Результат интеллектуальной деятельности: Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации
Вид РИД
Изобретение
Изобретение относится к области измерительной техники и может быть использовано для определения значения динамической погрешности магнитного компаса (далее - МК), вызванной качкой, при его лабораторных испытаниях, воспроизводящих режимы, приближенные к условиям эксплуатации.
Известно устройство для оценки динамических погрешностей малогабаритных инерциальных систем [Патент РФ №2554631]. Стенд предназначен для выработки угловых колебаний в двух плоскостях, изменяющихся по гармоническому закону в расширенном частотном диапазоне. Он представляет собой раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе. Система управления позволяет с помощью управляющего компьютера и установленного на нем программного обеспечения управлять режимами работы стенда. Недостаток указанного устройства заключается в том, что стенд воспроизводит только угловые колебания, без дополнительного воздействия на испытываемый прибор магнитного поля, кроме того он не может воспроизводить угловые колебания в заданном спектре частот.
Известен способ определения динамических погрешностей микромеханических инерциальных датчиков и модулей на их основе [Патент РФ №2546983; Д.Г. Грязин, О.О. Величко. Оценка характеристик микромеханических датчиков и модулей при их групповом изготовлении. Метод и его техническая реализация // Нано- и микросистемная техника. - 2015, №5(178), С. 37-44]. Исследуемый датчик или модуль устанавливается на стенд, способный воспроизводить колебания в заданном спектре частот, охватывающем весь частотный диапазон работы исследуемого объекта. При этом стендом задаются колебания со спектром частот, соответствующим конкретным условиям эксплуатации, и производится запись данных от стенда и характеристик, воспроизводимых датчиком или модулем. Полученные данные с помощью преобразования Фурье переводятся в частотную область для вычисления спектральной плотности мощности сигналов. Спектры входного сигнала со стенда и выходного сигнала датчика или модуля сравниваются для определения значения СКО динамической погрешности датчика или модуля во всем частотном диапазоне его работы.
Данный способ принят за прототип предлагаемого изобретения.
Указанный прототип позволяет воспроизводить колебания платформы со спектром частот, соответствующим спектру качки судна, однако не предназначен для работы с МК, так как не имеет соответствующего подвеса и использует привод постоянного тока. Кроме того он не позволяет имитировать воздействие магнитного поля с заданными параметрами на котелок МК. Воздействие магнитного поля является особенно важным для оценки динамической погрешности МК в высоких широтах при воздействии на МК малого значения горизонтальной и большого значения вертикальной составляющих магнитного поля Земли. Следовательно, прототип не позволяет воспроизводить условия, приближенные к реальным условиям эксплуатации МК, и, соответственно, определять погрешность измерения магнитного курса на качке при работе в условиях магнитного поля с заданными параметрами.
Решаемая техническая проблема - совершенствование стендового оборудования для определения динамической погрешности МК, вызванной качкой по одной оси.
Достигаемый технический результат - определение значения СКО динамической погрешности измерения магнитного курса с помощью МК, работающего в условиях одноосной качки при воздействии магнитного поля с заданными параметрами.
Технический результат достигается следующим образом.
Исследуемый МК устанавливается на стенд, способный воспроизводить колебания в спектре частот в условиях магнитного поля с заданными параметрами. Угловые одноосные колебания задаются со спектром, соответствующим условиям эксплуатации, а направление вектора и значение напряженности магнитного поля соответствуют выбранным координатам места судна. Производится запись показаний МК, которые представляют собой совокупность постоянного сигнала магнитного курса и переменного значения погрешности. Эти данные могут быть получены как от датчика магнитного курса МК, предназначенного для дистанционной передачи курса, так и от специально устанавливаемых для эксперимента средств, например телекамеры. При этом угол курса не изменяется, а девиация от металлических частей стенда отсутствует. По переменной составляющей записанной реализации от МК определяется среднеквадратическое значение погрешности σ, а также и значение ее дисперсии D=σ2.
Таким образом, предлагаемый способ заключается в следующем:
1. Котелок МК устанавливается в стенд для воспроизведения реальных условий эксплуатации прибора.
2. Задается вектор магнитного поля, необходимой напряженности и направления.
3. Воспроизводятся одноосные колебания со спектром, соответствующим качке реального судна на заданном волнении.
4. От МК записывается реализация измеренных во времени значений магнитного курса.
5. По переменной составляющей записанной реализации с помощью компьютерной программы определяется среднеквадратическое значение погрешности σ, а также и значение ее дисперсии D=σ2.
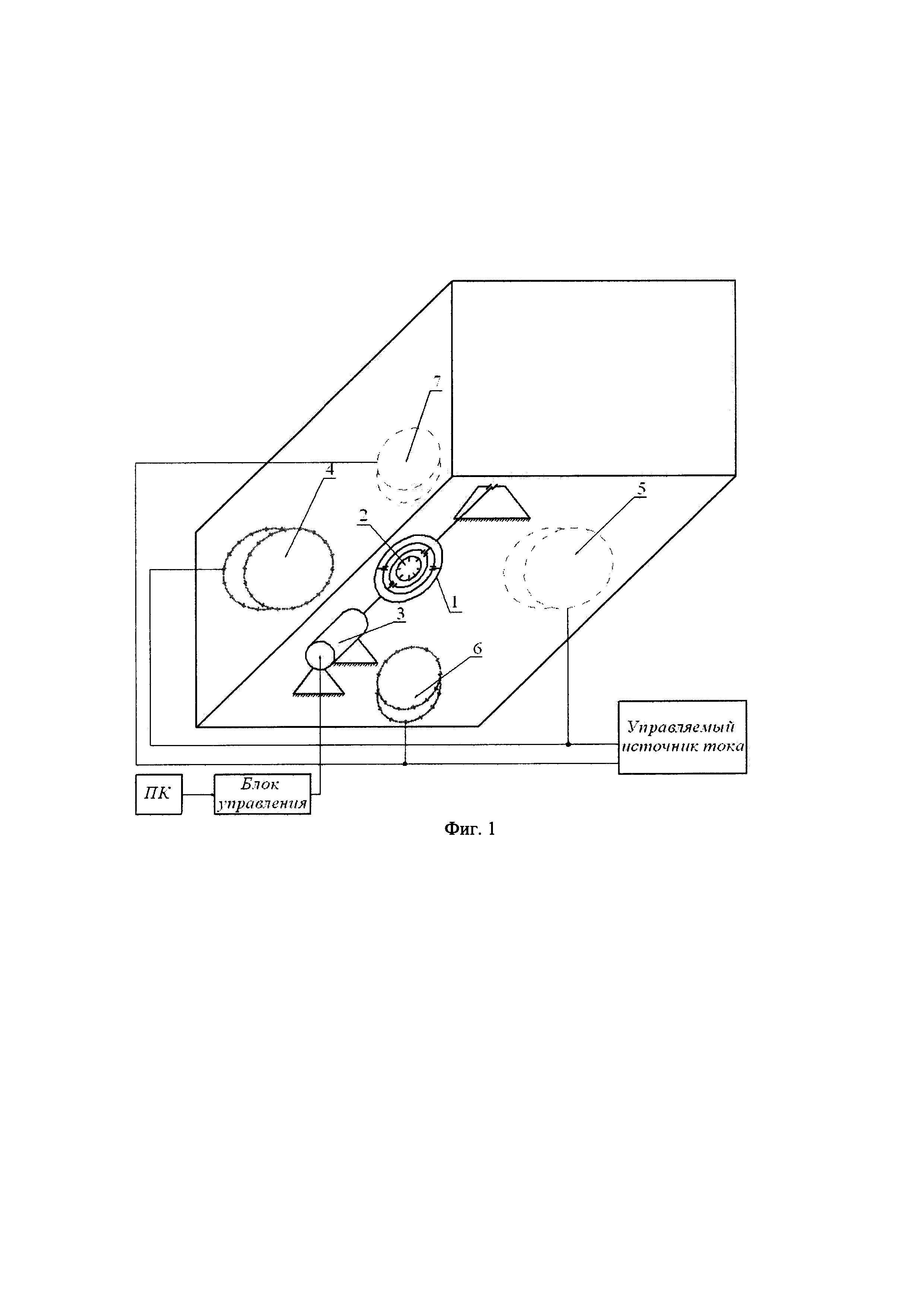
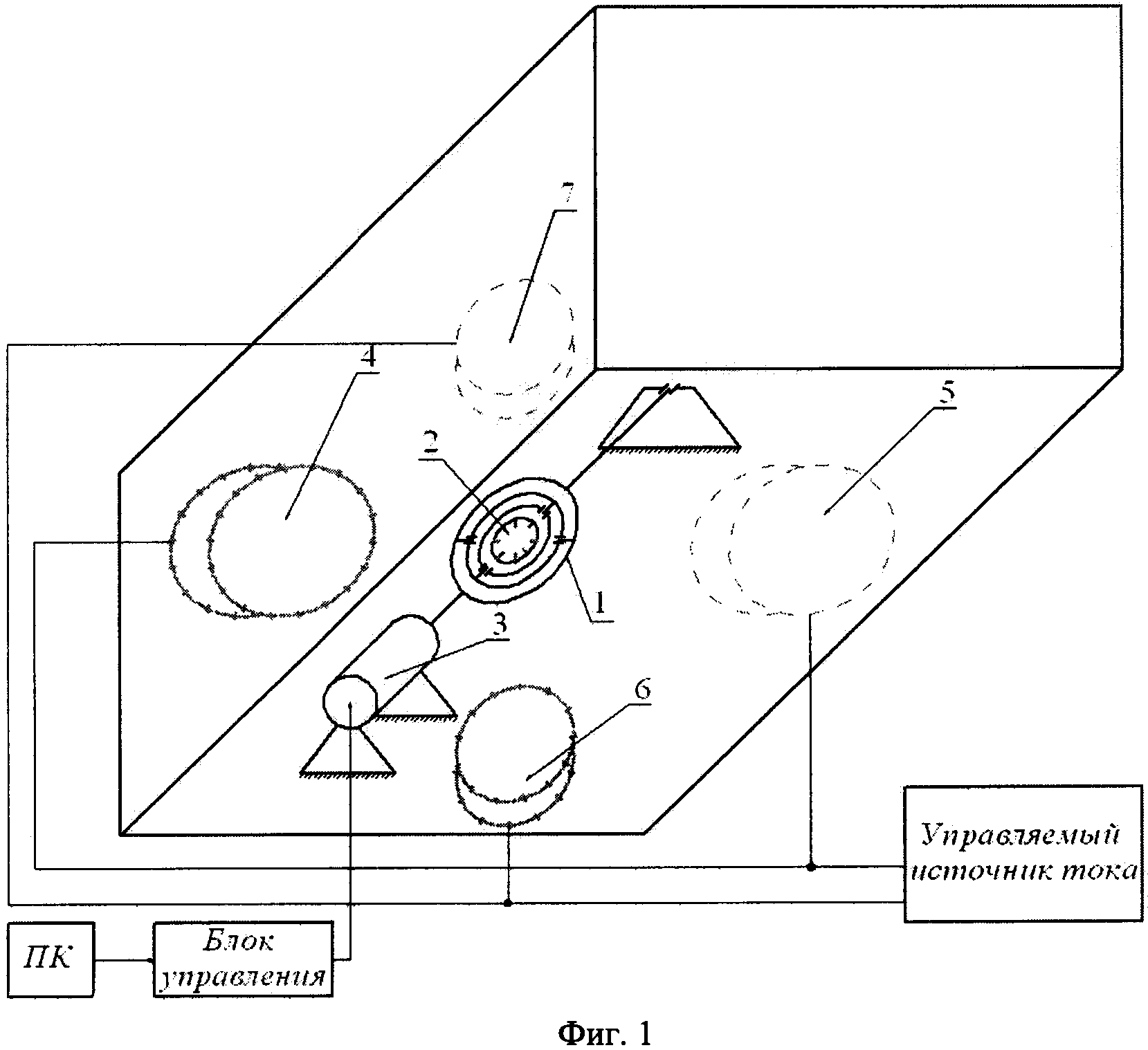
На фиг. 1 показано устройство для реализации заявляемого способа, на котором 1 - двухстепенной карданов подвес (далее подвес), внешнее кольцо которого совершает угловые колебания. На внутреннем кольце подвеса закреплен котелок МК 2. Угловые колебания внешнего кольца производятся в заданном спектре частот с помощью привода переменного тока 3, управляемого от блока управления персональным компьютером. Необходимая напряженность постоянного магнитного поля и его вектор, соответствующие широте места судна задаются полем от двух пар катушек 4-5 и 6-7, расположенных симметрично, относительно карданова подвеса котелка МК - 2. Указанные катушки связаны с управляемым источником тока. Значения курса, во время режима измерений, снимаются со штатного датчика магнитного курса компаса, установленного в его котелке и предназначенного для дистанционной передачи сигнала курса.
Задание колебаний в спектре частот при воздействии магнитного поля с заданными параметрами позволяет сократить время и повысить достоверность определения динамической погрешности МК применительно к конкретным условиям его эксплуатации.
Экспериментальные исследования способа и устройства производились с использованием котелка МК "Азимут КМ-05Д", который был установлен в стенд. При воспроизведении случайной качки со спектром, включающим диапазон периодов от 6 до 15 секунд. с амплитудой до ±22,5°, при значении горизонтальной составляющей магнитного поля Н=7,96 А/м, что может соответствовать широте 72°N значение σ составило 0,66°, а при значении Н=2,39 А/м - σ=3,3°, что может соответствовать широте от 77 до 87°N. Указанные полученные значения СКО соответствует расчетным значениям этой погрешности.
Таким образом, заявленный технический результат считается достигнутым.
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Стенд для выработки угловых колебаний в двух плоскостях
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Способ обнаружения и сопровождения целей циклически работающей системой наблюдения, состоящей из нескольких разнородных приемных каналов
Микромеханический вибрационный гироскоп
Способ определения погрешностей двухстепенного поплавкового гироскопа с газодинамическим подвесом ротора гиромотора
Способ бесплатформенной инерциальной навигации на микромеханических чувствительных элементах
Способ изготовления ротора электростатического гироскопа
Двухстепенной поплавковый гироскоп
Способ оценки динамических характеристик датчиков угловой скорости
Способ определения динамических погрешностей микромеханических инерциальных датчиков и инерциальных измерительных модулей на их основе
Стенд для выработки угловых колебаний в двух плоскостях
Установка для восполнения энергии морских буев
Волномерный буй с инерциальным измерительным модулем на основе микромеханических датчиков
Устройство для измерений мгновенных угловых перемещений качающейся платформы
Способ определения дисперсии погрешности измерения двухмерного спектра волнения инерциальным измерительным модулем волномерного буя и устройство для его реализации
Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации
Двухстепенной стенд для задания угловых колебаний
Одноосный стенд для оценки амплитудно-частотной характеристики системы коррекции магнитного компаса

