Результат интеллектуальной деятельности: Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы
Вид РИД
Изобретение
Предлагаемое изобретение относится к радиолокации и может быть использовано для создания приемника радиолокационной системы (РЛС), использующей в качестве сигнала подсвета воздушных целей зондирующий радиосигнал наземного передатчика.
Известна бистатическая РЛС [1], состоящая из передатчика и приемника. Работа РЛС заключается в излучении передатчиком зондирующего радиосигнала, измерении расстояния до цели и направления на цель. Но в этой РЛС отсутствует возможность компенсации зондирующего радиосигнала, который может поступать от передатчика, напрямую в приемник.
Для компенсации мешающих радиосигналов применяют пространственную селекцию полезных радиосигналов адаптивными антенными решетками с управляемыми «нулями» диаграммы направленности, формируемыми в направлениях на источники мешающих сигналов [2, 3].
Однако если направление от приемника на воздушную цель близко к направлению на радиопередатчик зондирующего радиосигнала, то вместе с прямым зондирующим радиосигналом будет подавлен и радиосигнал, отраженный, от воздушной цели.
Наиболее близким по технической сущности (прототипом) является устройство обнаружения и оценки радиолокационных параметров навигационного сигнала космической системы навигации, рассеянного воздушной целью [4]. В этом устройстве при приеме слабого рассеянного воздушной целью навигационного сигнала осуществляется компенсация мощного навигационного сигнала прямого распространения, играющего роль помехи. Для этого проводится запись в оперативную память входной реализации в виде смеси мощного прямого навигационного сигнала, слабого навигационного сигнала, рассеянного воздушной целью, и собственного шума приемника. Осуществляется слежение за навигационным сигналом прямого распространения с точной оценкой всех его параметров: задержки распространения, доплеровской частоты, начальной фазы, амплитуды. С использованием этих параметров формируется сигнал компенсации, который вычитается из запомненной входной реализации. Результатом вычитания будет приближенная оценка сигнала, отраженного от воздушной цели.
Основным недостатком прототипа является необходимость получения точных оценок всех параметров мешающего сигнала прямого распространения: задержки, начальной фазы и амплитуды. Для получения оценок этих параметров в приемнике должны быть предусмотрены отдельные устройства слежения и оценки, каждое из которых характеризуется ошибкой оценки параметра. При этом величина нескомпенсированного остатка будет зависеть от точности устройств слежения и оценки, и может значительно превышать полезный сигнал, отраженный от воздушной цели.
Целью изобретения является устранение вышеизложенного недостатка с помощью адаптивного компенсатора навигационного сигнала прямого распространения, использующего в приемнике информацию о его задержке и структуре.
Техническим результатом изобретения является более точная компенсация радиолокационного сигнала прямого распространения и выделение радиолокационного сигнала рассеянного воздушной целью.
Поставленная цель достигается тем, что в веденом устройстве компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной РЛС, который синхронизирован с радиопередатчиком, осуществляется генерация квадратурной копии зондирующего сигнала, которая умножается на адаптивно подстраиваемый весовой коэффициент, и компенсирует прямой радиолокационный сигнал радиопередатчика.
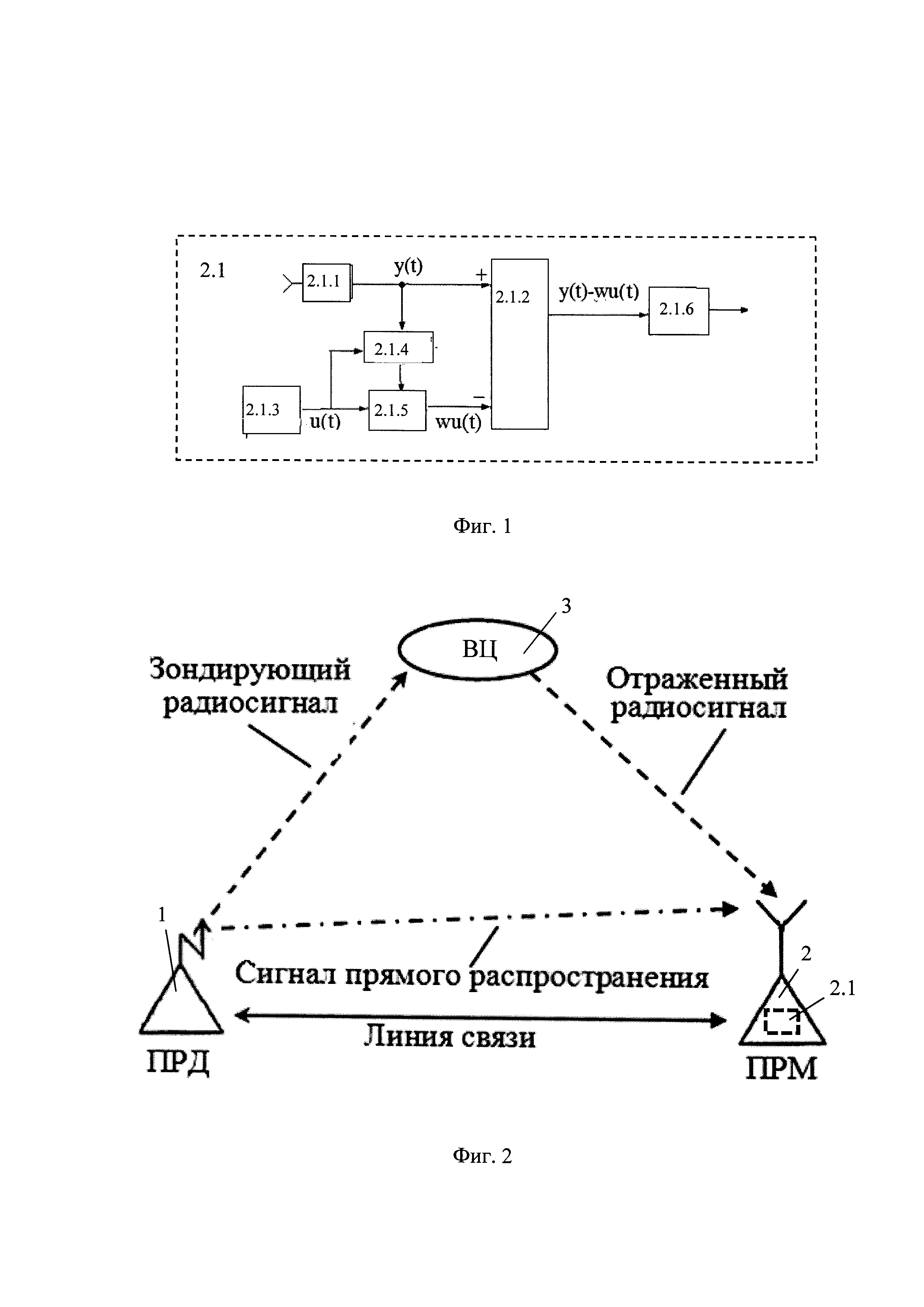
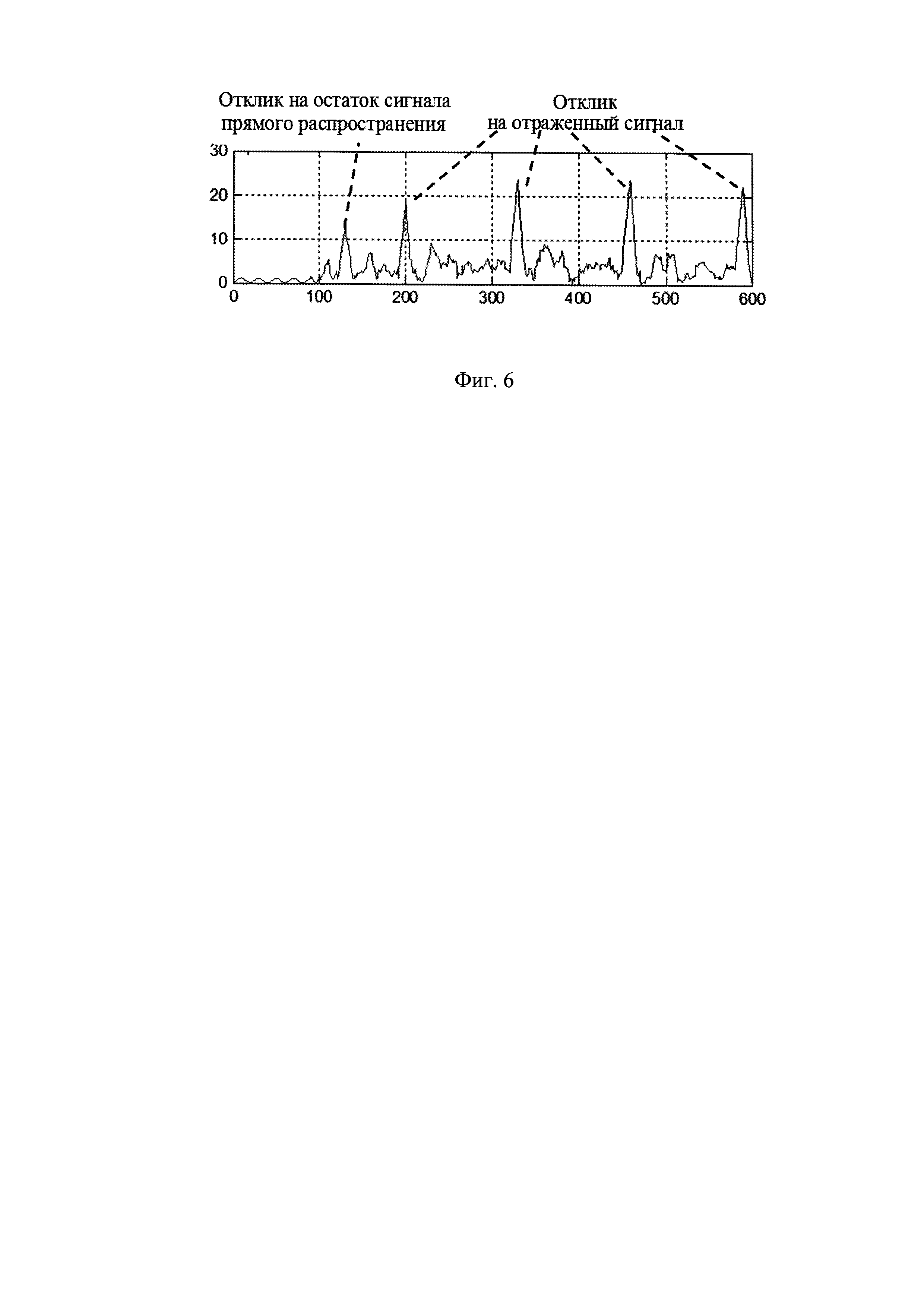
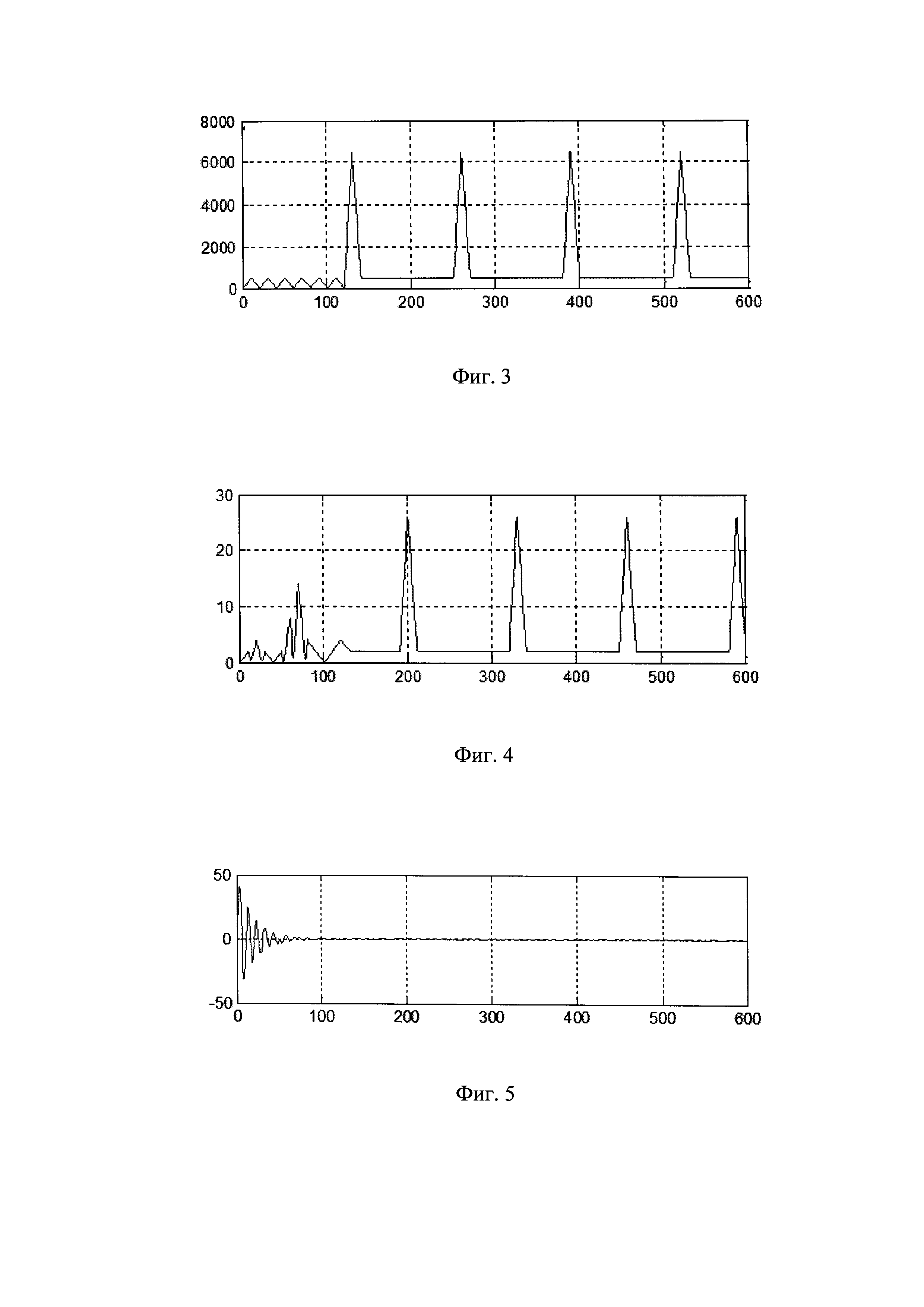
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема устройства компенсации радиолокационного сигнала прямого распространения, на фиг. 2 показана структурная схема двухпозиционной радиолокационной системы, на фиг. 3 показан отклик согласованного фильтра на радиолокационный сигнал прямого распространения в отсутствии его компенсации, на фиг. 4 показан отклик согласованного фильтра на отраженный радиолокационный сигнал в отсутствии радиолокационного сигнала прямого распространения, на фиг. 5 показан результат компенсации радиолокационного сигнала прямого распространения на выходе сумматора устройства компенсации, на фиг. 6 показан отклик остатка компенсированного радиолокационного сигнала прямого распространения и отраженного радиолокационного сигнала на выходе согласованного фильтра.
Радиолокационная система, состоит из наземного передатчика (ПРД) 1, наземного приемника (ПРМ) 2. В ПРМ 2, дополнительно введено устройство компенсации 2.1 прямого радиолокационного сигнала, состоящее из формирователя квадратурного радиолокационного сигнала 2.1.1, сумматора 2.1.2, генератора квадратурной копии зондирующего радиолокационного сигнала 2.1.3, блока оценки весового коэффициента 2.1.4, умножителя 2.1.5, согласованного фильтра 2.1.6, имеющих между собой следующие связи. Выход формирователя квадратурного радиолокационного сигнала 2.1.1 подключен к одному из входов сумматора 2.1.2 и к одному из входов блока оценки весового коэффициента 2.1.4. Генератор квадратурной копии зондирующего радиолокационного сигнала 2.1.3 подключен к другому входу блока оценки весового коэффициента 2.1.4 и к одному из входов умножителя 2.1.5. Другой вход умножителя 2.1.5 подключен к выходу блока оценки весового коэффициента 2.1.4. Выход умножителя 2.1.5 со знаком «минус» подключен к другому входу сумматора 2.1.2. Выход сумматора 2.1.2 подключен к входу согласованного фильтра 2.1.6. При этом вход формирователя квадратурного радиолокационного сигнала 2.1.1 подключен к выходу фильтра промежуточной частоты ПРМ 2 (на фиг. 1 не показано), а выход согласованного фильтра 2.1.6 подключен к устройству вторичной обработки радиолокационного сигнала ПРМ 2 (на фиг. 1 не показано).
Устройство компенсации 2.1 прямого радиолокационного сигнала ПРД 1 работает в ПРМ 2, который синхронизирован ПРД 1, следующим образом.
ПРД 1 излучает радиолокационный сигнал, который для воздушной цели (ВЦ) 3 становится зондирующим, а для ПРМ 2 помеховым (сигналом прямого распространения).
ПРМ 2 принимает отраженный радиолокационный сигнал от ВЦ 3 и радиолокационный сигнал прямого распространения от ПРД 1.
Радиолокационный сигнал, отраженный от ВЦ 3, и сигнал прямого распространения от ПРД 1 поступают в ПРМ 2 и через фильтр промежуточной частоты (на фиг. 1 не показано) поступают в формирователь квадратурного сигнала 2.1.1, в котором формируется сигнал y(t) и передается в блок оценки весового коэффициента 2.1.4 и в сумматор 2.1.2.
Генератор квадратурной копии зондирующего сигнала 2.1.3 формирует сигнал u(t), синхронизированный с сигналом прямого распространения от ПРД 1, который поступает в блок оценки весового коэффициента 2.1.4 и умножитель 2.1.5.
В блоке оценки весового коэффициента 2.1.4 весовой коэффициент оценивается следующим образом
W(t)=(1-μ)W(t-1)+μy(t)×conj(u(t)),
где t - дискретные отсчеты времени, 0<μ<1 - коэффициент, определяющий компромисс между точностью и скоростью компенсации, conj - операция комплексного сопряжения, W(0)=1, y(t) - сигнал на выходе формирователя квадратурного сигнала, u(t) - сигнал, сформированный генератором квадратурной копии зондирующего сигнала.
Полученный в блоке оценки весового коэффициента 2.1.4 весовой коэффициент W(t) поступает в умножитель 2.1.5, в который с генератора 2.1.3 поступает квадратурная копия сигнала прямого распространения u(t). Умножитель 2.1.5 формирует сигнал W(t)u(t), который с обратным знаком поступает в сумматор 2.1.2. Одновременно в сумматор 2.1.2 поступает сигнал y(t) с формирователя квадратурного сигнала 2.1.1. В сумматоре 2.1.2 формируется разностный сигнал y(t)-W(t)u(t), который подается в согласованный фильтр 2.1.6. В согласованном фильтре 2.1.6 происходит формирование откликов на радиолокационный сигнал прямого распространения и на отраженный радиолокационный сигнал, которые передаются в устройство вторичной обработки радиолокационного сигнала ПРМ 2 (на фиг. 1 не показано).
Для примера рассмотрим результаты компенсации сигнала прямого распространения предлагаемым компенсатором. В качестве зондирующего сигнала используем фазоманипулированный сигнал с 13-ти разрядным кодом Баркера.
Число отсчетов на элементе кода составляет 10. Число периодов высокочастотного колебания на элементе кода равно 1. Амплитуда сигнала прямого распространения на входе компенсатора равна 50. Амплитуда отраженного сигнала равна 0,2, что в 250 раз меньше амплитуды сигнала прямого распространения. Отраженный сигнал задержан относительно сигнала прямого распространения на 20 отсчетов. Среднеквадратическое значение внутреннего шума равно 0,2. Амплитуда копии сигнала на выходе генератора копии зондирующего сигнала равна 1, а фаза сигнала сдвинута на 90°, μ=0.05.
На фиг. 3 приведен отклик согласованного фильтра 2.1.6 на сигнал прямого распространения в отсутствии его компенсации.
На фиг. 4 приведен отклик согласованного фильтра 2.1.6 на отраженный от цели сигнал в отсутствии сигнала прямого распространения.
Из сравнения рисунков фиг. 3 и фиг. 4 видно, что пиковые значения отраженного от ВЦ 3 радиолокационного сигнала отстают от пиковых значений сигнала прямого распространения на 70 отсчетов.
На фиг. 5 приведены результаты компенсации радиолокационного сигнала прямого распространения от ПРД 1 на выходе сумматора 2.1.2 устройства компенсации 2.1. Из этого рисунка видно, что уровень сигнала прямого распространения в процессе компенсации значительно уменьшается примерно через 80 отсчетов.
На фиг. 6 приведен отклик согласованного фильтра 2.1.6 на принятые сигналы после компенсации сигнала прямого распространения. На этом рисунке просматривается многократно уменьшенный отклик на остаток сигнала прямого распространения и отчетливо просматриваемый отклик на сигнал, отраженный от ВЦ 3. При этом задержка первого пика отраженного от ВЦ 3 сигнала относительно сигнала прямого распространения от ПРД 1 составляет около 70 отсчетов.
Таким образом, предложенное устройство компенсации прямого радиолокационного сигнала передатчика в приемнике двухпозиционной радиолокационной системы обеспечивает выделение слабого радиолокационного сигнала, рассеянного воздушной целью, на фоне мощного радиолокационного сигнала прямого распространения и позволяет оценить время его задержки относительно радиолокационного сигнала, излучаемого передатчиком.
Источники информации
1. Ковалев Ф.Н. Кондратьев В.В. Особенности угломерно-дальномерного метода определения местоположения цели в просветных бистатических радиолокаторах. Журнал Радиоэлектроники: электронный журнал. №4, 2014.
2. Уидроу Б., Стирнз С. Адаптивная обработка сигналов: Пер. с англ. М.: Радио и связь. 1989. 440 с.
3. Гриффите Л. Простой адаптивный алгоритм для обработки сигналов антенных решеток в реальном времени // ТИИЭР. 1969. Т. 57. №10. С. 6-14.
4. Патент 2591052 РФ, МПК G01S 5/06, G01S 13/95. Способ обнаружения и оценки радионавигационных параметров сигнала космической системы навигации, рассеянного воздушной целью, и устройство для его реализации / А.В. Кирюшкин и др. (РФ); Российская Федерация, от имени которой выступает министерство обороны Российской Федерации (РФ), Федеральное государственное казенное военное образовательное учреждение высшего профессионального образования «Военный учебно-научный центр Военно-воздушных сил «Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина» (г. Воронеж, Министерство обороны Российской Федерации (РФ). №2014101847/07; Заявлено 21.01.2014; Опубл. 10.07.2016, Бюл. №17. - 12 с.: 1 ил.
Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы (РЛС), дополнительно введенное в наземный приемник (ПРМ), синхронизированный с наземным передатчиком (ПРД), состоящее из формирователя квадратурного радиолокационного сигнала, сумматора, генератора квадратурной копии зондирующего радиолокационного сигнала, блока оценки весового коэффициента, умножителя, согласованного фильтра, имеющих между собой следующие связи: выход формирователя квадратурного радиолокационного сигнала подключен к одному из входов сумматора и к одному из входов блока оценки весового коэффициента, генератор квадратурной копии зондирующего радиолокационного сигнала подключен к другому входу блока оценки весового коэффициента и к одному из входов умножителя, другой вход умножителя, подключен к выходу блока оценки весового коэффициента, выход умножителя со знаком «минус» подключен к другому входу сумматора, выход сумматора подключен к входу согласованного фильтра, при этом вход формирователя квадратурного радиолокационного сигнала подключен к выходу фильтра промежуточной частоты ПРМ, а выход согласованного фильтра подключен к устройству вторичной обработки радиолокационного сигнала ПРМ, обеспечивающему в формирователе квадратурного сигнала формирование сигнала y(t) из поступивших с фильтра промежуточной частоты ПРМ отраженного радиолокационного сигнала и прямого радиосигнала, в генераторе квадратурной копии зондирующего сигнала формирование сигнала u(t), синхронизированного с сигналом прямого распространения от ПРД, в блоке оценки весового коэффициента весовой коэффициент оценивается рекурсивным образом W(t)=(1-μ)W(t-1)+μy(t)xconj(u(t)), где t - дискретные отсчеты времени, 0<μ<1 - коэффициент, определяющий компромисс между точностью и скоростью компенсации, conj - операция комплексного сопряжения, W(0)=1, y(t) - сигнал на выходе формирователя квадратурного сигнала, u(t) - сигнал, сформированный генератором квадратурной копии зондирующего сигнала, в умножителе формируется сигнал W(t)u(t), в сумматоре формируется разностный сигнал y(t)-W(t)u(t), в согласованном фильтре формируется отклик на радиолокационный сигнал прямого распространения и на отраженный радиолокационный сигнал.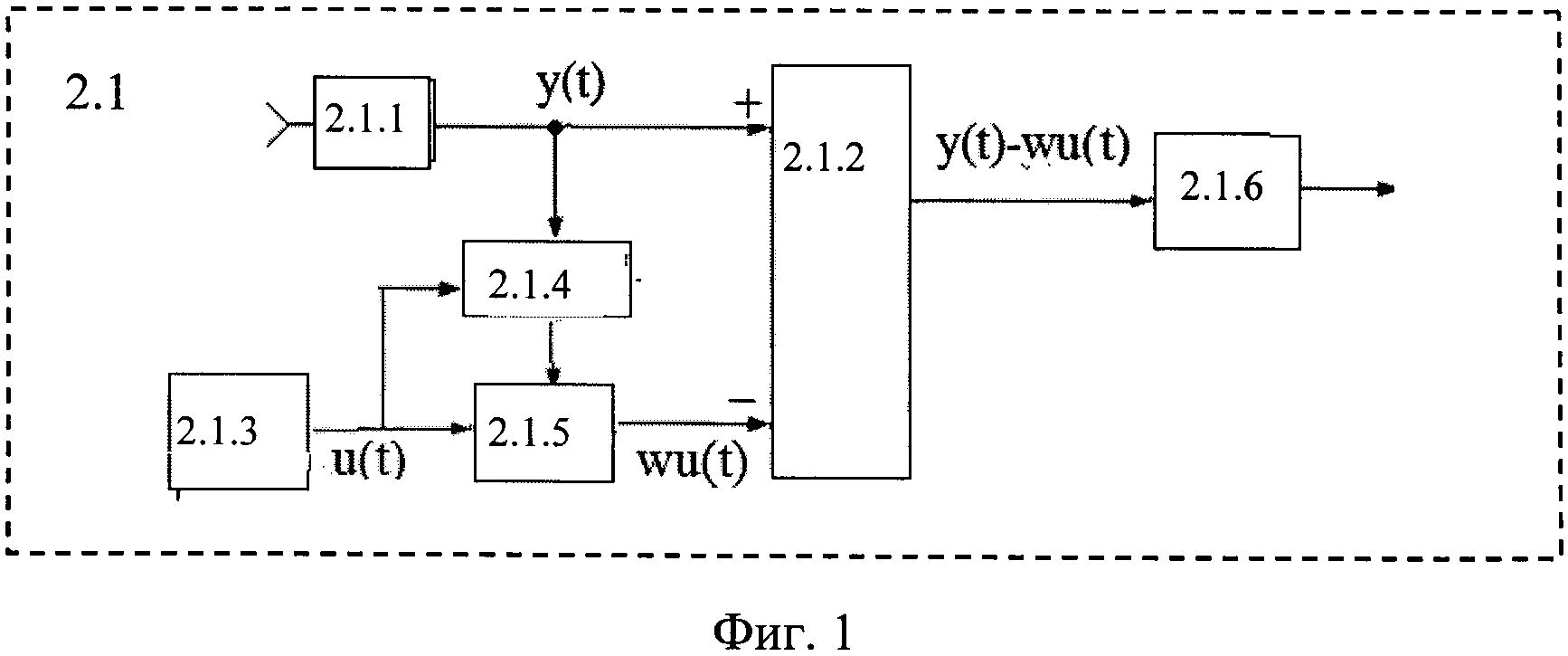
Симметричная вибраторная антенна с симметрирующим устройством
Радиопередающее устройство с автоматической регулировкой параметров спектра радиосигнала
Адаптивная антенная система для панорамного радиоприемника
Устройство компенсации преднамеренных радиопомех нап гнсс
Активная передающая антенная система радиоподавления низкоорбитальных спутников-ретрансляторов системы связи
Способ улучшения разрешающей способности корреляционных методов пеленгации
Способ расчета трехмерных координат летательного аппарата дальномерным методом при расположении станций с известными координатами на равнинной местности
Способ отождествления позиционных измерений и определения местоположения воздушных целей в пространственно-распределенной радионавигационной системе в условиях многоцелевой обстановки
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки
Способ первичного отождествления позиционных измерений и определения местоположения целей в наземной пространственно распределенной радионавигационной системе в условиях многоцелевой обстановки
Способ определения координат воздушных целей в многопозиционной системе наблюдения "навигационные спутники - воздушные цели - приемник"
Станция радиоподавления приемной аппаратуры спутников-ретрансляторов низкоорбитальной системы спутниковой связи

