Результат интеллектуальной деятельности: Способ комплексирования бесплатформенных инерциальных навигационных систем
Вид РИД
Изобретение
Изобретение относится к навигационно-пилотажным комплексам, объединяющим несколько инерциальных навигационных систем для формирования обобщенной выходной информации о местонахождении объекта, его ориентации в пространстве и его скоростях, а также использующим внешнюю информацию для коррекции систем, входящих в состав комплекса.
Известны способы калибровки погрешностей бескарданной инерциальной системы на электростатических гироскопах (патенты RU №2193162 С1, 20.11.2002 [1], RU №2460043 С1, 27.08.2012 [2], RU №2375680 С1, 10.12.2009 [3], заявка US №20020008661 А1, 24.01.2002 [4], патент RU №2677099, 15.01.2019 [5]).
Так, например, известный способ [5] калибровки погрешностей бескарданной инерциальной системы реализуется при движении объекта по орбитальной траектории. При этом осуществляют его вращение последовательно вокруг осей связанных с корпусом, одновременно измеряют сигналы от внешнего эталонного устройства, например астровизирующего устройства и сигналы датчиков угла электростатических гироскопов, определяют погрешность системы, значения коэффициентов модели, характеризующих «привязки» измерительных осей гироскопов относительно осей эталонного устройства, определяют уточненные значения коэффициентов, характеризующие уход гироскопов, производят замену установленных в фильтре Калмана коэффициентов модели на их уточненные значения, производят повторные измерения сигналов, определение погрешности системы и определение уточненных значений коэффициентов модели и с их последовательной заменой в фильтре, фиксируют значения коэффициентов при минимальном значении погрешности системы.
Затем коэффициенты модели, характеризующие «привязки» измерительных осей гироскопов относительно осей эталонного устройства, вычисляют при увеличенной скорости вращения объекта, путем сравнения параметров ориентаций измерительных осей гироскопов с параметрами ориентацией осей эталонного устройства, а коэффициенты модели, характеризующие уход гироскопов, определяют после внесения определенных коэффициентов модели, характеризующих «привязки» в фильтр Калмана в качестве постоянных величин.
Технический результат - повышение точности калибровки коэффициентов модели погрешности бескарданной инерциальной системы.
Недостатками известных способов [1-5] является необходимость выполнения последовательного вращения объекта вокруг осей связанных с его корпусом с угловой скоростью равной, например, 180 град/ч (расчетная угловая скорость движения объекта по орбите), измерение сигналов от астровизирующего устройства и сигналов датчиков угла ЭСГ, совместная обработка измеренных сигналов с использованием алгоритма фильтра Калмана двадцать четвертого порядка, сформированного на основе примененной модели погрешности, включающей коэффициенты, характеризующие угловую ориентацию измерительных осей гироскопов относительно осей эталонного устройства (астровизирующего устройства), и коэффициенты, характеризующие уход гироскопов, одновременное определение погрешности системы, уточненных значений коэффициентов, замена предварительно установленных коэффициентов модели в фильтре Калмана на уточненные значения коэффициентов, продолжение измерения сигналов астровизирующего устройства и датчиков угла гироскопов, что приводит к существенной трудоемкости реализации известных способов.
Известны также способы бесплатформенной инерциальной навигации на микромеханических чувствительных элементах (патенты RU №2107897 С1, 27.03.1998 [6], RU №2256881 С2, 20.07.2005 [7], RU №2406973 С2, 20.12.2010 [8], ЕР №1489381 А2, 22.12.2004 [9], RU №2577567 С1, 20.03.2016 [10]), которые заключаются в том, что на борту подвижного объекта устанавливают микромеханические гироскопы и акселерометры, ориентируют их оси чувствительности относительно трех ортогональных его осей, затем гироскопами измеряют проекции вектора угловых скоростей, акселерометрами - проекции вектора действующего ускорения на оси координат объекта, полученные выходные сигналы фильтруют и вычисляют навигационные параметры и параметры ориентации, введена последовательность действий, при этом на борту подвижного объекта устанавливают n тетрад микромеханических гироскопов и n тетрад микромеханических акселерометров, которые располагают осями чувствительности вдоль диагоналей куба одной механической базы, грани которой ориентируют параллельно ортогональным осям объекта, а измеренные выходные сигналы тетрад преобразуют в проекции сигналов, действующих на ортогональную систему координат объекта. При этом достигается снижение погрешностей измерения совокупности примененных в способе микромеханических чувствительных элементов.
Недостатком известных способов [6-10], является малая точность. Малая точность обусловлена наличием переменных перекрестных связей между чувствительными элементами. Изменение связей происходит при изменении ориентации осей отдельно взятого элемента относительно осей других отдельно установленных микромеханических чувствительных элементов из-за деформации конструкции объекта навигации при движении.
Наиболее близкими аналогами к заявляемому техническому решению являются способы комплексирования бесплатформенных инерциальных навигационных систем (патенты US №6408245 В1, 18.06.2002 [11], RU №2380656 С1, 27.01.2010 [12], RU №2265190 С1, 27.11.2005 [13], ЕР №0763714 А2, 26.07.1996 [14], SU №1747905 A1, 15.07.1992 [15], RU №2634082 С1, 23.10.2017 [16]).
Наиболее близким из аналогов к заявляемому техническому решению является способ комплексирования бесплатформенных инерциальных навигационных систем (патент №2634082 С1, 23.10.2017 [16]), который выбран в качестве прототипа, и который относится к навигационно-пилотажным комплексам,
объединяющим несколько инерциальных навигационных систем для формирования обобщенной выходной информации о местонахождении объекта, его ориентации в пространстве и его скоростях, а также использующим внешнюю информацию для коррекции систем, входящих в состав комплекса. При этом техническим результатом является повышение точности выходной информации навигационно-пилотажного комплекса и глубины контроля систем, входящих в состав комплекса. Для этого выходная информация, поступающая по меньшей мере с двух бесплатформенных инерциальных систем, сравнивается по мажоритарному признаку, после чего отбраковывается информация той бесплатформенной инерциальной системы, которая наиболее отклоняется от остальных, при этом согласно изобретению первичная информация в виде матриц ориентации и приращений линейных скоростей поступает с выходов бесплатформенных инерциальных систем на вход блока обработки первичной информации, в котором по заданному критерию формируется осредненное значение матрицы ориентации и приращения линейных скоростей, эти осредненные значения поступают на вход блока решения навигационных уравнений, а полученные в результате решения навигационных уравнений выходные параметры в виде текущих координат и курса объекта и его скоростей поступают на вход блока контроля, в котором производится сравнение выходных параметров бесплатформенных инерциальных систем с выходными параметрами блока решения навигационных уравнений и анализ отказных ситуаций узлов бесплатформенных инерциальных навигационных систем (БИНС). При реализации известного способа [16] выявлена малая эффективность средневзвешенного осреднения при последующей оценки вырабатываемых параметров, что приводит к недостаточной достоверности и точности выработки навигационных и динамических параметров при решении специальных задач (динамическое позиционирование с целью спасения с затонувших объектов, картографирование океана, поиск затонувших объектов, налив нефти с использованием выносных приемных устройств).
Повышение точности выработки навигационных и динамических параметров может быть достигнуто путем доработки непосредственно чувствительных элементов БИНС (гироскопов и акселерометров). Фактически этот путь представляет разработку новой высокоточной БИНС. Например, повышение точности гироскопов может быть достигнуто за счет увеличения длины волоконно-оптического кабеля в 2-3 раза, что влечет изменение конструкции БИНС. В связи с относительно небольшой потребностью в высокоточных БИНС их стоимость будет превышать стоимость систем средней точности в 3-4 раза.
В то же время существует более простой способ повышения точности - это комплексирование нескольких каналов выработки выходной информации при устаноке на объекте двух и более БИНС.
Задачей предлагаемого технического решения является повышение достоверности выработки навигационных и динамических параметров БИНС.
Поставленная задача решается за счет того, что в способе комплексирования бесплатформенных инерциальных навигационных систем, заключающимся в том, что выходная информация, поступающая по меньшей мере с двух бесплатформенных инерциальных навигационных систем, сравнивается по мажоритарному признаку, после чего отбраковывается информация той бесплатформенной инерциальной навигационной системы, которая наиболее отклоняется от остальных, первичная информация в виде матриц ориентации и приращений линейных скоростей поступает с выходов бесплатформенных инерциальных навигационных систем на вход блока обработки первичной информации, в котором по заданному критерию формируется осредненное значение матрицы ориентации и приращения линейных скоростей, эти осредненные значения поступают на вход блока решения навигационных уравнений, а полученные в результате решения навигационных уравнений выходные параметры в виде текущих координат и курса объекта и его скоростей поступают на вход блока контроля, в котором производится сравнение выходных параметров бесплатформенных инерциальных навигационных систем с выходными параметрами блока решения навигационных уравнений и анализ отказных ситуаций узлов бесплатформенных инерциальных навигационных систем, в котором при превышении порога при использовании мажоритарного признака одноименных параметров двух и более бесплатформенных инерциальных навигационных систем, выполняется сравнение попарных разностей показаний бесплатформенных инерциальных навигационных систем для каждого, вырабатываемого параметра с порогами, равными удвоенному значению погрешностей выработки параметров, указанных в технических условиях на бесплатформенную инерциальную навигационную систему, при этом если при оценке нескольких бесплатформенных инерциальных навигационных систем выявлены бесплатформенные инерциальные навигационные системы разности с участием значений которых превышают пороги, то выполняется поиск пары бесплатформенных инерциальных навигационных систем у которых взаимные разности наименьшие и их значения наиболее приближены к параметрам навигационной аппаратуры потребителей глобальной спутниковой навигационной систем по составляющим скорости и координатам, при превышении порога попарными разницами одноименных параметров всех бесплатформенных инерциальных навигационных систем производится оценка попарных разниц путем средневзвешенного осреднения курса двух каналов всех бесплатформенных инерциальных навигационных систем с использованием реализаций дисперсий оценки курса DK, в соответствии с формулой
K=(Ki*mKj2+Kj*mKi2)/(mKj2*mKi2),
где: i, j - номера информационного канала, полученных осреднением курса 3-х и 4-х каналов - 1-2-3, 1-2-4, 1-3-4, 2-3-4, 1-2-3-4.
Pi=1/mi2 - вес измеренного значения канала i,
mi - среднеквадратическая погрешность (СКП) измеренного значения канала i.
Учитывая независимость каналов БИНС, снижения уровня погрешностей можно добиться за счет увеличения каналов, используемых для выработки выходной информации.
При выборе соответствующего количества каналов можно обеспечить повышение точности выработки, например, курса навигационного объекта в два раза за счет простого или средневзвешенного осреднения выходных параметров.
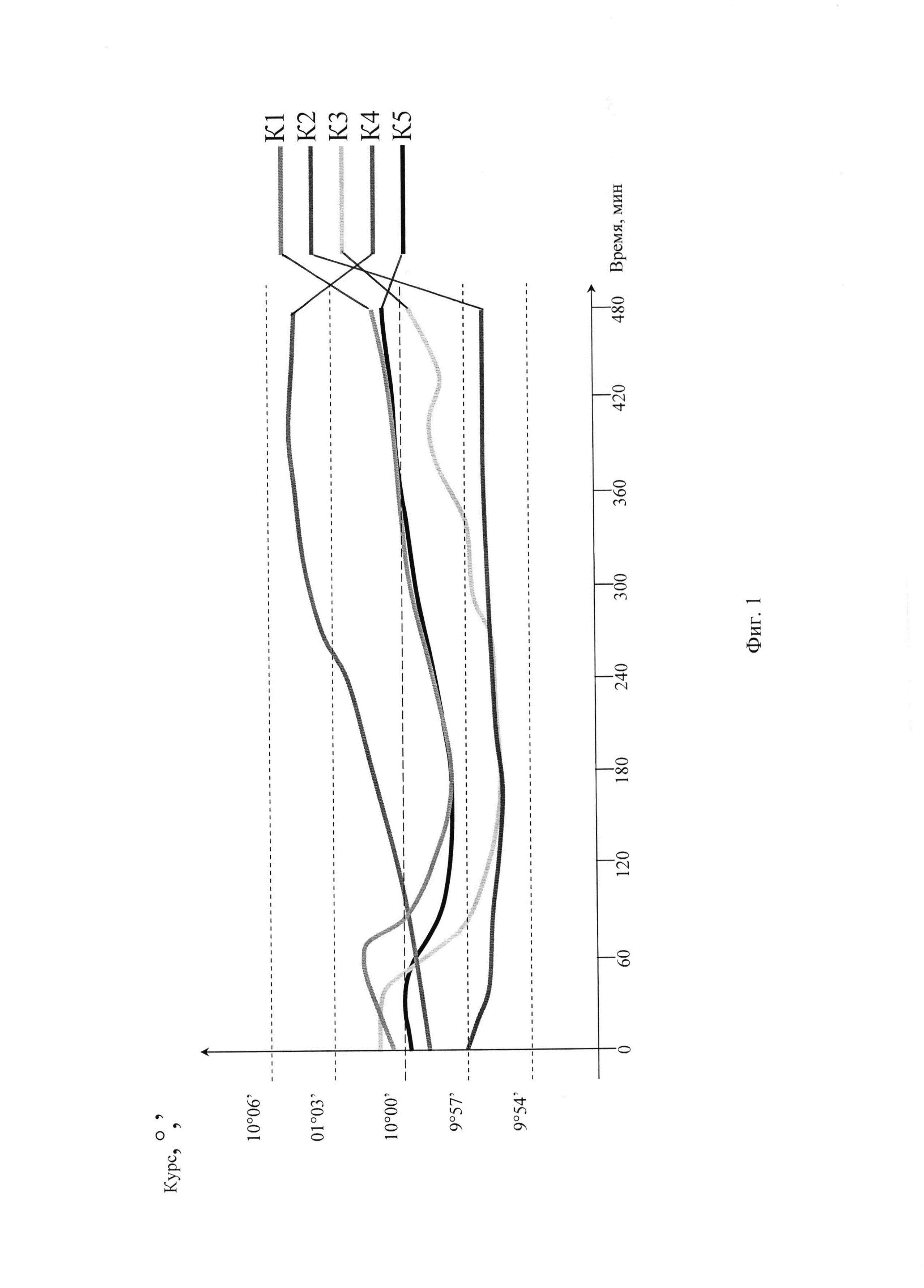
Реализация предлагаемого способа поясняется графическими материалами (фиг. 1, 2).
На фиг. 1 представлены графики реализаций курса 4 каналов (К1,К2,К3,К4) и курса, полученного простым осреднением курса четырех каналов - К5.
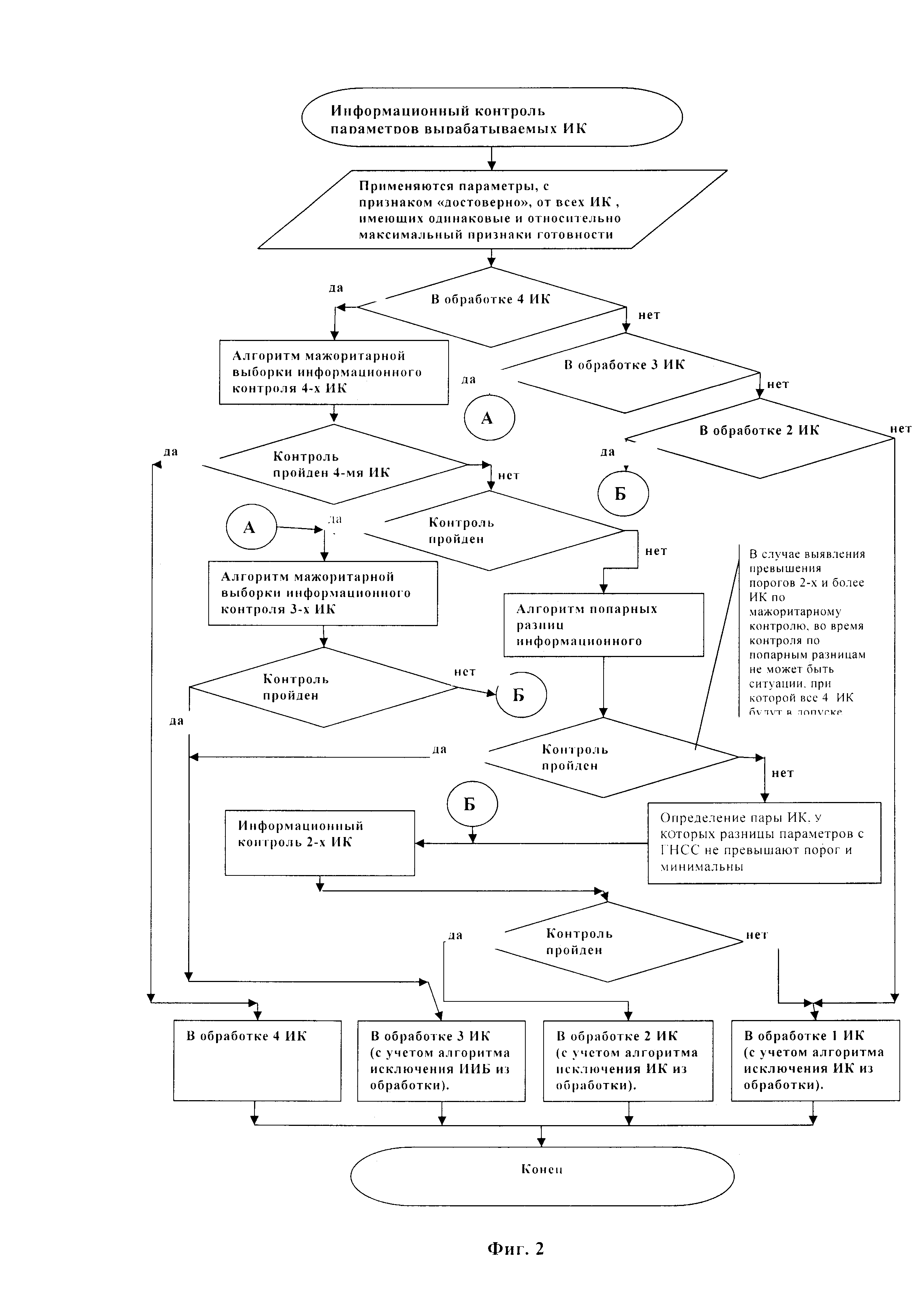
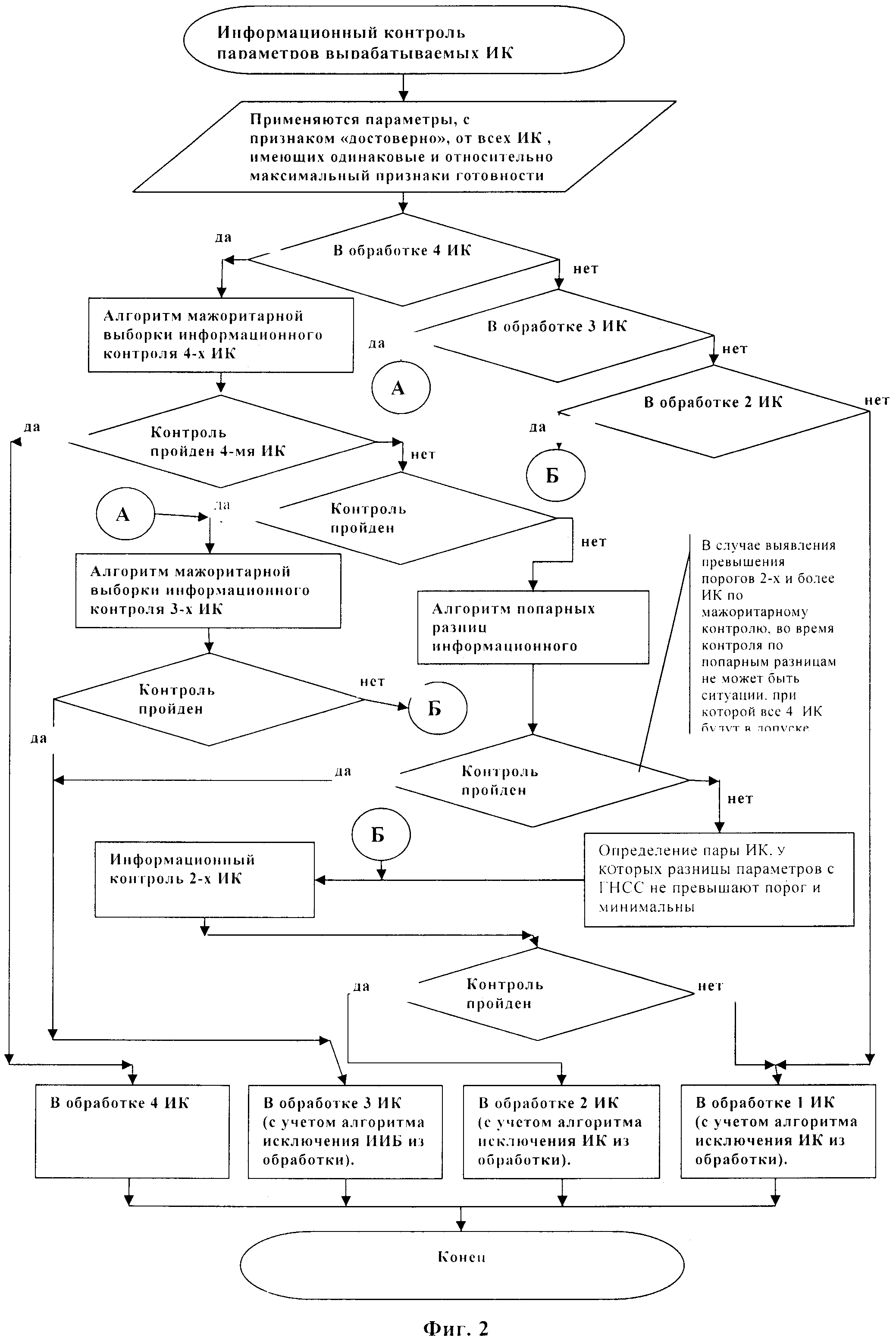
На фиг. 2 представлен общий алгоритм информационного контроля, где ИК - измерительный канал.
Комплексирование нескольких БИНС может быть выполнено, как и в прототипе [16], путем предварительной обработки первичной информации, поступающей с систем - матрица ориентации и ускорения в осях акселерометров блока чувствительных элементов (БЧЭ) - с последующим решением навигационных уравнений на основе обработанной первичной информации, получаемой от систем, входящих в состав комплекса, с последующим контролем поступающей от систем в комплекс информации на аналогичных функциональных узлах и измерительных блоках.
При этом выходная информация, поступающая по меньшей мере с двух бесплатформенных инерциальных навигационных систем, сравнивается по мажоритарному признаку, после чего отбраковывается информация той бесплатформенной инерциальной навигационной системы, которая наиболее отклоняется от остальных, первичная информация в виде матриц ориентации и приращений линейных скоростей поступает с выходов бесплатформенных инерциальных навигационных систем на вход блока обработки первичной информации, в котором по заданному критерию формируется осредненное значение матрицы ориентации и приращения линейных скоростей, эти осредненные значения поступают на вход блока решения навигационных уравнений, а полученные в результате решения навигационных уравнений выходные параметры в виде текущих координат и курса объекта и его скоростей поступают на вход блока контроля, в котором производится сравнение выходных параметров бесплатформенных инерциальных навигационных систем с выходными параметрами блока решения навигационных уравнений и анализ отказных ситуаций узлов бесплатформенных инерциальных навигационных систем.
В отличие от прототипа [16] в предлагаемом техническом решении при превышении порога при использовании мажоритарного признака одноименных параметров двух и более бесплатформенных инерциальных навигационных систем, выполняется сравнение попарных разностей показаний бесплатформенных инерциальных навигационных систем для каждого, вырабатываемого параметра с порогами, равными удвоенному значению погрешностей выработки параметров, указанных в технических условиях на бесплатформенную инерциальную навигационную систему, при этом если при оценке нескольких бесплатформенных инерциальных навигационных систем выявлены бесплатформенные инерциальные навигационные системы разности с участием значений которых превышают пороги, то выполняется поиск пары бесплатформенных инерциальных навигационных систем у которых взаимные разности наименьшие и их значения наиболее приближены к параметрам навигационной аппаратуры потребителей глобальной спутниковой навигационной систем по составляющим скорости и координатам, при превышении порога попарными разницами одноименных параметров всех бесплатформенных инерциальных навигационных систем производится оценка попарных разниц путем средневзвешенного осреднения курса двух каналов всех бесплатформенных инерциальных навигационных систем с использованием реализаций дисперсий оценки курса DK, в соответствии с формулой
K=(Ki*mKj2+Kj*mKi2)/(mKj2*mKi2),
где: i, j - номера информационного канала, полученных осреднением курса 3-х и 4-х каналов - 1-2-3, 1-2-4, 1-3-4, 2-3-4, 1-2-3-4.
Pi=1/mi2 - вес измеренного значения канала i,
mi - среднеквадратическая погрешность (СКП) измеренного значения канала i.
При испытаниях в морских условиях двух БИНС типа «Кама-НС-В», в качестве исходных выходных параметров использовались реализации 4-х каналов по курсу (К).
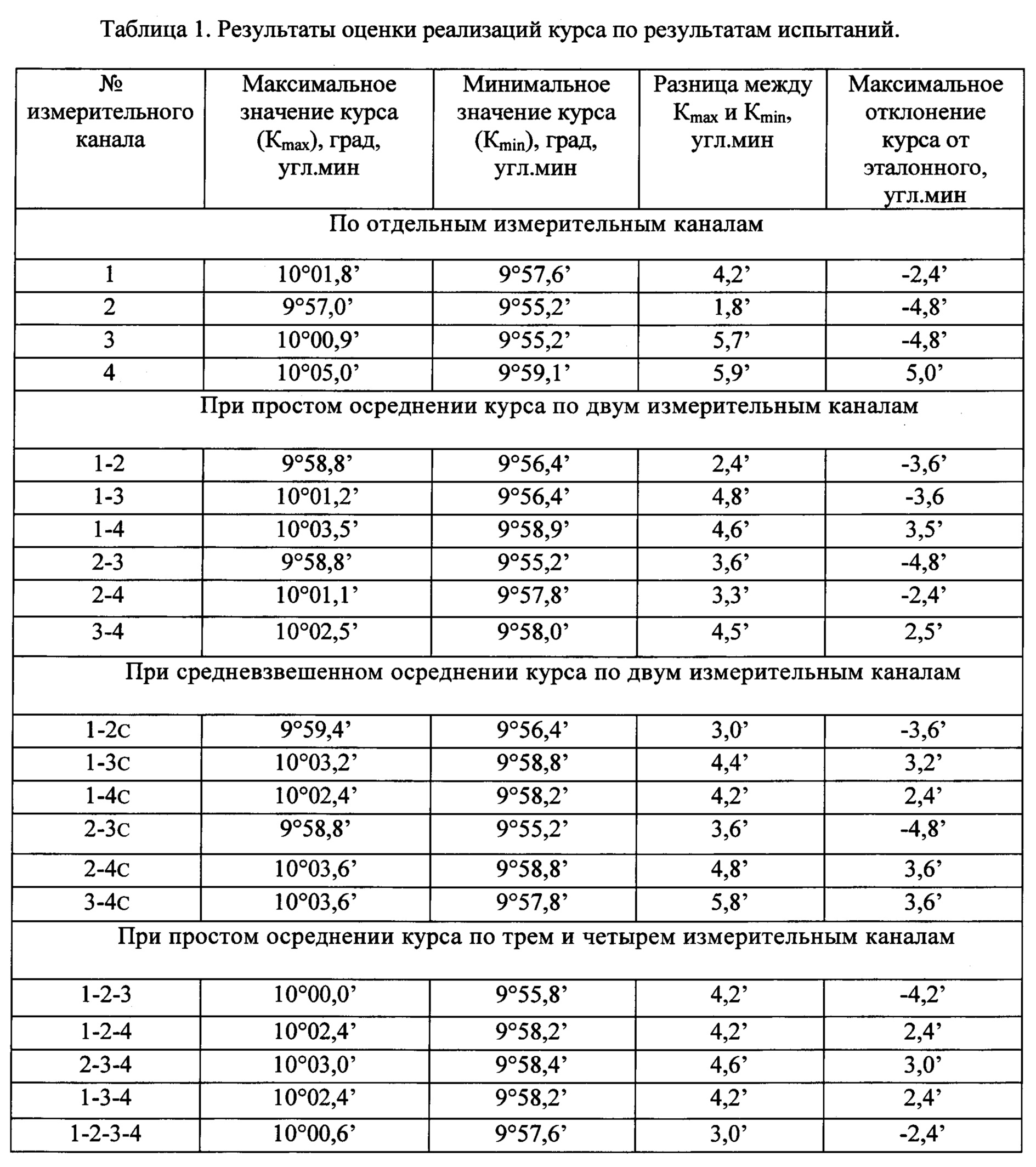
В таблице 1 представлены результаты оценки следующих реализаций курса:
- исходных каналов - 1, 2, 3, 4
- полученных простым осреднением курса 2-х каналов - 1-2, 1-3, 1-4, 2-3, 2-4, 3-4
- полученных средневзвешенным осреднением курса 2-х каналов - 1-2с, 1-3с, 1-4с, 2-3с, 2-4 с, с использованием реализаций дисперсий оценки курса DK, в соответствии с формулой
K=(Ki*mKj2+Kj*mKi2)/(mKj2*mKi2),
где: i, j - номера информационного канала, полученных осреднением курса 3-х и 4-х каналов - 1-2-3, 1-2-4, 1-3-4, 2-3-4, 1-2-3-4.
Pi=1/mi2 - вес измеренного значения канала i,
mi - среднеквадратическая погрешность измеренного значения канала i.
Во втором и третьем столбцах таблицы 1 представлены максимальное и минимальное значения реализаций курса.
В четвертом столбце приведена разница между максимальным и минимальным значениями реализации.
В пятом столбце приведено максимальное отклонение реализации курса от эталонного значения - 10°.
Анализ приведенных в таблице 1 оценок погрешностей курса показывает, что повышение точности в 4 раза (до 3 угловых минут) достигается в следующих реализациях: один канал - 25% реализаций; два канала - 33% реализаций; два канала со средневзвешенным осреднением - 17% реализаций; три канала - 75% реализаций; четыре канала - 100% реализаций.
Следует отметить, что 100% реализаций, использующих даже 3 канала, обеспечивают точность выработки курса на уровне 5 угловых минут, то есть повышение точности в 2,4 раза (относительно заявленной точности - 12 угловых минут).
Кроме того, выявленная малая эффективность средневзвешенного осреднения послужила основанием не использовать этот метод при последующей оценки остальных параметров.
Проведенный анализ показывает, что осреднение выходной информации каналов, например, БИНС «Кама-НС-В», широко применяемой на морских подвижных объектах, позволяет повысить точность выработки курса в 2,4 раза при комплексировании 3-х каналов и в 4 раза при комплексировании 4-х каналов.
Одной из подзадач комплексирования является информационный контроль выработки параметров инерциальных измерительных блоков для учета в выработке комплексированных выходных параметров.
Достоверность информации каждого измерительного канала БИНС, определяется на основании его собственного автономного контроля, проводимого с учетом навигационных параметров поступающих от ГНСС и относительного лага.
Алгоритм информационного контроля при четырех или трех измерительных каналов в обработке основан на мажоритарной выборке и, при необходимости, в сравнении попарных разностей показаний БИНС.
В информационном контроле принимают участие измерительные каналы БИНС, имеющие одинаковый, но наиболее приоритетный, признак готовности и параметры которых достоверны.
Признак готовности определяется по времени с момента запуска БИНС:
с 0-й по 3-ю - минуты параметры не вырабатываются;
с 4-ой минуты - с достоверностью вырабатываются параметры стабилизации;
с - 31-ой по 60 минуту - с признаком достоверно вырабатывается курс с точностью не хуже 1°;
с 61-ой минуты - все параметры вырабатываются с признаком достоверно, в соответствии с техническими условиями на конкретную БИНС.
В качестве основного параметра используется параметр К (курс), но оценка выработки осуществляется по всем параметрам, вырабатываемым всеми четырьмя измерительными каналами БИНС. Каждый измерительный канал проходит контроль по критерию разницы параметров с ГНСС.
При мажоритарной выборке выполняется оценка разностей параметров, вырабатываемых каждым измерительным каналом с осредненными значениями параметров, поступающих от всех измерительных каналов, участвующих в обработке, на предмет превышения установленного порога. Для данного метода значения порогов равны значениям погрешностей выработки параметров, указанных в технических условиях на БИНС. Например, в БИНС «Кама-НС-В» для параметра К (курс географический) порог разницы курсов равен 12'.
В случае отсутствия факта расхождения по одноименным параметрам, все измерительные каналы участвуют в формировании выходных данных путем алгебраического осреднения.
Если при обработке данных от 4-х измерительных каналов превышение порога выявлено для одного измерительного канала, то этот измерительный канал исключается из обработки (см. алгоритм исключения измерительного канала из обработки - фиг. 2) и выполняется контроль мажоритарным методом для 3-х измерительных каналов.
В случае превышения порога при использовании мажоритарного метода одноименных параметров двух и более измерительных каналов, выполняется сравнение попарных разностей показаний измерительных каналов для каждого, вырабатываемого задачей, параметра с порогами, равными удвоенному значению погрешностей выработки параметров, указанных в технических условиях на БИНС. Например, в БИНС «Кама-НС-В» для параметра К (курс географический) порог по парной разницы курсов равен 24'.
При выявлении факта расхождения разницы по одноименным параметрам одного измерительного канала, он исключается из обработки (см. алгоритм исключения измерительного канала из обработки - фиг. 2)). Выработка значений выходных данных производится без параметров исключенного измерительного канала, то есть при начальной работе 4-х измерительных каналов остается 3, при работе 3-х измерительных каналов остается 2.
Если при оценке 4-х измерительных каналов выявлено два измерительных канала, разности с участием значений которых превышают пороги, то выполняется поиск пары измерительных каналов у которых взаимные разности наименьшие и их значения наиболее приближены к параметрам ГНСС по составляющим скорости и координатам. Другие два измерительных канала исключаются из обработки (см. алгоритм исключения измерительных каналов из обработки - фиг. 2).
В случае отсутствия факта расхождения по одноименным параметрам производится осреднение данных.
В случае превышения порога попарными разницами одноименных параметров всех измерительных каналов производится оценка попарных разниц по другим параметрам и выявление измерительных каналов, который должен быть исключен из обработки. Дополнительно оцениваются попарные разницы параметров измерительных каналов с параметрами, поступающими от ГНСС с признаком «достоверно», а именно составляющие скорости и географические координаты места. Измерительный канал, разница параметров которого с параметрами ГНСС наименьшая, участвует в выработке выходных параметров. Если разница между параметрами измерительных каналов и ГНСС не превышает заданных значения порогов, то параметры этого измерительного канала участвует в формировании выходных параметров. Если и этот способ не позволяет определить измерительный канал вырабатывающие наиболее точные значения, то информация от БИНС считается недостоверной, при этом оператору на экране пульта управления высвечивается соответствующее предупреждение о недостоверности навигационных параметров от БИНС и необходимости оценки их работы. Значения порогов для оценки данных разниц равны суммам погрешностей одноименных параметров БИНС и ГНСС.
При мажоритарной выборке, за счет контроля разниц одноименных параметров между каждым измерительным каналом и ГНСС, исключается ситуация, при которой из обработки выводится исправный измерительный канал, так как измерительный канал демпфируются по скорости, поступающей от ГНСС, а соответственно в оценке 3-х измерительных каналов добавляется 4-ый источник данных от ГНСС, который по точности выработки скорости (0,05 м/с) превосходит БИНС, например, БИНС «Кама-НС-В» в 8 раз (0,4 м/с), то есть является эталоном.
При информационном контроле при выработке навигационных параметров по данным двух измерительных каналов, находящихся в обработке, осуществляется путем арифметического осреднения их показаний, если разность одноименных параметров не превышает значения порога равному удвоенному значению погрешности изложенной в технических условиях на БИНС. В противном случае используется информация от того измерительного канала, у которого обобщенный признак готовности больше, то есть больше параметров вырабатываются с признаком достоверно. Такая ситуация возможна во время приготовления, например, БИНС «Кама-НС-В», так как в период от 30 до 60 минут после запуска точность выработки курса составляет 1°, соответственно, нецелесообразно проводить осреднение курсов, заведомо вырабатываемых с разной точностью (запуск измерительных каналов одного или двух БИНС «Кама-НС-В» может быть выполнен оператором разновременно).
Если признаки готовности одинаковы, но признаки автономного контроля разные, то используется информация от того измерительного канала, у которого отсутствует признак недостоверности.
Дополнительно оцениваются попарная разница параметров измерительных каналов с параметрами, поступающими от ГНСС, по аналогии с информационным контролем 4-х или 3-х измерительных каналов.
Если в контур включена только одна БИНС, то в качестве выходных данных задачи используются соответствующие выходные параметры этого средства, на основании его собственного автономного контроля. Для дополнительного контроля достоверности курса могут быть также использованы системы курсоуказания по визуальным и астронавигационным ориентирам или спутниковый компас.
Алгоритм исключения измерительных каналов из обработки заключается в следующем.
Навигационные и динамические параметры, например, БИНС «Кама-НС-В» вырабатываются с частотой 100 Гц, но для расчета разницы принимаются значения с частотой 1 Гц (последнее из ста мгновенных значений за секунду). Если превышения разницы наблюдаются в течение 3-х секунд подряд, то соответствующий измерительный канал исключается из обработки. В случае разового превышения параметров включается автоматический контроль разницы в течении 16 минут 40 секунд (1000 секунд), если количество превышений не превышает 3-х, то все измерительные каналы участвуют в обработке. Если за указанное время наблюдается четыре превышения, то соответствующий измерительный канал исключается из обработки сразу. Время 16 минут 40 секунд выбрано исходя из формирования 1000 разниц, так как в технических условиях на БИНС «Кама-НС-В» погрешность выработки параметров указана для вероятности 0,997, соответственно из тысячи значений допускается 3 отклонения от требований технических условий. Применение предлагаемого технического решения позволяет повысить точность и достоверность выработки навигационных и динамических параметров БИНС.
Источники информации
1. Патент RU №2193162 С1, 20.11.2002.
2. Патент RU №2460043 С1, 27.08.2012.
3. Патент RU №2375680 С1, 10.12.2009.
4. Заявка US №20020008661 А1, 24.01.2002.
5. Патент RU №2677099, 15.01.2019.
6. Патент RU №2107897 С1, 27.03.1998.
7. Патент RU №2256881 С2, 20.07.2005.
8. Патент RU №2406973 С2, 20.12.2010.
9. Патент ЕР №1489381 А2, 22.12.2004.
10. Патент RU №2577567 С1, 20.03.2016.
11. Патент US №6408245 В1, 18.06.2002.
12. Патент RU №2380656 Cl, 27.01.2010.
13. Патент RU №2265190 С1, 27.11.2005.
14. Патент ЕР №0763714 А2, 26.07.1996.
15. Патент SU №1747905 А1, 15.07.1992.
16. Патент RU №2634082 С1, 23.10.2017.
Способ картографического отображения двухмерных распределений, заданных в цифровой форме
Способ определения глубин акватории гидролокатором бокового обзора и гидролокатор бокового обзора для его осуществления
Донная станция
Измеритель скорости для судов ледового плавания
Способ стереосъемки рельефа дна акватории и устройство для его осуществления
Способ добычи подводных залежей газовых гидратов и подводный добычный комплекс газовых гидратов
Измеритель скорости для судов ледового плавания
Устройство измерения параметров волнения
Способ обнаружения возможности наступления катастрофических явлений
Способ определения предвестника землетрясения

