Результат интеллектуальной деятельности: СТАБИЛИЗАТОР НАПРЯЖЕНИЯ АППАРАТУРЫ ЭЛЕКТРОПИТАНИЯ ПОСАДОЧНОГО РАДИОЛОКАТОРА
Вид РИД
Изобретение
Изобретение относится к электротехнике и может использоваться в аппаратуре электропитания посадочного радиолокатора.
Известна система электропитания посадочного радиолокатора [1, 2, 3, 4] состоящая из ввода внешней сети, защитно-распределительного блока, первого преобразователя из переменного в постоянный ток (AC-DC), питающих передающее устройство, второго преобразователя из переменного в переменный ток (АС-АС), питающего привод вращения антенно-мачтового устройства, третьего преобразователя типа AC-DC, подключенного к аккумулятору, питающему ЭВМ, последовательно включенных четвертого преобразователя типа AC-DC и пятого преобразователя из постоянного в постоянный ток (DC-DC), питающих аппаратуру радиолокационной станции с соответствующими связями. AC-DC преобразователь из состава аппаратуры электропитания посадочного радиолокатора [3], питающей передающее устройство, содержит блоки управления БУ ПРД [4], в состав которого входят стабилизаторы напряжения, которые обеспечивают работу устройств, входящих в аппаратуру электропитания посадочного радиолокатора.
Известны стабилизаторы напряжения (СН), содержащие силовую последовательную цепь из регулирующего элемента и энергонакопительного дросселя, узла управления, выходного конденсатора и коммутирующего элемента.
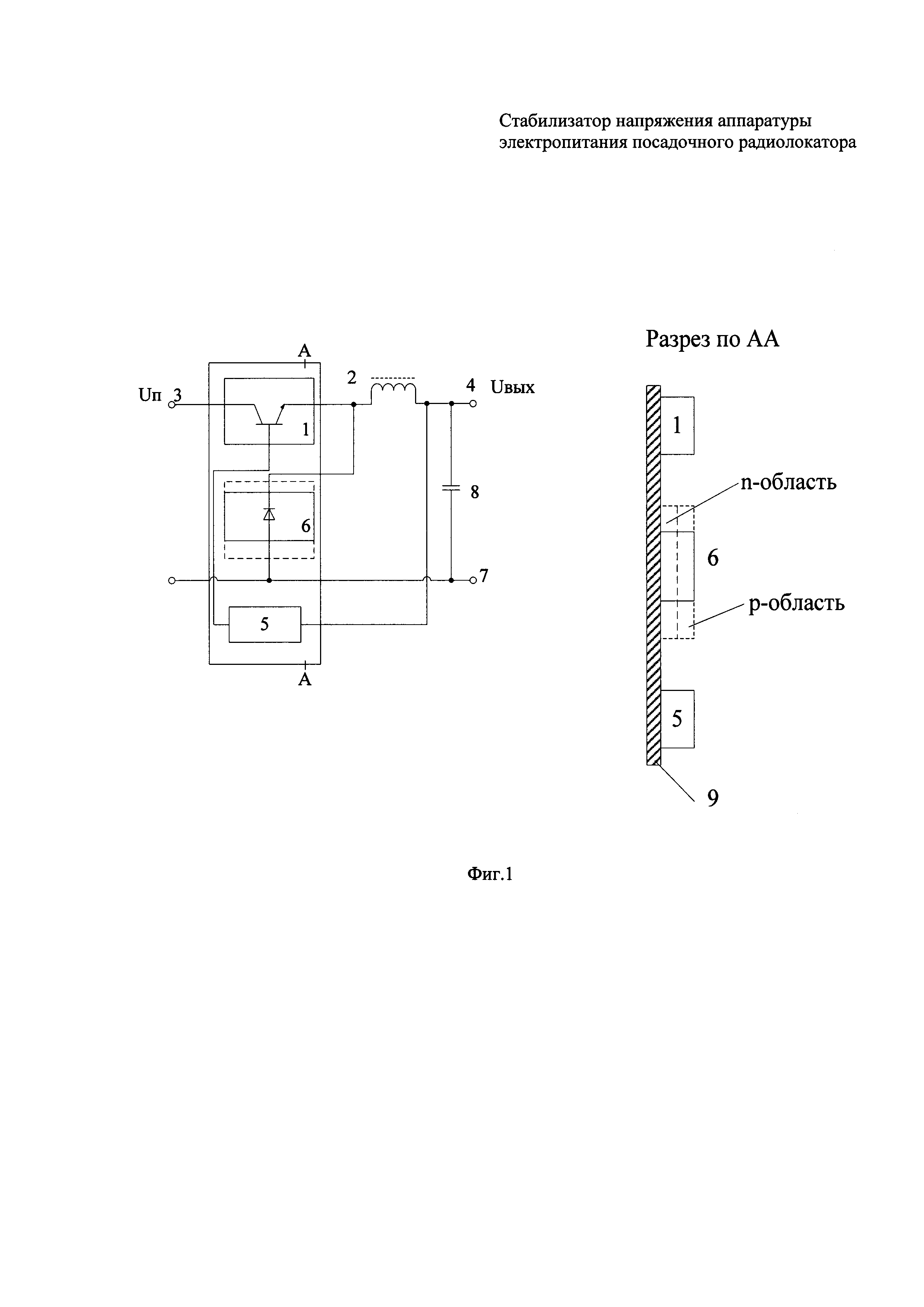
Наиболее близким по технической сущности к предложенному решению является СН фиг. 1, содержащий силовую последовательную цепь из регулирующего элемента и энергонакопительного дросселя, подключенную между потенциальной входной и выходной клеммами, узел управления, вход которого подключен к выходу стабилизатора, а выход - к управляющему входу регулирующего элемента, диодный коммутирующий элемент, включенный между точкой соединения регулирующего элемента и энергонакопительного дросселя и другой выходной клеммой, и выходной конденсатор, включенный между двум выходными клеммами [7].
Выполнение диодного коммутирующего элемента производится исходя из значения номинального тока нагрузки - подбирается диод с аналогичным током в прямом направлении, что не оптимально по КПД.
На КПД влияют значения как номинального тока нагрузки, так и входного напряжения питания, что требует при выполнении упомянутого элемента учета на только статических, но и динамических режимов СН.
Целью изобретения является повышение КПД стабилизатора напряжения.
Поставленная цель достигается тем, что упомянутый коммутирующий элемент выполнен на основе диодной твердотельной структуры с площадью рабочей поверхности равной произведению постоянного коэффициента структуры, номинального тока нагрузки и отношения времен закрытого и открытого состояний регулирующего элемента.
Предлагаются варианты формирования диодной твердотельной структуры путем параллельного соединения элементарных структур с суммарной площадью поверхности, равной требуемой площади диодной твердотельной структуры.
Такой принцип построения СН является новым, неизвестным из литературных данных, как в полупроводниковой технике, так и в технике источников питания, так как площадь рабочей поверхности диодного коммутирующего элемента (ДКЭ) в общем случае является переменной величиной, жестко связанной с конкретными электрическими параметрами СН, а выполнение ДКЭ необходимо проводить на основе полуфабриката диодной твердотельной структуры, площадь поверхности которой выбирается индивидуально в зависимости от упомянутых параметров СН.
Найденное соотношение для определения оптимальной поверхности ДКЭ определяет существенное отличие заявленного решения.
На фиг. 2 представлена объединенная конструктивная и электрическая схема СН, понижающего напряжение сети (Пн СН), которая содержит силовую цепь из регулирующего элемента 1 и энергонакопительного дросселя 2, подключенную между потенциальной входной клеммой 3 и выходной клеммой 4, узел управления 5, входом подключенный к выходу стабилизатора, а выходом к управляющему входу регулирующего элемента 2, диодный коммутирующий элемент 6, выполненного во виде параллельно соединенных элементных структур, включенный между точкой соединения регулирующего элемента 1 и энргонакопительного дросселя 2 и другой выходной клеммой 7, к выходу подключен выходной конденсатор 8.
ДКЭ 6 выполнен на основе полуфабриката диодной твердотельной структуры (в данном случае р-n перехода). Характерным для диодной твердотельной структуры является распределение носителей заряда по закону Максвелла-Больцмана. В этом случае независимо от конкретного вида структуры (барьер Шоттки, гетеропереход и т.д.) площадь ее рабочей поверхности выполняется равной произведению постоянного коэффициента структуры, номинального тока нагрузки и отношения времен закрытого и открытого состояний регулирующего элемента.
Выполнение других полупроводниковых узлов - 1 и 5 - может производиться любым известным способом.
На разрезе по АА фиг. 1 узлы 1, 5 представлены в бескорпусном варианте, в виде плоских твердотельных сборок и микросхем, размещенных на общей теплорассеивающей подложке 9 с коммутирующим элементом 6.
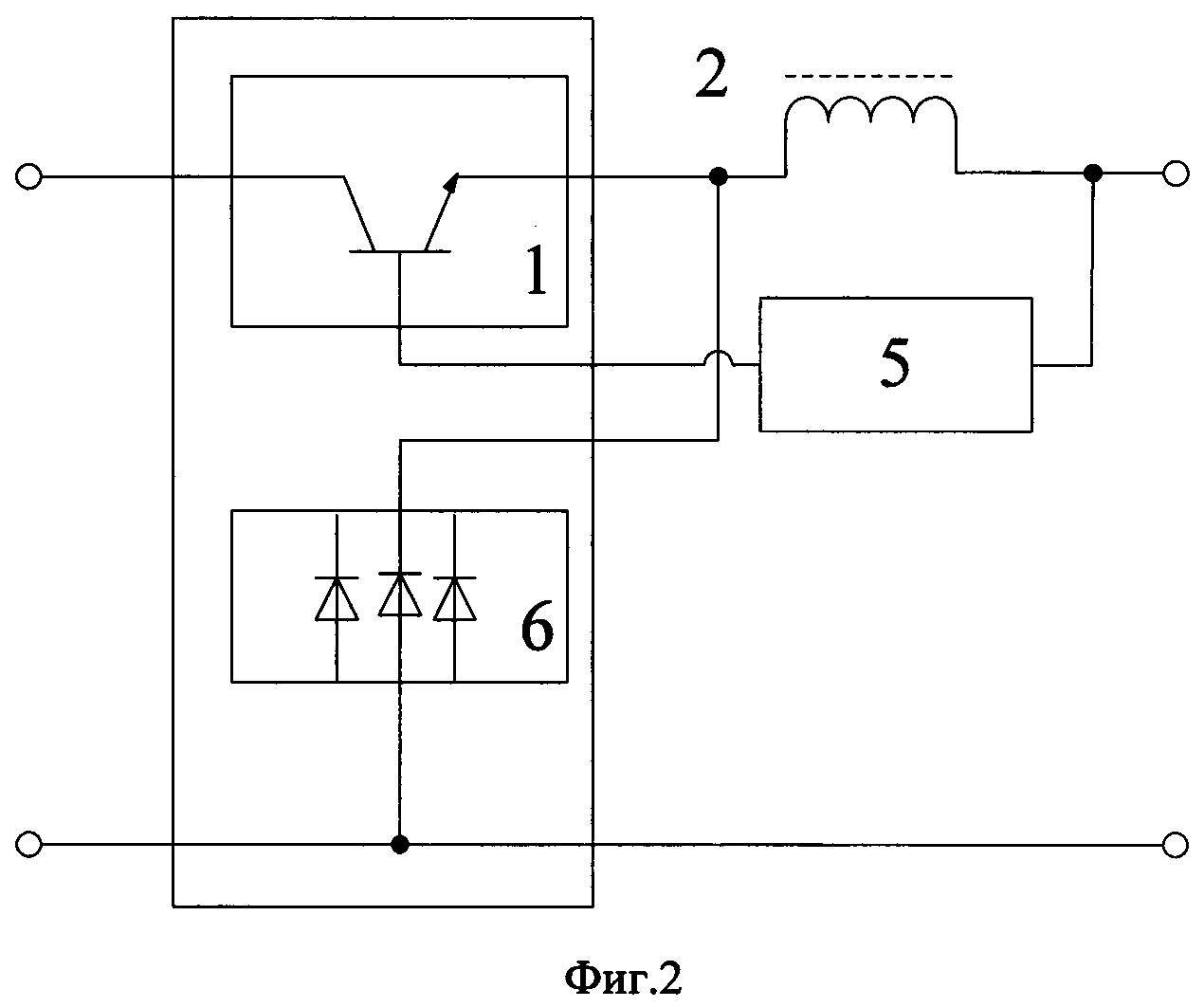
Физическое объяснение предложенного выполнения ДКЭ в виде параллельно соединенных элементных структур заключается в следующем: общие потери энергии в ДКЭ - PΣ - определяются потерями как в прямом (Рпр), так и в обратном (Робр) направлениях. Однако, при описываемой диодной структуре потери в прямом направлении, точнее прямое напряжение Uпр - является функцией от обратного тока Iо6р, причем Uпp уменьшается с увеличением Iо6р, тогда как Робр при этом увеличивается.
Величина iобp для данной структуры с постоянной плотностью обратного тока io6p определяется величиной рабочей поверхности структуры S.
Таким образом, для данной структуры существует всегда оптимальная площадь рабочей поверхности Sр, зависящая от токов нагрузки Iн и режима коммутации - времен открытого (tо) и закрытого (tз) состояний регулирующего элемента, при которой величина PΣ - минимальная.
Ниже приведены теоретические выкладки, подтверждающие вышесказанное.
Для рассматриваемого класса диодных твердотельных структур [6], вольтамперная характеристика может быть обобщена в виде:

где Iд - среднее значение диодного тока за время,
U - напряжение на диоде,
ϕ0 - тепловой потенциал,
n - коэффициент неидеальности структуры.
Величина iобp в общем случае является величиной, зависящей от Uобp, при этом наиболее типовые зависимости iобp - следующие:
1. iобр=is=const при (Uобр)>>ϕ0 - для классических р-n перехода и контакта металл-полупроводник [6].
2.  - при учете процессов генерации рекомбинации в р-n переходе,
- при учете процессов генерации рекомбинации в р-n переходе,
iR ~ Uoбp - при наличии утечек в р-n переходе и для гетеропереходов [6].
При оценке режимов в прямом направлении имеем

Потери в прямом направлении определяются в виде [6]:

где  Т - период коммутации,
Т - период коммутации,

Из (1) с учетом (2) имеем:

В обратном направлении потери определяются в виде:

Не учитывая коммутационные потери, которые всегда можно существенно уменьшить по сравнению с Рпр и Робр, суммарные потери можно представить с учетом (4)-(6) в виде:

Таким образом, из (7) очевидно, что так как с возрастанием S потери в прямом направлении уменьшаются, а потери в обратном направлении увеличиваются, то существует минимальное значение РΣ при некотором оптимальном Sр.
Определяя из (7) экстремум функции РΣ, находим значение Sp.
В табл. 1 представлены для типовых схем стабилизаторов уравнения для величин Р, U,  с использованием рассчитанных ранее известных уравнений для стабилизаторов. При этом предполагается, что
с использованием рассчитанных ранее известных уравнений для стабилизаторов. При этом предполагается, что  где r0 - удельное динамическое сопротивление структуры диода в обратном направлении. Полагается также, что напряжение питания схемы много больше напряжения насыщения регулируемого элемента, тогда Ubx=Uп. На фиг. 3 иллюстрируются зависимости потерь от величины S.
где r0 - удельное динамическое сопротивление структуры диода в обратном направлении. Полагается также, что напряжение питания схемы много больше напряжения насыщения регулируемого элемента, тогда Ubx=Uп. На фиг. 3 иллюстрируются зависимости потерь от величины S.
Приведенные выше уравнения для понижающего (Пн) и повышающего (Пв) СН сведены в таблицу 1.
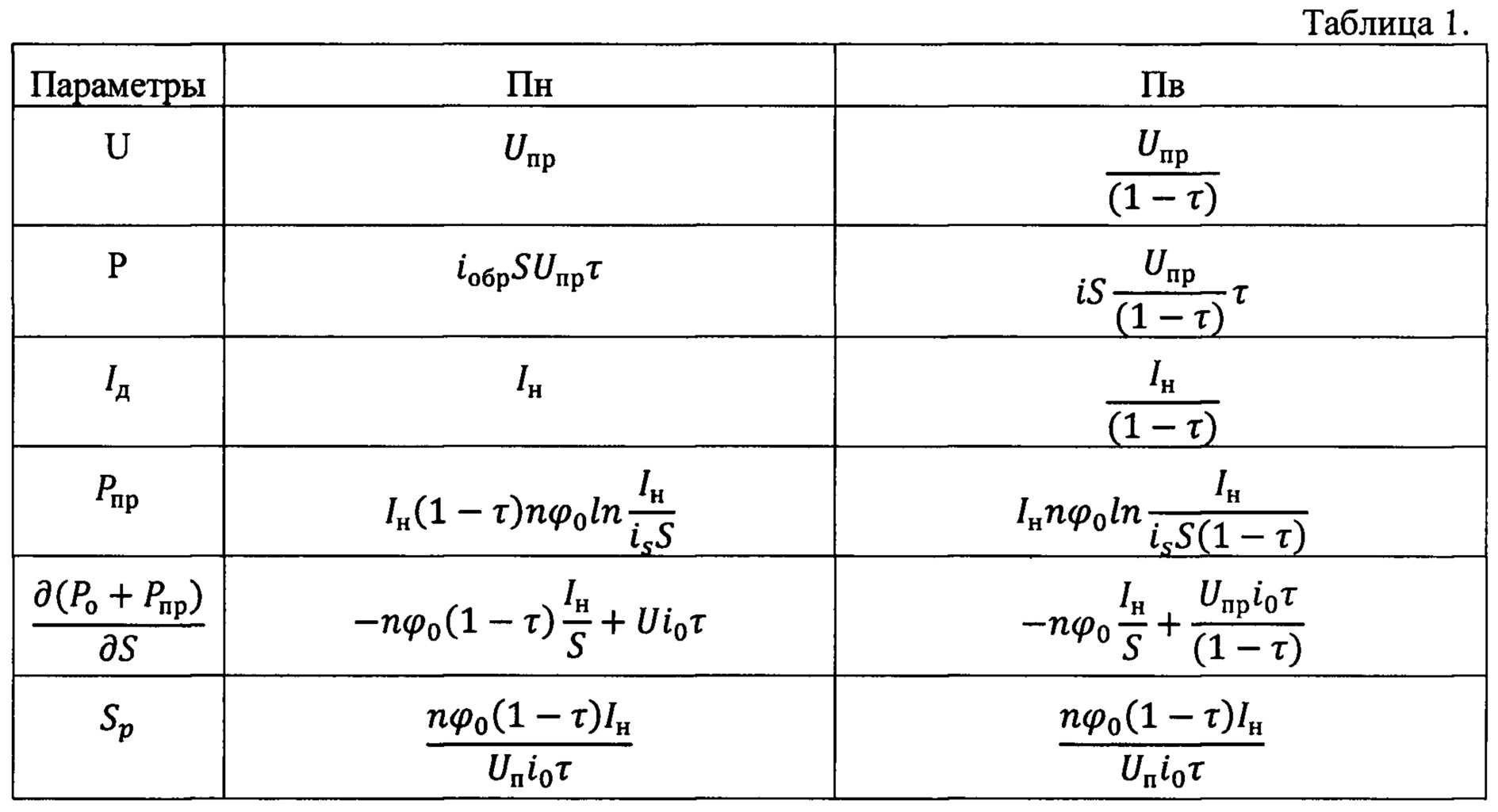
Из уравнений, представленных в табл. 1, следует, что оптимальная площадь рабочей поверхности Sp для СН описывается одним уравнением. Представляя i0 в виде:
получим обобщенное уравнение в виде

Или (8) можно представить, используя (4), в виде:

где  - постоянный коэффициент структуры (при заданном входном и выходном напряжениях).
- постоянный коэффициент структуры (при заданном входном и выходном напряжениях).
Таким образом, уравнение (9) определяет величину Sp в соответствие полученными решениями.
В случае использования элементарных структур с рабочей поверхностью, меньшей Sp, следует использовать параллельное соединение их, чтобы площадь суммарной рабочей поверхности была равна Sp, а при идентичности таких структур, чтобы суммарная поверхность элементарных структур была связана с их числом N соотношением:

где Sд - площадь элементарной структуры.
Из уравнения (5) вычислим: nϕ0=0.12 В, из (3-7) определим величину РΣ при S=kSд, где k = 1; 2; 3; 5. Данные расчетов приведены в таблице:

Сравнение расчетных данных с экспериментальными, полученными при испытании СН приведенного на фиг. 2 с параметрами Uп=+27 В; Uн=5 В; Iн=3 А, τ=0.2 и при использовании кремниевых структур на основе диодов Шоттки (Iк0=iк0Sд=20⋅10-3 А, Uпp=0.6 В), показали достаточность для практического использования при совпадение ≤ 5%, причем повышение КПД составляет более 10%, таким образом увеличение КПД, учитывая количество используемых стабилизаторов напряжения улучшает показатели работы посадочного радиолокатора.
Источники литературы
1. РШПИ.462725.001 Э4 - Схема электрических соединений
2. РШПИ.468324.011 Э3 Схема электрическая принципиальная
3. РШПИ.462725.001 Модуль ПРЛ-27С
4. РШПИ.468324.011 ТУ БУ ПРД
5. Б.В. Кабелев. Высокочастотные конвенторы на мощных МДП-транзисторах. В сб. Электронная техника в автоматике вып. 15, 1984, стр. 24, рис. 2.
6. ЗИ. Физика полупроводниковых приборов. «Мир», 1984, т. 1, стр. 325-429.
7. Источники вторичного электропитания под ред. Ю.И. Конева, М, «Сов. Радио», 1983 г., стр. 80-94.
Стабилизатор напряжения аппаратуры электропитания посадочного радиолокатора, содержащий силовую последовательную цепь из регулирующего элемента и энергонакопительного дросселя, подключенную между потенциальной входной клеммой и одной из выходных клемм, узел управления, вход которого подключен к выходу стабилизатора, а выход - к управляющему входу регулирующего элемента, диодный коммутирующий элемент, включенный между точкой соединения регулирующего элемента и энергонакопительного дросселя и другой выходной клеммой, и выходной конденсатор, отличающийся тем, что диодный коммутирующий элемент выполнен на основе диодной твердотельной структуры с площадью рабочей поверхности, пропорциональной произведению постоянного коэффициента структуры, номинального тока нагрузки и отношения времен закрытого и открытого состояний регулирующего элемента.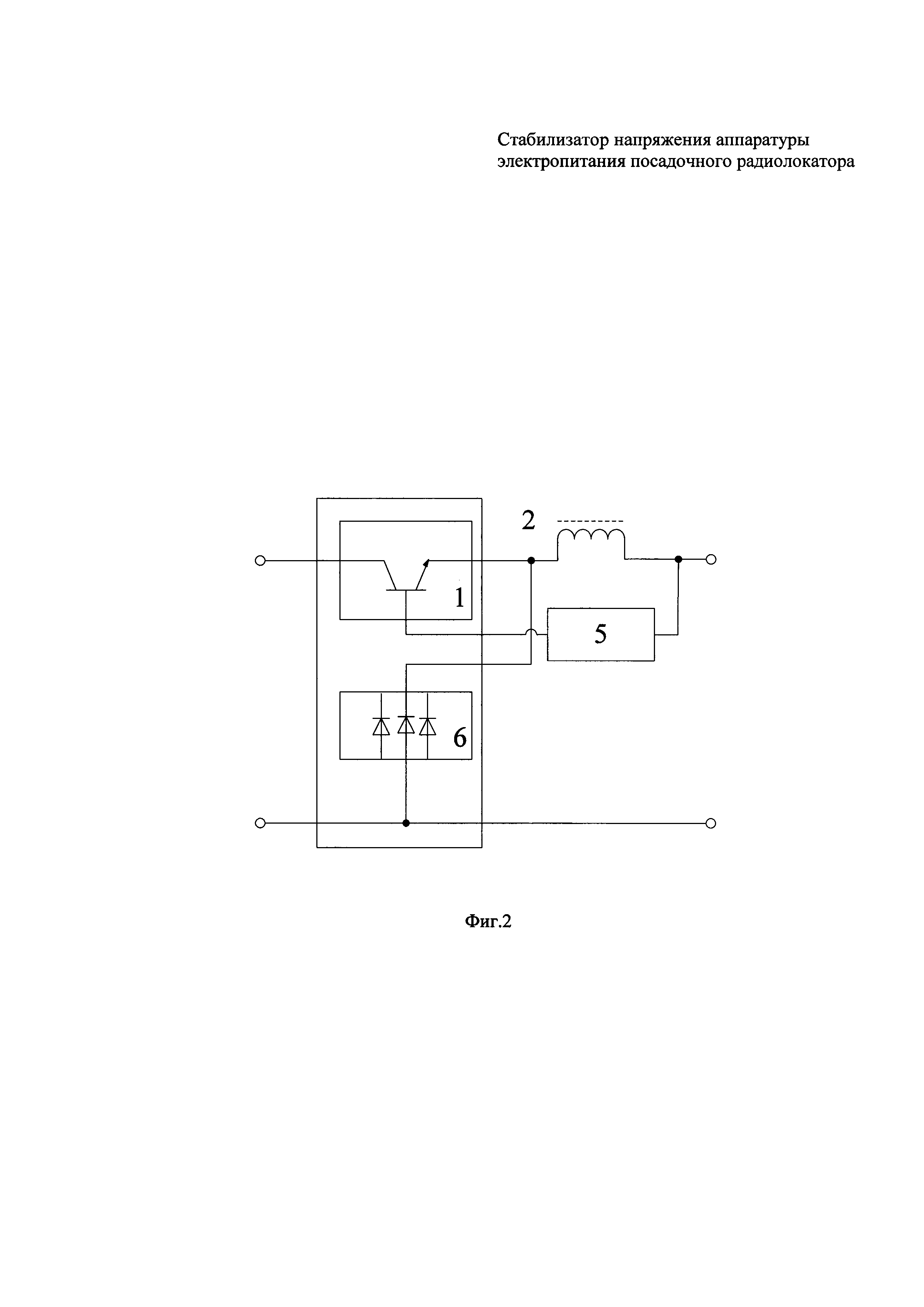
Способ управления летательным аппаратом при заходе на посадку
Стабилизатор переменного тока
Устройство формирования мощных свч-импульсов
Модулятор импульсов
Модулятор импульсного передатчика
Устройство обработки фазоманипулированных радиолокационных сигналов
Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере земли и их диспетчерского контроля
Интегрированная автоматизированная система контроля и управления средствами поисково-спасательного обеспечения спускаемых космических аппаратов
Устройство для наблюдения за саранчой, летящей в рое
Высоковольтное измерительное устройство
Дальномерная радиотехническая система ближней навигации летательных аппаратов
Комплексный способ навигации летательных аппаратов
Способ инерциально-спутниковой навигации летательных аппаратов
Комплексный способ навигации летательных аппаратов
Способ определения относительного положения летательных аппаратов при межсамолетной навигации
Стабилизатор переменного тока
Устройство формирования мощных свч-импульсов
Модулятор импульсов
Модулятор импульсного передатчика
Способ определения относительного положения при межсамолетной навигации

