сигнальных процессоров (11) и (16), входы 2 устройств управления и сопряжения (14) и (18) соединены вместе и подключены к выходу 1 технологического пульта управления (21), выход 5 сигнального процессора (16) является выходом 3 ПРЛ, а выходы устройств управления и сопряжения (14) и (18) являются соответственно выходами 2 и 4 ПРЛ.
Антенна курса, дополнительная антенна курса и антенна глиссады содержат по одной передающей антенне и по две идентичные приемные антенны, обеспечивающие реализацию амплитудного моноимпульсного метода обнаружения и оценки координат ВС.
Антенны курса и глиссады, ориентированные на противоположные направления посадки, неподвижны при обзоре, причем каждая из приемных и передающих антенн, входящих в состав антенн курса и глиссады, выполнена в виде антенной решетки, вибраторы которой подключены к замедляющей волноводной линии, имеющей один запитывающий конец и реализующей равномерное периодическое или квазислучайное сканирование антенного луча в пределах зоны обзора путем соответствующего изменения несущей частоты сигналов.
Аппаратура приема и обработки сигналов каналов А и В, включающая приемник, сигнальный процессор, фазовращатель, два цифровых фазовых детектора, модуль измерения координат, экстрактор и устройство управления и сопряжения, выполнена в виде двух автономных блоков обработки информации А и В.
ПРЛ содержит дублированные каналы передачи данных на выносной диспетчерский пункт управления воздушным движением в виде широкополосной линии передачи информации и узкополосной линии передачи данных.
Введение блоков фазовращателей, блоков цифровых фазовых детекторов и модулей измерения координат позволит повысить точность определения угломестных координат низколетящих ВС ПРЛ, заходящих на посадку.
Работа предлагаемого посадочного радиолокатора состоит в следующем. В основу работы ПРЛ положено использование двух независимых идентичных приемо-передающих каналов А и В, каждый из которых обеспечивает реализацию алгоритма амплитудного моноимпульсного измерения координат ВС. В ходе штатной работы с целью достижения максимального энергетического потенциала в ПРЛ используются одновременно оба передатчика (1) и (2), а также приемник, сигнальный процессор и экстрактор одного из приемных каналов А или В, причем, каждый из приемных каналов является четырехканальным и выполняет одновременную обработку радиолокационных сигналов, поступающих с выходов 1 и 2 антенны курса (5) или дополнительной антенны курса (6) и с выходов 1 и 2 антенны глиссады (4). Каждая из антенн курса и глиссады состоит из одной передающей антенны и двух приемных антенн. Вход передающей антенны является входом 3 антенн курса и глиссады, а выходы приемных антенн являются соответственно выходами 1 и 2 антенн курса и глиссады.
При помощи переключателя (3) передатчик (1) подсоединяется к входу одной из антенн курса, ориентированной на выбранное направление посадки, а передатчик (2) - к антенне глиссады или наоборот. В случае выхода одного из передатчиков из строя данный передатчик отключается, и ПРЛ на время ремонта неисправного передатчика переходит на резервный экономичный режим работы только с одним исправным передатчиком. Для этого при помощи переключателя (3) выполняется подключение выхода исправного передатчика одновременно к входам работающей антенны курса и антенны глиссады. На выходах 6 сигнальных процессоров (11) и (16) формируются высокочастотные зондирующие импульсы (ЗИ) низкого уровня мощности, которые поступают соответственно на входы 1 и 2 переключателя (12). На выходы 3 и 4 переключателя (12) поступает один из входных ЗИ, который далее с указанных выходов поступает соответственно на входы передатчиков (1) и (2). Таким образом, переключатель (12) обеспечивает одновременную работу передатчиков (1) и (2).
В ПРЛ антенны курса и глиссады имеют ортогональные поляризационные свойства: антенна курса и дополнительная антенна курса являются горизонтально поляризованными, а антенна глиссады имеет вертикальную поляризацию.
С помощью антенны курса для одного направления посадки или дополнительной антенны курса для противоположного направления посадки и антенны глиссады, устанавливаемой в заданное направление посадки при помощи опорно-поворотного устройства глиссады, производится одновременный секторный обзор пространства соответственно в азимутальной (горизонтальной) и угломестной (вертикальной) плоскостях с центром в месте расположения ПРЛ вдоль ВПП аэродрома.
В отличие от прототипа для устранения ошибок определения угломестных координат низколетящих ВС в предлагаемом ПРЛ применяется обработка сигналов с использованием комплексной оценки угломестных координат ВС.
В прототипе в канале измерения угла места оценивается реальная составляющая нормированного разностного сигнала.

где Σ - суммарный сигнал; Δ - разностный сигнал; θ1 - это истинный геометрический угол отклонения цели относительно равносигнального направления (РСН).
Выражение (1/μ)(Δ/Σ) в левой части (2) - это формируемая в системе величина, которая рассматривается как оценка угловой координаты.
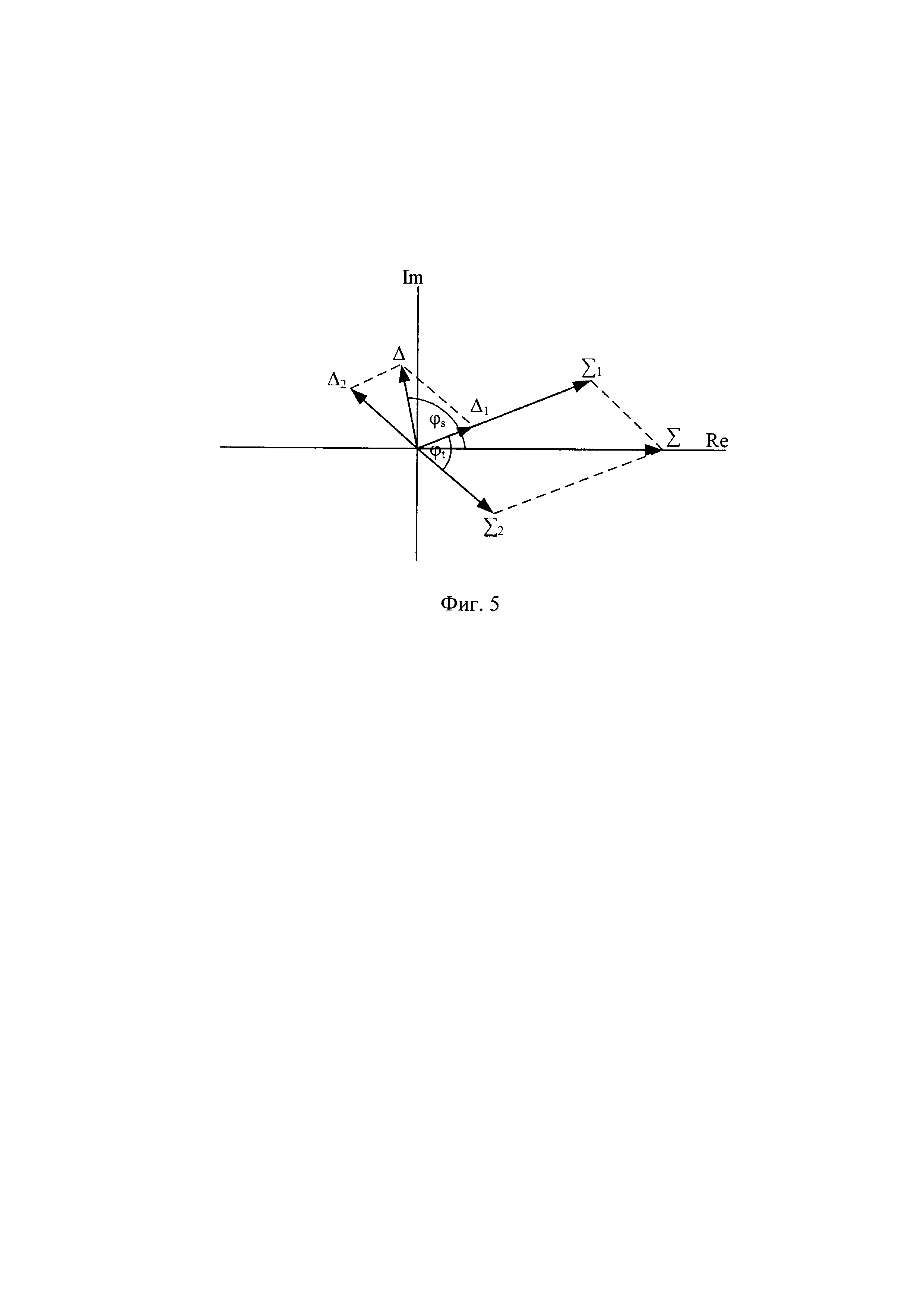
Цель и ее зеркальное отображение относительно земной поверхности можно считать, как две неразрешаемые цели, разнесенные на угол θ1 и угол θ2 соответственно относительно РСН. Векторное представление двух целей можно представить на комплексной плоскости (фиг. 5).
Для решения задачи устранения возникающей неоднозначности из-за пере отражений от земной поверхности в предлагаемом ПРЛ, помимо действительной составляющей, предлагается использовать квадратурную составляющую.
В случае наличия переотражений от земной поверхности выражение (2) носит комплексный характер.
Результирующий суммарный сигнал в соответствии с фиг. 5 равен

Для результирующего разностного сигнала справедливо следующее

Отношение векторов суммарных сигналов определяется выражением

где g - отношение квадратов коэффициентов усиления антенны по напряжению в направлениях на цель и ее зеркальное изображение; ϕ - относительная разность фаз отраженных сигналов от двух целей.
Используя формулы (3), (4), (5) на основании (2) оценка угла места ВС

Связав компоненты комплексной оценки углового положения цели с истинными геометрическими углами прихода прямого сигнала от цели и его зеркального отражения от земной поверхности, получаются следующие выражения


где θц - истинный угол места цели относительно горизонта; θрсн - угловое положение РСН относительно горизонта.
Тогда на основании (6) оценка углового отклонения ВС от РСН в угломестной плоскости определяется следующим выражением

где х - действительная составляющая Re(θi); у - мнимая составляющая Im(θi).
Относительная фаза имеет две составляющие

где ϕs - фаза коэффициента отражения ρ от поверхности, а Δϕ - разность фаз, соответствующая разности хода лучей, которая определяется выражением

где h - высота центра антенны над земной поверхностью, а λ - длина волны ПРЛ.
Поэтому, если измерять х и у при приеме одного импульса при известных значениях h, λ, ϕs, θрсн и заданной диаграмме направленности, можно вычислить комплексную оценку угла места как функцию угла места цели θц.
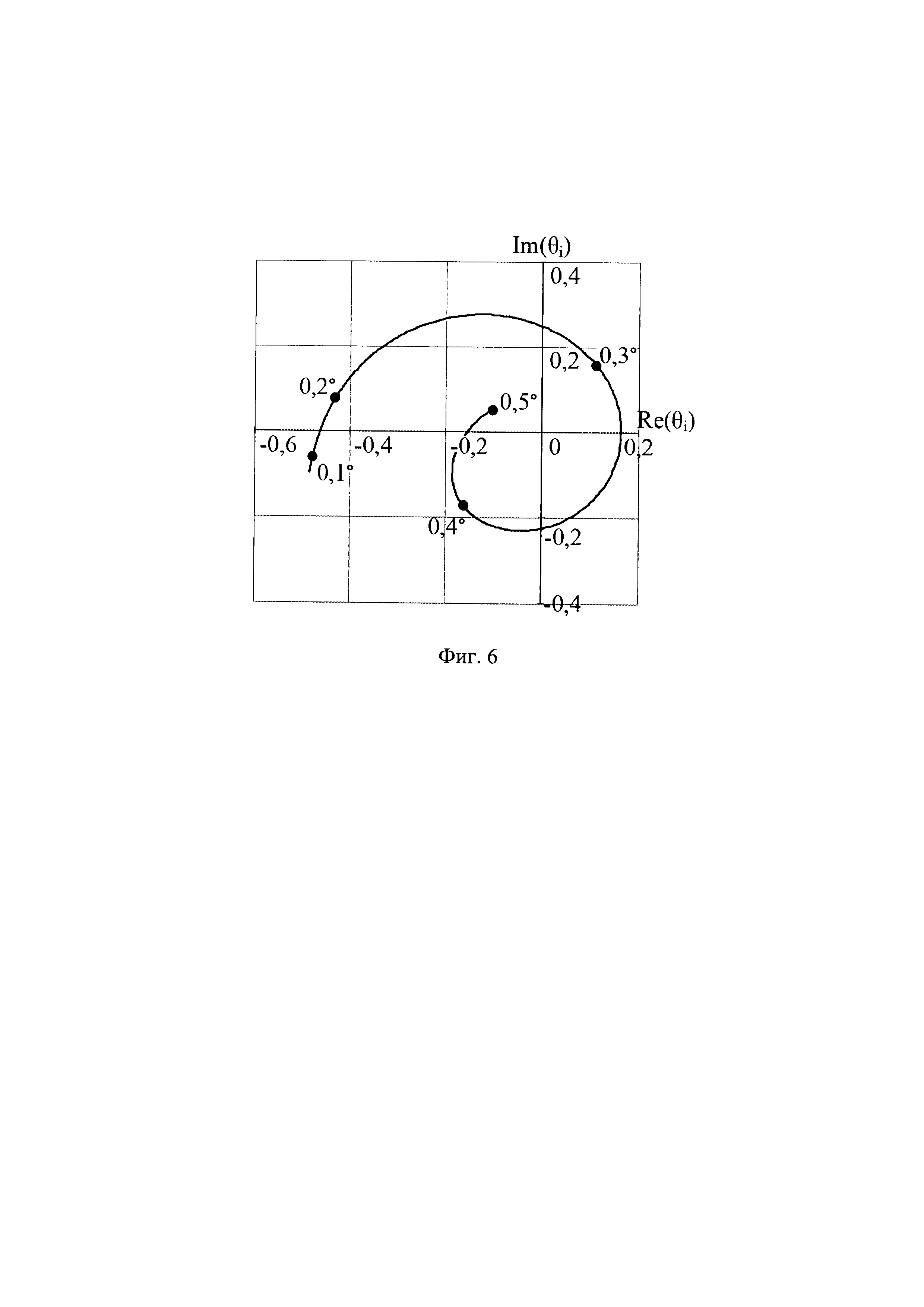
Таким образом, при заданных положениях РСН по углу места заранее рассчитываются калибровочные кривые, по которым однозначно определяется оценка угла места цели (фиг. 6). Полученные калибровочные кривые или соответствующие таблицы значений х и у используются для сравнения непосредственно с измеряемыми ПРЛ показателями во время захода ВС на посадку. В этом случае измерения комплексной оценки угла дают некоторую точку на калибровочной кривой, а величина θц, соответствующая этой точке, является углом места цели.
Для выделения квадратурной составляющей сигнал суммарного канала поступает с выхода 8 сигнального процессора (11) или (16) на вход 1 фазовращателя (22) или (26) соответственно, на выходе которого фаза сигнала поворачивается на 90 град., а также на вход 1 цифрового фазового детектора (24) или (28) соответственно. С выхода 7 сигнального процессора (11) или (16) сигнал разностного канала поступает на вход 2 цифровых фазовых детекторов (23) и (24) или (27) и (28) соответственно. С выхода 3 цифрового фазового детектора (23) или (27) поступает мнимая составляющая нормированного разностного сигнала на вход 1 модуля измерения координат (25) или (29) соответственно. С выхода 3 цифрового фазового детектора (24) или (28) поступает реальная составляющая нормированного разностного сигнала на вход 2 модуля измерения координат (25) или (29) соответственно. С выхода 4 устройства регистрации (19) на вход 3 модуля измерения координат (25) или (29) поступают известные параметры ПРЛ. В соответствии с входными параметрами модуль измерения координат (25) или (29) однозначно определяет угол места ВС. С выхода 4 модуля измерения координат (25) или (29) на вход 9 сигнального процессора (11) или (16) соответственно поступает сигнал однозначно определенного угла места ВС. На фиг. 6 представлен пример пеленгационной характеристики, определяющей однозначное измерение угла места низколетящих ВС при угловом положении равносигнального направления ПРЛ θрсн=0,5.
При помощи переключателя (12) высокочастотные зондирующие импульсы направляются на входы 1 передатчиков (1) и (2), где они усиливаются по мощности. Выходные импульсные сигналы передатчиков через переключатель (3) направляются к входам антенн курса (5) и глиссады (6) для излучения в пространство.
Радиолокационные сигналы, являющиеся результатом отражения зондирующих импульсов от воздушных судов и других объектов, через рабочую антенну курса и антенну глиссады поступают соответственно на переключатель (8) и переключатель (9).
С выхода переключателя (8) сигналы курса, а с выхода переключателя (9) сигналы глиссады поступают на соответствующие входы приемника (10), если работает канал А, или на входы приемника (15), если для работы выбран канал В. Выходные сигналы приемника на промежуточной частоте поступают в сигнальный процессор (11) или (16), где производится их аналого-цифровое преобразование, когерентная межпериодная частотная фильтрация на фоне шумов и пассивных помех, выполняется процедура обнаружения по критерию Неймана-Пирсона, обеспечивающему получение максимальной вероятности правильного обнаружения ВС при фиксированной вероятности ложных тревог по шумам и остаткам пассивных помех, временная взвешенная обработка, а также формирование плотов и оценка сферических координат (дальность, азимут и угол места) ВС. С выходов сигнального процессора суммарный и разностный сигналы поступают на фазовращатель, где фаза сигналов изменяется на 90 град. и фазовые детекторы, где выделяются действительная и мнимая оценки угломестных координат ВС, которые поступают на модуль измерения координат, где происходит однозначное вычисление угла места ВС. Полученные сигналы с выхода модуля измерителя координат поступают на сигнальный процессор.
В каналах А и В приемник, сигнальный процессор, фазовращатель, фазовые детекторы, модуль измерения координат, экстрактор и устройство управления и сопряжения объединены в блоки обработки информации А и В, образуя дублированную аппаратуру приема и обработки сигналов основного и резервного каналов.
Устройство регистрации производит запись (регистрацию) текущей радиолокационной информации, формируемой по каналам курса и глиссады на выходах 4 сигнального процессора (11) блока обработки информации А и сигнального процессора (16) блока обработки информации В. Одновременно записываемая (регистрируемая) информация отображается на технологическом дисплее посадочного радиолокатора.
В режиме воспроизведения записанная ранее радиолокационная информация поступает с выхода устройства регистрации на вход 3 технологического дисплея для воспроизведения с целью просмотра и анализа зарегистрированной окружающей воздушной обстановки в районе аэродрома.
На выходах 1-4 ПРЛ обеспечивается формирование дублированных каналов передачи данных на выносной командный диспетчерский пункт (КДП) управления воздушным движением в виде широкополосных линий передачи информации (Выходы 1 и 3 ПРЛ) и узкополосных линий передачи данных (Выходы 2 и 4 ПРЛ).
Переход на работу с одним каналом аппаратуры А или В при выходе из строя аппаратуры другого канала может производиться автоматически или вручную с технологического пульта управления ПРЛ или с рабочего места диспетчера на КДП в зависимости от состояния и режима эксплуатации ПРЛ.
Оперативное изменение направления посадки ВС осуществляется разворотом антенны курса и антенны глиссады в горизонтальной плоскости при помощи опорно-поворотного устройства (7).
Эффективность новой схемы построения ПРЛ подтверждена положительными результатами испытаний модернизированного образца, показавшими, что построение ПРЛ с использованием комплексного метода позволяет устранить неоднозначность определения угломестных координат низколетящих ВС и повысить точностные характеристики ПРЛ по каналу глиссады.
ЛИТЕРАТУРА
1. Описание ПРЛ-4 [онлайн, найдено в Интернете на http://hist.rloc.ru/lobanov/6_16_5.htm].
2. Описание ПРЛ-3Г найдено в монографии «П.С. Давыдов, А.А. Сосновский, И.А. Хаймович. Авиационная радиолокация. Справочник. Под редакцией П.С. Давыдова. - М., изд. «Транспорт», 1984 г. (с. 125)».
3. Описание РСП-6М2 [онлайн, найдено в Интернете на http://www.eandc.ru/news/detail.php?ID=18434 или на http://www.tcalet.ru/Produksia7.html].
4. Описание РСП-7 [онлайн, найдено в Интернете на http://museum.radioscanner.ru/avionika/aviomuzejs/rsp_7/rsp_7.html].
5. Описание ПРЛ-27С [онлайн, найдено в Интернете на http://www.vniira.ru/doc/catalogue/1188.pdf].
6. Описание AN/TPN-31 [онлайн, найдено в Интернете на http://www.fas.org/man/dod-101/sys/ac/equip/an-tpn-31.htm или на http://www.deagel.com/Special-Purpose-Vehicles/ANTPN-31-ATNAVICS_a000607001.aspx].
7. Описание PAR 2090С [онлайн, найдено в Интернете на http://www.selaxsas.com/EN/Common/files/SELEX_Galileo/Products/PAR_2090.pdf].
8. Описание RP-5M [онлайн, найдено в Интернете на http://www.eldis.cz/files/katalog_list/radar-RP-5M-en.pdf].
9. Федеральные авиационные правила «Радиотехническое обеспечение полетов и авиационная электросвязь. Сертификационные требования». - М., 1999 г. [онлайн, найдено в Интернете на http://www.stroyplan.ru/docs.php?showitem=6495#i106600].
10. Леонов, А.И. Моноимпульсная радиолокация / А.И. Леонов, К.И. Фомичев. - М.: Радиосвязь, 1984. - 312 с.
Посадочный радиолокатор, содержащий два идентичных приемо-передающих канала, которые состоят из передатчиков (1) и (2), приемников (10) и (15), сигнальных процессоров (11) и (16), причем выходы 5 приемников (10) и (15) подключены соответственно к входам 1 сигнальных процессоров (11) и (16), при этом выходы 7 сигнальных процессоров (11) и (16) подключены соответственно к входам 2 цифровых фазовых детекторов (23) и (24), (27) и (28), выходы 8 сигнальных процессоров (11) и (16) подключены соответственно к входам 1 фазовращателей (22) и (26), а также соответственно к входам 1 цифровых фазовых детекторов (24) и (28), выходы 2 фазовращателей (22) и (26) подключены соответственно к входам 1 цифровых фазовых детекторов (23) и (27), выходы 3 цифровых фазовых детекторов (23) и (27) подключены соответственно к входам 1 и 2 модулей измерения координат (25) и (29), выходы 3 цифровых фазовых детекторов (24) и (28) подключены соответственно к входам 2 модулей измерения координат (25) и (29), ПРЛ содержит антенну курса (5), антенну глиссады (4), опорно-поворотное устройство глиссады (7), на котором устанавливается антенна глиссады и управляющий вход которого подключается к соединенным вместе выходам 3 сигнальных процессоров (11) и (16), экстрактор (13), вход 1 которого подключен к выходу 2 сигнального процессора (11) канала А, технологический дисплей (20) и устройство регистрации (19), входы 1 которых соединены и подключены к выходу 2 экстрактора (13), а входы 2 соединены и подключены к соединенным вместе выходам 4 сигнальных процессоров (11) и (16), выход 5 сигнального процессора (11) является выходом 1 ПРЛ, ПРЛ содержит дополнительную антенну курса (6), дополнительный экстрактор (17), вход 1 которого подключен к выходу 2 сигнального процессора (16), переключатели (3), (8), (9) и (12), устройства управления и сопряжения каналов (14) и (18), а также технологический пульт управления (21), причем входы 3 антенны курса (5), дополнительной антенны курса (6) и антенны глиссады (4) подключены соответственно к выходам 3, 4 и 5 переключателя (3), входы 1 и 2 которого подключены соответственно к выходам 2 передатчиков (1) и (2), входы 1 которых подключены соответственно к выходам 3 и 4 переключателя (12), входы 1 и 2 которого подключены соответственно к выходам 6 сигнальных процессоров (11) и (16), выходы 1 и 2 антенны курса (5) подключены соответственно к входам 1 и 2 переключателя (8), входы 3 и 4 которого подключены к выходам 1 и 2 дополнительной антенны курса (6), а выходы 5, 6, 7 и 8 подключены соответственно к входам 1 и 2 приемника (10) и входам 1 и 2 приемника (15), выходы 1 и 2 антенны глиссады (4) подключены соответственно к входам 1 и 2 переключателя (9), выходы 3, 4, 5 и 6 которого подключены соответственно к входам 3 и 4 приемника (10) и входам 3 и 4 приемника (15), выходы 2 экстрактора (13) и дополнительного экстрактора (17) соединены вместе и подключены к соединенным вместе входам 1 устройств управления и сопряжения (14) и (18), а также к входам 1 устройства регистрации (19) и технологического дисплея (20), выход 4 устройства регистрации (19) подключен к входам 3 модулей измерения координат (25) и (29), выходы 4 которых подключены к входам 9 сигнальных процессоров (11) и (16), входы 2 устройств управления и сопряжения (14) и (18) соединены вместе и подключены к выходу 1 технологического пульта управления (21), выход 5 сигнального процессора (16) является выходом 3 ПРЛ, а выходы устройств управления и сопряжения (14) и (18) являются соответственно выходами 2 и 4 ПРЛ, аппаратуру приема и обработки сигналов каналов А и В, включающую приемник, сигнальный процессор, экстрактор, устройство управления и сопряжения, отличающуюся тем, что дополнительно содержит фазовращатель, два цифровых фазовых детектора, модуль измерения координат, выполненную в виде двух автономных блоков обработки информации А и В и реализующую моноимпульсную обработку сигналов с использованием квадратурных составляющих нормированного разностного сигнала по отношению к суммарному на комплексной плоскости.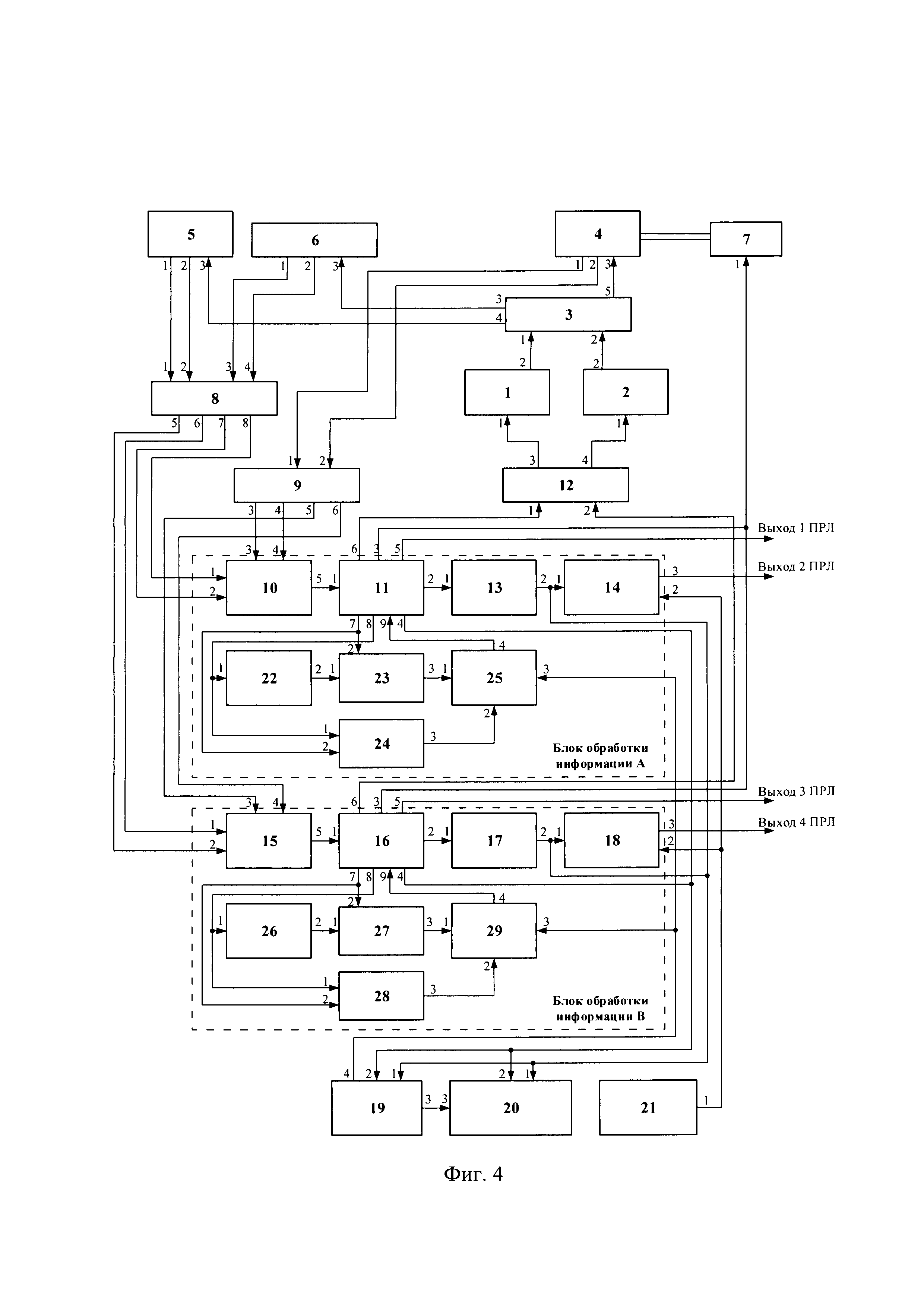
Способ управления летательным аппаратом при заходе на посадку
Стабилизатор переменного тока
Устройство формирования мощных свч-импульсов
Модулятор импульсов
Модулятор импульсного передатчика
Устройство обработки фазоманипулированных радиолокационных сигналов
Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере земли и их диспетчерского контроля
Стабилизатор напряжения аппаратуры электропитания посадочного радиолокатора
Интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов
Устройство для наблюдения за саранчой, летящей в рое
Посадочный радиолокатор
Устройство обработки фазоманипулированных радиолокационных сигналов
Способ управления воздушным движением летательных аппаратов в районе аэродрома
Стабилизатор напряжения аппаратуры электропитания посадочного радиолокатора
Аэродромный радиолокационный комплекс управления воздушным движением
Устройство доплеровской обработки и сжатия фазоманипулированных радиолокационных сигналов
Устройство контроля мощности и ксвн свч трактов передатчиков
Способ получения стойкого композиционного покрытия на металлических деталях

