Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ДИФФЕРЕНЦИАЛЬНЫМ ПОЗИЦИОНИРОВАНИЕМ НА ОСНОВЕ СЕТИ CORS
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к области измерения приемником ГНСС (глобальной навигационной спутниковой системы), в частности к системе управления полетом беспилотных летательных аппарата с дифференциальным позиционированием на основе сети постоянно действующих референцных станций (CORS).
Уровень техники
С развитием информационных технологий в область бытовой электроники из военной области вошли беспилотные летательные аппараты. В особенности в последние годы на рынке беспилотных летательных аппаратов с несущим винтом наблюдается стремительный рост. Кроме того, существует растущий спрос на беспилотные летательные аппараты в таких областях как геодезия и картография, аэрофотосъемка и т. д. По сравнению с игрушечными беспилотными летательными аппаратами с ручным управлением, требования к автоматизации и точности полета беспилотных летательных аппаратов на потребительском рынке или для профессиональной топографической съемки и картографии возрастают. В результате точный расчет данных о местоположении имеет большое значение для системы управления полетом.
В настоящее время при позиционировании беспилотных летательных аппаратов обычно используется позиционирование в одной точке при помощи GPS, и точность такого позиционирования составляет порядка одного метра. Точность позиционирования до метра далеко не удовлетворяет требованиям точности позиционирования порядка сантиметров при профессиональной топографической съемке и картографировании. Использование системы дифференциального управления полетом RTK (кинематической съемки в реальном времени) в настоящее время, несомненно, стало лучшим методом высокоточного позиционирования. Метод дифференциального позиционирования RTK, который используется большинством доступных на рынке систем дифференциального управления полетом, применяющих RTK, использует автономную базовую станцию и передает дифференциальные данные при помощи радиостанции. Такой метод требует поддержки высокоточной базовой станции RTK, находящейся на земле, и его недостатки обусловлены с низкой точностью определения координат на больших расстояниях и ограниченным расстоянием действия радиостанции(-й). Благодаря постоянному совершенствованию базовых станций в Китае и увеличению зоны покрытия сети CORS становится возможным, чтобы беспилотные летательные аппараты принимали дифференциальные данные сети CORS, тем самым получая высокоточную информацию о местоположении через мобильную сеть 3G (или 2G/4G).
Раскрытие сущности изобретения
Настоящее изобретение обеспечивает систему управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети CORS, которая включает в себя:
блок датчиков МЭМС (микроэлектромеханической системы) для сбора данных угловой скорости, линейной скорости, давления воздуха и магнитного поля;
блок позиционирования ГНСС для получения данных ГНСС о местоположении;
блок сетевой связи для получения дифференциальных данных CORS;
блок управления пространственным положением/навигацией для управления пространственным положением и навигацией беспилотного летательного аппарата;
основной блок управления, который содержит первый счетно-решающий модуль, второй счетно-решающий модуль и третий счетно-решающий модуль; причем
первый счетно-решающий модуль соединен с блоком датчиков МЭМС и используется для расчета пространственного положения, направления и высоты в соответствии с принимаемыми данными угловой скорости, линейной скорости, давления воздуха и магнитного поля;
второй счетно-решающий модуль соединен с блоком позиционирования ГНСС и блоком сетевой связи и используется для расчета местоположения методом RTK (кинематической съемки в реальном времени) в соответствии с принимаемыми данными о местоположении и дифференциальными данными CORS;
третий счетно-решающий модуль соединен с первым счетно-решающим и вторым счетно-решающим модулем и используется для вывода команды управления пространственным положением/навигацией в блок управления пространственным положением/навигацией на основе расчетных данных от первого и второго счетно-решающих модулей.
В соответствии с вышеупомянутой системой управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети CORS, блок датчиков МЭМС содержит акселерометр, гироскоп, электронный компас и барометр.
В соответствии с вышеупомянутой системой управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети CORS блок сетевой связи представляет собой блок связи 2G, 3G или 4G.
В соответствии с вышеупомянутой системой управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети CORS, система управления полетом беспилотного летательного аппарата дополнительно содержит блок беспроводного дистанционного управления, соединенный с основным блоком управления. Блок беспроводного дистанционного управления используетcя для приема инструкции дистанционного управления, отправляемой внешним удаленным контроллером, и передачи указанной инструкции дистанционного управления на основной блок управления. Основной блок управления преобразует инструкцию дистанционного управления и отправляет преобразованную инструкцию дистанционного управления в блок управления пространственным положением/навигацией.
В соответствии с вышеупомянутой системой управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети CORS, система управления полетом беспилотного летательного аппарата дополнительно содержит расширяемый терминал ввода-вывода. Расширяемый терминал ввода-вывода соединен с модулем расширения функций основного блока управления.
Внешнее расширительное устройство соединено с системой управления полетом беспилотного летательного аппарата через расширяемый терминал ввода-вывода.
В соответствии с вышеупомянутой системой управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети CORS, система управления полетом беспилотного летательного аппарата дополнительно содержит модуль мониторинга. Модуль мониторинга соединен с основным блоком управления.
Модуль мониторинга снабжен камерой.
В настоящем изобретении мобильная сеть 3G используется для получения дифференциальных данных от базовой станции CORS и реализации дифференциального позиционирования RTK системы управления полетом, поэтому высокие требования потребительского рынка и профессиональной топографической съемки и картографии, касающиеся точности позиционирования беспилотных летательных аппаратов с точностью порядка сантиметров, могут быть удовлетворены. По сравнению с методом дифференциального позиционирования RTK, в котором используется автономная базовая станция и дифференциальные данные передаются через радиостанцию, использование сети CORS для получения дифференциальных данных является более быстрым и эффективным. Кроме того, недостатки, обусловленные низкой точностью позиционирования на больших расстояниях и ограниченным расстоянием действия радиостанции(й), могут быть устранены, и это в большей степени соответствует тенденции развития RTK дифференциальных данных в будущем.
Краткое описание чертежа
Настоящее изобретение, его характеристики, внешний вид и преимущества станут более понятными после прочтения подробного описания неограничивающих вариантов осуществления со ссылкой на прилагаемый ниже чертеж. На чертеже идентичные ссылочные позиции обозначают одну и ту же часть. Чертеж выполнен не в соответствии с конкретными пропорциями и основной акцент в чертеже состоит в том, чтобы проиллюстрировать сущность настоящего изобретения.
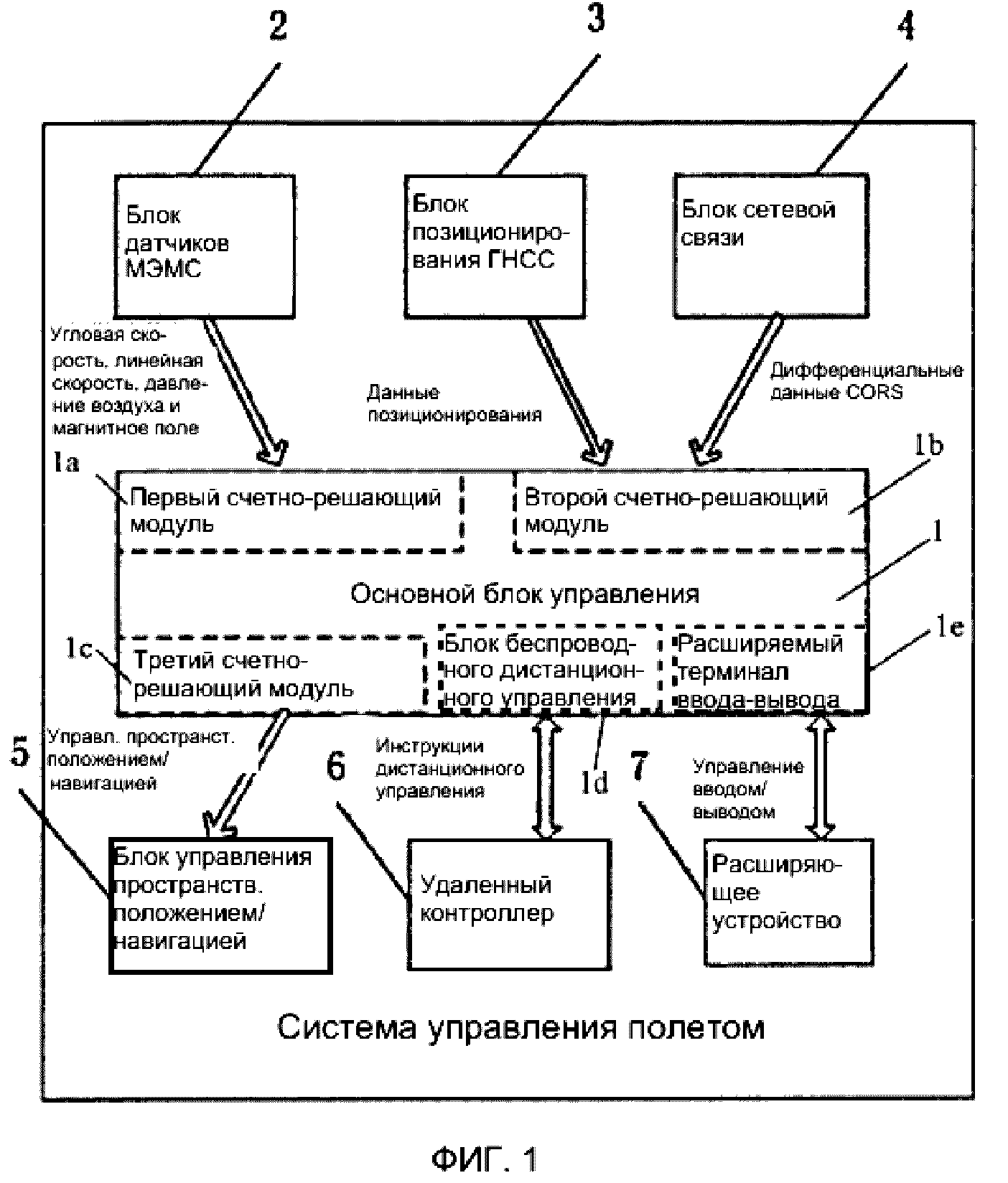
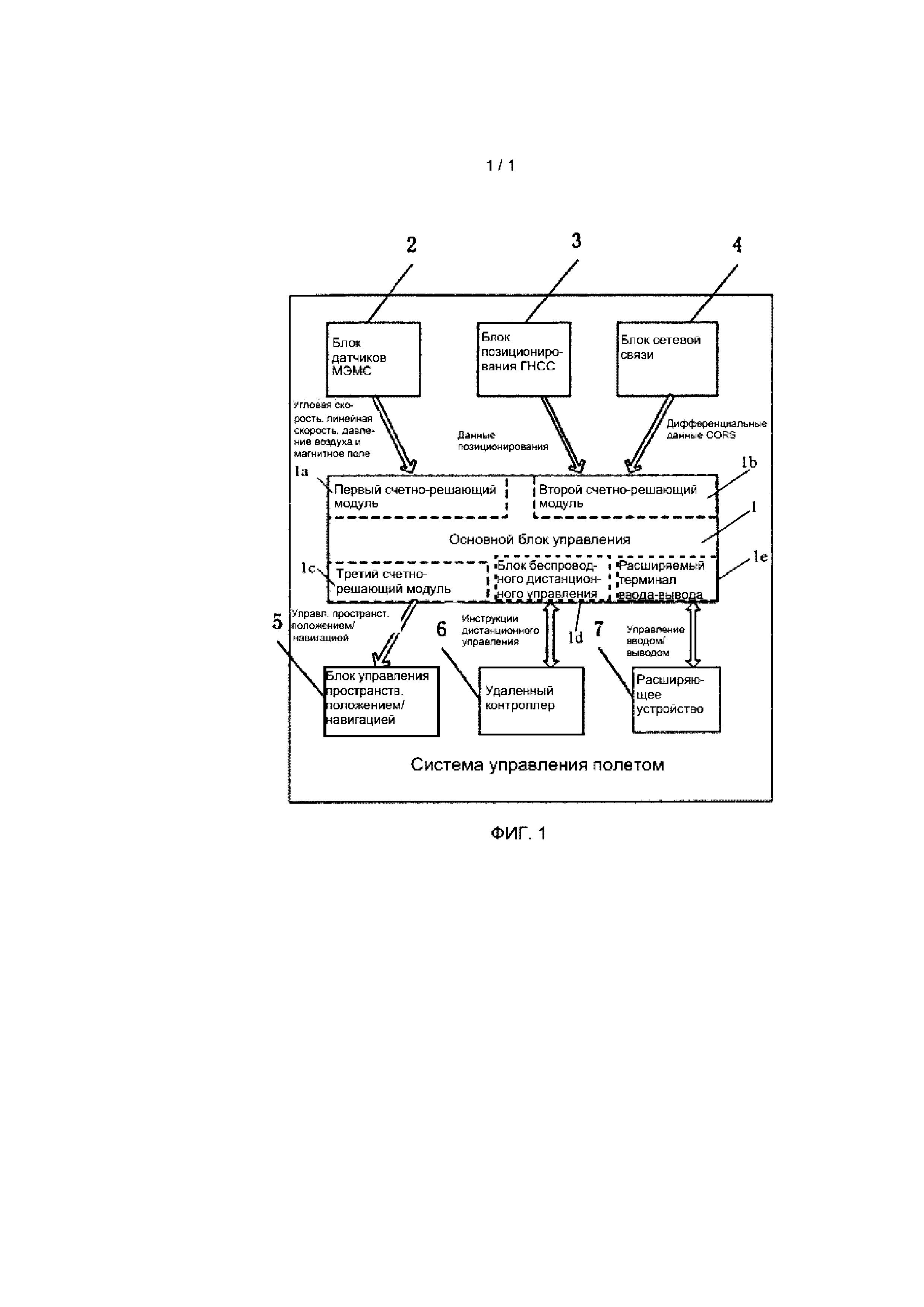
На фиг. 1 представлена принципиальная схема системы управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети CORS, предоставленной в соответствии с настоящим изобретением.
Осуществление изобретения
В последующих описаниях приведены многочисленные конкретные детали для полного понимания настоящего изобретения. Однако для специалистов в данной области техники очевидно, что настоящее изобретение может быть реализовано без одной или нескольких из данных деталей. В других примерах, некоторые технические признаки, известные в данной области техники, не описаны, во избежание путаницы с настоящим изобретением.
Для полного понимания настоящего изобретения в последующих описаниях будут предоставлены подробные этапы и подробные конструкции, чтобы ясно проиллюстрировать техническое решение настоящего изобретения. Предпочтительный вариант осуществления настоящего изобретения подробно описан ниже. Однако, помимо этих подробных описаний, настоящее изобретение может иметь другие варианты реализации.
Настоящее изобретение обеспечивает систему управления полетом беспилотного летательного аппарата с дифференциальным позиционированием на основе сети CORS, которая включает в себя:
блок 2 датчиков МЭМС для сбора данных угловой скорости, линейной скорости, давления воздуха и магнитного поля;
блок 3 позиционирования ГНСС для получения данных ГНСС о местоположении, причем блок 3 позиционирования ГНСС получает данные ГНСС позиционирования и выполняет расчет RTK совместно с дифференциальными данными, принимаемыми из сети CORS, для получения информации высокоточного позиционирования с точностью порядка сантиметров;
блок 4 сетевой связи для осуществления сетевой связи беспилотного летательного аппарата, входа в систему CORS и получения дифференциальных данных; дополнительно, при практическом применении по мере необходимости функция удаленного мониторинга может быть расширена за счет использования мобильной сети;
блок 5 управления пространственным положением/навигацией для управления пространственным положением и навигацией беспилотного летательного аппарата, при этом управление навигацией беспилотного летательного аппарата осуществляется посредством управления двигателем беспилотного летательного аппарата, скоростью вращения двигателя беспилотного летательного аппарата и углом поворота беспилотного летательного аппарата с помощью блока управления навигацией;
основной блок 1 управления, причем основной блок 1 управления содержит первый счетно-решающий модуль 1a, второй счетно-решающий модуль 1b и третий счетно-решающий модуль 1c.
Первый счетно-решающий модуль 1a соединен с блоком 2 датчиков МЭМС и используетcя для определения положения, направления и высоты в соответствии с принимаемыми данными угловой скорости, линейной скорости, давления воздуха и магнитного поля.
Второй счетно-решающий модуль 1b соединен с блоком 3 позиционирования ГНСС и блоком 4 сетевой связи, и используетcя для определения местоположения расчетом методом RTK в соответствии с принимаемыми данными о местоположении и дифференциальными данными CORS.
Третий счетно-решающий модуль 1c соединен с первым счетно-решающим модулем 1a и вторым счетно-решающим модулем 1b и используетcя для вывода команд управления пространственным положением/навигацией в блок 5 управления пространственным положением/навигацией на основе данных решения первого счетно-решающего модуля 1a и второго счетно-решающего модуля 1b.
В альтернативном варианте осуществления настоящего изобретения, блок датчиков МЭМС содержит акселерометр, гироскоп, электронный компас и барометр.
В альтернативном варианте осуществления настоящего изобретения, блок 4 сетевой связи представляет собой блок связи 2G, 3G или 4G.
В альтернативном варианте осуществления настоящего изобретения, система управления полетом беспилотного летательного аппарата дополнительно содержит блок 1d беспроводного дистанционного управления, который соединен с основным блоком 1 управления. Блок 1d беспроводного дистанционного управления используетcя для приема инструкции дистанционного управления, отправляемой внешним удаленным контроллером 6 и передает инструкции дистанционного управления на основной блок 1 управления. Основной блок 1 управления преобразует инструкции дистанционного управления и отправляет преобразованную инструкцию дистанционного управления на блок 5 управления пространственным положением/навигацией.
В альтернативном варианте осуществления настоящего изобретения система управления полетом беспилотного летательного аппарата дополнительно содержит расширяемый терминал 1e ввода-вывода. Расширяемый терминал 1e ввода-вывода соединен с модулем расширения функций основного блока 1 управления. Внешнее расширительное устройство 7, например, для расширенной аэрофотосъемки, защиты растений и т. д., подключается к системе управления полетом беспилотного летательного аппарата через расширяемый терминал 1e ввода-вывода.
В альтернативном варианте осуществления настоящего изобретения, система управления полетом беспилотного летательного аппарата дополнительно содержит модуль мониторинга (не показан). Модуль мониторинга соединен с основным блоком 1 управления и используетcя для сбора данных мониторинга во время навигации беспилотного летательного аппарата. Модуль мониторинга снабжен камерой.
В настоящем изобретении мобильная сеть 3G используется для получения дифференциальных данных от базовой станции CORS и осуществления дифференциального позиционирования RTK системы управления полетом, поэтому высокие требования потребительского рынка и профессиональной топографической съемки и картографии, касающиеся точности позиционирования беспилотных летательных аппаратов порядка сантиметров, могут быть удовлетворены. По сравнению с методом дифференциального позиционирования RTK, в котором используется автономная базовая станция и дифференциальные данные передаются радиостанцией, использование сети CORS для получения дифференциальных данных является более быстрым и эффективным. Кроме того, недостатки, обусловленные низкой точностью позиционирования на больших расстояниях и ограниченным расстоянием действия радиостанции(й), могут быть устранены, и это в большей степени соответствует тенденции развития RTK дифференциальных данных в будущем.
Предпочтительный вариант осуществления настоящего изобретения был описан выше. Следует понимать, что настоящее изобретение не ограничено конкретными вариантами осуществления, описанными выше. Устройства и конструкции, которые не описаны подробно в данном документе, следует понимать как реализуемые обычным способом, известным в данной области техники. Различные возможные изменения и модификации или эквивалентные варианты осуществления, полученные с помощью эквивалентных замен, могут быть получены любым специалистом в данной области техники из технического решения настоящего изобретения в соответствии со способом и техническими характеристиками, изложенными выше, без отклонения от технического решения настоящего изобретения, что не оказывает никакого влияния на сущность настоящего изобретения. Следовательно, любая простая модификация, эквивалентная замена и модификация, выполненная на основе вышеупомянутого варианта осуществления в соответствии с технической сущностью настоящего изобретения без отступления от содержания технического решения настоящего изобретения, все же должны рассматриваться как входящие в объем технического решения настоящего изобретения.
Способ обновления углового положения сельскохозяйственной машины, основанный на девятиосевом датчике на основе мэмс
Способ проверки точности измерения компенсации наклона при rtk
Способ автоматического переключения режима приема дифференциальных данных для экзамена по вождению и обучения вождению с использованием мобильной станции
Способ автоматической калибровки датчика угла для системы управления автоматическим приводом сельскохозяйственной машины
Способ измерения наклона измерительного приемника rtk
Гибкая структура линии для производства транспортных средств разных типов
Способ начального выравнивания устройства инерциальной навигации
Способ проверки точности измерения компенсации наклона при rtk
Способ автоматического переключения режима приема дифференциальных данных для экзамена по вождению и обучения вождению с использованием мобильной станции
Способ автоматической калибровки датчика угла для системы управления автоматическим приводом сельскохозяйственной машины
Способ измерения наклона измерительного приемника rtk
Кристаллическая форма соединения, подавляющего активность протеинкиназы, и её применение

