Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА ПО СИГНАЛАМ НАВИГАЦИОННЫХ СПУТНИКОВ
Вид РИД
Изобретение
Предлагаемое изобретение относится к навигации космического аппарата (КА) по сигналам навигационных спутников (НС), входящих в состав Глобальных Спутниковых Навигационных Систем (ГСНС), например, по сигналам НС ГЛОНАСС.
В настоящее время на многих КА установлена аппаратура спутниковой навигации (АСН), определяющая текущие координаты КА по сигналам НС, например, на американском сегменте Международной космической станции (АС МКС) установлена АСН SIGI, работающая по сигналам GPS, рассматриваемая в качестве аналога.
Известен способ-аналог определения координат КА по сигналам НС, включающий излучение радиосигналов от НС с известными параметрами орбиты в известные моменты времени, прием радиосигналов от n НС антеннами (Ан), установленными на КА, от HCi, находящихся в полях зрения соответствующих антенн, определение дальности между HCi и КА по разности времен приема и излучения радиосигнала, определение координат КА по измеренным дальностям di и координатам  HCi как координат точки, лежащей одновременно на n сферах радиуса di с центрами в точках
HCi как координат точки, лежащей одновременно на n сферах радиуса di с центрами в точках  (см. фиг. 1). Способ-аналог реализуется на АС МКС с помощью устройства АСН SIGI, включающего четыре антенны для приема сигналов НС GPS, формирующих СВЧ-сигналы, передаваемые НС GPS, которые по СВЧ-кабелю поступают в блок формирования дальностей и координат НС (БФДК НС), формирующие на выходе сигналы дальностей di от КА до НС и сигналы координат НС (i-1…n, где n - число НС, сигналы которых принимает Ан), поступающие в блоки определения координат КА (БОК КА), определяющие по дальностям di и координатам НС сигналы вектора координат КА, являющиеся выходами устройства-аналога АСН SIGI (см. например, Н.В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политика, С-Петербург 2014, раздел 7.1)
(см. фиг. 1). Способ-аналог реализуется на АС МКС с помощью устройства АСН SIGI, включающего четыре антенны для приема сигналов НС GPS, формирующих СВЧ-сигналы, передаваемые НС GPS, которые по СВЧ-кабелю поступают в блок формирования дальностей и координат НС (БФДК НС), формирующие на выходе сигналы дальностей di от КА до НС и сигналы координат НС (i-1…n, где n - число НС, сигналы которых принимает Ан), поступающие в блоки определения координат КА (БОК КА), определяющие по дальностям di и координатам НС сигналы вектора координат КА, являющиеся выходами устройства-аналога АСН SIGI (см. например, Н.В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политика, С-Петербург 2014, раздел 7.1)
Способ-аналог реализуется следующим образом. Для измерения дальности di формируемые НС сигналы промодулированы специальным модулирующим сигналом, позволяющим по текущей модуляции принятого сигнала определить момент времени излучения этого сигнала НС. Считая, для простоты, что часы НС и часы приемника сигнала абсолютно точные, определяют дальность от НС до КА по формуле:

где tПi - время приема i-го сигнала;
tui - время излучения сигнала i-го НС;
с - скорость света.
Для определения координат НС в любой требуемый момент времени в структуру сигнала НС закладывается так называемый сигнал данных, содержащий необходимую потребительскую информацию для решения навигационной задачи, в том числе и данные об эфемеридах НС. Эфемериды НС - это набор параметров, позволяющих вычислить координаты НС на любой момент времени. Например, (см. Глобальная Навигационная Спутниковая Система ГЛОНАСС ИКД ГЛОНАСС, Навигационный радиосигнал в диапазонах L1, L2, (редакция 5.1) М., 2008) для НС ГЛОНАСС эфемериды включают:
toe - опорное время эфемерид;
 - координаты НС в момент toe;
- координаты НС в момент toe;
 - скорость НС в момент toe.
- скорость НС в момент toe.
В навигационном приемнике в процессе обработки принятого от НС сигнала выделяются массивы данных, в том числе и массив эфемерид НС. Определение вектора координат НС в момент tП осуществляется путем интегрирования уравнений движения НС ГЛОНАСС от момента toe, для которого известен вектор состояния 
 до момента tП. В простейшем случае, если toe - tП мало (например, меньше 1 с), то интегрирование может быть выполнено по формуле:
до момента tП. В простейшем случае, если toe - tП мало (например, меньше 1 с), то интегрирование может быть выполнено по формуле:

где  - известный вектор ускорения НС в точке
- известный вектор ускорения НС в точке  [1].
[1].
Аналогичные действия выполняются для всех НС, сигналы которых попадают в поле зрения антенн. В результате формируется массив di,  где i=1…n, n - число НС, видимых антенными. По значениям di и определяют
где i=1…n, n - число НС, видимых антенными. По значениям di и определяют  В плоском случае определение координат
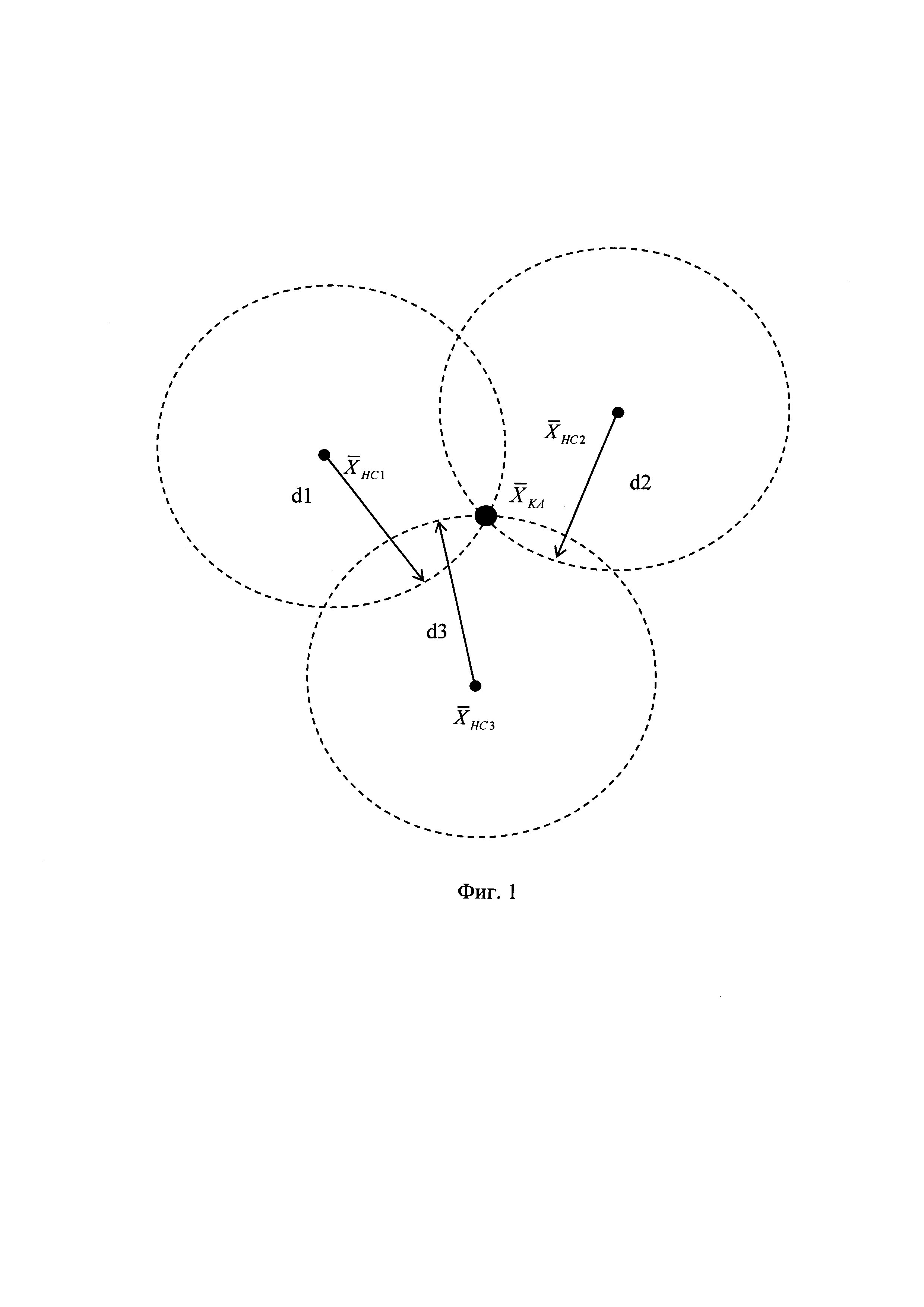
В плоском случае определение координат  иллюстрирует фиг. 1, на которой вектор
иллюстрирует фиг. 1, на которой вектор  является общей точкой пересечения всех n окружностей радиуса di с центрами в точках
является общей точкой пересечения всех n окружностей радиуса di с центрами в точках 
В пространственном случае координаты  определяются как решение системы n нелинейных уравнений:
определяются как решение системы n нелинейных уравнений:
Устройство-аналог включает:
- четыре антенны (Ан), установленных на поверхности КА;
- четыре блока формирования дальностей и координат (БФДК) НС, на входы которых поступают СВЧ-сигналы от соответствующих антенн, а на выходах формируются сигналы дальностей di от КА до i-го НС и координат  i-го НС;
i-го НС;
- четыре блока определения координат (БОК) КА, на входы которых поступают сигналы di и  от соответствующих УФДК НС, а на выходах формируются сигналы
от соответствующих УФДК НС, а на выходах формируются сигналы 
Аппаратура БФДК НС представляет собой так называемые корреляторы, выпускаемые во всем мире миллионными тиражами и обеспечивающими первичную обработку сигналов НС. Они производят первичные измерения, в том числе, измерения дальности и дешифровку информационных сигналов, в том числе, эфемерид, формируя векторы 
БОК КА аппаратно представляет собой процессор, формирующий по векторам координат  НС, например, по алгоритму (2), вектор
НС, например, по алгоритму (2), вектор  путем решения системы (3).
путем решения системы (3).
Система SIGI АС МКС включает четыре одинаковых контура Ан-БФДК НС-БОК КА, так как антенны сильно затенены элементами конструкции МКС, и, в зависимости от ориентации МКС, ориентации солнечных батарей и тепловых радиаторов станции, от положения НС на небесной сфере, в поле зрения антенн могут попадать разное количество НС, в результате на выходах БОК КА формируются разные векторы  В бортовой вычислительной системе (БВС) МКС значения векторов
В бортовой вычислительной системе (БВС) МКС значения векторов  проходят специальную обработку, результатом которой является гарантированное формирование осредненного вектора
проходят специальную обработку, результатом которой является гарантированное формирование осредненного вектора 
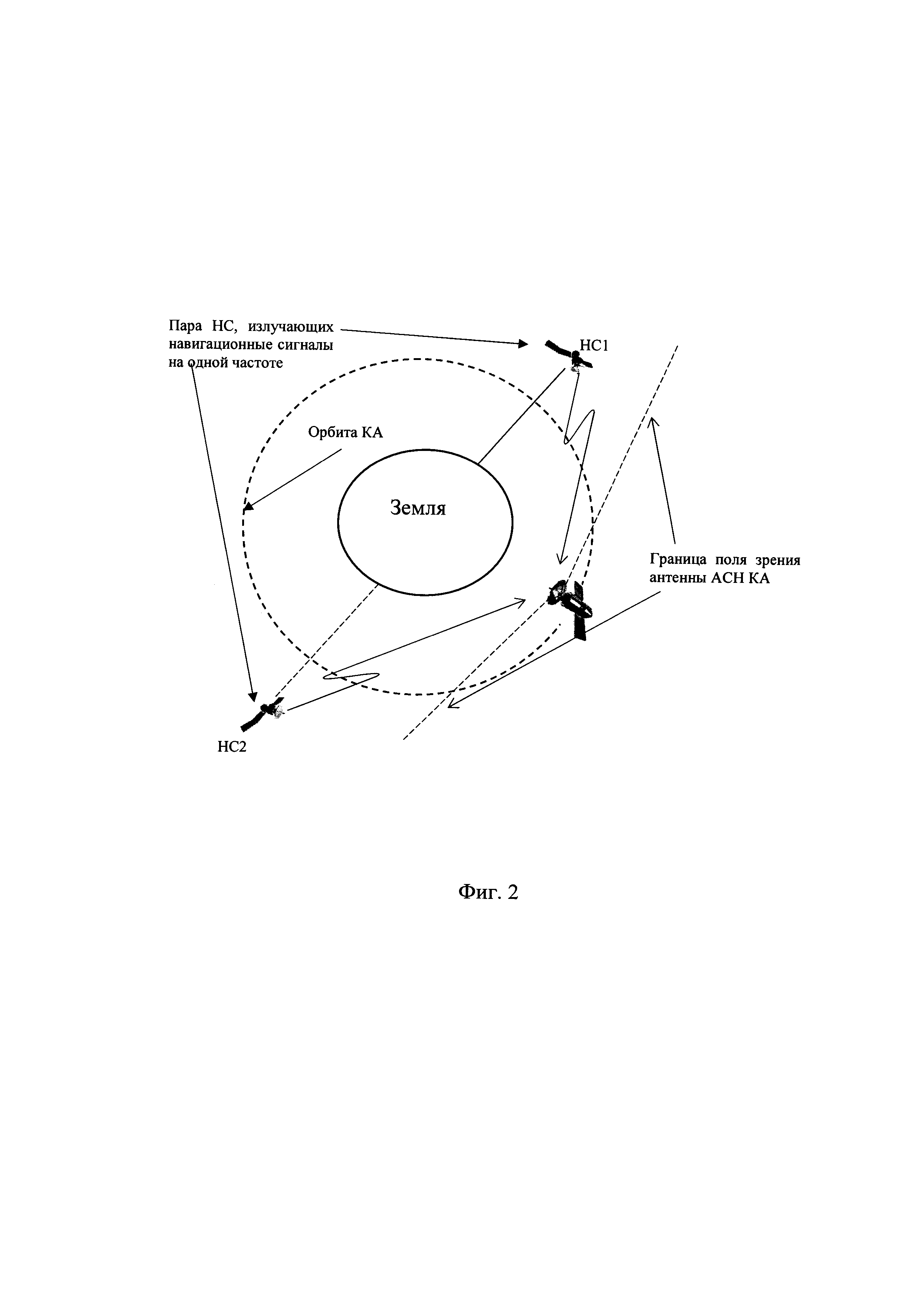
Недостатком аналога является то, что при работе АСН КА по сигналам группировки НС с частотным разделением сигналов, включающей пары диаметрально противоположных спутников-антиподов, работающих на одной частоте, происходят сбои и ошибочные измерения при попадании двух спутников пары в поле зрения одной антенны АСН КА. Например, частотное разделение навигационных сигналов реализовано в спутниковой системе ГЛОНАСС. Система включает 24 спутника, работающих на 12-и частотах. На одной и той же частоте работают спутники, находящиеся на диаметрально противоположных сторонах орбиты. В таком случае для наземного потребителя не может возникнуть ситуации, при которых спутники, работающие на одной частоте, одновременно попадают в поле зрения антенны АСН. Но такая ситуация возможна для космического потребителя. Пример такой ситуации приведен на фиг. 2, где в поле зрения антенны АСН КА находятся диаметрально противоположные НС. В этом случае, например, принимая сигналы от одного НС, АСН может выполнять навигационные расчеты в предположении, что принимаемый сигнал получен от другого НС. В этом случае формируются существенно ошибочные измерения. Такая ситуация возникала на МКС, в результате чего АСН МКС формировала текущую высоту полета ниже уровня моря.
Известен принятый в качестве прототипа способ определения координат космического аппарата по сигналам навигационных спутников, включающий излучение радиосигналов от навигационных спутников с известными параметрами орбиты в известные моменты времени, прием радиосигналов от навигационных спутников антеннами, установленными на космическом аппарате, от i навигационных спутников, находящихся в полях зрения соответствующих антенн, определение дальности di между i навигационными спутниками и космическим аппаратом по разности времени приема и излучения радиосигнала, определение координат космического аппарата по измеренным дальностям и координатам  навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках
навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках  в котором определяют векторы от центра масс космического аппарата до антенн в связанной с космическим аппаратом системе координат, определяют ориентацию космического аппарата в гринвичской системе координат, определяют векторы от центра масс космического аппарата до антенн в гринвичской системе координат, определяют проекции этих векторов на направления от космического аппарата на навигационные спутники, суммируют эти проекции с измеренными дальностями соответствующих антенн, по полученным суммам определяют координаты космического аппарата (см. Патент на изобретение №2654321 «Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников» Авторы: М.В. Михайлов, С.Н. Рожков).
в котором определяют векторы от центра масс космического аппарата до антенн в связанной с космическим аппаратом системе координат, определяют ориентацию космического аппарата в гринвичской системе координат, определяют векторы от центра масс космического аппарата до антенн в гринвичской системе координат, определяют проекции этих векторов на направления от космического аппарата на навигационные спутники, суммируют эти проекции с измеренными дальностями соответствующих антенн, по полученным суммам определяют координаты космического аппарата (см. Патент на изобретение №2654321 «Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников» Авторы: М.В. Михайлов, С.Н. Рожков).
Устройство определения координат космического аппарата по сигналам навигационных спутников, реализующее способ-прототип, включающее m антенн, выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат навигационных спутников, блок определения координат космического аппарата, а также блок ориентации и задатчик координат антенн, выходы которых подключены к соответствующим входам преобразователя координат антенн, выходы которого подключены к первым входам формирователей поправок дальностей, ко вторым входам которых подключены первые выходы блоков формирования дальностей и координат навигационных спутников, выходы формирователей поправок дальностей подключены к входам m сумматоров, ко вторым входам которых подключены вторые выходы блоков формирования дальностей и координат навигационных спутников, выходы сумматоров подключены к первым входам блока определения координат космического аппарата, ко вторым входам которого подключены первые выходы блоков формирования дальностей и координат навигационных спутников, выход блока определения координат космического аппарата является выходом заявляемого устройства, (см. Патент на изобретение №2654321).
Устройство-прототип определения координат космического аппарата по сигналам навигационных спутников включает m антенн (Ан), выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат (БФДК) навигационных спутников, а также блок определения координат (БОК) космического аппарата, блок ориентации (БО) и задатчик координат антенн (ЗКА), выходы которых подключены к соответствующим входам преобразователя координат антенн (ПКА), выходы которого подключены к первым входам формирователей поправок дальностей (ФПД), ко вторым входам которых подключены соответственно первые выходы блоков формирования дальностей и координат (БФДК) навигационных спутников, выходы формирователей поправок дальностей (ФПД) подключены к входам m сумматоров (С), ко вторым входам которых подключены вторые выходы блоков формирования дальностей и координат (БФДК) навигационных спутников, выходы сумматоров (С) подключены к первым входам блока определения координат (БОК) космического аппарата, ко вторым входам которого подключены первые выходы блоков формирования дальностей и координат (БФДК) навигационных спутников выход блока определения координат (БОК) космического аппарата является выходом заявляемого устройства.
Недостатком способа и устройства-прототипа является возможность сбоев и ошибочных измерений при работе АСН по сигналам НС с частотным разделением сигналов, включающих пары диаметрально противоположных спутников-антиподов, работающих на одной частоте, как это реализовано в системе ГЛОНАСС.
Технический результат заключается в повышении точности определения орбиты КА, исключении сбоев и ошибочных измерений.
Технический результат достигается тем, что в способе определения координат КА по сигналам навигационных спутников, включающем излучение радиосигналов от навигационных спутников с известными параметрами орбиты в известные моменты времени, отслеживание радиосигналов приемными антеннами, установленными на космическом аппарате, от i навигационных спутников, находящихся в полях зрения соответствующих приемных антенн, определение дальности di между i навигационными спутниками и космическим аппаратом по разности времени приема и излучения радиосигнала, определение координат космического аппарата по измеренным дальностям и координатам навигационных спутников в моменты измерений, как координаты точки, лежащей одновременно на n сферах с центрами в точках определение ориентации космического аппарата в гринвичской системе координат, в отличие от известного, определяют углы между осями приемных антенн и направлениями на навигационные спутники с частотным разделением сигналов, включающими пары спутников, излучающих радиосигналы на одной частоте, определяют текущую высоту орбиты космического аппарата, фиксируют момент времени выхода из-за горизонта одного из пары спутников, отслеживание сигналов первого и второго спутников пары выполняют антеннами, для которых первый из спутников пары находится в поле зрения одной антенны, а второй из спутников пары находится в поле зрения другой антенны, при этом первый из спутников пары находится вне поля зрения второй антенны, а второй из спутников пары находится вне поля зрения первой антенны, определение координат космического аппарата выполняют по всем навигационным спутникам, не затененным Землей.
Технический результат достигается тем, что в устройстве определения координат космического аппарата по сигналам навигационных спутников, реализующем способ, включающем m антенн, выходы которых подключены к соответствующим входам блоков формирования дальностей и координат навигационных спутников, выходы которых подключены к входам блока определения координат космического аппарата, выход которого является выходом заявляемого устройства, блок определения ориентации, в отличие от известного, в него дополнительно введены задатчик направления осей антенн в системе координат космического аппарата, выход которого подключен к входу преобразователя осей антенн в гринвичскую систему координат, ко второму входу которого подключен выход блока ориентации, задатчик начальных координат спутников, выход которого подключен к входу формирователя текущих координат спутников, выход которого подключен к первому входу формирователя углов направления на спутники, ко второму входу которого подключен выход преобразователя осей антенн в гринвичскую систему координат, а к третьему входу формирователя углов направления на спутники подключен выход блока определения координат космического аппарата, выход формирователя углов направления на спутники подключен к первому входу блока разрешения отслеживания спутников, формирователь текущей высоты полета космического аппарата, к входу которого подключен выход блока определения координат космического аппарата, а выход подключен к входу формирователя углового размера Земли, выход которого подключен ко второму входу блока разрешения отслеживания спутников, задатчик угла поля зрения антенн, выход которого подключен к третьему входу блока разрешения отслеживания спутников, выход которого подключен к входам антенн.
Технический результат заключается в обеспечении возможности определения орбиты и повышение точности ее определения за счет увеличения числа НС, по измерениям которых осуществляется определение орбиты. Увеличение числа НС обеспечивается за счет создания возможности использовать для решения навигационной задачи всех НС группировки, не затененных Землей, включая пары НС-антиподов, излучающих сигналы на одной частоте.
Суть изобретения поясняется графическими материалами, на которых приведены:
На фиг. 1 - графическая интерпретация решения задачи навигации по измеренным дальностям di и координатам НС 
На фиг. 2 - пример взаимного расположения КА и НС, когда сигналы двух диаметрально расположенных НС, работающих на одной частоте, попадают в поле зрения приемной антенны АСН КА;
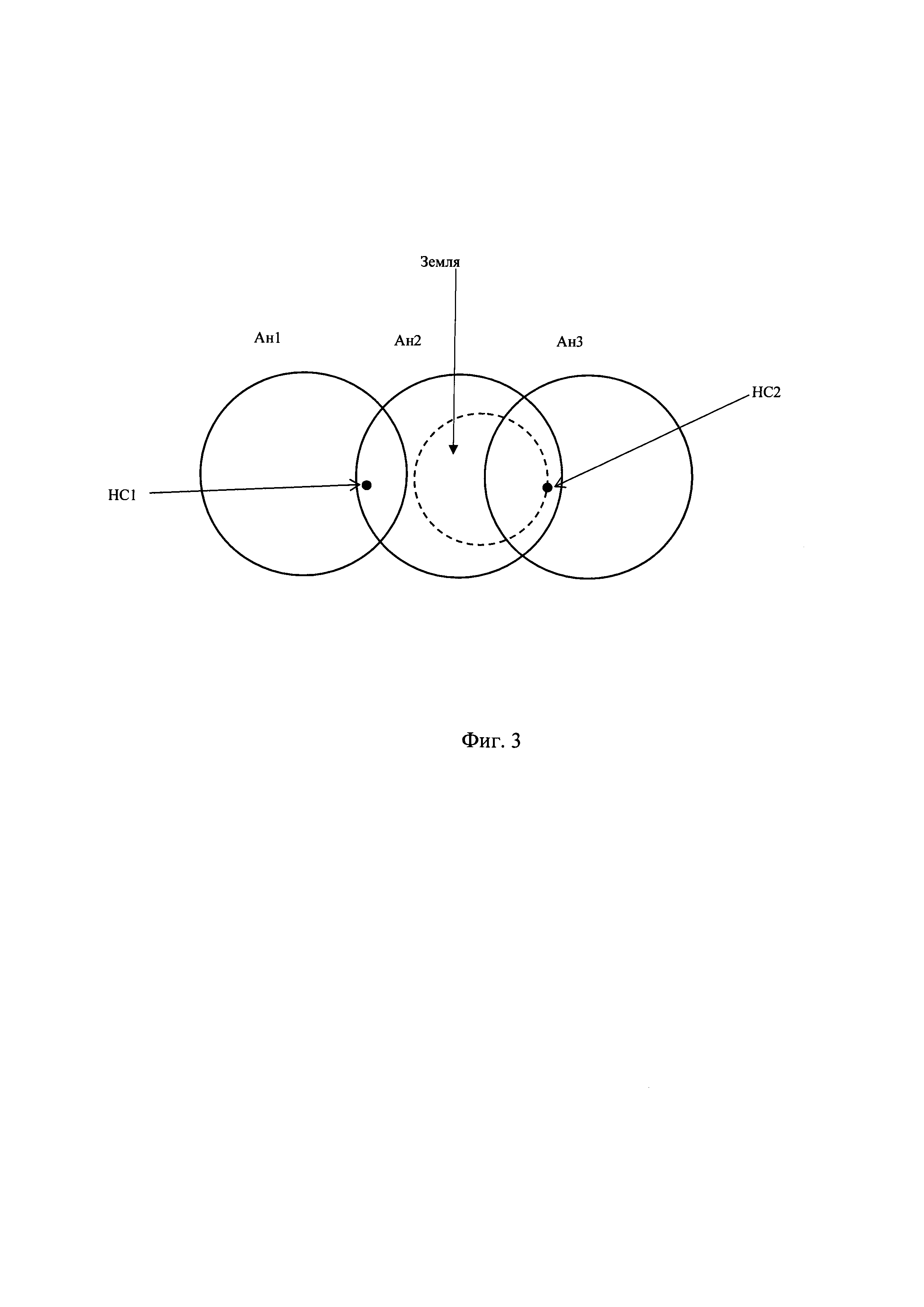
На фиг. 3 - геометрическая интерпретация предлагаемого способа - пример расположения НС, работающих на одной частоте, в полях зрения приемных антенн АСН-КА, в котором необходимо исключить отслеживание антенной 2 сигналов пары НС, работающих на одной частоте;
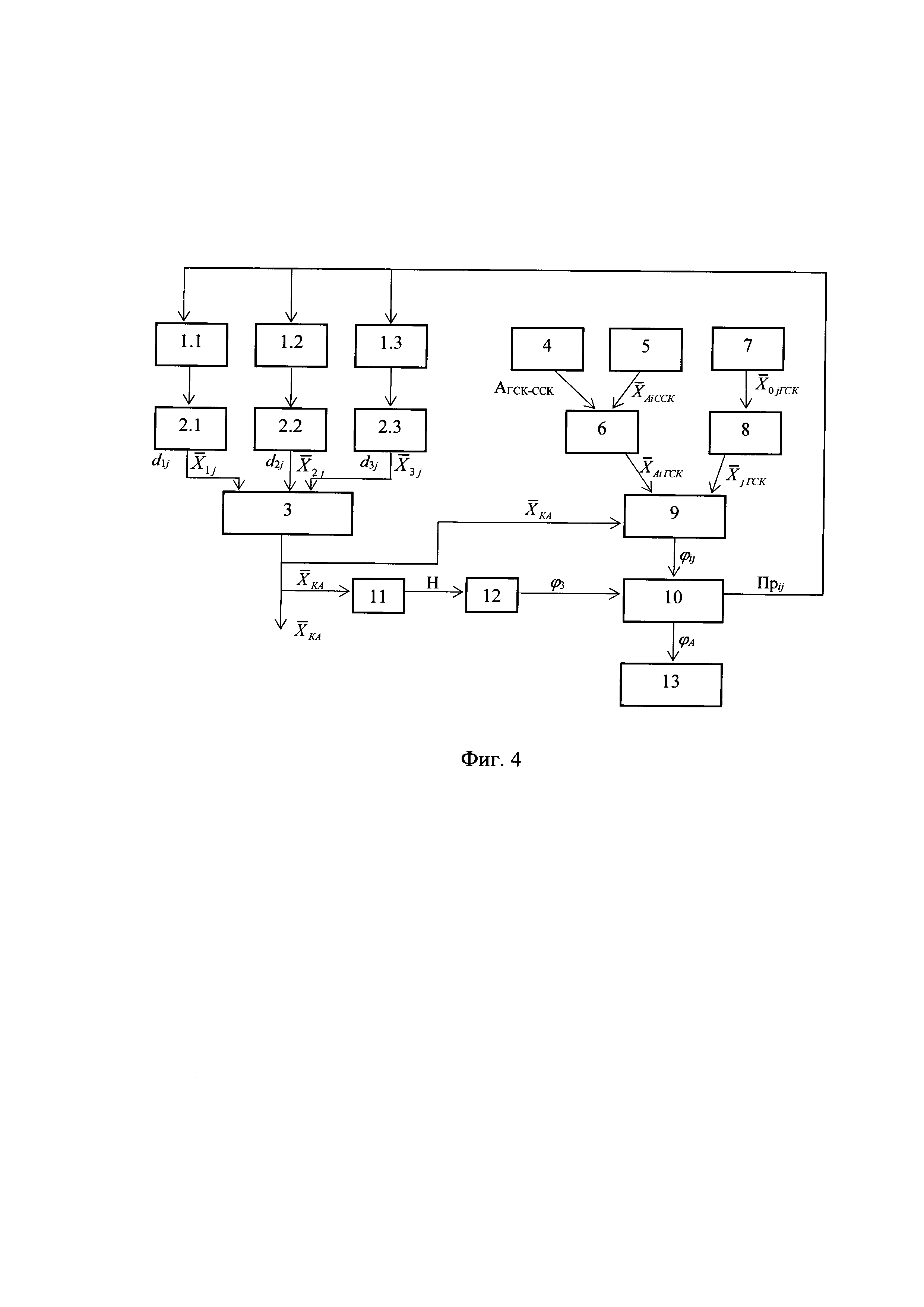
На фиг. 4 - блок-схема предлагаемого устройства;
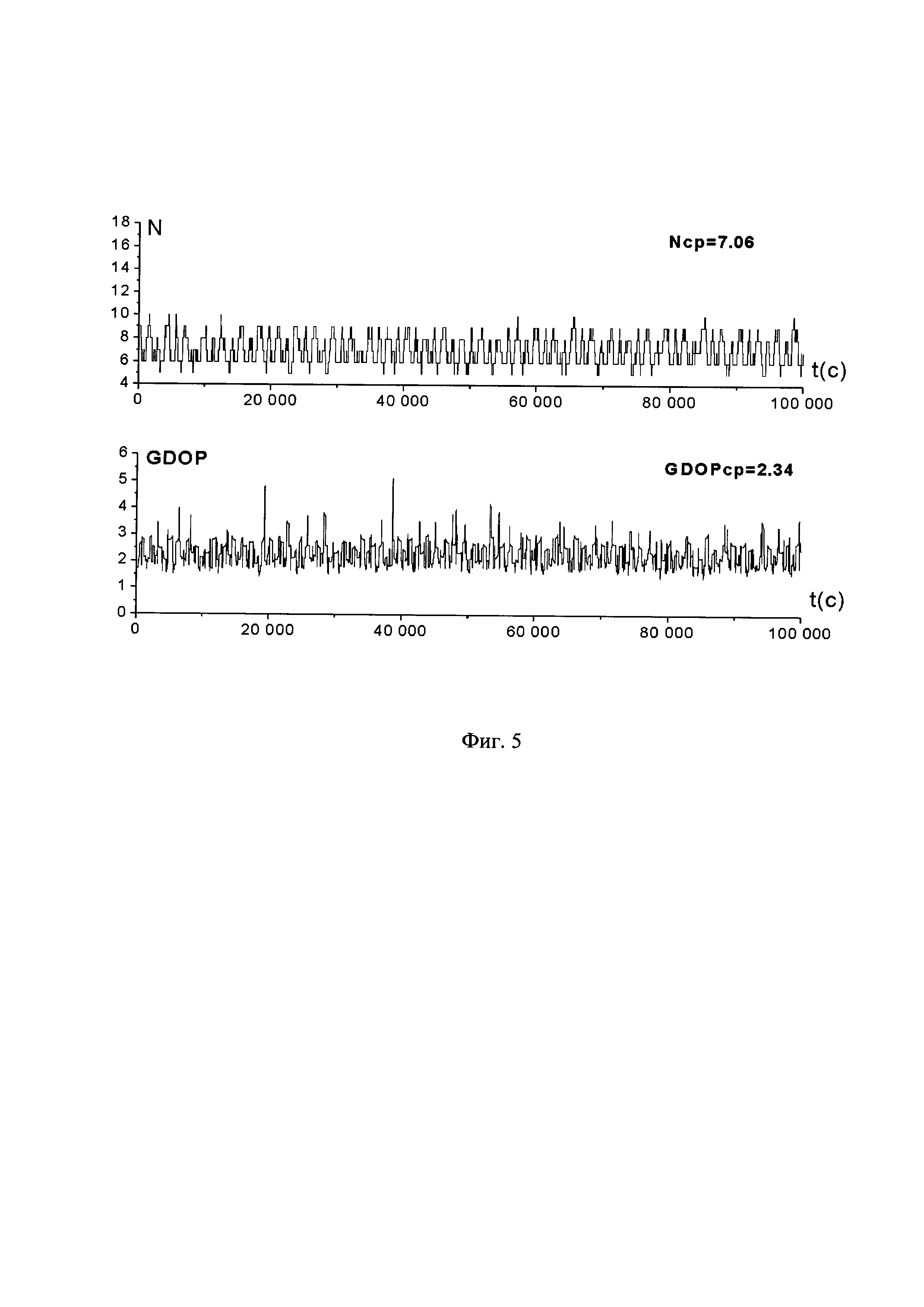
На фиг. 5 - графики числа видимых НС ГЛОНАСС и уровня геометрического фактора GDOP при работе прототипа;
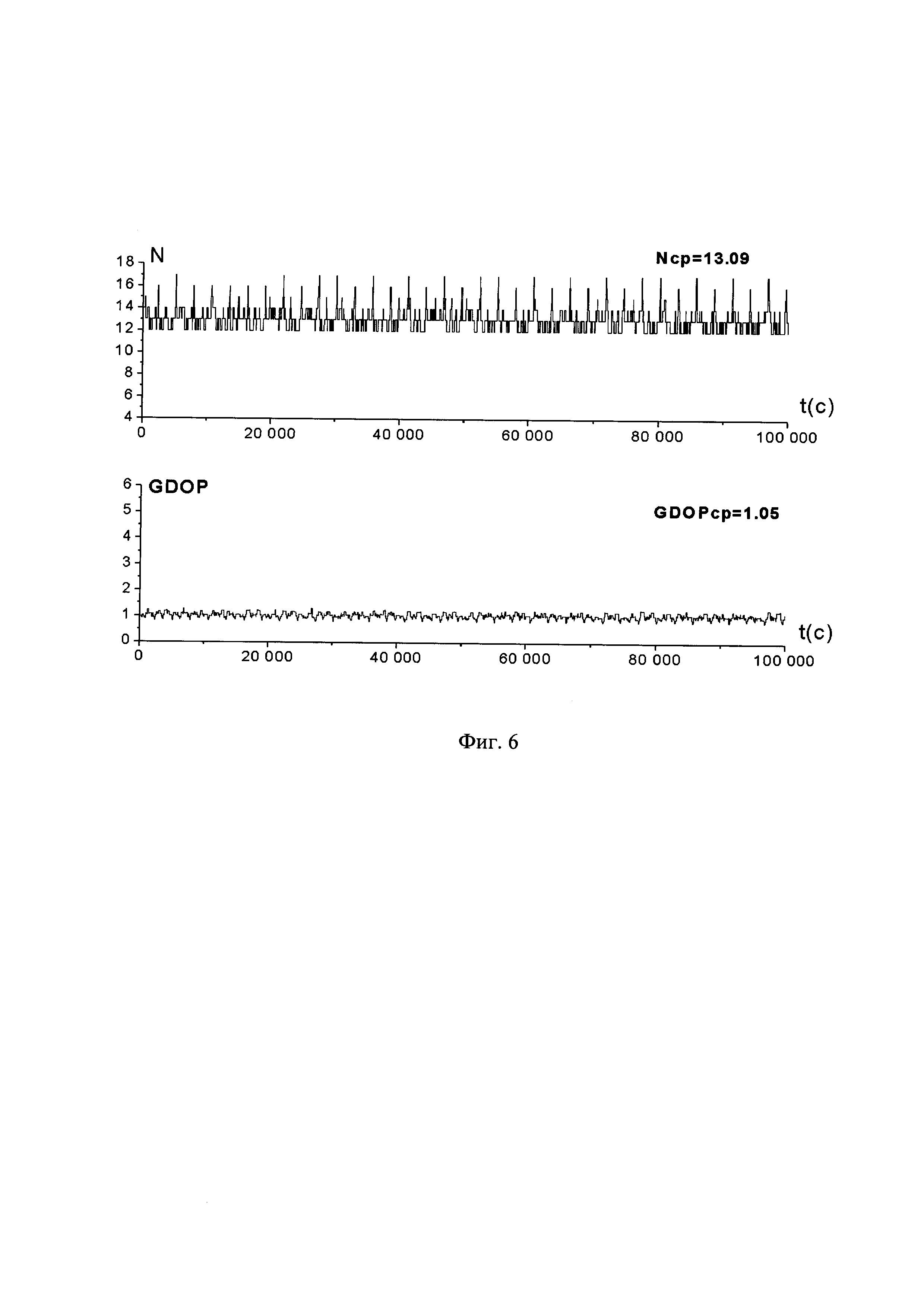
На фиг. 6 - графики числа видимых НС ГЛОНАСС и уровня геометрического фактора GDOP при использовании предлагаемого технического решения.
Сутью предлагаемого технического решения является обеспечение возможности использования для определения координат КА всех не затененных Землей НС, работающих по схеме ГЛОНАСС, использующей частотное разделение сигналов, в которой диаметрально противоположные спутники формируют сигналы на одной и той же частоте. В этом случае нельзя допустить, чтобы сигналы обоих спутников принимались одной антенной АСН КА. Фиг. 3 демонстрирует возможность такой ситуации, когда в поле зрения антенны Ан2 попадают оба спутника. В предлагаемом техническом решении при возникновении указанной ситуации антенна Ан2 прекращает отслеживание сигналов, передаваемых этими спутниками, а сигналы этих спутников отслеживаются другими антеннами Ан1 и Ан3, в поля зрения которых попадает только по одному спутнику из диаметрально противоположной пары НС1 и НС2.
Предлагаемое устройство демонстрирует фиг. 4, на которой приведена его блок-схема. Устройство определения координат КА по сигналам НС включает m антенн 1.1, 1.2, 1.3, выходы которых подключены к соответствующим входам m блоков формирования дальностей и координат (БФДК) 2.1, 2.2, 2.3 навигационных спутников, выходы которых подключены к входам блока определения координат (БОК) 3 КА, выход которого является выходом заявляемого устройства, блок ориентации (БО) 4, в устройство дополнительно введены: задатчик направления осей антенн (ЗНОА) 5 в системе координат КА, выход которого подключен к входу преобразователя осей антенн (ПОА) 6 в гринвичскую систему координат, ко воторому входу которого подключен выход БО 4, задатчик начальных координат спутников (ЗНКС) 7, выход которого подключен к входу формирователя текущих координат спутников (ФТКС) 8, выход которого подключен к первому входу формирователя углов направления на спутники (ФУНС) 9, ко второму входу которого подключен выход ПОА 6, а к третьему входу ФУНС 9 подключен выход БОК 3, выход ФУНС 9 подключен к первому входу блока разрешения отслеживания спутников (БРОС) 10, формирователь текущей высоты (ФТВ) 11 полета КА, к входу которого подключен выход БОК 3, а выход ФТВ 11 подключен к входу формирователя углового размера Земли (ФУРЗ) 12, выход которого подключен ко второму входу БРОС 10, задатчик угла поля зрения антенн (ЗУПЗА) 13, выход которого подключен к третьему входу БРОС 10, выход которого подключен к входам антенн 1.
Рассмотрим функционирование предлагаемого решения.
Предлагаемой устройство для m=3 включает антенны 1.1, 1.2, 1.3 приема сигналов навигационных спутников, формирующих СВЧ-сигналы, передаваемые по СВЧ-кабелям в три соответствующие БФДК 2.1, 2.2, 2.3, формирующее на выходе сигналы дальностей dij от Антi до HCij и сигналы координат  соответствующих НС, формируемых по принимаемым эфемеридам НС, выходы БФДК подключены к соответствующим входам БОК 3, формирующему по принятым данным вектор координат КА, выход БОК 3 является и выходом всего устройства, БО 4 формирует на выходе матрицу АГ-С перехода из гринвичской системы координат (ГСК) в связанную с КА систему координат (ССК), ЗНОА 5 формирует единичные векторы осей антенн АСН в ССК
соответствующих НС, формируемых по принимаемым эфемеридам НС, выходы БФДК подключены к соответствующим входам БОК 3, формирующему по принятым данным вектор координат КА, выход БОК 3 является и выходом всего устройства, БО 4 формирует на выходе матрицу АГ-С перехода из гринвичской системы координат (ГСК) в связанную с КА систему координат (ССК), ЗНОА 5 формирует единичные векторы осей антенн АСН в ССК  являющиеся константами, выходы ЗНОА 5 и выход БО 4 поступают на входы ПОА 6, обеспечивающего преобразование осей антенн из ССК в ГСК путем умножения матрицы АГ-С на векторы в результате чего формируются векторы ЗНКС 7 формируют константы, содержащиеся в принимаемом альманахе ГЛОНАСС, соответствующие начальным координатам НС в ГСК. Выход ЗНКС 7 поступает на вход ФТКС 8, обеспечивающий преобразование начальных координат НС к текущим путем интегрирования уравнений движения спутника от начального момента t0 до текущего момента t, выход ФТКС 8 подключен к входу ФУНС 9, ко второму входу которого подключен выход ПОА 6, формирующего направление осей антенн в ГСК. К третьему входу ФУНС 9 подключен выход БОК 3, формирующий вектор текущих координат КА
являющиеся константами, выходы ЗНОА 5 и выход БО 4 поступают на входы ПОА 6, обеспечивающего преобразование осей антенн из ССК в ГСК путем умножения матрицы АГ-С на векторы в результате чего формируются векторы ЗНКС 7 формируют константы, содержащиеся в принимаемом альманахе ГЛОНАСС, соответствующие начальным координатам НС в ГСК. Выход ЗНКС 7 поступает на вход ФТКС 8, обеспечивающий преобразование начальных координат НС к текущим путем интегрирования уравнений движения спутника от начального момента t0 до текущего момента t, выход ФТКС 8 подключен к входу ФУНС 9, ко второму входу которого подключен выход ПОА 6, формирующего направление осей антенн в ГСК. К третьему входу ФУНС 9 подключен выход БОК 3, формирующий вектор текущих координат КА  ФУНС 14 по текущим координатам НС и КА, и векторам направлений антенн формирует углы ϕAij между направлениями осей антенн и направлением на HCj. Выход ФУНС 9 ϕAij подключен к первому входу БРОС 10. К входу ФТВ 11 подключен выход БОК 3, формирующий вектор текущих координат КА
ФУНС 14 по текущим координатам НС и КА, и векторам направлений антенн формирует углы ϕAij между направлениями осей антенн и направлением на HCj. Выход ФУНС 9 ϕAij подключен к первому входу БРОС 10. К входу ФТВ 11 подключен выход БОК 3, формирующий вектор текущих координат КА  . На выходе ФТВ 11 по вектору координат КА и известному радиусу Земли формируется текущая высота орбиты КА Н. Выход ФТВ 11 подключен к входу ФУРЗ 12, в котором на текущей высоте КА и известному радиусу Земли формируется угловой размер Земли ϕ. Выход ФУРЗ 12 подключен к третьему входу БРОС 10, в котором для всех антенн и всех НС, находящихся в полях зрения соответствующих антенн, но не затененных Землей, формируются сигналы разрешения отслеживания сигналов j-х НС i-ми антеннами. Для этого для каждой пары спутников, передающих сигналы на одной частоте, по углам ϕij выполняется проверка на наличие двух НС в поле зрения одной антенны. В этом случае БРОС 10 снимает сигнал разрешения отслеживания данной антенной этих НС. Выходы БРОС 10 представляют собой например, релейные сигналы разрешения отслеживания спутников соответствующим антеннам. При нахождении пары спутников, работающих на одной частоте, в поле зрения одной антенны, сигнал разрешения снимается, и данная пара спутников прекращает отслеживаться данной антенной, но они продолжают отслеживаться другими антеннами, в поле зрения которых попадает только один НС пары. Например, на фиг. 3 показаны положения пары НС в полях зрения антенн Ант 1, Ант. 2, Ант 3. Так как оба спутника пары одновременно находятся в поле зрения Ант 2, БРОС 10, в соответствии с описанной логикой работы, снимает разрешение на отслеживание этих спутников антенной Ант 2. Но разрешение отслеживания не снимается для антенн Ант 1 и Ант 3, так как в их полях зрения находятся только по одному НС пары. Поэтому оба НС пары продолжают отслеживаться, в результате измерения координат КА выполняются по всем НС, не затененным Землей, в то время, как в прототипе такие спутники исключаются из мерного созвездия.
. На выходе ФТВ 11 по вектору координат КА и известному радиусу Земли формируется текущая высота орбиты КА Н. Выход ФТВ 11 подключен к входу ФУРЗ 12, в котором на текущей высоте КА и известному радиусу Земли формируется угловой размер Земли ϕ. Выход ФУРЗ 12 подключен к третьему входу БРОС 10, в котором для всех антенн и всех НС, находящихся в полях зрения соответствующих антенн, но не затененных Землей, формируются сигналы разрешения отслеживания сигналов j-х НС i-ми антеннами. Для этого для каждой пары спутников, передающих сигналы на одной частоте, по углам ϕij выполняется проверка на наличие двух НС в поле зрения одной антенны. В этом случае БРОС 10 снимает сигнал разрешения отслеживания данной антенной этих НС. Выходы БРОС 10 представляют собой например, релейные сигналы разрешения отслеживания спутников соответствующим антеннам. При нахождении пары спутников, работающих на одной частоте, в поле зрения одной антенны, сигнал разрешения снимается, и данная пара спутников прекращает отслеживаться данной антенной, но они продолжают отслеживаться другими антеннами, в поле зрения которых попадает только один НС пары. Например, на фиг. 3 показаны положения пары НС в полях зрения антенн Ант 1, Ант. 2, Ант 3. Так как оба спутника пары одновременно находятся в поле зрения Ант 2, БРОС 10, в соответствии с описанной логикой работы, снимает разрешение на отслеживание этих спутников антенной Ант 2. Но разрешение отслеживания не снимается для антенн Ант 1 и Ант 3, так как в их полях зрения находятся только по одному НС пары. Поэтому оба НС пары продолжают отслеживаться, в результате измерения координат КА выполняются по всем НС, не затененным Землей, в то время, как в прототипе такие спутники исключаются из мерного созвездия.
Графики, приведенные на фиг. 5 и 6, демонстрируют положительный эффект предложенного решения при работе АСН по сигналам спутников системы ГЛОНАСС, в которой 24 НС разбиты на 12 диаметрально расположенных пар, работающих на одной частоте. На фиг. 5 приведены графики числа используемых НС ГЛОНАСС в АСН низкоорбитального КА с высотой орбиты 400 км, а также величины геометрического фактора GDOP при работе по прототипу, когда, с целью исключения возможности одновременного попадания в поле зрения одной антенны двух спутников пары, антенны отслеживают только спутники, находящиеся на 5° выше плоскости местного горизонта. Из приведенных графиков видно, что число используемых НС на интервале 100000 с в среднем составляет 7 спутников, а уровень GDOP в среднем составляет величину 2,3. На фиг. 6 приведены аналогичные графики для предлагаемого технического решения, позволяющего принимать в обработку все видимые (не затененные Землей) спутники. Из приведенных графиков видно, что среднее число НС, используемых для решения навигационной задачи, составляет 13 спутников, а средний уровень GDOP, благодаря увеличению числа НС, по сравнению с прототипом понизился более чем в два раза и составил величину 1,05. Это означает, что точность навигации при реализации предложенного решения, возрастающая обратно пропорционально величине уровня GDOP, повысится в ~2 раза. Следует заметить, что из-за малого числа видимых НС ГЛОНАСС, при использовании известного технического решения, и из-за высокого уровня GDOP в измерениях АСН имеются интервалы времени, когда решение навигационной задачи отсутствует. Предлагаемое техническое решение обеспечивает почти двукратное увеличение числа используемых для навигации НС, благодаря чему интервалы отсутствия навигационного решения исключаются, и навигация по сигналам ГЛОНАСС может выполняться без параллельного использования сигналов спутников GPS.
Список литературы
1. Глобальная Навигационная Спутниковая Система ГЛОНАСС ИКД ГЛОНАСС, Навигационный радиосигнал в диапазонах L1, L2, (редакция 5.1) М., 2008.
2. Н.В. Михайлов. Автономная навигация космических аппаратов при помощи спутниковых радионавигационных систем. Политехника, Санкт-Петербург 2014, раздел 7.1
3. В.Н. Бранец, Е.А. Микрин, В.Н. Платонов, С.Н. Евдокимов, М.В. Михайлов, С.Н. Рожков, Р.Ф. Муртазин, Б.В. Шебшаевич, В. Пантер, Дж. Клабб «Навигационное обеспечение международной космической станции» Сборник трудов X Санкт-Петербургской международной конференции по интегрированным навигационным системам 2003, стр. 7.
4. Патент на изобретение №2654321 Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников Авторы: М.В. Михайлов, С.Н. Рожков / Заявка №2016129647 / Приоритет изобретения 19 июля 2016 г.

Способ контроля готовности космонавта к выполнению полетных операций
Способ контроля производительности солнечной батареи космического аппарата с инерционными исполнительными органами
Способ определения производительности установленной на космическом аппарате солнечной батареи с положительной выходной мощностью тыльной поверхности
Способ управления снабженным солнечными батареями космическим аппаратом
Способ управления снабженным солнечными батареями космическим аппаратом
Электронасосный агрегат
Способ кодирования и декодирования блокового кода
Способ контроля лесного пожара с космического аппарата
Гидроразъем
Способ контроля лесного пожара с космического аппарата
Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников
Способ определения ориентации космического аппарата по сигналам навигационных спутников
Способ определения координат космического аппарата по сигналам навигационных спутников и устройство определения координат космического аппарата по сигналам навигационных спутников
Способ определения ориентации космического аппарата по сигналам навигационных спутников

