Результат интеллектуальной деятельности: ЛЕПЕСТКОВЫЙ МЕХАТРОННЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК
Вид РИД
Изобретение
Изобретение относится к турбомашиностроению и может быть использовано в качестве опор высокоскоростных роторов машин и агрегатов, нагруженных радиальными нагрузками, в системах кондиционирования воздуха кабин летательных аппаратов, а также систем турбонаддува в современном автомобилестроении.
Известен лепестковый газодинамический подшипник с активным управлением, который является наиболее близким по технической сущности к предлагаемому изобретению, содержащий корпус, в который вставлены пьезоактуаторы, расположенные равномерно по окружности корпуса, и тонкий лепесток, (см. патент РФ №2568005, МПК F16C 17/12, опубл. 10.11.2015 г.).
Недостатком является значительное количество пьезоэлектрических актуаторов и, следовательно, высокое энергопотребление, сложность управления и недостаточная надежность подшипникового узла.
Задача, на решение которой направлено изобретение, состоит в улучшении динамических характеристик высокоскоростного ротора, повышении надежности и энергоэффективности подшипникового узла, а также ресурса работы при многократных пусках и остановах.
Техническая задача достигается тем, что в лепестковом мехатронном газодинамическом подшипнике содержится корпус, в паз которого вставлены тонкий лепесток, круговой гофрированный элемент и пьезоэлементы, согласно изобретению, в продольные пазы корпуса вставлены пакетные пьезоэлементы, изменяющие форму опорной поверхности подшипника воздействием на круговой гофрированный элемент в радиальном направлении, позволяющие снимать данные о положении вала и деформациях опорной поверхности, а также варьировать жесткостью опорной поверхности.
Технический результат заключается в улучшении динамических характеристик высокоскоростного ротора, повышении надежности и энергоэффективности подшипникового узла, а также ресурса работы при многократных пусках и остановах.
Сущность изобретения поясняется чертежами.
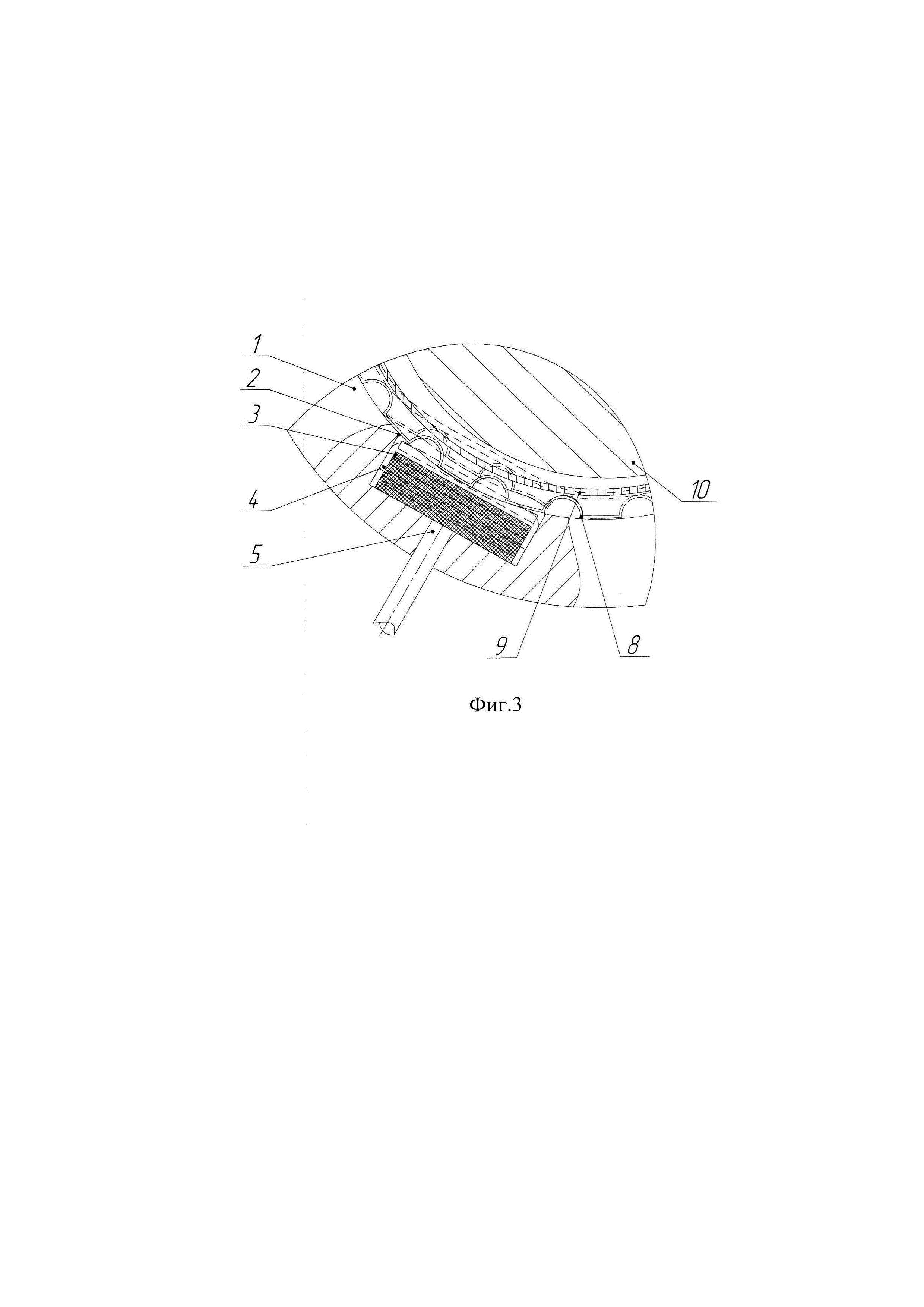
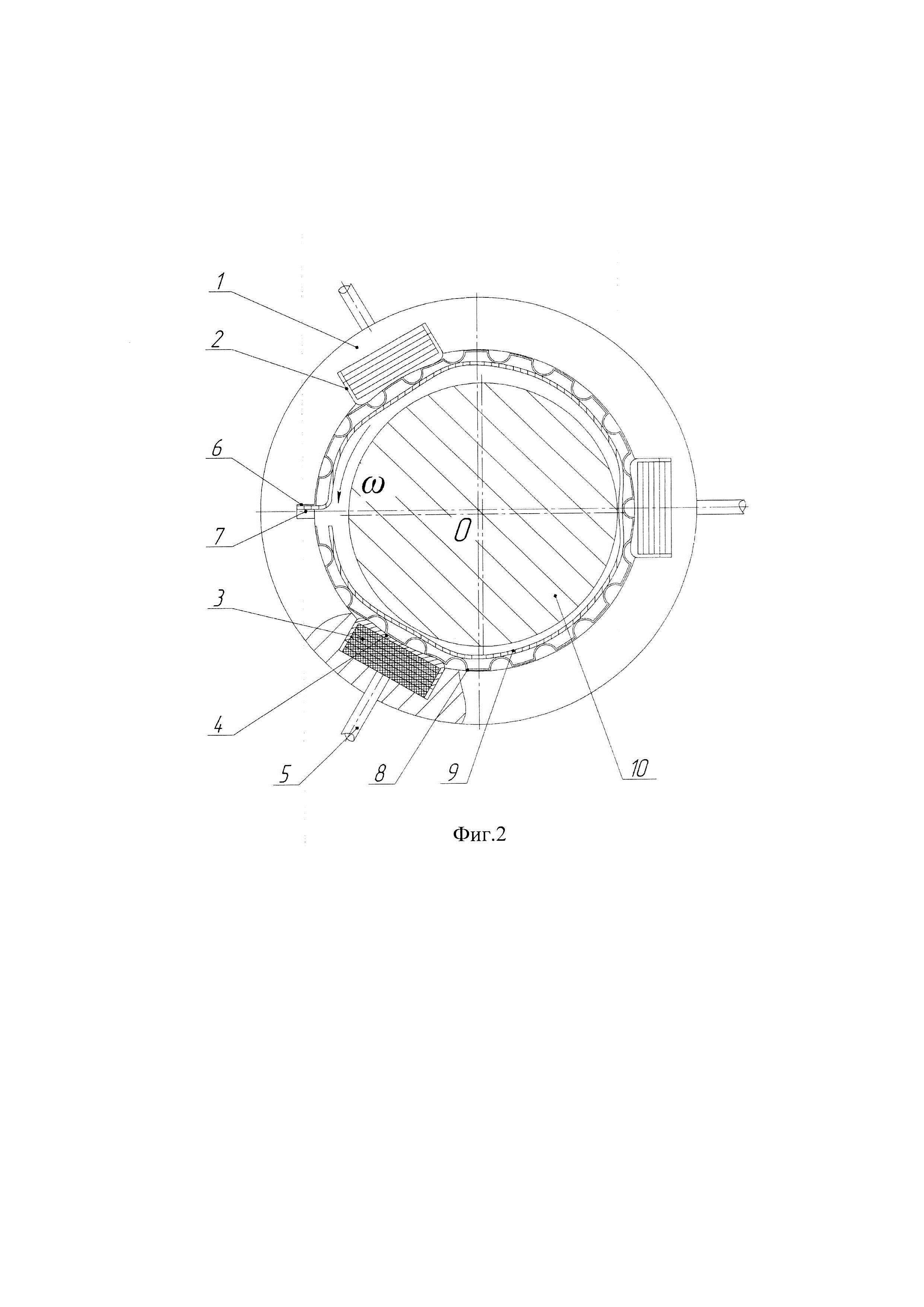
На фиг. 1 изображен лепестковый мехатронный газодинамический подшипник в момент пуска и останова, на фиг. 2 изображен вид пьезоактуатора при наличии электрического напряжения, на фиг. 3 изображен пьезоактуатор при включенном и выключенном состоянии.
Лепестковый мехатронный газодинамический подшипник (фиг. 1) представляет собой опору скольжения, состоящую из корпуса 1, выполненного в виде втулки с продольными пазами 2, в которых размещены пакетные пьезоэлементы 3, защищенные от износа защитными колпачками 4, управляемые посредством подачи необходимого значения напряжения на провода 5. Для создания упругоподатливой рабочей поверхности корпус 1 подшипника имеет продольный паз 6, в котором при помощи призматической шпонки 7 закреплены круговой гофрированный элемент 8 и тонкий лепесток 9, охватывающий вал 10.
Устройство работает следующим образом.
При отсутствии электрического напряжения на проводах 5 пакетных пьезоэлементов 3 круговой гофрированный элемент 8 и лепесток 9 формируют цилиндрическую опорную поверхность - конструкция функционирует как однолепестковый газодинамический подшипник (фиг. 1 и 3). Во время работы при достижении заданной частоты вращения или при возникновении опасных колебаний, связанных с потерей устойчивости, на провода 5 (фиг. 2 и 3) подается необходимое напряжение, пакетные пьезоэлементы 3 увеличиваются в размерах, воздействуя через защитные колпачки 4 на круговой гофрированный элемент 8, который деформирует тонкий лепесток 9, перестраивая цилиндрическую упругую опорную поверхность в многоклиновую. При этом возникают равномерно расположенные по окружности эпюры давления, что приводит к минимизации амплитуды колебаний и повышению устойчивости движения.
Лепестковый мехатронный газодинамический подшипник, содержащий корпус, в паз которого вставлены тонкий лепесток, круговой гофрированный элемент и пьезоэлементы, отличающийся тем, что в продольные пазы корпуса вставлены пакетные пьезоэлементы, изменяющие форму опорной поверхности подшипника воздействием на круговой гофрированный элемент в радиальном направлении, позволяющие снимать данные о положении вала и деформациях опорной поверхности, а также варьировать жесткостью опорной поверхности.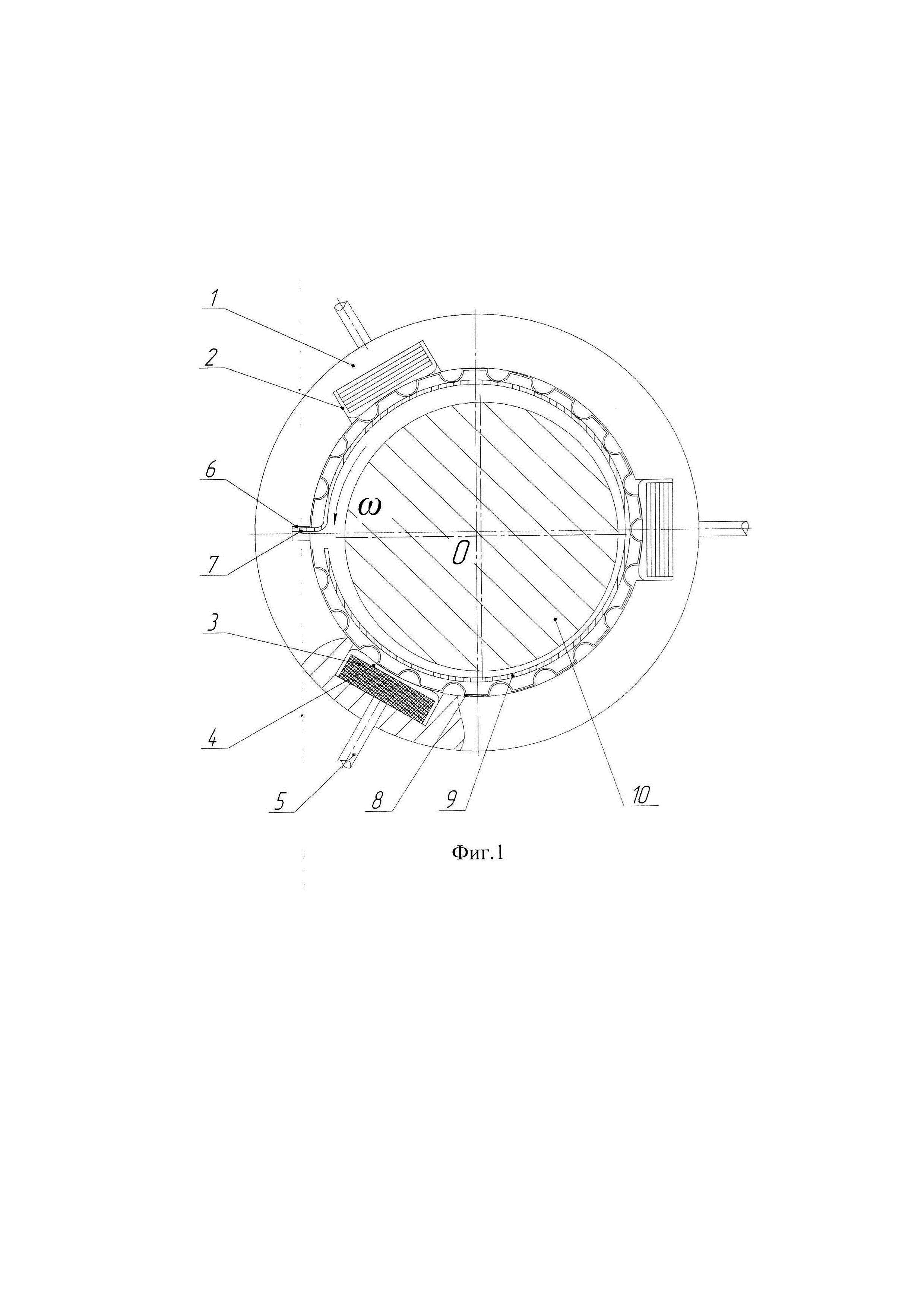
Комбинированная опора
Способ применения вискоэластика в медицинском тренажере для обучения технике сосудистых операций
Испытательный стенд для исследования роторных систем
Гидравлическое ударно-скалывающее устройство
Бесконтактное пальчиковое уплотнение с активным управлением зазором
Устройство стендового автоматизированного лабораторного комплекса для изучения политропного процесса и комбинированного теплообмена
Система пылеудаления при выгрузке сыпучих материалов в приемный бункер
Комбинированная опора
Способ арефлюксной пилоропластики при недостаточности пилорического сфинктера и синдроме шмидена
Антиадгезионное покрытие фунгицидного действия
Реверсивная комбинированная опора
Комбинированная опора
Инерционный способ измерения вязкости
Инерционный вискозиметр
Комбинированная опора
Рабочее колесо дымососа
Устройство для накатывания
Гидромеханическая муфта
Способ получения подшипника скольжения
Комбинированная опора

