Результат интеллектуальной деятельности: Система сопровождения целей и ракет зенитной боевой машины
Вид РИД
Изобретение
Предлагаемое изобретение относится к области военной техники и может быть использовано в войсках противовоздушной обороны (ПВО) и в сухопутных войсках.
По мере развития средств воздушного нападения все более жесткие требования предъявляются к эффективности средств защиты от него. Помимо традиционных показателей эффективности сопровождения воздушных объектов, в число которых входят максимальные дальность и высота, среднеквадратические ошибки пеленгации, всепогодность, помехозащищенность, успех в исходе локального конфликта определяется в том числе и такими факторами, как мобильность носителя, способность одновременного отражения атак с нескольких направлений в процессе движения. Воздействие качки при движении вызывает необходимость принятия мер для обеспечения точности позиционирования антенного луча в процессе пеленгации целей. Наличие нескольких целей на сопровождении предъявляет повышенные требования к точности определения их координат и корректности проведения последующей процедуры пролонгации.
Известно моноимпульсное радиолокационное устройство сопровождения по направлению (патент РФ №2273863, МПК G01S 13/66) [1], установленное на подвижном носителе и функционально содержащее моноимпульсную антенну, двухканальное приемное устройство, датчик углового положения платформы, способной вращаться относительно носителя в горизонтальной плоскости, три датчика углового положения носителя и два датчика углового положения антенны, а также блок вычислителей и запоминающее устройство. Датчики углового положения носителя и соответствующие им вычислители позволяют измерить и учесть при расчете направления позиционирования антенного луча поворот системы координат платформы относительно земной системы координат. Датчики углового положения антенны, закрепленные на вертикальном и горизонтальном приводах, предназначены для измерения отклонения антенны от строительной оси платформы в соответствующих плоскостях. При этом механическое сканирование луча антенны приводит к невозможности быстрого переброса луча в широком диапазоне углов и вытекающей из этого неспособности многоканального сопровождения целей, что является основным недостатком изобретения.
Известен способ измерения координат цели мобильной радиолокационной станцией (РЛС) (Патент РФ №2410711, МПК G01S 13/02) [2], заключающийся в формировании углов качек основания РЛС в трех ортогональных плоскостях, на основе данных гироскопической системы измерения и коррекции с их использованием углов наклона оси диаграммы направленности фазированной антенной решетки (ФАР) РЛС обнаружения целей дециметрового диапазона длин волн. В блоке измерения координат РЛС обнаружения формируется радиолокационная отметка цели в стабилизированной системе координат с учетом углов качек и передается в центральную вычислительную систему (ЦВС), которая управляет с помощью следящей системы РЛС сопровождения сантиметрового диапазона, осуществляющей допоиск по углу места и захват цели на автосопровождение. Отклонение луча локатора сопровождения осуществляется электромеханическим способом: по углу места с помощью привода растровой головки, представляющей собой ротор из скрученных в улитку волноводов, способный перемещать луч со скоростью 360 град/с, по азимуту - с помощью азимутального привода, при этом система датчиков, механически связанная с антенной системой, фиксирует ее положение по углу места и азимуту. В ЦВС осуществляется комплексирование данных, поступивших с обоих локаторов. Устройство, работающее по данному способу, предназначено для сопровождения только одной цели вследствие малой скорости перемещения и инерционности блоков, обеспечивающих отклонение луча РЛС сопровождения.
Наиболее близкой по своей сущности к изобретению является радиолокационная система сопровождения целей и ракет, описанная в патенте РФ №2321818 от 10.04.2008 г. [3] и принятая авторами в качестве прототипа к предлагаемому изобретению.
Система сопровождения целей и ракет содержит башню боевой машины (БМ) с размещенными на ней пусковыми установками (ПУ) с приводами наведения, радиолокационной станцией обнаружения целей (СОЦ), радиолокационной станцией сопровождения целей и ракет (ССЦР), содержащей передатчик, приемопередающую основную антенну (OA) с фазированной антенной решеткой (ФАР OA) и системой управления лучом (СУЛ OA), приемник OA, приемную антенну ввода ракет (АВР) с ФАР АВР и СУЛ АВР, приемник АВР, блок выделения координат цели (БВКЦ), блок выделения координат ракеты (БВКР) АВР, блок выделения координат ракеты OA, планировщик канальных интервалов (КИ), синхронизатор-шифратор, и вычислительной системой, содержащей блок выдачи целеуказаний (ЦУ), блок формирования стартовых установок (БФСУ) ракетного луча OA, блок формирования стартовых установок (БФСУ) ракетного луча АВР, блок выработки команд управления (БВКУ), блок выработки углов отворота ПУ и башни, блок вычисления зонных параметров, буфер координат целей, буфер координат ракет OA, буфер координат ракет АВР, первый, второй и третий переключатели.
Описанная система обеспечивает одновременное сопровождение нескольких целей, осуществляя электрическое сканирование луча основной антенны в пределах ±45° в угломестной и азимутальной плоскостях. Пеленгация ракет на стартовом участке осуществляется АВР, имеющей широкий луч, с передачей впоследствии их на сопровождение основной антенне с узким лучом. Входящий в состав станции сопровождения целей и ракет планировщик КИ отвечает за согласованную работу всех блоков, реализуя жесткую временную циклограмму работы по целям и ракетам в рамках специальных временных слотов - канальных интервалов. Комплекс способен обеспечить применение зенитных управляемых ракет (ЗУР) с гиперзвуковыми скоростями, что снижает работное время на поражение цели и повышает выживаемость комплекса.
Недостатком изобретения является отсутствие принятия мер для компенсации наклона лучей приемопередающей РЛС сопровождения целей и ракет в процессе движения носителя. Угловая разрешающая способность станции, согласно утверждениям авторов изобретения, достигает десятых долей градуса. Угловое смещение оси антенного луча в результате качки, вызванной движением носителя, приведет к ошибкам позиционирования луча и, как следствие, работе на нелинейном участке пеленгационной характеристики и большим ошибкам пеленгов. При интенсивной качке возможен сценарий облучения цели боковым лепестком или попадания ее в направление интерференционного минимума диаграммы направленности антенны (ДНА), что означает потерю цели.
Также серьезным недостатком данного изобретения является пролонгация и выдача координат сопровождаемых объектов в антенной системе координат, ориентация которой относительно неподвижной земной системы меняется вследствие вращения башни. Прогнозирование координат цели на интервал между двумя соседними посылками импульсов на нее путем простой линейной экстраполяции ее угловых координат, полученных в процессе пеленгации, в условиях совершения целью маневра или наличия сложной групповой цели приведет к дополнительным ошибкам предсказания ее текущего положения. Все это в совокупности может привести к ошибкам наведения луча в очередном цикле зондирования и последующему срыву сопровождения.
Задачей предлагаемого изобретения является обеспечение возможности высокоточного многоканального сопровождения целей и ракет при работе системы в движении.
Поставленная задача достигается тем, что в систему сопровождения целей и ракет, содержащую башню боевой машины (БМ) с размещенными на ней пусковыми установками (ПУ) с приводами наведения, пультом пуска, радиолокационной станцией обнаружения целей (СОЦ), радиолокационной станцией сопровождения целей и ракет (ССЦР), содержащей передатчик, приемопередающую основную антенну (OA) с фазированной антенной решеткой (ФАР OA) и системой управления лучом (СУЛ OA), приемник OA, приемную антенну ввода ракет (АВР) с ФАР АВР и СУЛ АВР, приемник АВР, блок выделения координат цели (БВКЦ), блок выделения координат ракеты (БВКР) OA, блок выделения координат ракеты АВР, планировщик канальных интервалов (КИ), синхронизатор-шифратор, буфер координат целей, буфер координат ракет OA, буфер координат ракет АВР, буфер команд управления, первый, второй и третий переключатели, и вычислительной системой, содержащей блок выдачи целеуказаний (ЦУ), блок формирования стартовых установок (БФСУ) ракетного луча OA, блок формирования стартовых установок (БФСУ) ракетного луча АВР, блок выработки углов отворота ПУ и башни, блок вычисления зонных параметров и блок выработки команд управления (БВКУ), введены блок датчиков ориентации БМ, блок датчиков ориентации ССЦР, датчик скорости поворота башни с интегратором, в вычислительную систему введен первый блок вычисления углов качек, вход которого подключен к выходу блока датчиков ориентации БМ, а в ССЦР введены второй блок вычисления углов качек, вход которого подключен к выходу блока датчиков ориентации ССЦР, блок вычисления углов ориентации (БВУО) ССЦР, преобразователи координат цели (ПКЦ), координат ракеты в систему OA (ПКР OA) и координат ракеты в систему АВР (ПКР АВР), обратные преобразователи координат цели (ОПКЦ), координат ракеты из системы OA (ОПКР OA) и координат ракеты из системы АВР (ОПКР АВР), три сумматора, блоки сглаживания и экстраполяции координат цели (БСиЭКЦ), координат ракет от OA (БСиЭКР OA) и координат ракет от АВР (БСиЭКР АВР), причем первый вход БВУО подключен к выходу первого блока вычисления углов качек, также соединенному со вторыми входами БФСУ лучей АВР и OA, второй вход подключен к выходу второго блока вычисления углов качек, также соединенному с четвертым входом БВКУ, третий вход подключен к выходу датчика скорости поворота башни с интегратором, также соединенному с третьими входами БФСУ лучей АВР и OA, четвертый-пятый входы подключены к первому-второму выходам планировщика КИ, а выход соединен со вторыми входами ПКЦ, ПКР OA, ПКР АВР, ОПКЦ, ОПКР OA и ОПКР АВР, первые входы первого-третьего сумматоров соединены с координатными выходами соответственно БВКР АВР, БВКР OA и БВКЦ, вторые входы - с выходами третьего переключателя, первого переключателя и ПКЦ соответственно, а выходы - с координатными входами буфера координат ракет АВР, буфера координат ракет OA и буфера координат целей соответственно, причем выход третьего сумматора также подключен к первому входу ОПКЦ, выход которого соединен с первым входом БСиЭКЦ, второй вход которого подключен к первому выходу планировщика КИ, первый выход подключен к координатным входам БФСУ лучей АВР и OA, блока вычисления зонных параметров и блока выработки углов отворота ПУ и башни, а второй выход - ко второму входу второго переключателя, также вторые выходы буферов координат ракет АВР и OA соединены соответственно со вторым и третьим входами БВКУ, а их первые выходы подключены к первым входам соответственно ОПКР АВР и ОПКР OA, выходы которых подключены соответствующим образом к первым входам БСиЭКР АВР и БСиЭКР OA, вторые входы которых соединены со вторым выходом планировщика КИ, а выходы - с первыми входами соответственно ПКР АВР и ПКР OA, выходы которых подключены ко вторым входам третьего и первого переключателей соответственно, первый вход ПКЦ подключен к выходу второго переключателя, а выход также подключен к первому входу СУЛ OA.
При этом вторые выходы БФСУ лучей OA и АВР соединены со вторым и третьим входами буфера координат целей.
Также башня, блок ЦУ, БФСУ лучей АВР и OA, БВКУ, блок вычисления зонных параметров и блок выработки углов отворота ПУ и башни имеют синхровходы, соединенные со вторым синхровыходом синхронизатора-шифратора. СУЛ OA, СУЛ АВР и передатчик имеют синхровходы, соединенные с третьим-пятым синхровыходами синхронизатора-шифратора соответственно, а приемник OA и приемник АВР имеют синхровходы, подключенные к шестому синхровыходу синхронизатора-шифратора, БВКР АВР и БВКР OA имеют синхровходы, подключенные к седьмому синхровыходу синхронизатора-шифратора, а БВКЦ имеет синхровход, соединенный с восьмым синхровыходом синхронизатора-шифратора.
Кроме того, БСиЭКЦ, буферы координат целей, координат ракет OA и ракет АВР имеют синхровходы, соединенные с девятым синхровыходом синхронизатора-шифратора.
Сущность изобретения заключается в том, что для повышения точности нацеливания лучей ССЦР при сопровождении целей и ракет в систему введены устройства измерения углов ориентации вследствие качки и движения башни нестабилизированных систем координат, связанных с боевой машиной и с башней, относительно стабилизированной неподвижной и вычислительные элементы для учета измеренных углов при расчете координат установки антенных лучей и при определении положения целей и ракет на основе принятых отраженных сигналов.
В качестве устройств измерения углов поворота введены два блока датчиков ориентации и датчик скорости поворота башни. Первый блок датчиков ориентации установлен в корпусе боевой машины в невращающемся отсеке, второй установлен в корпусе ССЦР, размещенном на башне. Функционально блоки идентичны, но различаются по конструктивным и точностным характеристикам. Блок датчиков ориентации БМ обладает существенными массогабаритными характеристиками и обеспечивает высокую точность измерений, временную стабильность характеристик, устойчивость функционирования в условиях вибрации. Данные с его выхода поступают в первый блок вычисления углов качек. Блок датчиков ориентации ССЦР обладает меньшими габаритами, которые не позволяют достичь таких же показателей точности и стабильности результатов измерения. Информация с его выхода поступает на вход второго блока вычисления углов качек. Наличие блока датчиков ориентации ССЦР позволяет ее блокам получать информацию с существенно большим временным разрешением и без задержки.
Каждый из блоков датчиков ориентации содержит трехосевой датчик угловых скоростей и трехосевой акселерометр, Датчики угловых скоростей позволяют получить угловые скорости поворота носителя в трех ортогональных плоскостях  по курсовому углу, тангажу и крену. Акселерометры измеряют линейные проекции кажущегося ускорения на оси локальной прямоугольной системы координат, связанной с блоком датчиков. Необходимость одновременного наличия датчиков угловых скоростей и акселерометров продиктована присутствием шумов и погрешностей в данных их измерений. Реальные датчики угловой скорости характеризуются смещением «нуля», то есть значением угловой скорости, выдаваемой в состоянии покоя. Основной причиной является температурная нестабильность характеристик датчиков. При интегрировании их показаний достаточно быстро накапливается ошибка определения ориентации. В качестве одного из методов борьбы используют калибровку. Данный метод хорош в лабораторных условиях, но в условиях боевой работы калибровка не всегда представляется возможной и уместной. Основной проблемой, связанной с акселерометрами, является существенный уровень шумов в получаемых измерениях. Кроме того, оценка ориентации, получаемая только из данных акселерометров, содержит неопределенность относительно угла поворота вокруг оси, параллельной вектору гравитации. Поэтому для получения истинной угловой ориентации системы координат датчиков используется объединяющий фильтр. Такие фильтры реализованы в первом и втором блоках вычисления углов качек.
по курсовому углу, тангажу и крену. Акселерометры измеряют линейные проекции кажущегося ускорения на оси локальной прямоугольной системы координат, связанной с блоком датчиков. Необходимость одновременного наличия датчиков угловых скоростей и акселерометров продиктована присутствием шумов и погрешностей в данных их измерений. Реальные датчики угловой скорости характеризуются смещением «нуля», то есть значением угловой скорости, выдаваемой в состоянии покоя. Основной причиной является температурная нестабильность характеристик датчиков. При интегрировании их показаний достаточно быстро накапливается ошибка определения ориентации. В качестве одного из методов борьбы используют калибровку. Данный метод хорош в лабораторных условиях, но в условиях боевой работы калибровка не всегда представляется возможной и уместной. Основной проблемой, связанной с акселерометрами, является существенный уровень шумов в получаемых измерениях. Кроме того, оценка ориентации, получаемая только из данных акселерометров, содержит неопределенность относительно угла поворота вокруг оси, параллельной вектору гравитации. Поэтому для получения истинной угловой ориентации системы координат датчиков используется объединяющий фильтр. Такие фильтры реализованы в первом и втором блоках вычисления углов качек.
Объединение данных с блоков датчиков ориентации БМ и ССЦР и датчика скорости поворота башни выполняется в блоке вычисления углов ориентации ССЦР. В результате вырабатывается единая оценка ориентации ССЦР относительно неподвижной системы координат.
В качестве вычислительных средств, осуществляющих компенсацию рассогласования стабилизированной и нестабилизированных систем координат, в контурах сопровождения введены преобразователи координат целей и координат ракет в системы OA и АВР, выполняющие переход от стабилизированных координат к нестабилизированным, пригодным для выдачи их в СУЛ, и соответствующие им обратные преобразователи, получающие координаты в связанных с антеннами системах и переводящие их в стабилизированные. Введенные в дополнение к этому блоки сглаживания и экстраполяции координат ракет, полученных от OA и АВР, и блок сглаживания и экстраполяции координат целей осуществляют пролонгацию линейных декартовых стабилизированных координат, в отличие от пролонгаторов, работавших в прототипе с угловыми нестабилизированными координатами. Это позволило увеличить достоверность прогнозирования положения объектов и повысить точность наведения при сопровождении.
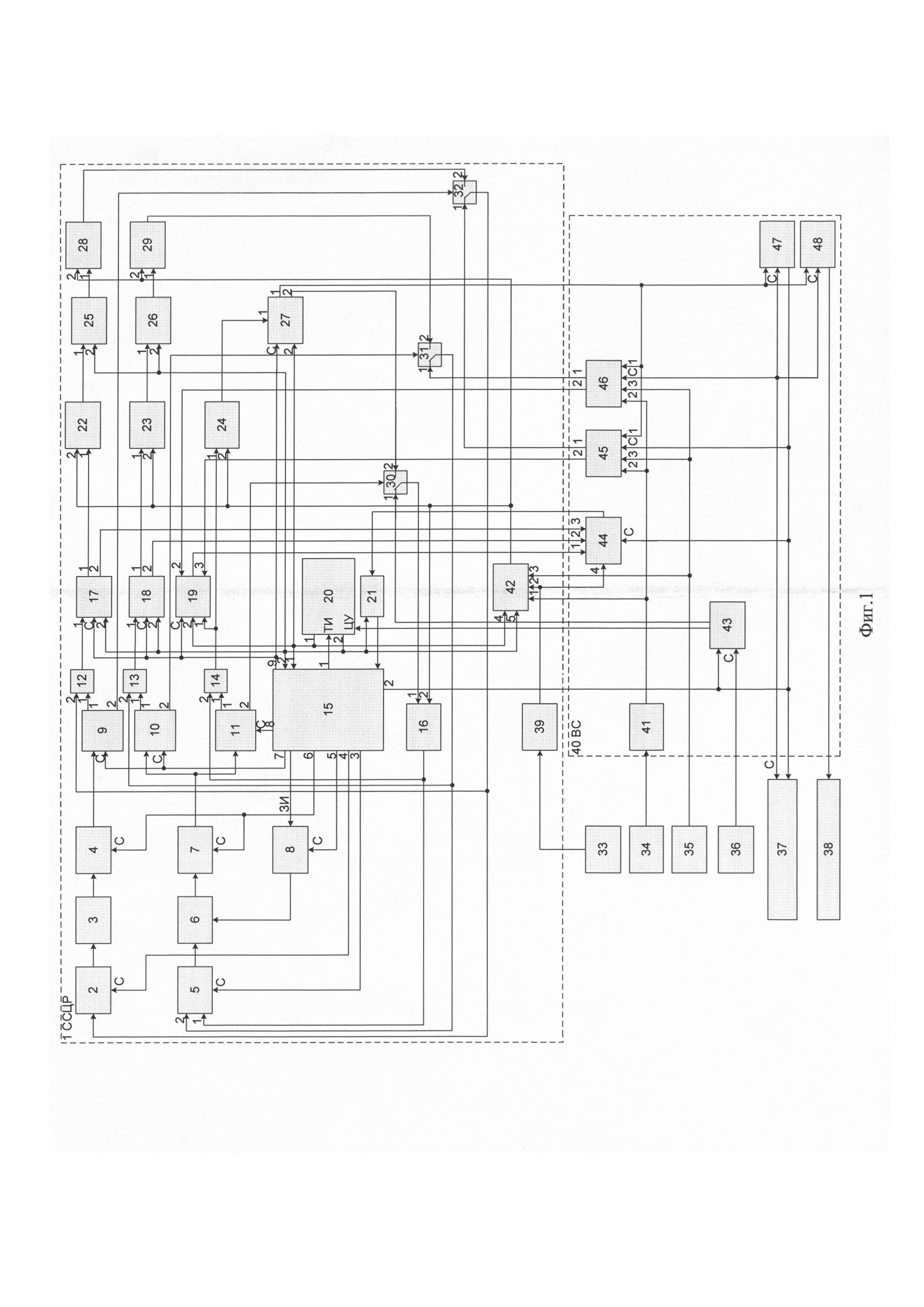
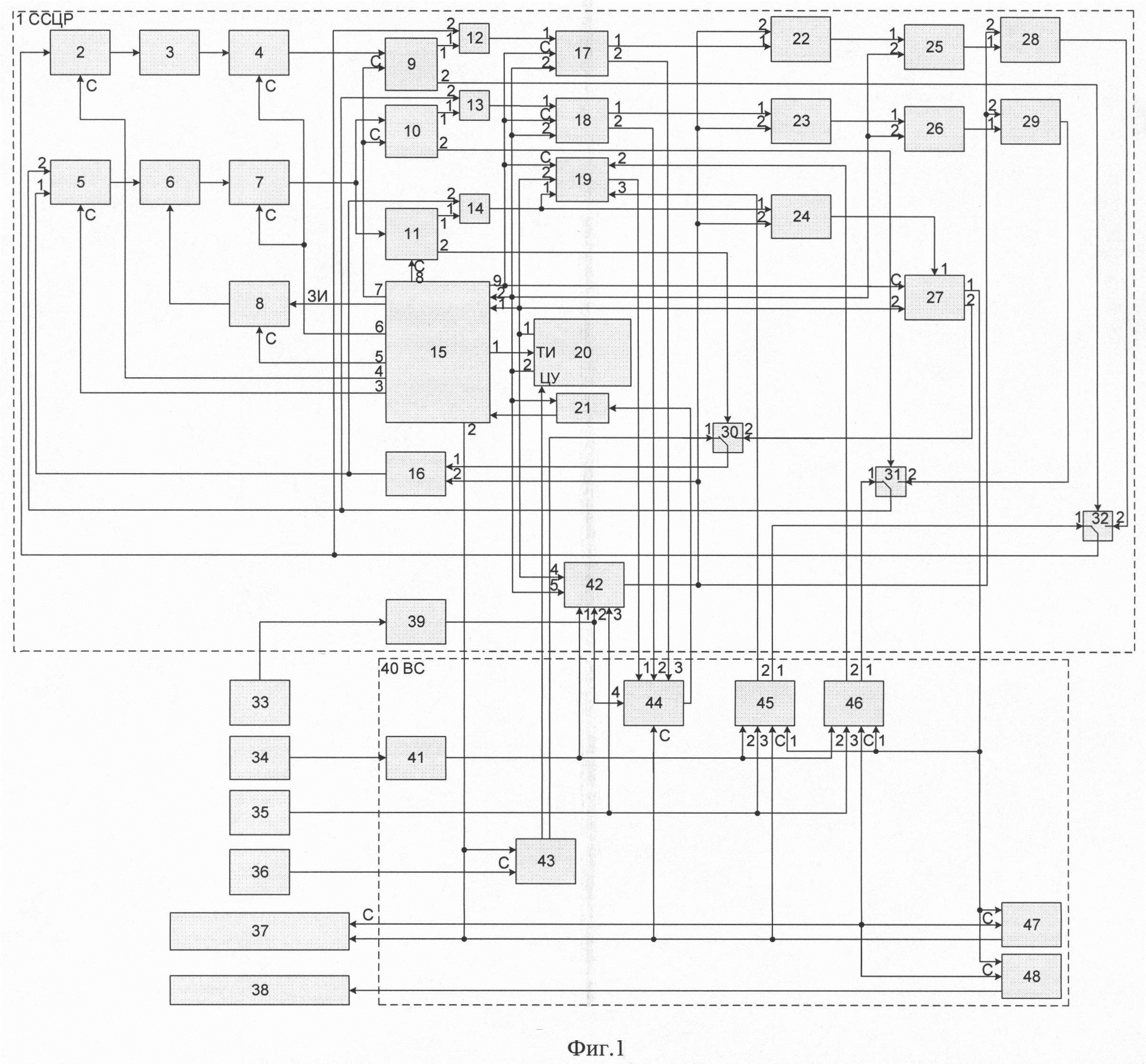
Изобретение поясняется графическим материалом, где на фиг. 1 изображена функциональная схема предлагаемой системы сопровождения целей и ракет; на фиг. 2 - используемые в заявленном устройстве системы координат. На фиг. 1 приняты следующие обозначения:
1 - станция сопровождения целей и ракет (ССЦР);
2 - система управления лучом антенны ввода ракет (СУЛ АВР);
3 - фазированная антенная решетка антенны ввода ракет (ФАР АВР);
4 - приемник АВР;
5 - система управления лучом основной антенны (СУЛ OA);
6 - фазированная антенная решетка основной антенны (ФАР OA);
7 - приемник OA;
8 - передатчик;
9 - блок выделения координат ракеты, полученных от АВР (БВКР АВР);
10 - блок выделения координат ракеты, полученных от OA (БВКР OA);
11 - блок выделения координат цели (БВКЦ);
12 - первый сумматор;
13 - второй сумматор;
14 - третий сумматор;
15 - синхронизатор-шифратор;
16 - преобразователь координат цели (ПКЦ);
17 - буфер координат ракет АВР;
18 - буфер координат ракет OA;
19 - буфер координат целей;
20 - планировщик канальных интервалов (КИ);
21 - буфер команд управления;
22 - обратный преобразователь координат ракеты из системы АВР (ОПКР АВР);
23 - обратный преобразователь координат ракеты из системы OA (ОПКР OA);
24 - обратный преобразователь координат цели (ОПКЦ);
25 - блок сглаживания и экстраполяции координат ракет, полученных от АВР (БСиЭКР АВР);
26 - блок сглаживания и экстраполяции координат ракет, полученных от OA (БСиЭКР OA);
27 - блок сглаживания и экстраполяции координат целей (БСиЭКЦ);
28 - преобразователь координат ракеты в систему OA (ПКР OA);
29 - преобразователь координат ракеты в систему АВР (ПКР АВР);
30 - второй переключатель;
31 - первый переключатель;
32 - третий переключатель;
33 - блок датчиков ориентации станции сопровождения целей и ракет;
34 - блок датчиков ориентации боевой машины;
35 - датчик скорости поворота башни с интегратором;
36 - радиолокационная станция обнаружения целей (СОЦ);
37 - башня и пусковые установки (ПУ) с приводами наведения;
38 - пульт пуска;
39 - второй блок вычисления углов качек;
40 - вычислительная система (ВС);
41 - первый блок вычисления углов качек;
42 - блок вычисления углов ориентации (БВУО) ССЦР;
43 - блок выработки целеуказаний (ЦУ);
44 - блок выработки команд управления (БВКУ);
45 - блок формирования стартовых установок (БФСУ) лучей АВР;
46 - блок формирования стартовых установок (БФСУ) строба OA;
47 - блок выработки углов отворота ПУ и башни;
48 - блок вычисления зонных параметров.
Башня, пусковые установки с приводами наведения, пульт пуска, радиолокационная станция обнаружения целей, передатчик, ФАР OA и АВР с соответствующими им СУЛ и приемниками, блок ЦУ, блок выработки углов отворота башни и пусковых установок, блок вычисления зонных параметров, блоки выделения координат ракеты в системах АВР и OA, блок выделения координат цели являются известными системами и выполнены на тех же принципах, что и аналогичные блоки в патенте №2321818.
Блоки датчиков ориентации БМ (34) и ССЦР (33) представляют собой бесплатформенные инерциальные измерительные системы, каждая из которых содержит трехосевой датчик угловых скоростей и трехосевой акселерометр. В качестве чувствительных элементов первого блока датчиков могут быть применены высокоточные лазерные или волоконно-оптические датчики угловых скоростей, маятниковые компенсационные акселерометры. Второй блок может быть выполнен на основе микромеханических датчиков. Примеры выполнения таких датчиков и измерительных систем на их основе приведены в [4].
Датчик скорости поворота башни с интегратором (35) представляет собой тахометрический элемент для измерения угловой скорости вращения башни, выполненный, например, на основе тахогенератора с фильтрующими контурами, и позволяет определить угол отворота башни и экстраполировать его на интервал, соответствующий задержке передачи данных. Примеры таких датчиков приведены в [5].
Первый (41) и второй (39) блоки вычисления углов качек являются цифровыми программными элементами, на входы которых поступают данные с выходов блоков датчиков ориентации (34) и (33) соответственно. Задачей этих блоков является комплексирование показаний датчиков угловых скоростей и акселерометров, входящих в состав блоков (34) и (33), с целью нахождения углов ориентации локальной системы координат блока датчиков относительно глобальной неподвижной и их первых производных. Алгоритмы решения данной задачи хорошо известны и описаны, например, в [6].
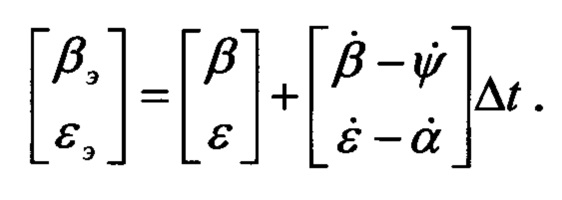
Блок вычисления углов ориентации ССЦР (42) выполняет объединение данных, поступивших с первого и второго блоков вычисления углов качек с учетом информации от датчика скорости поворота башни, и упреждение их к середине требуемого канального интервала. Объединение осуществляется в соответствии с формулой:

 - угловые скорости вращения по курсу, тангажу и крену соответственно,
- угловые скорости вращения по курсу, тангажу и крену соответственно,
 - вектор состояния, упрежденный к середине требуемого канального интервала,
- вектор состояния, упрежденный к середине требуемого канального интервала,
xk - скорректированный прогноз (оценка) вектора на текущем интервале,
xk-1 - оценка вектора состояния на предыдущем интервале,
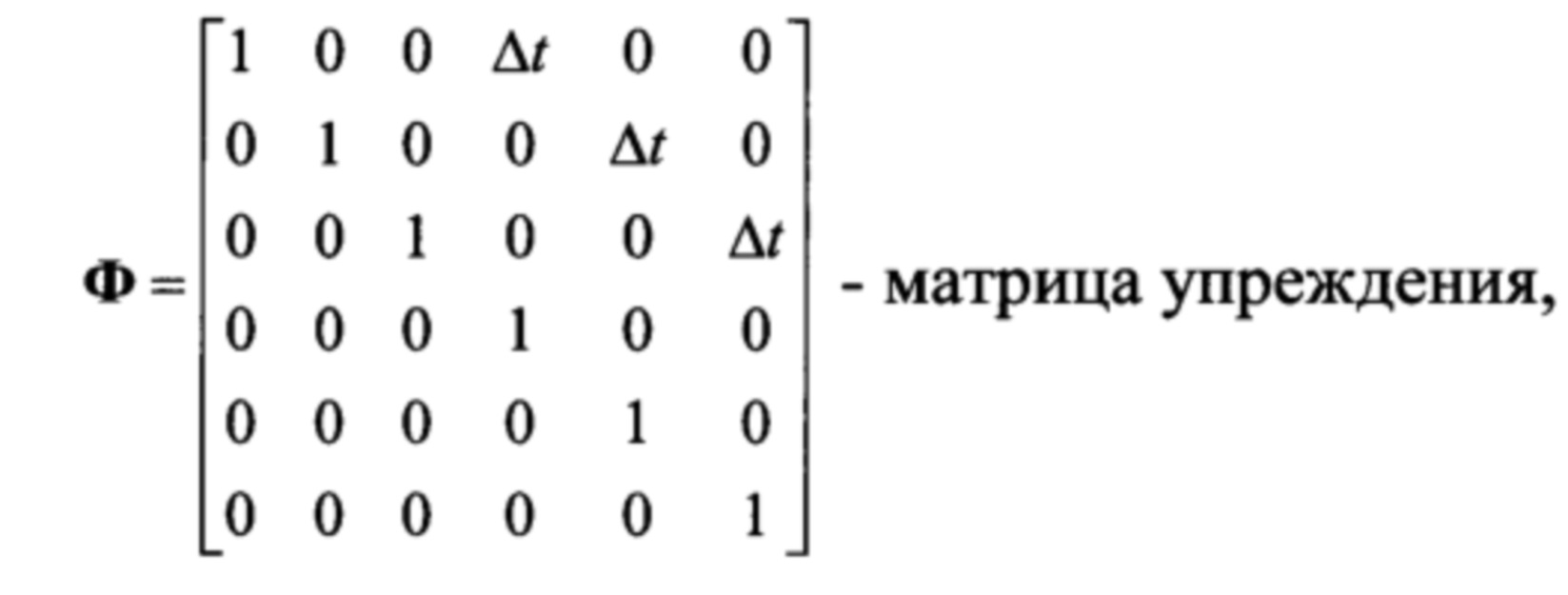
Δt - временной интервал упреждения, соответствующий промежутку с момента последнего получения данных измерения до середины импульсной посылки,
 - суммарные экстраполированные данные с первого блока вычисления углов качек и интегратора показаний датчика скорости поворота башни,
- суммарные экстраполированные данные с первого блока вычисления углов качек и интегратора показаний датчика скорости поворота башни,


 - экстраполированные данные со второго блока вычисления углов качек,
- экстраполированные данные со второго блока вычисления углов качек,

Δt1, Δt2 - временные интервалы, прошедшие с моментов выполнения вычислений первым и вторым блоками вычисления углов качек соответственно,

 - коэффициенты усиления,
- коэффициенты усиления,
 - упрежденная на интервал Δt ковариационная матрица,
- упрежденная на интервал Δt ковариационная матрица,
 - скорректированная ковариационная матрица,
- скорректированная ковариационная матрица,
I - единичная матрица,
Q - ковариация шума процесса,
R1, R2 - ковариации шумов измерений первого и второго блоков датчиков соответственно.
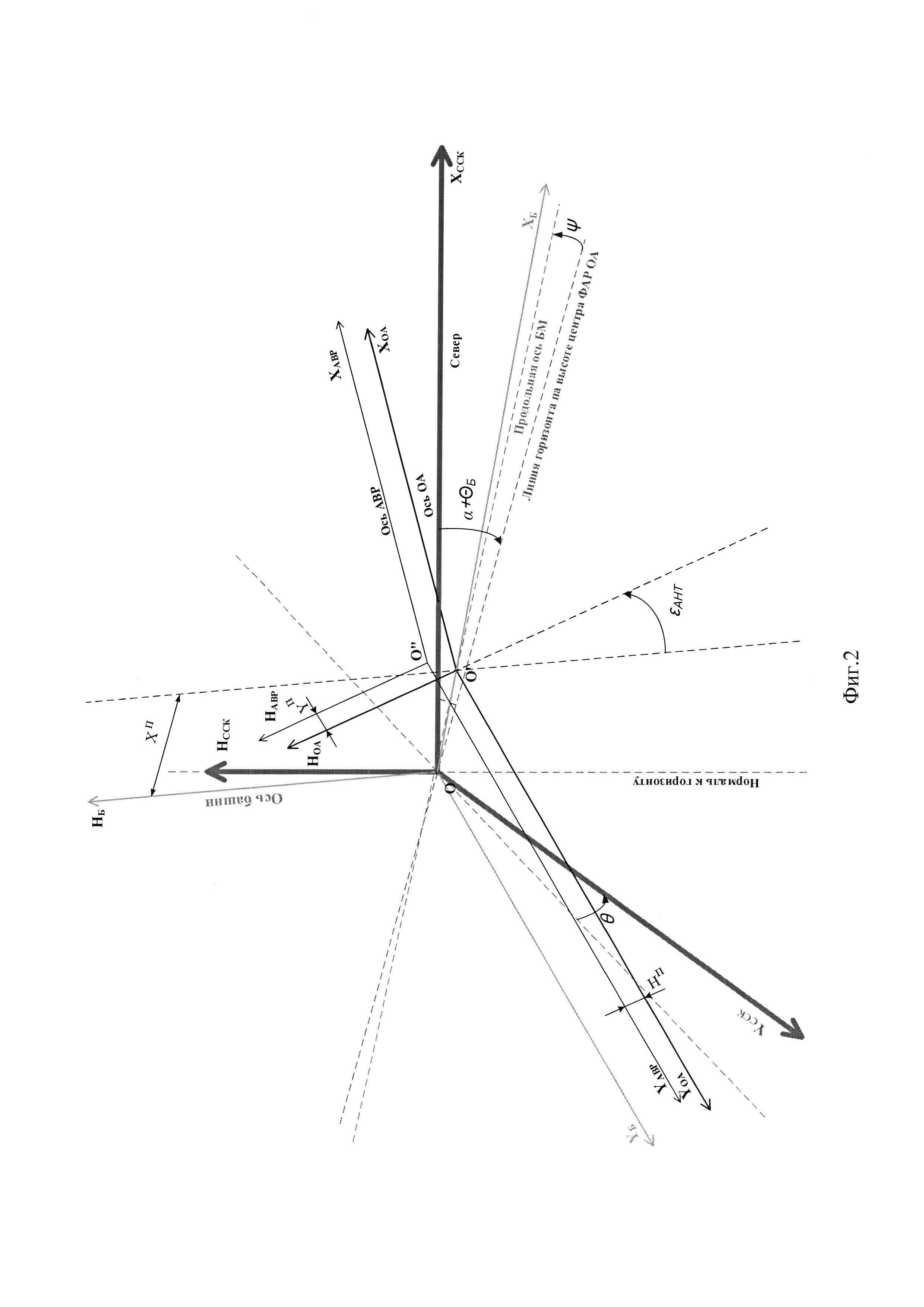
На фиг. 2 изображены следующие используемые в вычислениях в предлагаемом устройстве системы координат:
OXССКYССКHССК - стабилизированная система координат, ось ОХССК которой совпадает с направлением «Север», а центр находится на оси вращения башни на высоте геометрического центра ФАР OA;
OXБYБHБ - нестабилизированная система координат башни, повернутая относительно стабилизированной OXССКYССКHССК на углы αΣ=α+ΘБ, ψ, θ, где α - угол курса (угол поворота вокруг оси ОНССК, перпендикулярной плоскости горизонта), ψ - угол тангажа (угол поворота вокруг OYССК), θ - угол крена (угол поворота вокруг направления на север ОХССК), ΘБ - угол отворота башни;
О'XOAYOAHOA - нестабилизированная пеленгационная система координат OA, центр которой О' смещен относительно центра системы координат башни вдоль оси ОХБ на значение параллакса ХП, повернутая вокруг оси OYБ на угол наклона к плоскости башни антенного полотна ФАР OA εАНТ;
О''XАВРYАВРHАВР - нестабилизированная пеленгационная система координат АВР, центр которой О'' смещен относительно центра системы координат башни О на значения параллаксов ХП, YП, НП, повернутая вокруг оси ОYБ на угол наклона антенного полотна εАНТ.
Переход от стабилизированной системы координат к системе координат башни выполняется путем последовательного применения 3 операторов поворота вокруг осей OHCCК, OXCCК, OYCCК:

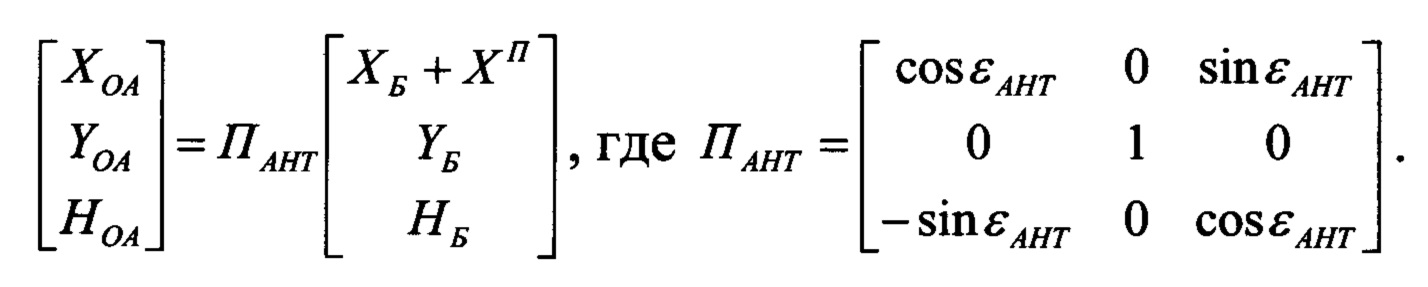
Переход от системы координат башни к системе координат OA предусматривает операции переноса и поворота координат:
Переход от системы координат башни к системе координат АВР выполняется следующим образом:

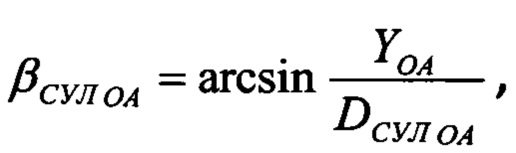
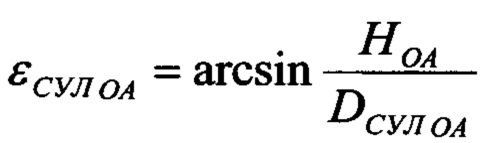
Прямоугольной нестабилизированной системе координат OA соответствует биконическая система координат СУЛ OA, переход к которой выполняется следующим образом:

и аналогично для АВР:



Преобразователь координат цели (16) и преобразователь координат ракеты в систему OA (29) представляют собой вычислительные блоки, предназначенные для преобразования прогнозных координат объекта в стабилизированной прямоугольной системе координат в задание для СУЛ OA. При получении прогнозных координат цели/ракеты на первый вход и углов ориентации с выхода блока вычисления углов ориентации ССЦР (42) на второй они выполняют над координатами цели/ракеты следующие операции:
1) переход от прямоугольной стабилизированной системы координат к системе координат башни;
2) переход от системы координат башни к прямоугольной системе координат OA;
3) переход от прямоугольной системы OA к биконической системе СУЛ OA.
Полученные в результате выполнения вычислений данные с выходов поступают в СУЛ OA (5) и на вторые входы третьего (14) и второго (13) сумматоров соответственно. Значения углов βСУЛОА, εСУЛОА являются заданием для СУЛ OA на формирование фазового распределения излучателей апертуры OA, необходимого для отклонения луча в требуемом направлении. Оценочные дальности DСУЛОА используются только сумматорами и игнорируются СУЛ OA.
Преобразователь координат ракеты в систему АВР (26) предназначен для преобразования прогнозных стабилизированных прямоугольных координат ракеты, подаваемых на первый вход, в задание для СУЛ АВР (2), для чего на второй вход преобразователя подаются углы ориентации с выхода блока вычисления углов ориентации ССЦР. Блок выполняет следующие операции над координатами ракеты:
1) переход от прямоугольной стабилизированной к системе координат башни;
2) переход от системы координат башни к системе координат АВР;
3) переход от прямоугольной системы координат АВР к биконической системе СУЛ АВР.
Результаты с выхода выдаются через третий переключатель в СУЛ АВР (2) и на второй вход первого сумматора (12).
Блоки выделения координат ракеты в системах АВР и OA (9-10) и блок выделения координат цели (11) своими первыми выходами соединены с первыми входами первого-третьего сумматоров, а вторыми выходами - с управляющими входами соответственно третьего, первого и второго переключателей. В случае успешного выделения координат в соответствующем блоке на второй выход выдается логический сигнал автосопровождения, а на первый выход поступают первичные измеренные координаты: дальность Dизм и угловые отклонения δβ и δε от оси луча соответствующей антенны.
Первый-третий сумматоры (12-14) предназначены для вычисления полных биконических координат ракеты в системе АВР, ракеты в системе OA и цели соответственно. На первый вход каждого из сумматоров от блока выделения координат соответствующего объекта (9-11) поступают его первичные измеренные координаты: дальность Dизм и угловые отклонения δβ и δε от оси луча соответствующей антенны, на второй вход - сформированные перед началом излучения прогнозные биконические координаты с выхода соответствующего преобразователя координат (28), (29), (16). Учитывая, что максимальная однозначно определяемая при импульсно-доплеровском методе измерения дальность Dодн прямо пропорционально зависит от периода следования импульсов, облучающих цель, реально измеряемая дальность Dизм до цели, находящейся на расстоянии Dист>Dодн от локатора, представляет собой остаток от деления Dист на Dодн [7]. Поэтому истинная дальность до объекта в каждом из сумматоров вычисляется следующим образом: 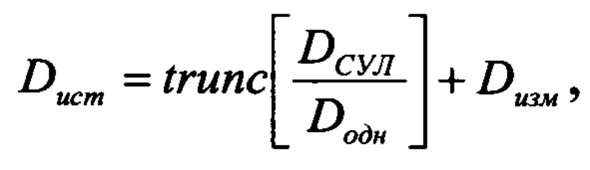 где trunc [] - целая часть. Полные угловые координаты определяются путем суммирования выделенных в БВК отклонений относительно антенного луча и задания для СУЛ: β=δβ+βСУЛ, ε=δε+εСУЛ. Результаты с выходов сумматоров записываются в буферы координат ракет в системе АВР (17), ракет в системе OA (18) и целей (19) соответственно.
где trunc [] - целая часть. Полные угловые координаты определяются путем суммирования выделенных в БВК отклонений относительно антенного луча и задания для СУЛ: β=δβ+βСУЛ, ε=δε+εСУЛ. Результаты с выходов сумматоров записываются в буферы координат ракет в системе АВР (17), ракет в системе OA (18) и целей (19) соответственно.
Буферы координат ракет (17-18) представляют собой запоминающие устройства, предназначенные для хранения и выдачи по командам нестабилизированных координат ракет. Данные хранятся в виде массивов, в каждом из которых номеру ракеты поставлены в соответствие ее координаты, полученные с выходов сумматоров (12-13). Номер ракеты назначается планировщиком КИ, его очередное поступление на второй вход буфера означает сигнал к выдаче записанных координат конкретной ЗУР на первый вход соответствующего обратного преобразователя координат (22-23). При поступлении на синхровход команды от синхронизатора-шифратора происходит пакетная передача данных в блок выработки команд управления (44).
Буфер координат целей (19) представляет собой запоминающее устройство, предназначенное для хранения и выдачи по командам нестабилизированных координат сопровождаемых целей. При поступлении на его синхровход команды от синхронизатора-шифратора происходит синхронная с буферами координат ракет (17-18) передача данных в блок выработки команд управления (44) для тех целей, по которым пущены данные ракеты, по номерам, выданным блоками формирования стартовых установок (45-46).
Обратные преобразователи координат цели (24) и ракеты в системе OA (23) представляют собой вычислительные блоки, выполняющие следующие операции над полученными координатами:
1) переход от биконической системы СУЛ OA к прямоугольной системе координат OA;
2) переход от системы OA к системе координат башни;
3) переход от системы координат башни к прямоугольной стабилизированной системе координат.
Обратный преобразователь координат ракеты в системе АВР (22) выполняет следующие операции над полученными координатами:
1) переход от биконической системы СУЛ АВР к прямоугольной системе координат АВР;
2) переход от системы АВР к системе координат башни;
3) переход от системы координат башни к прямоугольной стабилизированной системе координат.
Синхронизатор-шифратор (15) и планировщик КИ (20) представляют собой цифровые программные устройства, отвечающие за согласованную работу всех блоков комплекса. Они реализованы по тем же принципам и на той же элементной базе, что и в прототипе. Планировщик КИ, выделяя канальные интервалы для работы по целям и ракетам и формируя задания, инициирует запуск циклов автосопровождения. Синхронизатор-шифратор, помимо формирования зондирующих импульсных посылок, обеспечивает привязку работы блоков системы к определенным временным слотам внутри базовых канальных интервалов с помощью синхроимпульсов, выдаваемых со второго-девятого синхровыходов.
Блок сглаживания и экстраполяции координат целей (27) предназначен для коррекции предыдущего прогноза положения цели в стабилизированной прямоугольной системе координат, выработанного перед началом работы по ней, на основании ее фактически измеренного положения, полученного по окончании цикла работы, путем вычисления их взвешенной суммы и пролонгации скорректированной оценки на временной интервал, прошедший с момента последней работы. Временной интервал рассчитывается по разнице номеров текущего и предыдущего выделявшегося для нее канальных интервалов с учетом фиксированной длительности базового тактового интервала. Коэффициенты взвешивания выбираются из соображений минимизации ошибки прогнозирования. Методика выполнения данных операций хорошо известна и описана, например, в [8]. Блок также выполняет роль буфера, то есть хранит стабилизированные координаты целей. По сигналу от синхронизатора-шифратора с первого выхода блока данные уходят в блок выработки углов отворота ПУ и башни, блок вычисления зонных параметров, БФСУ лучей OA и АВР. При получении команды от планировщика КИ по номеру цели происходит выборка ее координат на второй выход и передача через второй переключатель в ПКЦ.
Блоки сглаживания и экстраполяции координат ракет, полученных от АВР (25) и OA (26), осуществляют пролонгацию прямоугольных стабилизированных координат, приходящих на их координатные входы, на временной интервал, прошедший с момента последней работы по данной ракете, и их хранение. Выдача данных в ПКР АВР и ПКР OA осуществляется по команде с планировщика КИ.
Блоки формирования стартовых установок лучей АВР (45) и OA (46) представляют собой вычислительные блоки для вычисления по приходящим из ССЦР стабилизированным координатам целей прогнозных угловых нестабилизированных координат ракетных лучей антенн с целью успешного захвата на сопровождение пущенной по соответствующей цели ЗУР. Блоки выполнены на тех же я принципах, что и аналогичные в патенте №2321818, но дополнительно выполняют операции перехода из стабилизированной прямоугольной системы координат в биконические системы АВР и OA соответственно.
Блок выработки команд управления (44) является вычислительным устройством, предназначенным для формирования по полученным нестабилизированным измеренным координатам цели и ракеты команд для передачи на последнюю. При этом угловое положение цели линейно экстраполируется к середине ракетного канального интервала с использованием угловых скоростей качек, измеренных блоком датчиков ориентации ССЦР и скорректированных во втором блоке вычисления углов качек:
В целом работа по предлагаемому изобретению осуществляется следующим образом. Получив координаты обнаруженных целей от СОЦ (36), блок ЦУ (43) вырабатывает логический сигнал «ЦУ» и выдает его с первого выходада на первый вход планировщика КИ (20), одновременно передавая координаты цели на первый вход второго переключателя, с выхода которого они далее поступают на первый вход ПКЦ. Планировщик КИ выделяет свободный канальный интервал для отработки данного целеуказания и выдает команду на первый выход. При поступлении данной команды на первый вход синхронизатора-шифратора (15) происходит формирование импульсной посылки, а в БВУО ССЦР - упреждение к середине импульсной посылки углов ориентации носителя, передаваемых затем на вторые входы ПКЦ (16) и ОПКЦ (24). ПКЦ выполняет перевод полученных координат в систему координат СУЛ OA и выдает задание на установку антенного луча. Синхронизатор-шифратор формирует импульсную посылку, поступающую на вход передатчика (8). По синхроимпульсу с синхронизатора-шифратора в передатчике формируется радиосигнал требуемой мощности и поступает в ФАР OA (6), формируя амплитудное распределение поля на апертуре решетки. Одновременно СУЛ OA (5) в соответствии с пришедшим от ПКЦ заданием вырабатывает токи, обеспечивающие установку на фазовращателях излучающих элементов OA значений фаз, необходимых для отклонения луча в требуемом азимутально-угломестном направлении. В соответствии со сформированным на раскрыве амплитудно-фазовым распределением решеткой излучается электромагнитная волна, максимум интенсивности которой в дальней зоне соответствует требуемым угловым координатам. В случае нахождения цели на данном направлении она будет облучена главным лепестком диаграммы направленности антенны, в противном произойдет ее облучение боковым лепестком. Отраженная волна принимается основной антенной и формирует на ее выходе три сигнала: суммарный, разностно-угломестный и разностно-азимутальный, поступающие на вход приемника OA (7) и далее в БВКЦ (11), выполняющий обнаружение полезного сигнала на фоне шумов, после чего принимается решение о наличии цели в зондируемом направлении. В случае положительного решения на втором выходе БВКЦ вырабатывается флаг разрешения автоматического сопровождения цели (АСЦ), подключающий выход второго переключателя (30) ко второму входу, а с первого выхода БВКЦ на первый вход третьего сумматора (14) поступают выделенные первичные координаты цели. Сумматор вычисляет полные биконические координаты с учетом углов установки луча и оценочной дальности, поступивших на второй вход с выхода ПКЦ (16), и передает результаты в буфер координат целей (19) и на первый вход ОПКЦ (24). С использованием информации от БВУО (42), присутствующей на втором входе ОПКЦ, вычисляются стабилизированные координаты цели и передаются в БСиЭКЦ для сглаживания, экстраполяции и хранения.
При выделении очередного канального интервала для данной цели в соответствии с выданной планировщиком КИ командой из БСиЭКЦ на второй выход выбираются прогнозные координаты, соответствующие этой цели. Поступая в ПКЦ, они преобразуются в биконическую систему координат СУЛ OA с использованием упрежденных углов ориентации от БВУО ССЦР. Аналогично происходят прямое преобразование координат, излучение и прием сигнала, выделение координат, обратное преобразование координат. Результаты поступают в буфер координат целей (19) и БСиЭКЦ (27).
При поступлении с девятого синхровыхода синхронизатора-шифратора сигнала на выдачу информации БСиЭКЦ передает сглаженные стабилизированные координаты целей в блок выработки углов отворота ПУ и башни (47), блок вычисления зонных параметров (48), БФСУ луча АВР (45) и БФСУ луча OA (46).
Блок выработки углов отворота ПУ и башни вычисляет утлы упреждения, на которые необходимо отвернуть башню и ПУ при стрельбе по цели, и выдает их на входы приводов наведения. Блок вычисления зонных параметров определяет время до входа цели в зону поражения и время нахождения цели в ней и принимает решение о возможности ее обстрела. Если цель находится в зоне атаки, выдается команда на пульт пуска ЗУР (14).
БФСУ луча АВР и БФСУ луча OA на основе полученной координатной информации по цели и баллистической функции ракеты, хранящейся в памяти, прогнозируют координаты установки ракетных лучей для обеспечения захвата ракеты ЗУР, пущенной по данной цели. При этом происходит переход от стабилизированных целевых координат, полученных из БСиЭКЦ, к нестабилизированным биконическим с привлечением информации о качках и данных датчика поворота башни. С первых выходов БФСУ по сигналу с синхронизатора-шифратора установки через третий и первый переключатели поступают в СУЛ АВР (2) и СУЛ OA (5) соответственно, причем в первую с целью формирования требуемой диаграммы направленности на прием, а во вторую - на передачу и прием.
На начальном участке траектории ракеты узкий луч ФАР OA, как правило, облучает ее только полем своих боковых лепестков, поэтому успешное выделение координат в БВКР OA не гарантировано. Принятый широким лучом АВР отраженный сигнал проходит обработку в БВКР АВР, на втором выходе которого в случае успешного обнаружения возникает сигнал разрешения автосопровождения ракеты (АСР) АВР, а с первого выхода БВКР АВР дальность и угловые отклонения положения ракеты от центра луча АВР поступают на первый вход первого сумматора. Первый сумматор вычисляет полные координаты ракеты в биконической системе СУЛ АВР, записываемые в буфер координат ракет АВР (17).
БФСУ OA продолжает прогнозирование координат ракеты в соответствии с заложенным в нем алгоритмом наведения, скоростью ЗУР и координатной информацией по цели, приходящей от ССЦР. По мере того, как ракетная координата совмещается с целевой, БВКР OA начинает вырабатывать результаты обнаружения ЗУР лучом ФАР OA и сигнал разрешения АСР OA. В результате на управляющий вход первого переключателя выдается логический сигнал, подключающий его выход ко второму входу.
БВКУ, получающий на входы нестабилизированные координаты ракеты и цели, по которой осуществлялся пуск, запускает процесс формирования команд управления для ЗУР на основе разностных координат ракета-цель. С выхода БВКУ команда поступает в буфер команд управления (21), откуда по команде с планировщика КИ выбирается на вход синхронизатора-шифратора, формирующего запросную посылку. Далее посылка поступает на вход передатчика и передается лучом ФАР OA на соответствующую ЗУР. Ракета после приема команды управления осуществляет корректировку своего полета в соответствии с заложенной в ее аппаратуре программой наведения на цель.
Таким образом, предлагаемое изобретение позволяет обеспечить возможность высокоточного многоканального сопровождения целей и ракет при работе системы в движении.
Введение в систему двух блоков датчиков ориентации и блока объединения результатов их измерений позволило получить информацию об угловом положении пеленгационных систем координат относительно неподвижной земной поверхности с высокой степенью точности и высоким временным разрешением.
Применение преобразователей координат целей и ракет из стабилизированной относительно направления на север и плоскости горизонта системы в нестабилизированные, в которых осуществляется пеленгация целей и ракет, и обратно позволило повысить точность позиционирования антенного луча при наведении и снизить угловые ошибки положения целей относительно наводимого луча.
Оценивание и пролонгация координат целей и ракет в стабилизированной системе координат в отличие от прототипа, где автоматы сопровождения целей и ракет работают с угловыми нестабилизированными координатами, позволили повысить точность и устойчивость их сопровождения.
Выработка команд наведения на цель для ракеты с привлечением информации о качках ССЦР позволила повысить эффективность сопровождения ракет.
Использованная литература:
1. Моноимпульсное радиолокационное устройство сопровождения по направлению. Патент РФ №2273863. Опубл. в БИ, 2006, №10.
2. Способ измерения координат цели мобильной РЛС. Патент РФ №2410711. Опубл. в БИ, 2011, №3.
3. Зенитный ракетно-пушечный комплекс. Патент РФ №2321818. Опубл. в БИ, 2008, №10, прототип.
4. Основы построения бесплатформенных инерциальных навигационных систем / Под ред. В.Я. Распопова. - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. - 280 с.
5. Бесекерский В.А. Динамический синтез систем гироскопической стабилизации. - Л.: Судостроение, 1968. - 348 с.
6. Madgwick S. An efficient orientation filter for inertial and inertial/magnetic sensor arrays // Bristol (UK), 2010. - 32 p.
7. Трухачев А.А. Радиолокационные сигналы и их применения. - М.: Воениздат, 2005. - 320 с.
8. Bar-Shalom Y., Li X.-R., Kirubarajan Т. Estimation with Applications to Tracking and Navigation. - New York: John Wiley & Sons, 2001. - 580 p.
Патрон
Патрон
Метательное устройство артиллерийского выстрела
Универсальный боевой модуль
Способ стрельбы управляемой ракетой
Способ испытаний летательных аппаратов с телеметрической системой регистрации основных параметров и устройство для его осуществления
Способ третичной обработки радиолокационной информации в вычислительной системе пункта управления
Способ стрельбы по движущейся цели противотанковой управляемой ракетой
Способ оптической разведки телетепловизионным прицелом пусковой установки ракетного комплекса
Устройство для определения импульса силы электрозапала
Устройство для плавления снега теплом холодильной установки
Способ оттаивания воздухоохладителя холодильной установки
Способ сопровождения объекта и способ формирования сигнала управления положением луча приемно-передающего антенного устройства системы сопровождения объекта
Интегрированная автоматическая система сопровождения
Способ телеуправления ракетой
Снаряд
Устройство торможения отделяемого ракетного двигателя
Тренажер для подготовки расчетов пунктов управления зенитных ракетно-пушечных комплексов
Способ стрельбы управляемой ракетой
Способ третичной обработки радиолокационной информации в вычислительной системе пункта управления

