Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОЙ КАЛИБРОВКИ ДАТЧИКА УГЛА ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ПРИВОДОМ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к области измерения, производимого приемником глобальной навигационной спутниковой системы (ГНСС), в частности к способу автоматической калибровки датчика угла для автоматической системы управления автоматическим приводом сельскохозяйственных машин.
Уровень техники
Сельскохозяйственная машина (в частности, трактор, который будет в дальнейшем использоваться для обозначения сельскохозяйственной машины) является движущим агрегатом для различных механизированных операций, который представляет собой наиболее важную силовую машину в сельскохозяйственных производственных операциях. Сельскохозяйственная машина(-ы) может выполнять большинство работ на полях с навесным, присоединенным или буксируемым сельскохозяйственным оборудованием. Сельскохозяйственная машина(-ы) также может выполнять буксировку трейлера для выполнения транспортных операций. В связи с непрерывным повышением производительности труда в сельском хозяйстве, неизбежной тенденцией является развитие сельскохозяйственных тракторов в более широком масштабе. Эта тенденция особенно заметна в Северной Америке и Западной Европе. В последние годы в северо-восточном Китае и китайской провинции Синьцзян наблюдается устойчивый скачок развития. В результате, в процессе сельскохозяйственного производства пользователи все в большей степени зависят от тракторов большой мощности, поэтому крайне важно повысить степень использования тракторов при выполнении работ. Однако, когда механические узлы трактора работают в относительно суровых природных условиях, условия эксплуатации являются сложными и изменчивыми, качество работы операторов варьируется, и это приводит к низкой точности работы и низкому коэффициенту использования земли. Кроме того, не могут гарантироваться эффективность использования топлива и производительность трактора в процессе эксплуатации. Поэтому управление сельскохозяйственными машинами, особенно крупными сельскохозяйственными машинами, стало ключевой проблемой, срочно нуждающейся в решении для точного земледелия. Наиболее эффективным решением данной проблемы является технология автоматического привода ГНСС навигации.
Система управления автоматическим приводом ГНСС навигации в основном состоит из двух главных компонентов: интегрированного алгоритма навигации и алгоритма управления. Интегрированный алгоритм навигации предоставляет алгоритму управления точные данные о положении и высоте. Значение отклонения рассчитывается в реальном времени алгоритмом задания маршрута на основе местоположения и получаемой информации. Затем значение отклонения преобразуется алгоритмом управления в управляющую величину, чтобы управлять движением трактора в соответствии с заданным маршрутом. В данных алгоритмах должна быть создана кинематическая модель транспортного средства, и угол поворота переднего колеса в кинематической модели является одним из наиболее важных параметров модели. Из-за ошибки установки и ошибки изготовления, в модели будут возникать ошибки расчетов. В результате, алгоритм управления становится некорректным. Что еще хуже, управление может быть противоречивым, вследствие чего задача автоматического привода не может быть реализована.
Раскрытие сущности изобретения
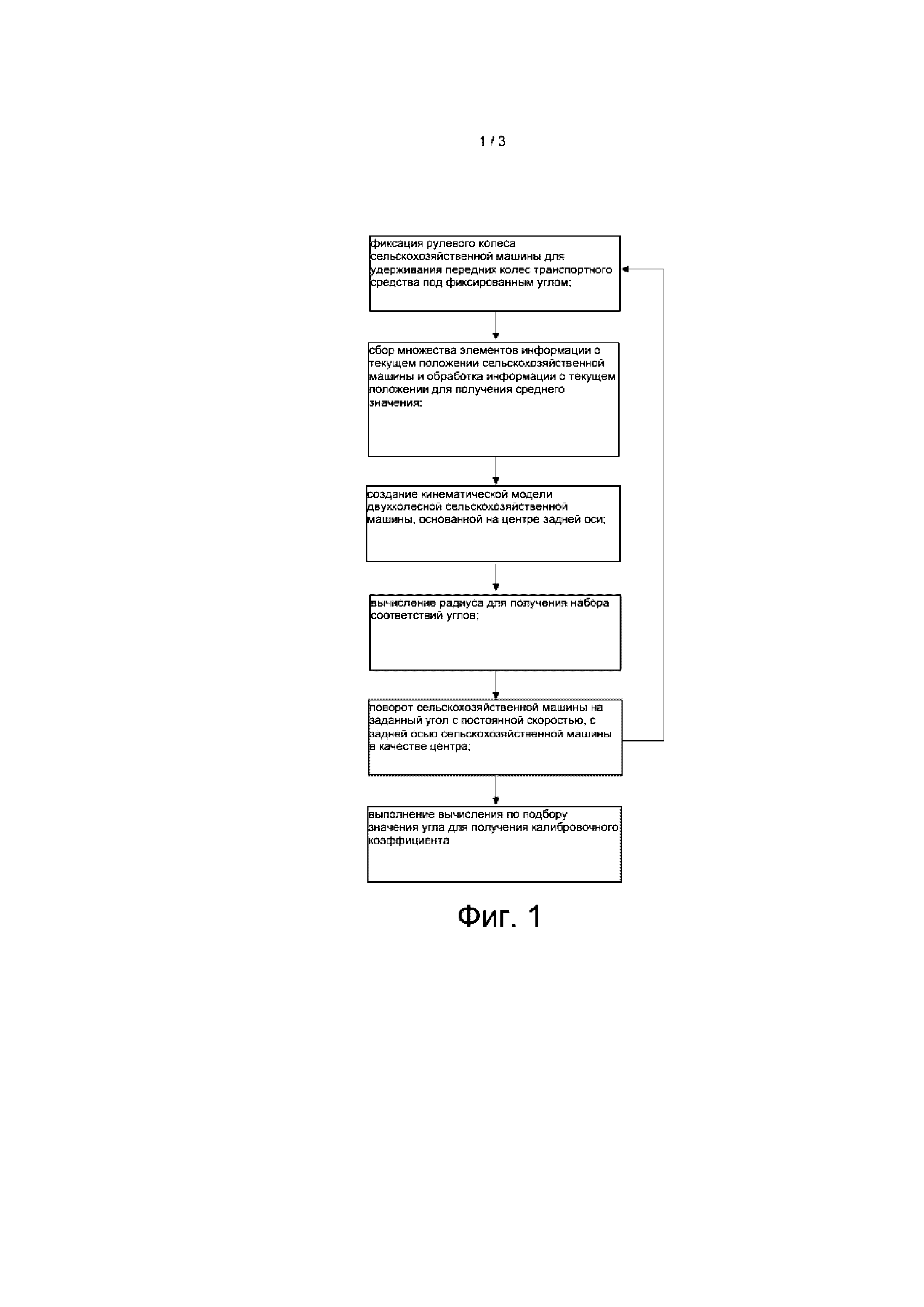
Настоящее изобретение предлагает способ автоматической калибровки датчика угла для системы управления автоматическим приводом сельскохозяйственной машины, которая включает следующие этапы:
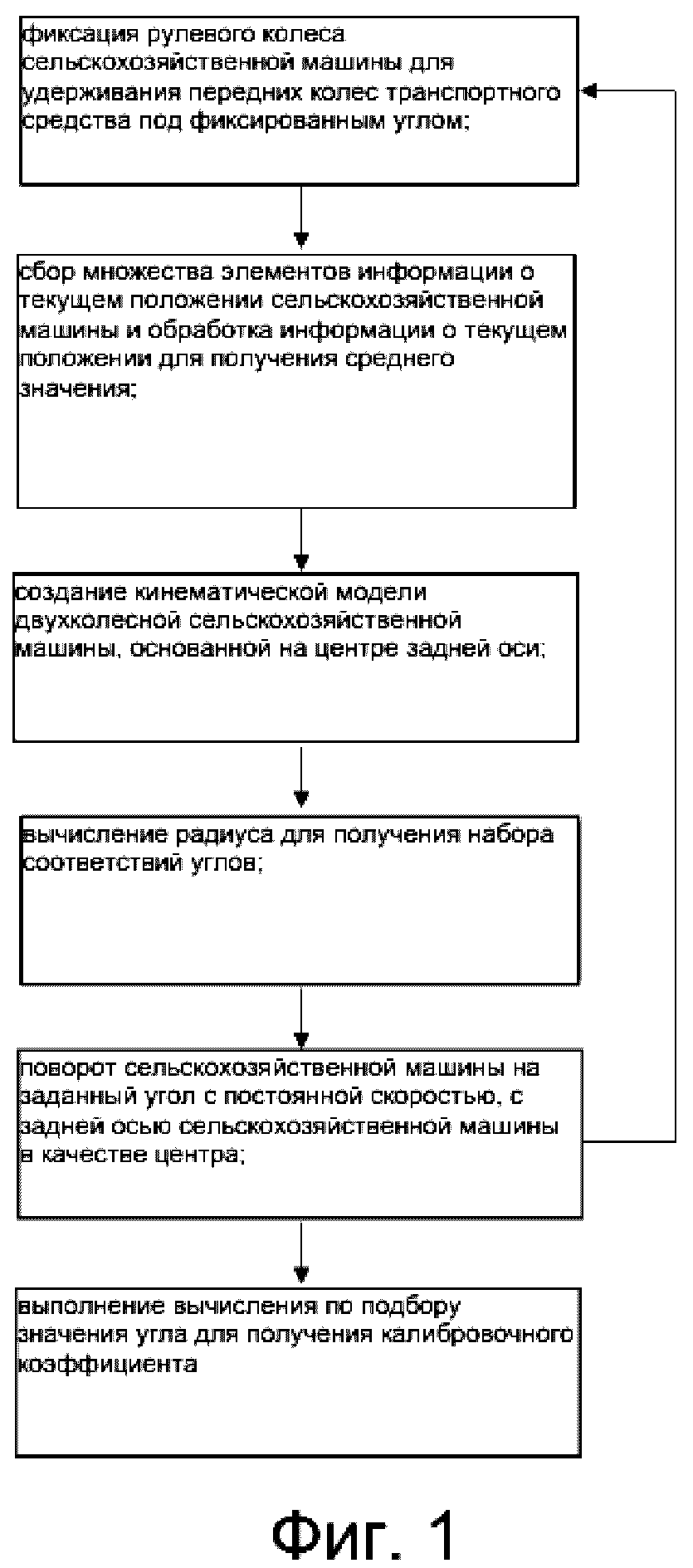
Этап S1: фиксация рулевого колеса сельскохозяйственной машины для удерживания передних колес транспортного средства под фиксированным углом;
Этап S2: сбор множества элементов информации о текущем положении сельскохозяйственной машины и обработка множества элементов информации о текущем положении для получения среднего значения;
Этап S3: создание кинематической модели двухколесной сельскохозяйственной машины, основанной на центре задней оси;
Этап S4: вычисление радиуса для получения набора соответствий углов;
Этап S5: поворот сельскохозяйственной машины на заданный угол с постоянной скоростью, с задней осью сельскохозяйственной машины в качестве центра, и выполнение этапов S1-S4;
Этап S6: выполнение вычисления по подбору значения угла для получения калибровочного коэффициента, после выполнения этапа S5 несколько раз.
В вышеупомянутом способе автоматической калибровки датчика угла для системы управления автоматическим приводом сельскохозяйственной машины, на этапе S6 данные о поворотах транспортного средства влево и вправо соответственно собирают не менее 5-ти раз.
В вышеупомянутом способе автоматической калибровки датчика угла для системы управления автоматическим приводом сельскохозяйственной машины этап S3, в частности, включает:
предположение того, что радиус окружности передних и задних колес равен R, и получение следующего уравнения 1:
где
θ - угол поворота трактора,
α - угол поворота переднего колеса трактора и
L - колесная база трактора.
В уравнении 1, β - соответствующий центральный угол колесной базы L, а α - соответствующий вписанный угол колесной базы L. Уравнение 2, приведенное ниже, получено из уравнения 1:
В вышеупомянутом способе автоматической калибровки датчика угла системы управления автоматическим приводом сельскохозяйственной машины этапы расчета радиуса R включают:




 Уравнение 3
Уравнение 3



 0.5
0.5
Где a, b, c, d, e и f - промежуточные вычисляемые переменные;
х и у - координаты центра окружности;
 ,
,  - координаты трех точек, записанные в процессе вождения сельскохозяйственной машины.
- координаты трех точек, записанные в процессе вождения сельскохозяйственной машины.
В вышеупомянутом способе автоматической калибровки датчика угла системы управления автоматическим приводом сельскохозяйственной машины этапы расчета настройки значения угла включают:
предположение того, что значение датчика угла равно  , соответствующее значение датчика угла, рассчитанное с учетом выборочных точек положения в уравнении 3, равно
, соответствующее значение датчика угла, рассчитанное с учетом выборочных точек положения в уравнении 3, равно  , n представляет собой n-ое соответствие, а калибровочные квадратичные коэффициенты датчика угла равны
, n представляет собой n-ое соответствие, а калибровочные квадратичные коэффициенты датчика угла равны  ,
,  , и
, и  .
.
 =
= Уравнение 4
Уравнение 4
,  - результаты калибровки.
- результаты калибровки.
Настоящее изобретение имеет следующие преимущества.
1. Благодаря применению в настоящей заявке технологии, объединяющей кинематику транспортного средства и высокоточную ГНСС, может быть реализована высокоточная калибровка датчика угла.
2. Настоящая заявка может реализовывать автоматическую калибровку без внешнего вспомогательного устройства и сопутствующего ввода экспериментальных параметров.
3. Настоящая заявка подходит, в частности, для высокоточных систем управления автоматическим приводом сельскохозяйственных машин.
Краткое описание чертежей
Настоящее изобретение, его характеристики, признаки и преимущества станут более понятными при прочтении подробного описания неограничивающего варианта осуществления со ссылкой на чертежи, представленные ниже. На чертежах одинаковые ссылочные позиции обозначают одну и ту же часть. Чертежи выполнены в соответствии с конкретными пропорциями, при этом задача чертежей состоит в том, чтобы проиллюстрировать сущность настоящего изобретения.
На фиг. 1 представлена блок-схема, показывающая способ автоматической калибровки датчика угла системы управления автоматическим приводом сельскохозяйственной машины согласно настоящему изобретению;
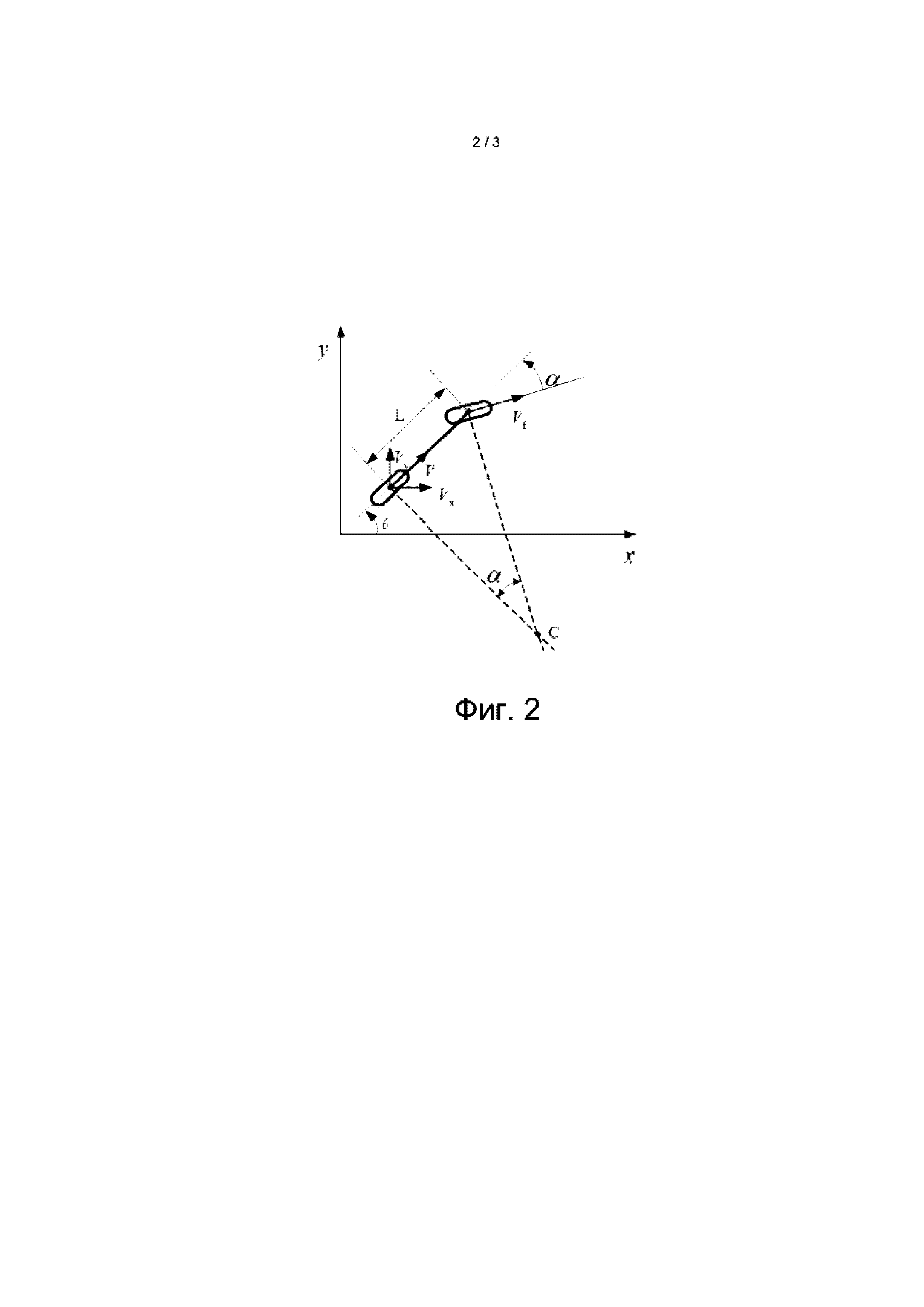
На фиг. 2 представлена принципиальная схема, показывающая кинематическую модель двухколесного трактора, основанную на центре задней оси;
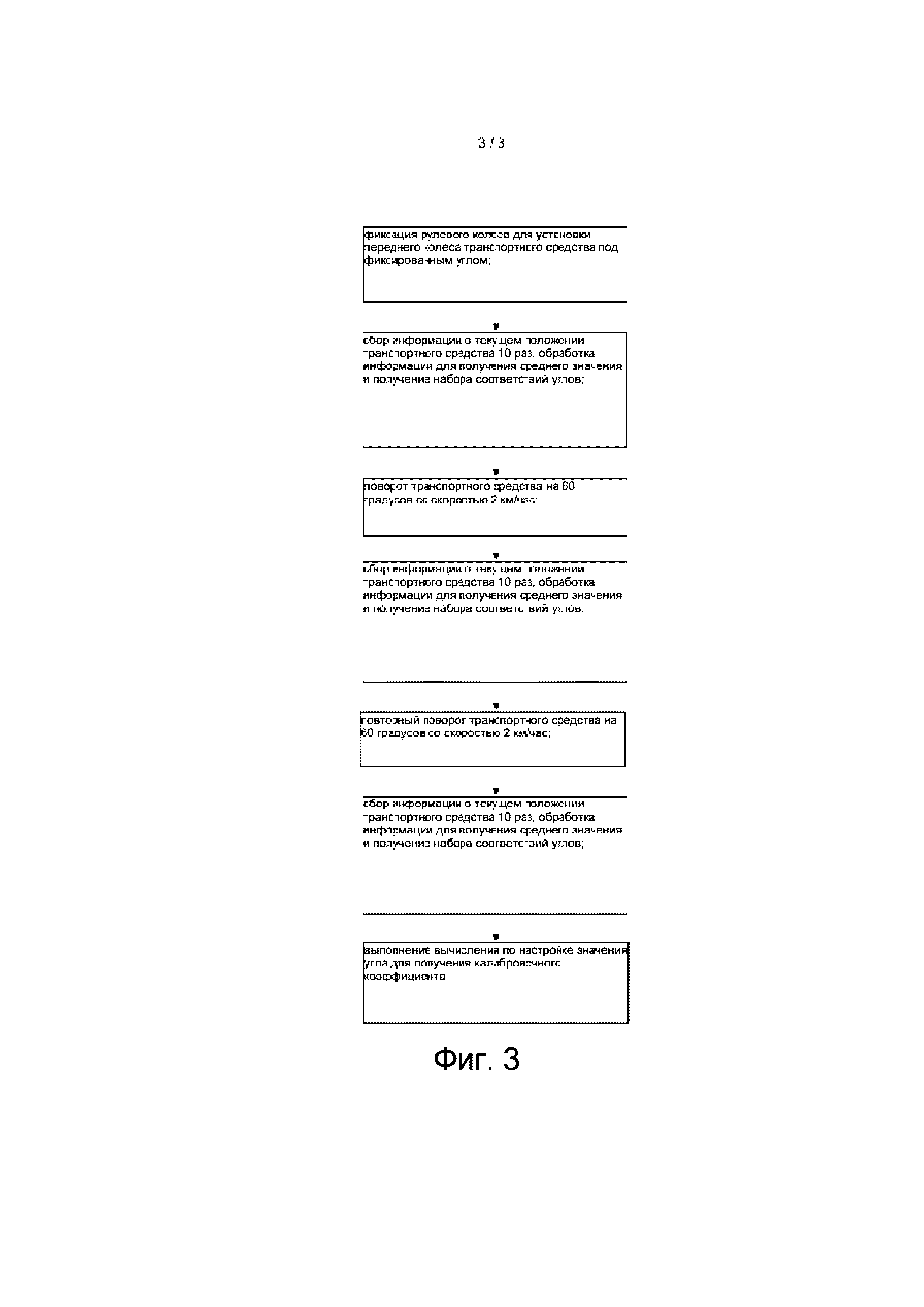
На фиг. 3 представлена блок-схема последовательности операций настоящего изобретения согласно одному варианту осуществления.
Осуществление изобретения
В последующих описаниях приведены многочисленные конкретные детали для полного понимания настоящего изобретения. Однако для специалистов в данной области техники очевидно, что настоящее изобретение может быть реализовано без одной или более из этих деталей. В других примерах некоторые технические признаки, известные в данной области техники, не описаны, во избежание путаницы с настоящим изобретением.
Для полного понимания настоящего изобретения в последующих описаниях будут предоставлены подробные этапы и подробные структуры, чтобы четко проиллюстрировать техническое решение настоящего изобретения. Предпочтительный вариант осуществления настоящего изобретения подробно описан ниже. Однако, помимо этих подробных описаний, настоящее изобретение может иметь другие варианты реализации.
Настоящее изобретение обеспечивает способ автоматической калибровки датчика угла для системы управления автоматическим приводом сельскохозяйственной машины, который включает следующие этапы.
Этап S1: фиксация рулевого колеса сельскохозяйственной машины для удерживания передних колес транспортного средства под фиксированным углом;
Этап S2: сбор множества элементов информации о текущем положении сельскохозяйственной машины и обработка множества элементов информации о текущем положении для получения среднего значения;
Этап S3: создание кинематической модели двухколесной сельскохозяйственной машины, основанной на центре задней оси;
Этап S4: вычисление радиуса для получения набора соответствий углов;
Этап S5: поворот сельскохозяйственной машины на заданный угол с постоянной скоростью, с задней осью сельскохозяйственной машины в качестве центра, и выполнение этапов S1-S4;
Этап S6: выполнение вычисления по настройке значения угла для получения калибровочного коэффициента, после выполнения этапа S5 несколько раз.
В необязательном варианте осуществления настоящего изобретения данные о поворотах транспортного средства влево и вправо соответственно собираются не менее 5-ти раз.
На фиг. 1 представлена принципиальная схема, показывающая кинематическую модель двухколесного трактора, основанную на центре задней оси. На данной фигуре, θ - угол поворота трактора, α - угол поворота переднего колеса трактора, V - скорость заднего колеса трактора, Vf - скорость переднего колеса трактора, L - колесная база (или длина хорды) трактора, точка C лежит на перпендикуляре к L и расположена на окружности передних и задних колес. То есть, α – это вписанный угол, соответствующий длине L хорды.
Предполагая, что радиус окружностей передних и задних колес равен R, то
 Уравнение 1
Уравнение 1
В уравнении 1,  - центральный угол, соответствующий длине L хорды, а α - вписанный угол, соответствующий длине L хорды. Кроме того, α равен значению датчика угла переднего колеса. Уравнение 2 получено из уравнения 1, то есть, угол поворота переднего колеса и радиус имеют нелинейную зависимость. Если можно узнать значение радиуса, значение угла переднего колеса может быть получено путем обратного вычисления:
- центральный угол, соответствующий длине L хорды, а α - вписанный угол, соответствующий длине L хорды. Кроме того, α равен значению датчика угла переднего колеса. Уравнение 2 получено из уравнения 1, то есть, угол поворота переднего колеса и радиус имеют нелинейную зависимость. Если можно узнать значение радиуса, значение угла переднего колеса может быть получено путем обратного вычисления:
 Уравнение 2.
Уравнение 2.
Для высокоточной ГНСС, за счет использования технологии кинематики в реальном времени RTK (КРВ) точность определения положения может быть повышена до диапазона в 1 см. В системе автоматического привода сельскохозяйственной машины датчик угла является одним из компонентов всей системы, а высокоточная плата ГНСС является другим компонентом. Поскольку настоящий патент сконцентрирован на изучении калибровки датчика угла, он не включает технологию КРВ. Настоящая заявка в вариантах применения непосредственно использует информацию о положении, выводимую высокоточной платой.
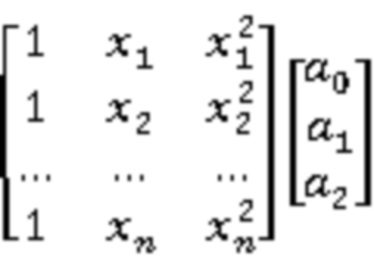
Уравнение 3 содержит формулы расчета алгебраического уравнения окружности, которая определена тремя точками. Координаты трех точек, записанные в процессе вождения трактора, обозначены как P1 ( ), P2 (
), P2 ( ) и P3 (
) и P3 ( ). Этапы вычисления радиуса R включают:
). Этапы вычисления радиуса R включают:
Уравнение 3
0.5
где
a, b, c, d, e и f – промежуточные вычисляемые переменные,
x, y - координаты центра окружности;
,  ,
,  ,
,  - координаты трех точек, записанные в процессе вождения сельскохозяйственной машины.
- координаты трех точек, записанные в процессе вождения сельскохозяйственной машины.
Согласно уравнению 2 и уравнению 3 может быть получено значение радиуса, соответствующее фиксированному углу поворота переднего колеса. Теоретически, соответствующая линия может быть получена по двум значениям угла и значению радиуса. Однако из-за воздействия различных факторов окружающей среды, изменение значения угла может быть нелинейным. Чтобы повысить точность калибровки, в настоящем патенте используется способ наименьших квадратов квадратичной кривой для квадратичной настройки множества значений угла и значений радиуса.
Предполагая, что значение датчика угла равно  , соответствующее значение датчика угла, которое вычисляется с учетом выборочных точек положения в уравнении 3, равно , n представляет собой n-ое соответствие (то есть поворот сельскохозяйственной машины n-ый раз), и квадратичные коэффициенты калибровки датчика угла равны , , и .
, соответствующее значение датчика угла, которое вычисляется с учетом выборочных точек положения в уравнении 3, равно , n представляет собой n-ое соответствие (то есть поворот сельскохозяйственной машины n-ый раз), и квадратичные коэффициенты калибровки датчика угла равны , , и .
= Уравнение 4
, являются результатами калибровки.
Настоящее изобретение имеет следующие преимущества.
1. Благодаря применению в настоящей заявке технологии, объединяющей кинематику транспортного средства и высокоточную ГНСС, может быть реализована высокоточная калибровка датчика угла.
2. Настоящая заявка может реализовывать автоматическую калибровку без внешнего вспомогательного устройства и сопутствующего ввода экспериментальных параметров.
3. Настоящая заявка подходит, в частности, для систем управления автоматическим приводом для точного земледелия.
Предпочтительный вариант осуществления настоящего изобретения был описан выше. Следует понимать, что настоящее изобретение не ограничено конкретными вариантами осуществления, описанными выше. Устройства и структуры, которые не описаны подробно в данном документе, следует понимать как реализуемые известным в данной области техники образом. Различные возможные изменения и модификации или эквивалентные варианты осуществления, полученные с помощью эквивалентных замен, могут быть получены любым специалистом в данной области техники из технического решения настоящего изобретения в соответствии со способом и техническими характеристиками, изложенными выше, без отклонения от технического решения настоящего изобретения, что не оказывает никакого влияния на сущность настоящего изобретения. Следовательно, любая простая модификация, эквивалентная замена и модификация, выполненная на основе вышеупомянутого варианта осуществления в соответствии с технической сущностью настоящего изобретения без отступления от содержания технического решения настоящего изобретения, все же должны рассматриваться как входящие в объем технического решения настоящего изобретения.




















Способ обновления углового положения сельскохозяйственной машины, основанный на девятиосевом датчике на основе мэмс
Система управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети cors
Способ проверки точности измерения компенсации наклона при rtk
Способ автоматического переключения режима приема дифференциальных данных для экзамена по вождению и обучения вождению с использованием мобильной станции
Способ измерения наклона измерительного приемника rtk
Способ начального выравнивания устройства инерциальной навигации
Система управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети cors
Способ автоматического переключения режима приема дифференциальных данных для экзамена по вождению и обучения вождению с использованием мобильной станции
Способ измерения наклона измерительного приемника rtk
Загуститель на основе катионного полимера, способ его получения и термостойкая жидкость для гидроразрыва пласта, получаемая с его использованием

