Результат интеллектуальной деятельности: Устройство для подводной подледной сейсмической разведки
Вид РИД
Изобретение
Изобретение относится к области геофизики и может быть использовано для проведения подводной многомерной сейсмической разведки на акваториях, покрытых льдом круглогодично или большую часть года.
Известно «Подводное транспортное средство с продольно расположенными антеннами для приема акустических сигналов» (Патент ЕР №0214525 А1 МПК: B63G 8/39, G01V 1/38), которое содержит складные приемные системы по бокам и при необходимости по дну корпуса подводной лодки. Приемные системы представляют собой группы сейсмических датчиков, как вариант они могут представлять собой сейсмические косы. В нерабочем положении приемные системы прижаты к бортам подводной лодки и не мешают движению.
Недостатком такого технического решения является то, что конструкция не предусматривает возможности разворота приемных систем в приемную решетку большой площади для эффективной реализации сейсморазведки 3D. Так, при использовании описанного механизма прижатия приемных систем к бортам подводной лодки площадь итоговой приемной решетки ограничена суммарной площадью бортов. Это очень существенно снижает эффективность работы такой системы и заметно увеличивает время, необходимое для сейсморазведки 3D больших территорий.
Известно «Устройство и способ для сейсмического измерения морского дна с использованием подводной лодки» (Патент WO №2015/110255 А1 МПК: G01V1/38) взятое за прототип, предназначенное для сейсмического исследования дна в районах, покрытых льдом. Основными признаками в данном устройстве являются подводная лодка, пилотируемая или беспилотная, источник излучения звуковых волн для излучения акустических волн в направлении морского дна, лебедок с цепями гидрофонов, отводные блоки, разводящие растягивающее устройство, через узлы которого проходят цепи гидрофонов.
Недостатком данного устройства является то, что устройство предназначено для определения только трехмерной структуры поверхности морского дна. При буксировке подводной лодкой отводных блоков, разводящих цепи гидрофонов с помощью растягивающего устройства имеющего специальные узлы для прохода цепей гидрофонов, отводные блоки имеют фиксированную длину между собой. Также к недостатку можно отнести конструкцию растягивающего устройства, на котором узлы для прохода цепей гидрофонов находятся на постоянном расстоянии, обеспечивая фиксированное расстояние между цепями гидрофоном с начальным параллельным положением цепей гидрофонов между собой на растягивающем устройстве в направлении движения подводной лодки. Такая конструкция растягивающего устройства с отводными блоками не даст стабильного параллельного движения и постоянного расстояния между цепями гидрофонов по всей длине цепей гидрофонов из-за наличия следа возмущения потока от винта, разницы плотностей воды и наличия течения при прямолинейном движении подводной лодки. В дополнение, смена курса в режиме циркуляции подводной лодки может привести к запутыванию и в следствии к разрыву цепей гидрофонов. Также во время развертывания цепей гидрофонов, возможно, их отсечение винтом подводной лодки. Такая конструкция устройства может привести к нестабильной курсовой устойчивости и тем самым неприемлемой работе цепей гидрофонов по приему отраженного от дна звуковых волн с последующей некорректной обработкой сигналов в блоке обработке.
Задача предполагаемого изобретения заключается не только в определении трехмерной структуры поверхности морского дна, но и в проведении многомерной сейсмической разведки структуры недр с вероятными местами расположения ловушек, где могут находится углеводороды. В проведении автоматической развертки буксируемых цепей гидрофонов за подводной лодкой с учетом технологических решений по компоновке цепей гидрофонов и буксировки их с возможностью различного постоянного расстояния между ними, не только в горизонте, но и в пространстве толщи воды, на всей протяженности цепей гидрофонов в независимости от их длин, для обеспечения различных способов расширения приема спектра сигнала. Тем самым исключении нестабильной курсовой устойчивости, запутывания, и как следствие, разрыва, отсечения буксируемых цепей гидрофонов, что может привести к потере всего буксируемого оборудования, а возможно и подводной лодки в акваториях, покрытых льдом круглогодично или большую часть года. Также данное изобретение позволит развернуть приемные цепи гидрофонов в большую приемную решетку за меньшее количество времени, что приведет к сокращению времени необходимого для проведения многомерной сейсмической разведки и повысит эффективность работы такого устройства на больших исследуемых площадях.
Поставленная задача достигается тем, что подводная лодка снабжена контейнером и приводным винтом, который снабжен защитной насадкой, причем в контейнере размещена, по меньшей мере, одна лебедка. Габариты лебедки зависят от длины, размещенной на ней цепи гидрофонов представленной в виде, например, сейсмической косы. Длина сейсмической косы многократно превышает длину подводной лодки. Крылья управления подводной лодкой с рулями глубины, снабжены, по меньшей мере, одной обтекаемой стойкой с рулем поворота в горизонтальной плоскости. На обтекаемых стойках размещена обтекаемая консоль с по меньшей мере, одной обтекаемой надстройкой. Обтекаемая надстройка снабжена, по меньшей мере, одним концевым телом, устройством контроля положения сейсмической косы и отводящим аппаратом. Концевое тело, жестко соединено с сейсмической косой, а устройства контроля положения сейсмических кос и отводящий аппарат выполнены с возможностью фиксации на сейсмической косе. Причем концевое тело, устройство контроля положения сейсмической косы и отводящий аппарат снабжены, по меньшей мере, одним рулем глубины служащим для управления в вертикальной и горизонтальной плоскостях. Дополнительно концевое тело снабжено приводным винтом. Сейсмическая коса выполнена с возможностью прохода ее, например, через устройства контроля положения сейсмических кос и отводящий аппарат, с возможностью фиксации на ней. Причем концевые тела, устройства контроля положения сейсмических кос и отводящий аппарат выполнены с возможностью управления через сейсмические косы при их фиксации на ней. Источник излучения звуковых волн представлен в виде, например, источника сейсмических колебаний, соединенный одним концом с буксировочным тросом, а другим концом с подводной лодкой. Причем источник сейсмических колебаний снабжен, по меньшей мере, одним рулем глубины для возможности управления в вертикальной и горизонтальной плоскостях и по меньшей мере, одним приводным винтом.
Сущность заявляемого устройства для подводной подледной сейсмической разведки поясняется чертежами, где:
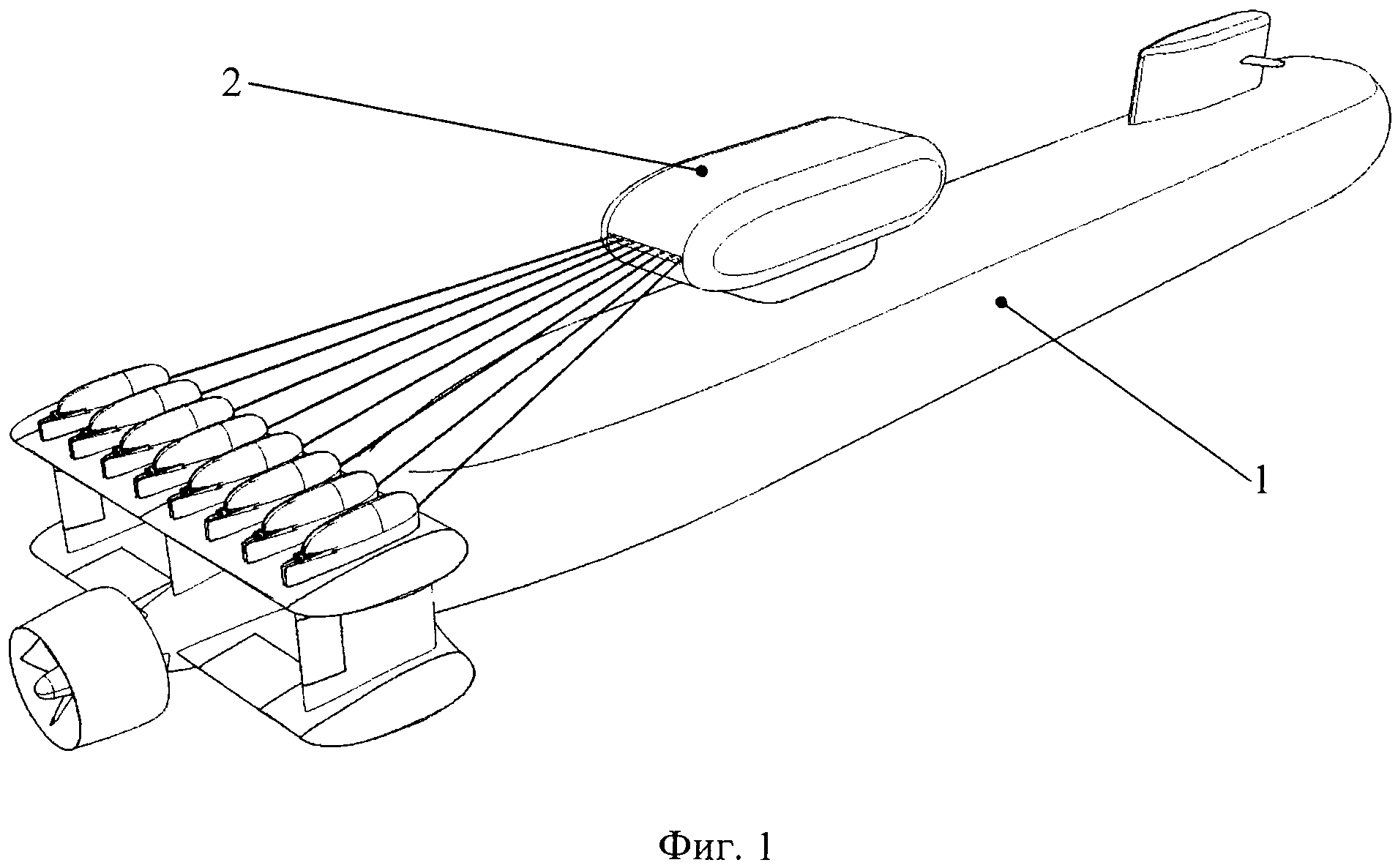
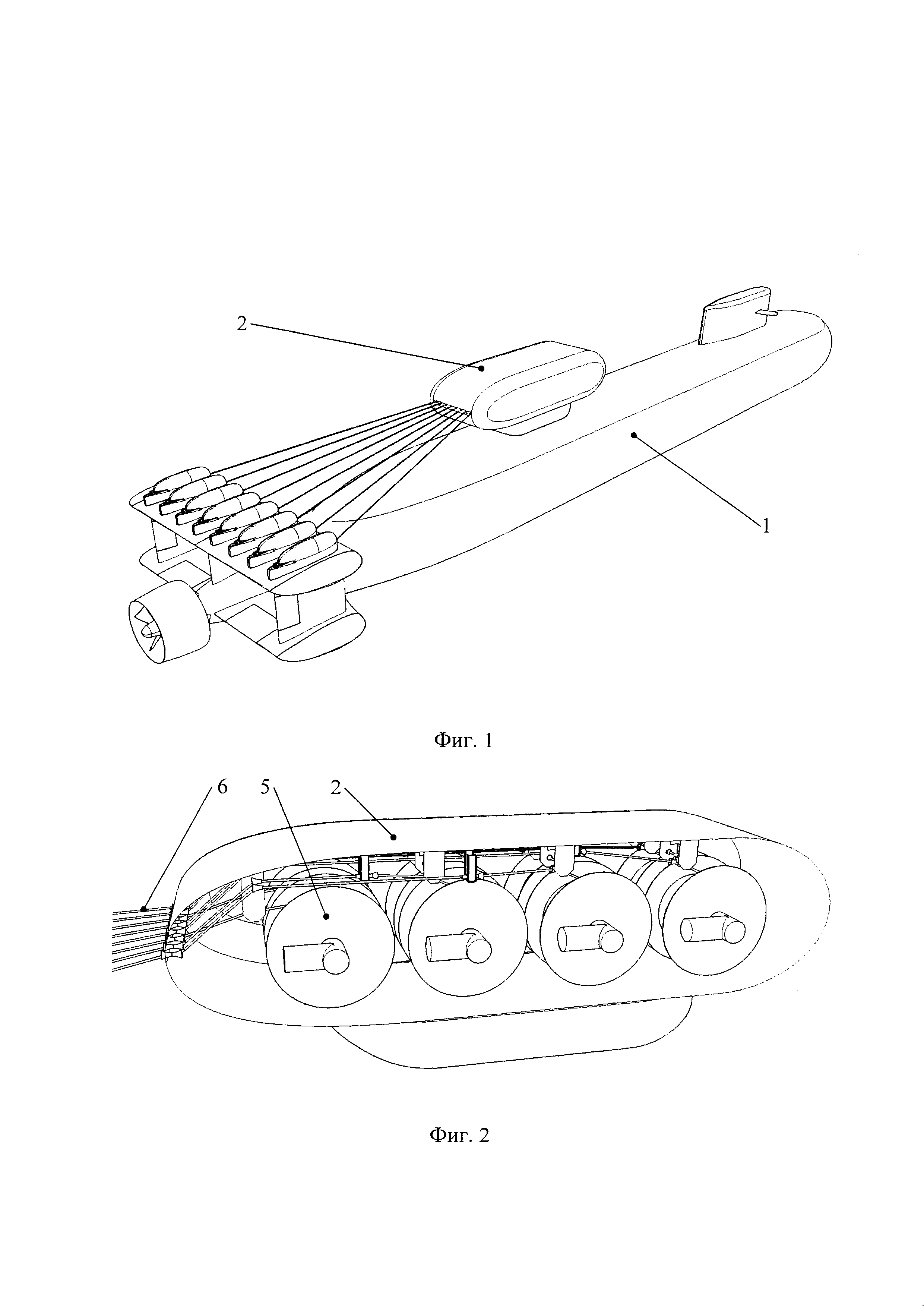
- на фиг. 1 изображен изометрический вид устройства для подводной подледной сейсмической разведки в сложенном состоянии;
- на фиг. 2 изображен изометрический вид контейнера с размещенными в нем лебедками, установленного на подводной лодке;
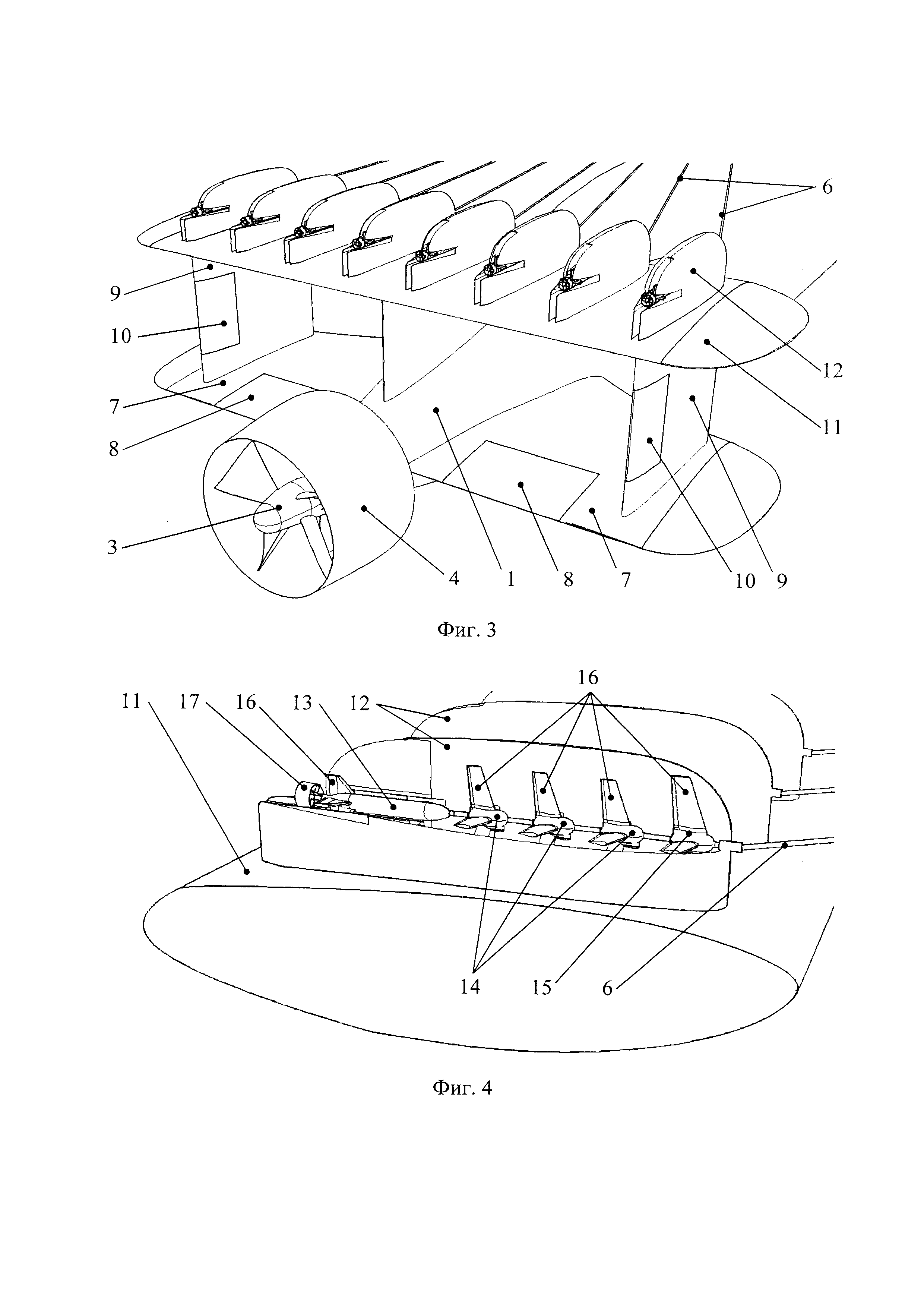
- на фиг. 3 изображен изометрический вид кормовой части подводной лодки с крыльями управления, обтекаемыми стойками и обтекаемой консолью с обтекаемыми надстройками;
- на фиг. 4 изображен изометрический вид размещения в обтекаемой надстройке концевого тела, устройств контроля положения сейсмических кос и отводящего аппарата;
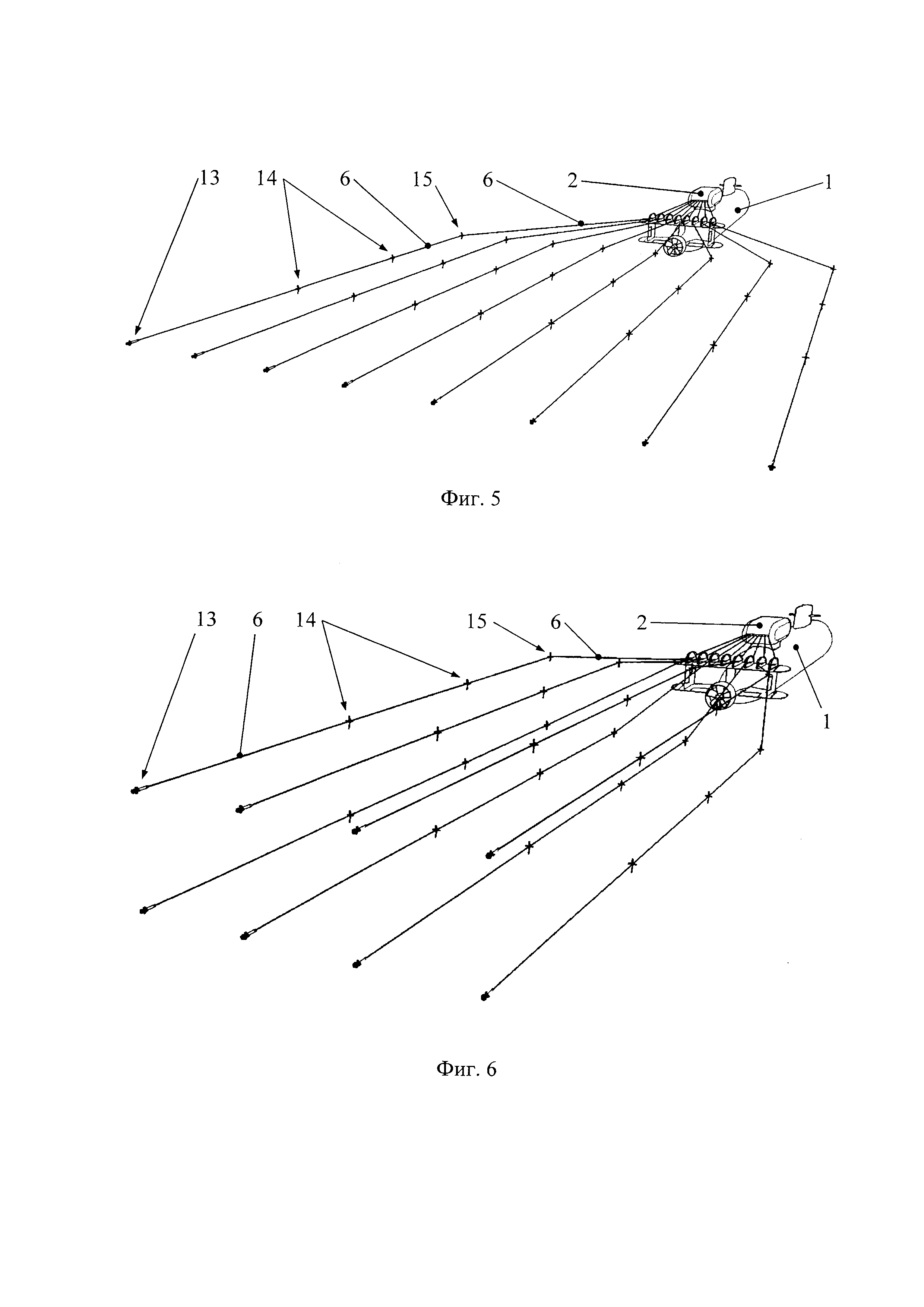
- на фиг. 5 изображен изометрический вид разложенного состояния устройства для подводной подледной сейсмической разведки, с вариантом буксировки сейсмических кос в горизонтальной плоскости;
- на фиг. 6 изображен изометрический вид разложенного состояния устройства для подводной подледной сейсмической разведки, с вариантом буксировки сейсмических кос в пространстве, одна над другой;
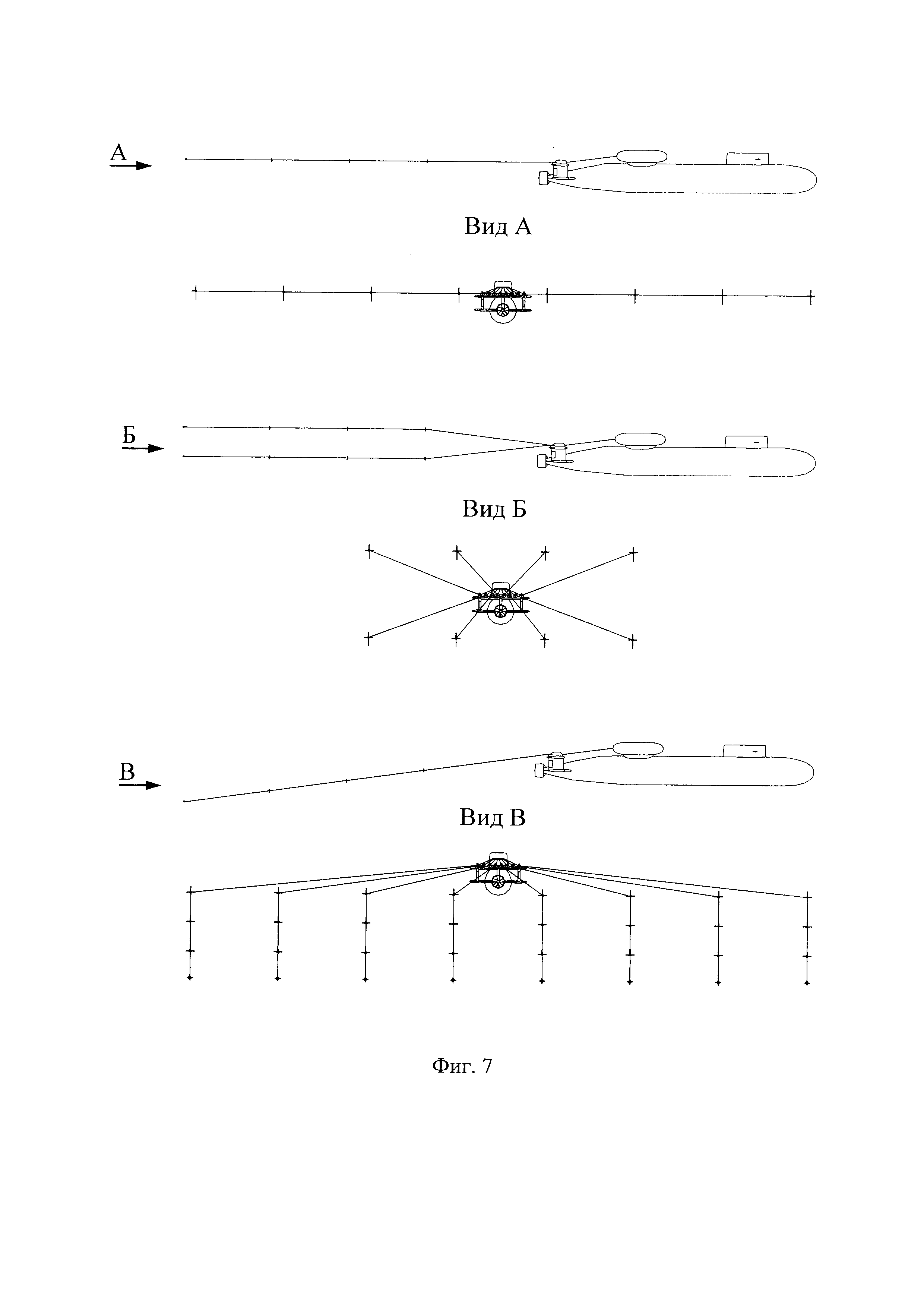
- на фиг. 7 изображена схема вариантов разложения устройства для подводной подледной сейсмической разведки в пространстве с учетом различных технологических решений в обеспечение различных способов расширения приема спектра сигнала (вид А - буксировка сейсмических кос в горизонтальной плоскости, вид Б - буксировка сейсмических кос одна над другой в горизонтальной плоскости, вид В - буксировка сейсмических кос в наклонном положении).
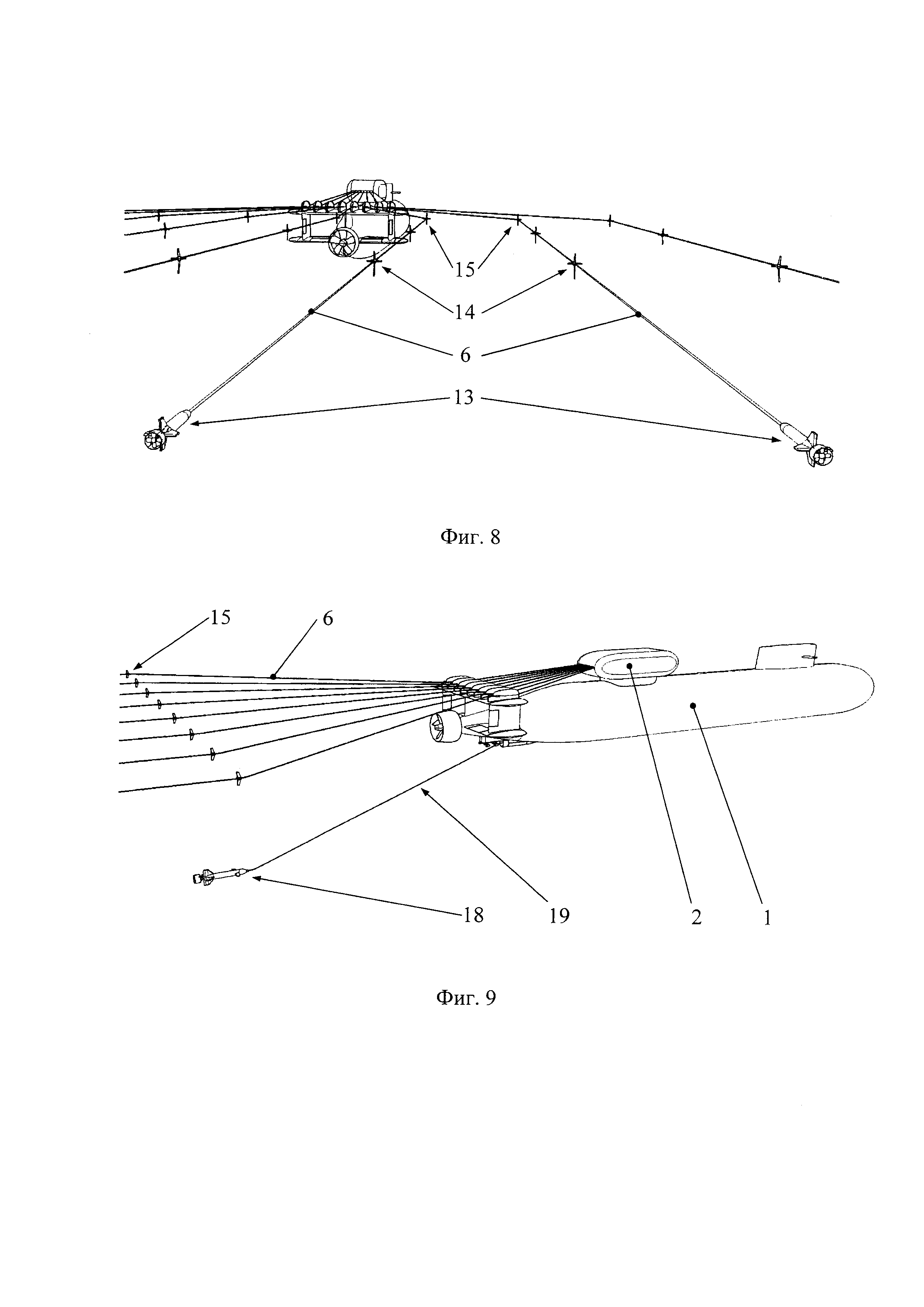
- на фиг. 8 изображен изометрический вид линий сейсмических кос с концевыми телами, устройствами контроля положения сейсмических кос и отводящими аппаратами, при буксировки сейсмических кос в горизонтальной плоскости;
- на фиг. 9 изображен изометрический вид разложенного состояния устройства для подводной подледной сейсмической разведки, с вариантом буксировки сейсмических кос в горизонтальной плоскости и источником сейсмических колебаний.
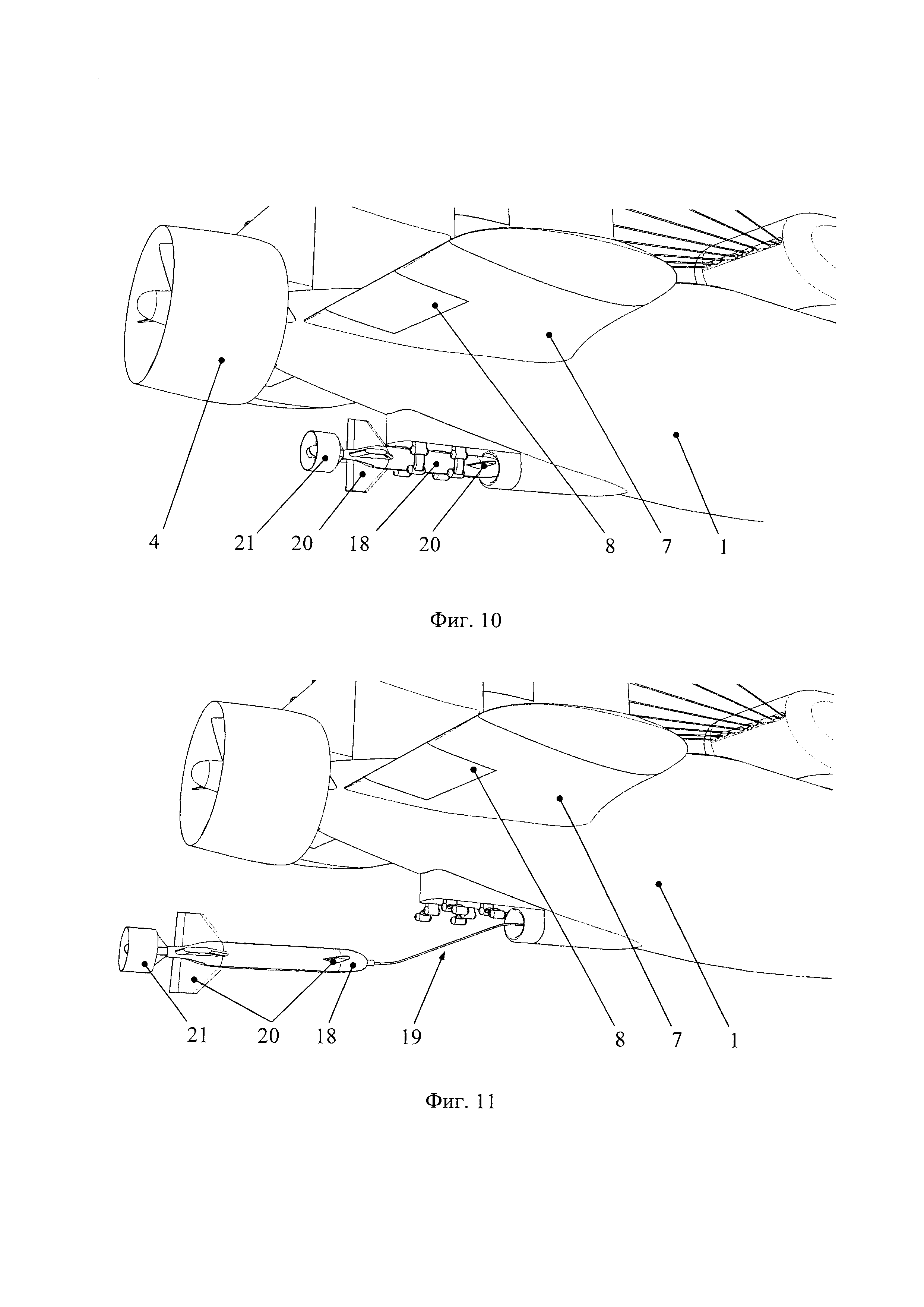
- на фиг. 10 изображен изометрический вид расположения источника сейсмических колебаний на подводной лодке.
- на фиг. 11 изображен изометрический вид выпускания источника сейсмических колебаний с подводной лодки.
Устройство для подводной подледной сейсмической разведки (фиг. 1) состоит из подводной лодки 1 снабженной контейнером 2, приводным винтом 3 который снабжен защитной насадкой 4. Причем в контейнере 2 размещена, по меньшей мере, одна лебедка 5. Габариты лебедки 5 зависят от длины, размещенной на ней сейсмической косы 6, длина которой многократно превышает длину подводной лодки 1. Крылья управления 7 подводной лодкой 1 с рулями глубины 8, снабжены, по меньшей мере, одной обтекаемой стойкой 9 с рулем поворота в горизонтальной плоскости 10, на которой размещена обтекаемая консоль 11 с по меньшей мере, одной обтекаемой надстройкой 12. Причем обтекаемая надстройка 12 снабжена, по меньшей мере, одним концевым телом 13, устройством контроля положения сейсмической косы 14 и отводящим аппаратом 15, где концевое тело 13, жестко соединено с сейсмической косой 6. Устройства контроля положения сейсмических кос 14 и отводящий аппарат 15 выполнены с возможностью фиксации на сейсмической косе 6, причем концевое тело 13, устройство контроля положения сейсмической косы 14 и отводящий аппарат 15 снабжены, по меньшей мере, одним рулем глубины 16 служащим для управления в вертикальной и горизонтальной плоскостях, а концевое тело 13 снабжено приводным винтом 17. Сейсмическая коса 6 выполнена с возможностью прохода ее, например, через устройства контроля положения сейсмических кос 14 и отводящий аппарат 15, с возможностью фиксации на ней. Причем концевые тела 13, устройства контроля положения сейсмических кос 14 и отводящий аппарат 15 выполнены с возможностью управления через сейсмические косы 6 при их фиксации на ней. Источник излучения звуковых волн представлен в виде, например, источника сейсмических колебаний 18 соединенный одним концом с буксировочным кабель-тросом 19, а другим концом с подводной лодкой 1. Причем источник сейсмических колебаний 18 снабжен, по меньшей мере, одним рулем глубины 20 для возможности управления в вертикальной и горизонтальной плоскостях и, по меньшей мере, одним приводным винтом 21.
Устройство для подводной подледной сейсмической разведки работает следующим образом:
Определяется технология и вариант автоматического развертывания сейсмических кос в пространстве в конкретном заданном районе сейсморазведки. Осуществляется транспортировка устройства для подводной подледной сейсмической разведки к месту проведения многомерной сейсмической разведки подводной лодкой.
Работа устройства для сейсмической разведки в целом происходит на малом ходу подводной лодки 1 и осуществляется с размотки сейсмической косы 6 с лебедки 5, размещенной в контейнере 2, установленном на подводной лодке 1. В момент начала размотки сейсмической косы 6, конец которой жестко соединен с концевым телом 13, размещенным в обтекаемой надстройке 12, концевое тело 13 выпускается из обтекаемой надстройки 12 набегающим потоком воды используя, свои рули глубины 16 и приводной винт 17, тем самым увлекая и держа в натяжении сейсмическую косу 6 через обтекаемую надстройку 12 с лебедки 5 из контейнера 2.
По мере вытягивания концевым телом 13 сейсмической косы 6 с лебедки 5, через заданное, технологией и вариантом автоматического развертывания сейсмических кос, расстояние, на сейсмическую косу 6 фиксируется устройство контроля положения сейсмической косы 14, при фиксации устройства контроля положения сейсмической косы 14 на сейсмическую косу 6 происходит кратковременная остановка разматывания сейсмической косы 6 с лебедки 5. Далее за счет непрерывного натяжения и вытягивания концевым телом 13 сейсмической косы 6, зафиксированное устройство контроля положения сейсмической косы 14 увлекается из обтекаемой надстройки 12. После вытягивания концевым телом 13 сейсмической косы 6 с первичным устройством контроля положения сейсмической косы 14, аналогично фиксируется последующее, на заданном расстоянии, и так далее, до вытягивания необходимой длины сейсмической косы 6 для исследования в заданном районе разведки, с последующей фиксацией отводящего аппарата 15 на сейсмической косе 6 аналогичным фиксации устройства контроля положения сейсмической косы 14.
В развернутом состоянии буксируемая за подводной лодкой 1 сейсмическая коса 6 с концевым телом 13 и зафиксированными на ней устройствами контроля положения сейсмических кос 14 и отводящим аппаратом 15, отводится в сторону отводящим аппаратом 15 занимая свое положение за подводной лодкой 1 в соответствии с заданной схемой буксировки сейсмических кос (фиг. 5, 6, 7).
Длина применения сейсмической косы 6, а также количество устройств контроля положения сейсмической косы 14 фиксируемых на ней, расстояние фиксации между концевым телом 13 и устройством контроля положения сейсмической косы 14; между устройствами контроля положения сейсмической косы 14, а также между устройством контроля положения сейсмической косы 14 и отводящим аппаратом 15 на сейсмической косе 6, определяется заранее и зависит от исследуемой площади, течения и запланированной траектории движении с учетом режима циркуляции подводной лодки 1 над исследуемой площадью морского дна.
Развертывание сейсмических кос 6 с концевыми телами 13, устройствами контроля положения сейсмических кос 14 и отводящими аппаратами 15 в целом, осуществляется последовательно, предпочтительно начиная от крайних обтекаемых надстроек 12 к центральным обтекаемым надстройкам 12 расположенных на обтекаемой консоли 11.
После развертывания необходимого количества сейсмических кос 6 за подводной лодкой 1, подводная лодка 1 выпускает источник сейсмических колебаний 18 на буксируемом кабель-тросе 19 через который осуществляется обеспечение работы по управлению источником сейсмических колебаний 18 и излучению сейсмических колебаний, для последующего приема спектра сигнала сейсмических колебаний сейсмическими косами 6 над исследуемой площадью. Управление источником сейсмических колебаний 18 в вертикальной и горизонтальной плоскостях осуществляется за счет рулей глубины 20 и приводного винта 21 (фиг. 9, 10, 11).
Стабилизация сейсмических кос 6 при буксировке в пространстве толщи воды, а также соответствии их заданной траектории движения за подводной лодкой 1, как прямолинейно, так и в режиме циркуляции, в соответствии со схемой буксировки над исследуемой площадью, осуществляется при помощи управления рулями концевых тел 13, устройств контроля положения сейсмических кос 14 и отводящих аппаратов 15 (фиг. 4, 8).
В процессе развертывания и буксировки, сейсмических кос 4, для маневрирования над исследуемой площадью морского дна подводная лодка 1 использует рули глубины 8 размещенные на крыльях управления 7 и рули поворота в горизонтальной плоскости 10, размещенные на обтекаемых стойках 9 (фиг. 3).
В обеспечение отсечения буксируемых сейсмических кос 6 при развертывании в большую приемную решетку приводной винт 3 подводной лодки 1 снабжен защитной насадкой 4 (фиг. 3).
В случае возможной остановки движения подводной лодки 1 во избежание запутывания и потери, сейсмических кос 6 с устройствами контроля положения сейсмических кос 14 и отводящими аппаратами 15 набегающим потоком, течением и так далее, включаются в работу концевые тела 13 обеспечивающие своими приводными винтами 17 натяжение от подводной лодки 1 и разводку сейсмических кос 6 между собой.
Принимаемый спектр сигнала сейсмических колебаний сейсмическими косами 6 обрабатывает записывающее устройство и связанная с ним аппаратура обработки сигнала на посту управления исследованиями подводной лодки 1, который не показан на фиг. 1-11.
Складывание устройства для подводной подледной сейсмической разведки после сейсмических исследований происходит, в целом, в порядке обратном развертыванию.
Эффективность устройства для подводной подледной сейсмической разведки будет достигнута за счет, применения его в проведении многомерной сейсмической разведки структуры недр с вероятными местами расположения ловушек, где могут находится углеводороды. В проведении автоматической развертки сейсмических кос за подводной лодкой с учетом технологических решений по компоновке сейсмических кос и буксировки их с возможностью различного постоянного расстояния между ними, не только в горизонте, но и в пространстве толщи воды, на всей протяженности сейсмических кос в независимости от их длин, для обеспечения различных способов расширения приема спектра сигнала. Тем самым исключении нестабильной курсовой устойчивости, запутывания, и как следствие, разрыва, отсечения буксируемых сейсмических кос, что может привести к потере всего буксируемого оборудования, а возможно и подводной лодки в акваториях, покрытых льдом круглогодично или большую часть года. Также данное изобретение позволит развернуть приемные сейсмические косы в большую приемную решетку, что приведет к сокращению времени необходимого для проведения многомерной сейсмической разведки и повысит эффективность работы такого устройства на больших исследуемых площадях.
А также такое устройство для подводной подледной сейсмической разведки позволит производить сейсморазведочные работы на акваториях, покрытых льдом круглогодично или большую часть года, тем самым, расширив районы подводной сейсмической разведки.
Крыло летательного аппарата с интегрированными солнечными панелями
Чувствительный элемент из пьезокомпозита связности 1-3 и способ его изготовления
Способ получения полиэфирсульфонов
Ароматический огнестойкий полиэфирэфиркетон и способ его получения
Композиция для получения паропроницаемой пористой мембраны
Устройство и способ для экспериментального изучения и расширения временных границ сверхглубокой гипотермии
Композиционный материал на основе полифениленсульфона и способ его получения
Способ криоконсервации биологических образцов под давлением и устройство для его осуществления
Ароматические сополиэфирсульфонкетоны и способ их получения
Вычислительный модуль и способ обработки с использованием такого модуля
Подводный буровой модуль
Способ для формования защитной трубы одновременно с бурением скважины и устройство для его осуществления
Способ подводной подледной сейсморазведки и устройство для его осуществления
Причальное устройство для приема/выпуска, хранения, транспортировки и удержания автономного необитаемого подводного аппарата в открытом море

