Результат интеллектуальной деятельности: Следящий электропривод с синхронным исполнительным двигателем
Вид РИД
Изобретение
Изобретение относится к области электротехники и может быть использовано в следящих электроприводах с синхронными исполнительными двигателями с постоянными магнитами на роторе.
Наиболее близким по технической сущности является следящий электропривод (см. патент России №2605948, опубл. 10.01.2017, бюл. №1), содержащий блок задания, интегральный регулятор, пропорциональный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, электродвигатель с исполнительным механизмом, датчик положения, блок дифференцирования, пропорциональное звено, сумматор, сумматор-вычитатель, два блока сравнения и мультиплексор.
Недостаток наиболее близкого по технической сущности следящего электропривода заключается в том, что при больших скоростях движения исполнительного механизма из-за инерционности цепи обмотки статора уменьшается угол нагрузки и момент, развиваемый синхронным исполнительным двигателем.
Технический результат достигается тем, что следящий электропривод с синхронным исполнительным двигателем, содержащий блок задания, интегральный регулятор, пропорциональный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, синхронный двигатель с исполнительным механизмом, датчик положения, блок дифференцирования, пропорциональное звено, первый сумматор, сумматор-вычитатель, первый и второй блоки сравнения, мультиплексор и датчик положения ротора, причем первый выход блока задания соединен с первым входом интегрального регулятора, выход которого соединен с первым входом пропорционального регулятора, выход пропорционального регулятора соединен с первым входом пропорционально-дифференциального регулятора, выход силового преобразователя соединен с синхронным двигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с вторыми входами интегрального и пропорционального регуляторов и входом блока дифференцирования, выход блока дифференцирования соединен с вторым входом пропорционально-дифференциального регулятора и входом пропорционального звена, выход которого соединен с первыми входами первого сумматора и сумматора-вычитателя, второй выход блока задания соединен с вторыми входами сумматора и сумматора-вычитателя, выход пропорционально-дифференциального регулятора соединен с первыми входами первого и второго блоков сравнения и мультиплексора, выход которого соединен с первым входом силового преобразователя, выход первого сумматора соединен с вторыми входами первого блока сравнения и мультиплексора, выход сумматора-вычитателя соединен с вторым входом второго блока сравнения и третьим входом мультиплексора, выход первого блока сравнения соединен с четвертым входом мультиплексора, выход второго блока сравнения соединен с пятым входом мультиплексора, а датчик положения ротора соединен с валом синхронного двигателя, дополнительно снабжен блоком вычисления угла упреждения и вторым сумматором, причем выход блока дифференцирования соединен с входом блока вычисления угла упреждения, выход которого соединен с первым входом второго сумматора, выход датчика положения ротора соединен с вторым входом второго сумматора, выход которого соединен с вторым входом силового преобразователя.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет поддерживать угол нагрузки близким к 90° и обеспечивать максимальный электромагнитный момент во всем скоростном диапазоне работы следящего электропривода с синхронным исполнительным двигателем.
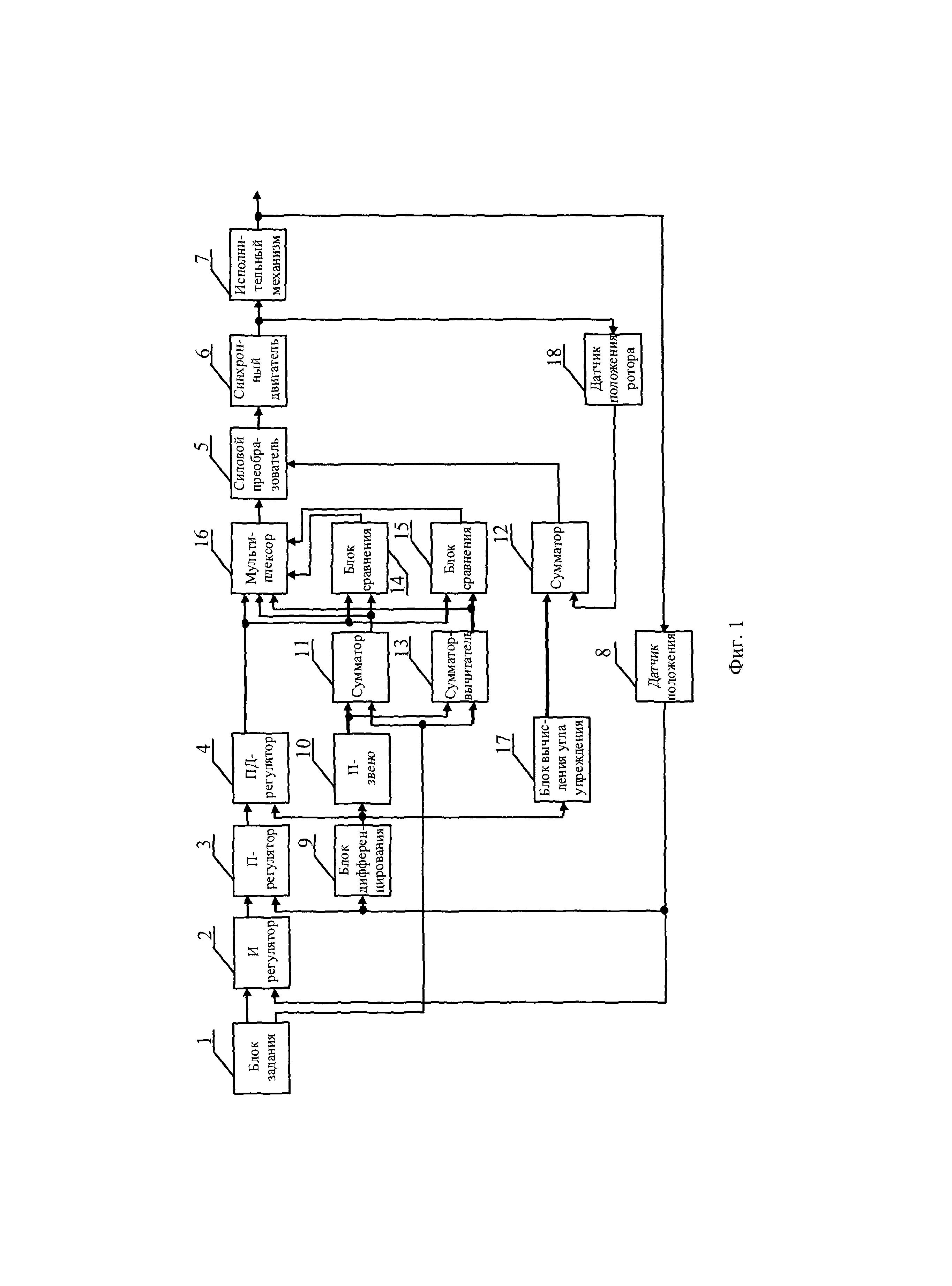
На фиг. 1 приведена функциональная схема следящего электропривода с синхронным исполнительным двигателем.
Следящий электропривод с синхронным исполнительным двигателем (фиг. 1) содержит блок 1 задания, интегральный регулятор 2, пропорциональный регулятор 3, пропорционально-дифференциальный регулятор 4, силовой преобразователь 5, синхронный двигатель 6 с исполнительным механизмом 7, датчик 8 положения, блок 9 дифференцирования, пропорциональное звено 10, сумматоры 11 и 12, сумматор-вычитатель 13, блоки 14 и 15 сравнения, мультиплексор 16, блок 17 вычисления угла упреждения и датчик 18 положения ротора.
Первый выход блока 1 задания соединен с первым (прямым) входом интегрального регулятора 2, выход которого соединен с первым входом пропорционального регулятора 3. Выход пропорционального регулятора 3 соединен с первым входом пропорционально-дифференциального регулятора 4. Выход силового преобразователя 5 соединен с синхронным двигателем 6, кинематически связанным с исполнительным механизмом 7, оснащенным датчиком 8 положения, выход которого соединен с вторыми (инверсными) входами интегрального и пропорционального регуляторов 2 и 3 и входом блока 9диффе-ренцирования. Выход блока 9 дифференцирования соединен с вторым входом пропорционально-дифференциального регулятора 4 и входом пропорционального звена 10, выход которого соединен с первыми входами сумматора 11 и сумматора-вычитателя 13. Второй выход блока 1 задания соединен с вторыми входами сумматора 11 и сумматора-вычитателя 13. Выход пропорционально-дифференциального регулятора 4 соединен с первыми входами блоков 14 и 15 сравнения и мультиплексора 16, выход которого соединен с первым входом силового преобразователя 5. Выход сумматора 11 соединен с вторыми входами блока 14 сравнения и мультиплексора 16. Выход сумматора-вычитателя 15 соединен с вторым входом блока 15 сравнения и третьим входом мультиплексора 16. Выход блока 14 сравнения соединен с четвертым входом мультиплексора 16. Выход блока 15 сравнения соединен с пятым входом мультиплексора 16. Датчик 18 положения ротора соединен с валом синхронного двигателя 6. Выход блока 9 дифференцирования соединен с входом блока 17 вычисления угла упреждения, выход которого соединен с первым входом сумматора 12. Выход датчика 18 положения ротора соединен с вторым входом сумматора 12, выход которого соединен с вторым входом силового преобразователя 5.
Блок 1 задания параметров может быть выполнен, например, на микросхемах К555ТМ8, разрядные входы которых подключаются с помощью переключателей к логическим нулям или единицам. Интегральный 2, пропорциональный 3, пропорционально-дифференциальный 4 регуляторы, блок 9 дифференцирования и пропорциональное звено 10 могут быть реализованы, например, по а.с. СССР №1649501, опубл. 15.05.91, бюл. №18 и выполнены, например, на микросхемах серии К555. Сумматоры 11 и 12, сумматор-вычитатель 13 и блоки 14 и 15 сравнения могут быть реализованы, например, на микросхемах К555ИМ6. Мультиплексор 16 может быть выполнен, например, на микросхемах К555КП12. Блок 17 вычисления угла упреждения может быть реализован, например, на микроконтроллере К1921ВК01Т, имеющем встроенные операции умножения, деления и математические библиотеки с вычислением тригонометрических функций. Силовой преобразователь 5 может быть реализован, например, в виде цифрового модулятора по патенту России №2517423, опубл. 27.05.14, бюл. №15, с силовым трехфазным транзисторным мостом на выходе.
8 качестве электродвигателя 6 может быть использована, например, любая синхронная машина с датчиком 18 положения ротора, например, 5FK70605AF71. Исполнительный механизм 7, например, может представлять собой стол координатно-расточного станка, соединенный с помощью ходового винта и муфты с валом синхронного электродвигателя 6. В качестве датчика 8 положения, например, может быть использована фотооптическая линейка BE 162 с соответствующим устройством оцифровки ее выходного сигнала.
Следует также отметить, что блок 1 задания параметров, интегральный 2, пропорциональный 3 пропорционально-дифференциальный 4 регуляторы, блок 9 дифференцирования, пропорциональное звено 10, сумматоры 11 и 12, сумматор-вычитатель 13, блоки 14 и 15 сравнения и мультиплексор 16 могут быть реализованы также программно на микропроцессорном контроллере.
Следящий электропривод работает следующим образом. В соответствии с величиной задающего сигнала, поступающего с первого выхода блока 1 задания, и сигнала датчика 8 положения интегральный регулятор 2 в совокупности с пропорциональным регулятором 3, блоком 9 дифференцирования и пропорционально-дифференциальным регулятором 4 формируют сигнал Nn∂ на первых входах мультиплексора 16 и блоков 14 и 15 сравнения. Одновременно на выходе пропорционального звена 10 формируется сигнал  характеризующий ЭДС вращения, наводимую в электродвигателе и приведенную ко входу силового преобразователя 5. Этот сигнал подается на первые входы сумматора 11 и сумматора-вычитателя 13. С второго выхода блока 1 задания на вторые входы сумматора 11 и сумматора-вычитателя 13 в случае применения синхронной машины, работающей в режиме бесколлекторного двигателя постоянного тока подается сигнал
характеризующий ЭДС вращения, наводимую в электродвигателе и приведенную ко входу силового преобразователя 5. Этот сигнал подается на первые входы сумматора 11 и сумматора-вычитателя 13. С второго выхода блока 1 задания на вторые входы сумматора 11 и сумматора-вычитателя 13 в случае применения синхронной машины, работающей в режиме бесколлекторного двигателя постоянного тока подается сигнал  пропорциональный максимально допустимому падению напряжения на активном сопротивлении R1 статорной обмотки под действием максимально допустимого тока I1max. При этом на выходе сумматора 11 получается сигнал
пропорциональный максимально допустимому падению напряжения на активном сопротивлении R1 статорной обмотки под действием максимально допустимого тока I1max. При этом на выходе сумматора 11 получается сигнал  а на выходе сумматора-вычитателя 13 -
а на выходе сумматора-вычитателя 13 -  Выходной сигнал Nn∂ пропорционально-дифференциального регулятора 4 каждый такт вычислений сравнивается со значениями
Выходной сигнал Nn∂ пропорционально-дифференциального регулятора 4 каждый такт вычислений сравнивается со значениями  и
и  получаемыми на выходах сумматора 11 и сумматора-вычитателя 13. Если
получаемыми на выходах сумматора 11 и сумматора-вычитателя 13. Если  то через мультиплексор 16 на вход силового преобразователя 5 проходит сигнал Nn∂. В случае, когда
то через мультиплексор 16 на вход силового преобразователя 5 проходит сигнал Nn∂. В случае, когда  на вход силового преобразователя 5 подается цифровой код равный
на вход силового преобразователя 5 подается цифровой код равный  При
При  через мультиплексор 16 проходит сигнал
через мультиплексор 16 проходит сигнал  Силовой преобразователь 5 преобразует поступающий на него сигнал в напряжение на статоре синхронного двигателя 6. При этом вал электродвигателя начинает вращаться и приводит в движение исполнительный механизм 7, перемещение которого измеряется датчиком 8 положения. Движение продолжается до тех пор, пока величина сигнала с датчика 8 положения не сравняется с величиной задающего сигнала, поступающего с первого выхода блока 1 задания. При этом действия, производимые с помощью блоков 9-11, 13-16, позволяют ограничить ток в статорной обмотке синхронного электродвигателя 6 на уровне I1max.
Силовой преобразователь 5 преобразует поступающий на него сигнал в напряжение на статоре синхронного двигателя 6. При этом вал электродвигателя начинает вращаться и приводит в движение исполнительный механизм 7, перемещение которого измеряется датчиком 8 положения. Движение продолжается до тех пор, пока величина сигнала с датчика 8 положения не сравняется с величиной задающего сигнала, поступающего с первого выхода блока 1 задания. При этом действия, производимые с помощью блоков 9-11, 13-16, позволяют ограничить ток в статорной обмотке синхронного электродвигателя 6 на уровне I1max.
Одновременно с действием всех перечисленных выше боков и элементов следящего электропривода блок 17 осуществляет вычисление угла упреждения, например, по формуле

где ω - скорость вращения ротора синхронного двигателя, пропорциональная сигналу с выхода блока 9 дифференцирования; T1 - электромагнитная постоянная времени цепи обмотки статора; Zn - число пар полюсов двигателя; knp - коэффициент приведения к дискретам датчика 18 положения ротора. Сумматор 12 производит вычисление угла

где θр - угол поворота ротора синхронного электродвигателя, измеряемый с помощью датчика 18 положения ротора.
Угол θ подается на второй вход силового преобразователя 5, который формирует трехфазную систему напряжений на статорных обмотках синхронного двигателя с учетом этого угла. В результате результирующий вектор потокосцепления статора синхронного двигателя всегда опережает вектор потокосцепления ротора на угол 90° (в сторону движения), обеспечивая максимальный момент двигателя во всех скоростных режимах.
Таким образом, предлагаемый следящий электропривод позволяет поддерживать угол нагрузки близким к 90° и обеспечивать максимальный электромагнитный момент во всем скоростном диапазоне работы следящего электропривода с синхронным исполнительным двигателем.
Следящий электропривод с синхронным исполнительным двигателем, содержащий блок задания, интегральный регулятор, пропорциональный регулятор, пропорционально-дифференциальный регулятор, силовой преобразователь, синхронный двигатель с исполнительным механизмом, датчик положения, блок дифференцирования, пропорциональное звено, первый сумматор, сумматор-вычитатель, первый и второй блоки сравнения, мультиплексор и датчик положения ротора, причем первый выход блока задания соединен с первым входом интегрального регулятора, выход которого соединен с первым входом пропорционального регулятора, выход пропорционального регулятора соединен с первым входом пропорционально-дифференциального регулятора, выход силового преобразователя соединен с синхронным двигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен со вторыми входами интегрального и пропорционального регуляторов и входом блока дифференцирования, выход блока дифференцирования соединен со вторым входом пропорционально-дифференциального регулятора и входом пропорционального звена, выход которого соединен с первыми входами первого сумматора и сумматора-вычитателя, второй выход блока задания соединен со вторыми входами сумматора и сумматора-вычитателя, выход пропорционально-дифференциального регулятора соединен с первыми входами первого и второго блоков сравнения и мультиплексора, выход которого соединен с первым входом силового преобразователя, выход первого сумматора соединен со вторыми входами первого блока сравнения и мультиплексора, выход сумматора-вычитателя соединен со вторым входом второго блока сравнения и третьим входом мультиплексора, выход первого блока сравнения соединен с четвертым входом мультиплексора, выход второго блока сравнения соединен с пятым входом мультиплексора, а датчик положения ротора соединен с валом синхронного двигателя, отличающийся тем, что он дополнительно снабжен блоком вычисления угла упреждения и вторым сумматором, причем выход блока дифференцирования соединен с входом блока вычисления угла упреждения, выход которого соединен с первым входом второго сумматора, выход датчика положения ротора соединен со вторым входом второго сумматора, выход которого соединен со вторым входом силового преобразователя.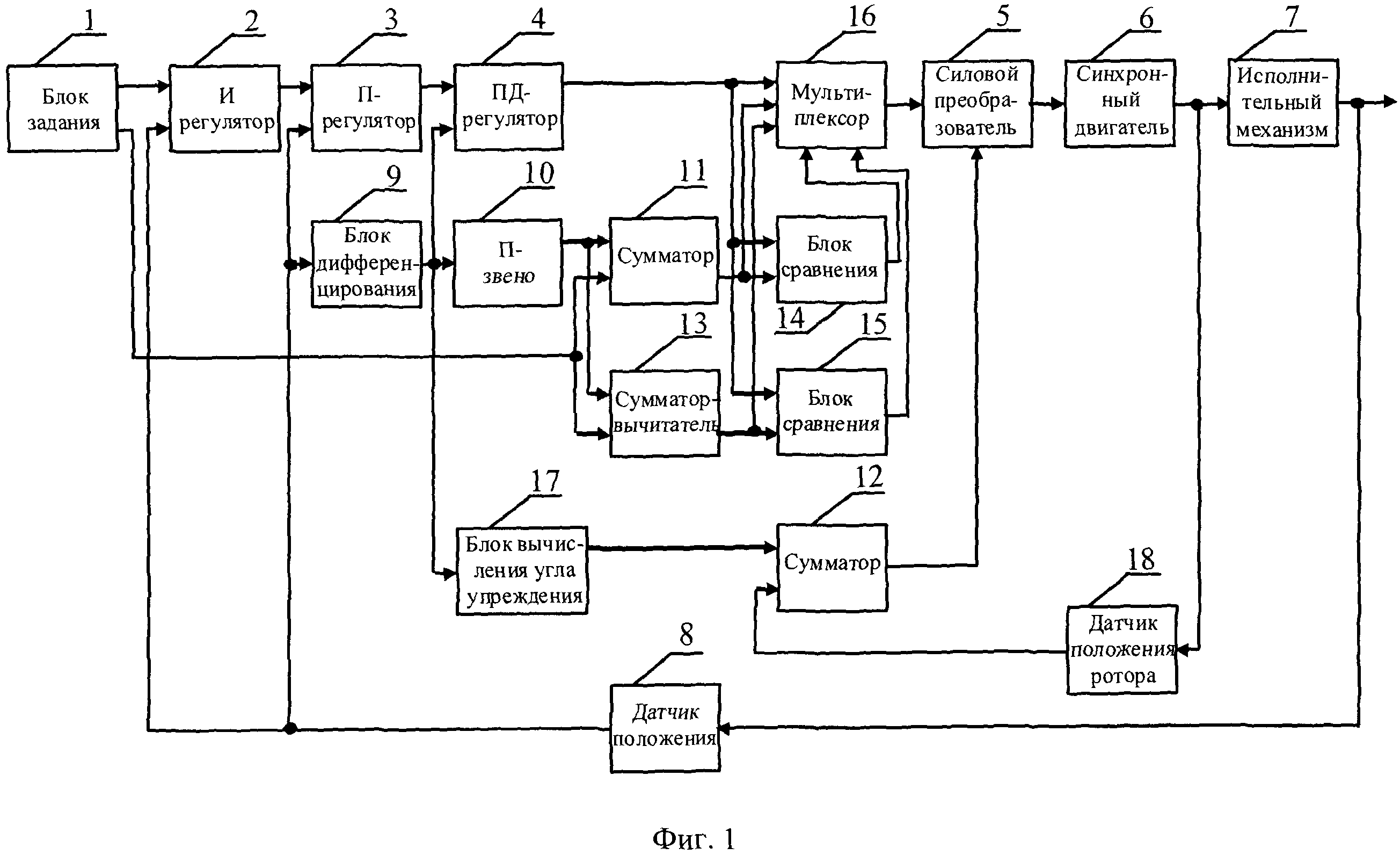
Узел соединения элементов из круглых труб
Способ нанесения реакционноспособного композиционного покрытия на основе ni-al
Смеси ароматических углеводородов, содержащие c-c-циклы, как жидкий органический носитель водорода и водородный цикл на его основе
Способ определения чувствительности к механическим воздействиям высокоэнергетических веществ
Смеси азоторганических соединений, содержащих ароматические c-c-циклы, как жидкий органический носитель водорода и водородный цикл на его основе
Способ получения водородсодержащего газа
Способ изготовления виброизолятора с управляемой жесткостью
Парогазовая установка электростанции
Способ изготовления металлодеревянной балки
Адаптивный виброизолятор для виброакустической защиты промышленного оборудования и трубопроводов
Следящий электропривод
Следящий электропривод с асинхронным исполнительным двигателем
Цифровой модулятор для преобразования частоты
Цифровой модулятор для управления синхронным двигателем
Цифровой интегральный регулятор
Цифровой модулятор для преобразователя частоты

