Результат интеллектуальной деятельности: СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ регулирования движения поездов [Патент №2652319, Способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры, Полевой Ю.И., Горелик А.В. Опубл. 25.07.2018. Бюл. №21], основанный на контроле состояний путевых участков посредством рельсовых цепей и передачи информации на подвижной состав, ток сигнальной частоты от путевого генератора со станции приема пропускают по первой кабельной линии поочередно ко всем рельсовым цепям, посредством второй кабельной линии также поочередно ко всем рельсовым цепям подключают путевой приемник, с выхода которого информация о состоянии всех блок-участков поочередно поступает на станционную ЭВМ на посту электрической централизации, посредством которой затем формируют и передают по цифровому радиоканалу на локомотивы информацию о количестве свободных блок-участков, а также информацию о номере пути приема на локомотивы поездов, которые подходят к станции приема, благодаря чему на локомотивных навигаторах появляется информация, если в память локомотивной ЭВМ введена информация о плане и профиле пути, путевом развитии станции, весе и длине поезда, параметрах локомотива, посредством которой осуществляется в автоматическом или ручном режиме поддержание допустимой скорости движения поезда.
Недостатком способа является то, что он не позволяет определить и поддерживать оптимальную скорость движения с учетом фактически складывающейся поездной ситуации
Известен способ регулирования движения поездов [Патент №2662313, Способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры, Полевой Ю.И., Горелик А.В. Опубл. 25.07.2018. Бюл. №21], системой автоблокировки с централизованным размещением аппаратуры, основанный на контроле состояний рельсовых линий, передаче на подвижной состав информации о количестве свободных впередилежащих рельсовых линий и параметрах маршрута приема, напряжение сигнальной частоты от транспортного модуля непрерывно подается в первую линейную цепь для осуществления питания через согласующие устройства в попарно соединенные рельсовые линии в интервалы времени, отведенные для контроля этих линий, к другим концам, которые также через согласующие устройства посредством второй и третьей линейных цепей подключаются путевые приемники на постах ЭЦ, в следующие временные интервалы контролируются другие пары рельсовых линий, временные интервалы задаются с помощью тактовых генераторов с кварцевой стабилизацией делителей частоты и счетчиков тактов, синхронизация которых осуществляется сигналами цикловой синхронизации, которые формируются в четвертой линейной цепи, в качестве таких сигналов используются кратковременные интервалы между длительными интервалами подачи питания на линейные установки, сигналы цикловой синхронизации формируется в транспортабельном модуле сразу на два направления, подключение напряжения сигнальной частоты к первой линии происходит в транспортабельном модуле, там же формируется и синхроинтервал, подключение согласующих элементов к первой, второй и третьей линейным цепям осуществляется в линейных установках посредством электронных ключей, которые управляются счетными схемами, в которые входят тактовые генераторы, делители частоты и счетчики, входы которых подсоединены к электронным ключам так, чтобы обеспечить поочередный контроль состояний всех рельсовых цепей, на входы путевых приемником на постах ЭЦ поступают аналоговые сигналы, которые затем передаются в ЭВМ поста ЭЦ для обработки по алгоритму работы адаптивной рельсовой цепи, фазы сигналов на входах путевых приемников в смежных промежутках времени отличаются на 180° для того, чтобы снизить влияние инерционности фильтров, этому же способствует сокращение длительности стробирующего импульса, передаваемого от ЭВМ на путевой приемник, это улучшает условия приема сигнала путевыми приборами при неполной синхронизации работы счетчиков на посту ЭЦ и линейных установках, полученная информация о состоянии рельсовых линий обрабатывается программой ЭВМ и совместно с информацией о номере пути приема, по радиоканалу передается на подвижной состав, находящийся в зоне управления ЭВМ постов ЭЦ, зоной управления является участок от середины одного перегона до середины другого с расширением его в обе стороны на расстояние тормозного пути, расстояние, соответствующее времени восприятия сигнала, подготовки к торможению, инерционности действия тормозов, с подвижного состава на посты ЭЦ ближайших станций поступает информация о координате головы подвижного состава, на подвижном составе с учетом принятой информации по радиоканалам с постов ЭЦ, а также информации хранящейся в памяти подвижного состава о параметрах пути, путевого развития станций и поезда с помощью ЭВМ определяется допустимая и оптимальная скорость движения подвижного состава для каждой точки пути и выводится на экран локомотивного навигатора в виде кривых скоростей с отметками мест контроля бдительности, подготовки к торможению, начала торможения и места остановки, а также выводятся на экран рекомендуемые позиции локомотивного контроллера и крана машиниста, при реализации функции автоведения, рекомендованные позиции органов управления устанавливаются посредством механических устройств управления скоростью движения подвижного состава, вся информация записывается в «черный ящик» для последующего анализа при сбое в регулировании скорости подвижного состава, а также для реализации функции самообучения: во время движения поезда машинист контролирует совпадение рекомендованной и фактической скорости движения.
Недостатком способа является то, что он не позволяет определить и поддерживать оптимальную скорость движения с учетом фактически складывающейся поездной ситуации
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является расширение функциональных возможностей системы, повышение безопасности движения поездов, повышение надежности действия устройств автоматики и телемеханики, снижение затрат на строительство и эксплуатацию станционных и локомотивных устройств регулирования движения поездов, повышение пропускной способности, снижение затрат на электроэнергию на тягу поездов, повышение точности выполнения графика движения поездов, снижение износа подвижного состава и верхнего строения пути.
Технический результат достигается тем, что способ регулирования движения поездов с помощью сигналов, которые передают информацию с постов ЭЦ станций по радиоканалам на локомотивы о состоянии впередилежащих перегонных и станционных участках, на каждой станции осуществляется контроль состояний путевых участков половины перегонов прилегающих к станции, положениях замкнутых маршрутных стрелок, локомотивные ЭВМ на основании принятой информации, а также информации хранящейся в памяти локомотивной ЭВМ о путевом развитии станций, параметрах пути и поезда определяет допустимую скорость движения для каждой точки пути и выводит на экран локомотивного пульта-табло кривую скорости, место остановки локомотива, а также номера позиций локомотивного контроллера и крана машиниста, позиции органов управления устанавливаются посредством устройств управления и контроля краном машиниста и локомотивного контроллера, вся информация записывается в «черный ящик» для последующего анализа при сбое в регулировании движения, а также для реализации функции самообучения: во время движения поезда машинист контролирует совпадение оптимальной и фактической скорости движения; с локомотивов на посты ЭЦ ближайших станций по радиоканалам передается информация о координате места нахождения локомотива, которая определяется с помощью ГЛОНАСС, отличающийся тем, что на каждой станции контролируется состояние путевых участков каждой половины перегона прилегающего к станции, каждый пост ЭЦ по радиоканалу, с участием одной радиостанции, связан с локомотивными радиостанциями, находящимися в зоне связи, которая находится между осью предыдущей и осью последующей станции, каждый локомотив с участием одной радиостанции связан с постом ЭЦ впередилежащей станции с участием другой - с постом ЭЦ позади лежащей станции, при проходе локомотивом оси станции происходит прерывание радиосвязи с постом ЭЦ позади лежащей станции и установка радиосвязи с постом ЭЦ впереди лежащей, установка радиосвязи осуществляется по запросу с локомотива после дачи согласия с поста ЭЦ впереди лежащей станции, при этом локомотивная радиостанция участвует в конференцсвязи в момент времени, установленный станционной ЭВМ, который соответствует системному номеру поезда, каждый поезд, находящийся в зоне связи с постом ЭЦ, обменивается информацией со станцией в интервал времени, отведенный для этого поезда, кроме того, предусмотрен интервал времени для передачи с поста ЭЦ на локомотив информации необходимой для безопасного ведения всех поездов, находящихся зоне связи, каждый локомотив с помощью двух радиостанций обменивается информацией с двумя постами ЭЦ смежных станций, что позволяет осуществлять безопасное управление скоростью поезда и регулирование движения поезда с соблюдением времени прохода поездов контрольных точек (контрольными точками являются: хвост впереди идущего поезда, граница станции, граница приемоотправочного пути, середина перегона), которое рассчитывается ЭВМ диспетчерского круга, с учетом фактически складывающейся поездной ситуации, и передается на станции по линейным цепям, а затем на локомотивы по радиоканалам, совокупность выше перечисленных интервалов времени обмена информации по радиоканалу между локомотивами и постами ЭЦ составляет цикл обмена информацией, который заканчивается интервалом продолжительностью 1-2 с, который служит сигналом цикловой синхронизации.
Краткое описание чертежей
На фиг. 1 представлены: путевой план с зонами контроля путевых участков и связи; на фиг. 2 - путевой план с кривыми скорости; на фиг. 3 - фрагмент локомотивного пульта-табло; на фиг 4 - структурная схема устройства для демонстрации способа регулирования движения поездов; на фиг. 5 - структура сигналов, передаваемых с локомотивов на станции и со станций на локомотивы.
Описание изобретения
На фиг. 1, 2 и 4 приведены числовые обозначения:
1, 2 и 3 - станции В, Б и А соответственно;
4 и 5 - перегоны между станциями В и Б, Б и А соответственно;
6, 7, 8, 9 и 10 - поезда П1, П2, П3, П4 и П5 соответственно.
11 - центральная ЭВМ - ЭВМЦ;
12 - ЭВМ управлений дорог - ЭВМД;
13 - ЭВМ диспетчерских кругов - ЭВМК;
14, 15, 16 и 17 - станционные ЭВМ - ЭВМС;
18, 19, 20 и 21- локомотивные ЭВМ - ЭВМЛ;
22, 23, 24 и 25 - приемники ГЛОНАСС - ПГ;
26, 27, 28 и 29 - устройства управления и контроля локомотивным контроллером и краном машиниста УУКЛККМ.
На фиг. 5 приведены буквенно-числовые и буквенные обозначения:
1T, 2Т, 3Т …, (N-1)T, NT, (N+1)T и (N+2)T - такты в цикле кодовых посылок, передаваемых сигналов с локомотива на станцию и со станции на локомотив;
КЛ1, КЛ2, …, КЛN - координаты локомотивов с системными номерами поездов, которые соответствуют тактам 1, 2, … N;
ЗП - запрос на подключение;
ВП КТ1, КТ2, КТ3 - время проследования поездом контрольных точек КТ1, КТ2, КТ3 (контрольные точки находятся перед самим поездом);
РП+СН - разрешение на подключение и системный номер, который присваивается поезду.
Посылки представлены на фиг. 5 для передачи сигналов с локомотивов на станции (Л>С) и со станций на локомотивы (C>Л) и сформированы следующим образом:
КЛ - состоит из двух чисел: первое обозначает системный номер станции (5 бит - 32 станции), второе - расстояние от станции до фактического местонахождения локомотива (10 бит - выбирают на участке 20 км координату с точностью до 20 м);
ВП КТ1, КТ2, КТ3 - состоит из трех чисел: первое КТ1 обозначает время хода от момента восприятия сигнала до первой контрольной точке в минутах, второе КТ2 - время хода между первой и второй контрольными точками, третье КТ3 - время хода между второй и третьей контрольными точками (5 бит + 5 бит + 5 бит), каждое из которых не превышает 32 минут.
Посылки, приведенные в такте (N+2)T, формируются по принципу сигналов с безопасными отказами (ответственные приказы), остальные посылки могут и не удовлетворять этому требованию.
Ответственные приказы о состоянии путевых участках и положениях стрелок формируются с участием микропроцессорной централизации МПЦ (на фиг. 1-5 не показана), станционной электронно-вычислительной машины ЭВМС (пункты 14-17) и локомотивной электронно-вычислительной машины ЭВМЛ (пункты 18-21).
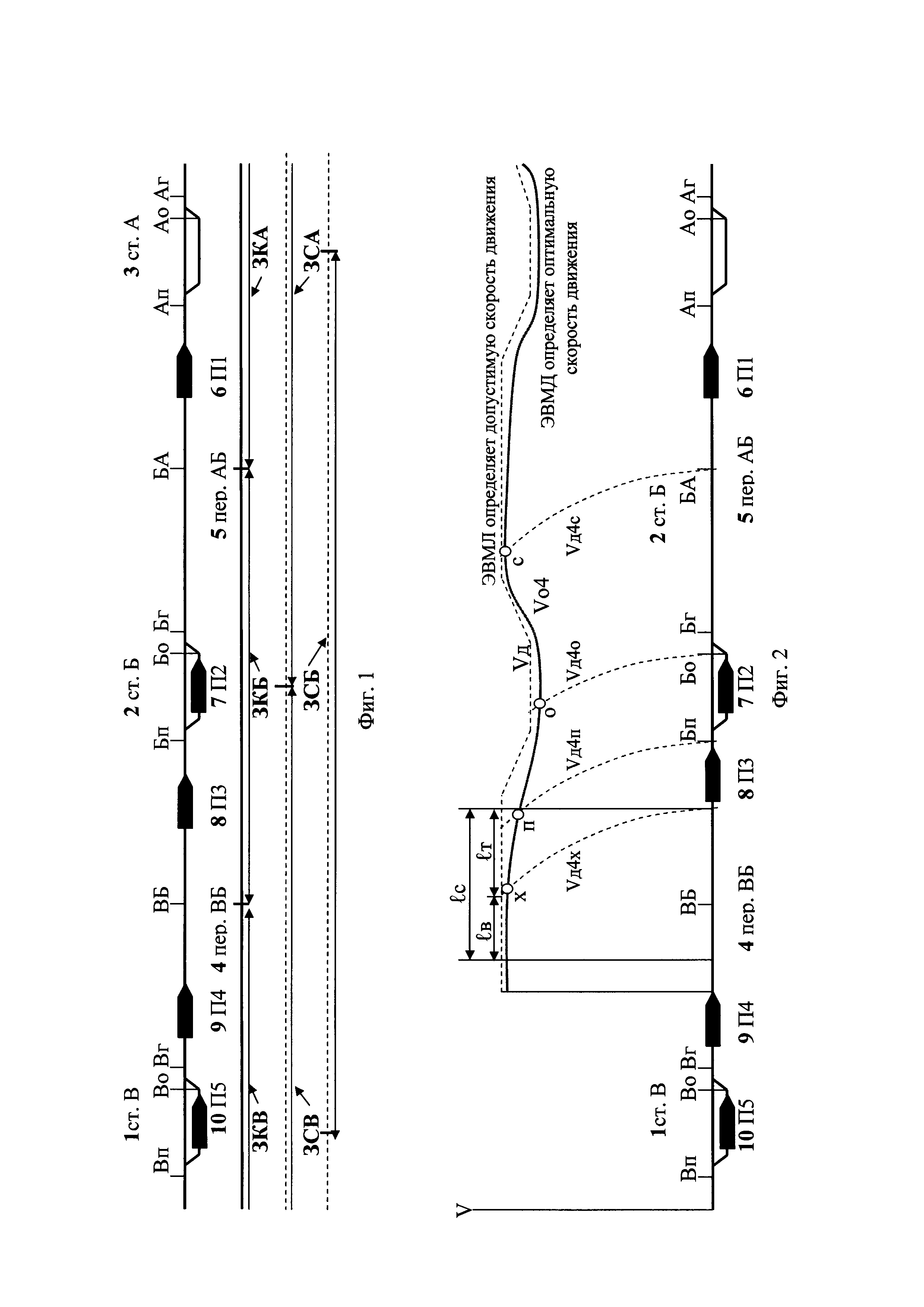
На фиг. 1 и 2 приведены дополнительно следующие обозначения объектов:
Ап, Бп и Вп - границы станций соответственно А, Б и В со стороны нечетных горловин (слева);
Аг, Бг и Вг - границы станций со стороны четных горловин;
Аг, Бг и Br - границы приемоотправочных путей со стороны четных горловин (справа);
ВБ и БА - середины перегонов (границы рельсовых цепей, контроль состояний которых осуществляется с разных прилегающих к перегону станций);
ЗКА, 3КБ и ЗКВ - зоны контроля рельсовых цепей, аппаратура которых находится на ст. А, Б и С соответственно;
ЗСА, ЗСБ и ЗСВ - зоны связи локомотивных радиостанций РСЛ со станционными радиостанциями РСС, которые размещаются на ст. А, Б и С соответственно;
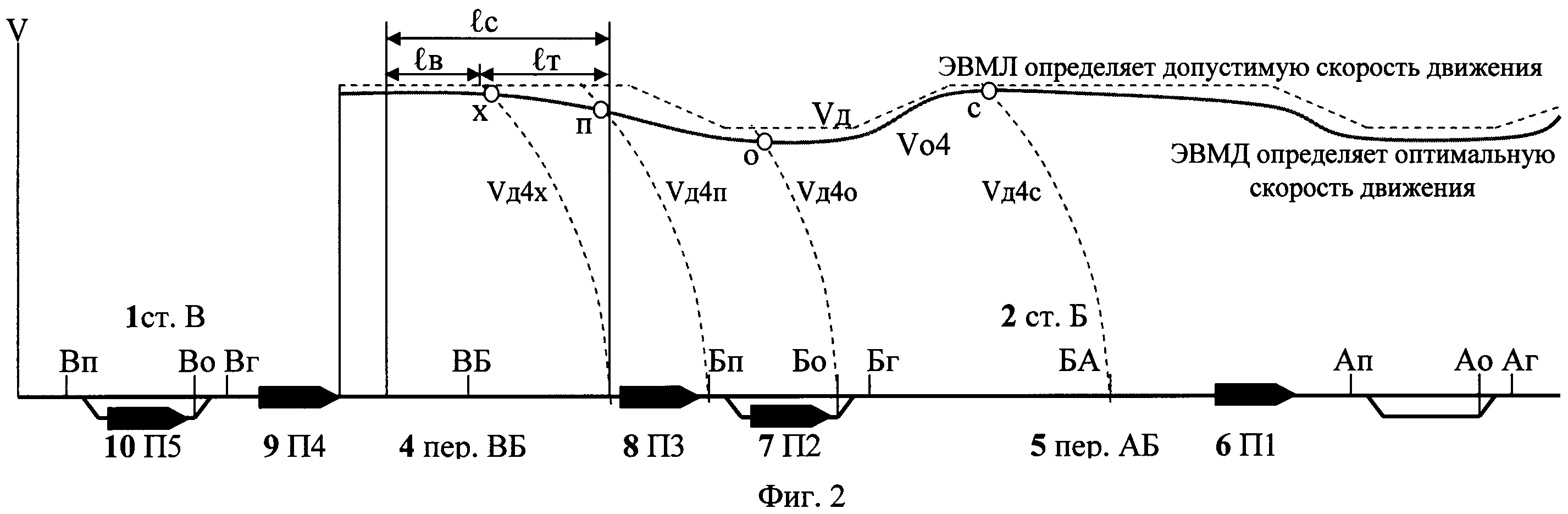
 в - длина участка (соответствует времени хода) восприятия препятствия (подвижной состав, граница станции, граница приемоотправочного пути, середина перегона);
в - длина участка (соответствует времени хода) восприятия препятствия (подвижной состав, граница станции, граница приемоотправочного пути, середина перегона);
т - длина участка торможения перед препятствием;
с - длина свободного участка перед поездом, соответствующая скорости движения;
Vo4 - оптимальная скорость поезда 9 П4 при условии отсутствия помех для движения;
Vд4 - допустимая скорость поезда 9 П4 при условии отсутствия помех для движения;
Vд4х, Vд4п, Vд4о и Vд4с - кривые торможения перед хвостом впередиидущего поезда (х - хвост), перед границей станции (п - прием), перед границей приемоотправочного пути (о - отправление); перед серединой перегона (с - середина).
Путевые участки ЗКА, 3КБ и ЗКВ являются зонами контроля рельсовых цепей прилегающих половин перегонов, примыкающих к станциям А, Б и В;
Участки ЗСА, ЗСБ и ЗСВ являются зонами связи локомотивных радиостанций РСЛ со станционными радиостанциями РСС, которые размещаются на ст. А, Б и С соответственно.
Движение поезда осуществляется в соответствии с кривой скорости Vo, а при ее пересечении с кривой Vд4 или одной из кривых торможения Vд4х, Vд4п, Vд4о или Vд4 с скорость движения снижается в соответствии с упомянутыми кривыми. Точки пересечения обозначены буквами: х - хвост, п - прием (место установки входного светофора, в заявленном светофоры не предусматриваются), о - отправление (место установки выходного светофора), с - середина перегона.
Информация на локомотивную ЭВМ - ЭВМЛ (фиг. 4, пункты 18-21) о времени прохода или остановки головы поезда у впередилежащей контрольной точке поступает по радиоканалам. Контрольными точками являются хвост впереди идущего поезда, граница станции или приемоотправочного пути, середина перегона. Для остановки головы поезда в контрольных точках необходимо начать торможение в точках на кривой скорости х, п, о и с соответственно. Необходимость в середине перегона вызвана необходимостью определения скорости выхода поезда на перегон, если примыкающая к станции половина перегона свободна.
Все кривые скорости рассчитываются локомотивной ЭВМЛ (фиг. 4, пункты 18, 19, 20 и 21) с учетом параметров поезда и пути, которые хранятся в памяти ЭВМЛ, и информации получаемой по радиоканалу от станционных ЭВМС (пункты 14, 15, 16 и 17) о времени подхода или проследования поезда контрольных точек, количестве свободных рельсовых цепей и номере пути приема или отправления.
Информацию о количестве свободных рельсовых цепей перед поездом и номер пути приема и отправления формируется станционной ЭВМС (пункты 14, 15, 16 и 17) с помощью устройств контроля состояний путевых участков и устройств МПЦ (на фиг. 1-5 не представлены), а также получаемой информации от ЭВМ диспетчерских кругов - ЭВМК (фиг. 4, пункт 13).
Информация о времени прохода контрольных точек формируется ЭВМК (пункт 13), передается по линиям связи на станции, а затем по радиоканалам - на локомотивные ЭВМЛ (пункты 18-21).
Локомотивные ЭВМЛ (пункты 18-21), с помощью полученной информации со станционных ЭВМС рассчитывают кривые скорости и с участием локомотивных устройств регулирования скорости (устройства управления и контроля краном машиниста и локомотивным контроллером УУККМЛК - пункты 26-29) поддерживают оптимальную скорость. Эта же ЭВМЛ (пункты 18-21) контролирует соответствие между допустимой и оптимальной скоростями. Такую же контрольную функцию возлагают и на машиниста поезда.
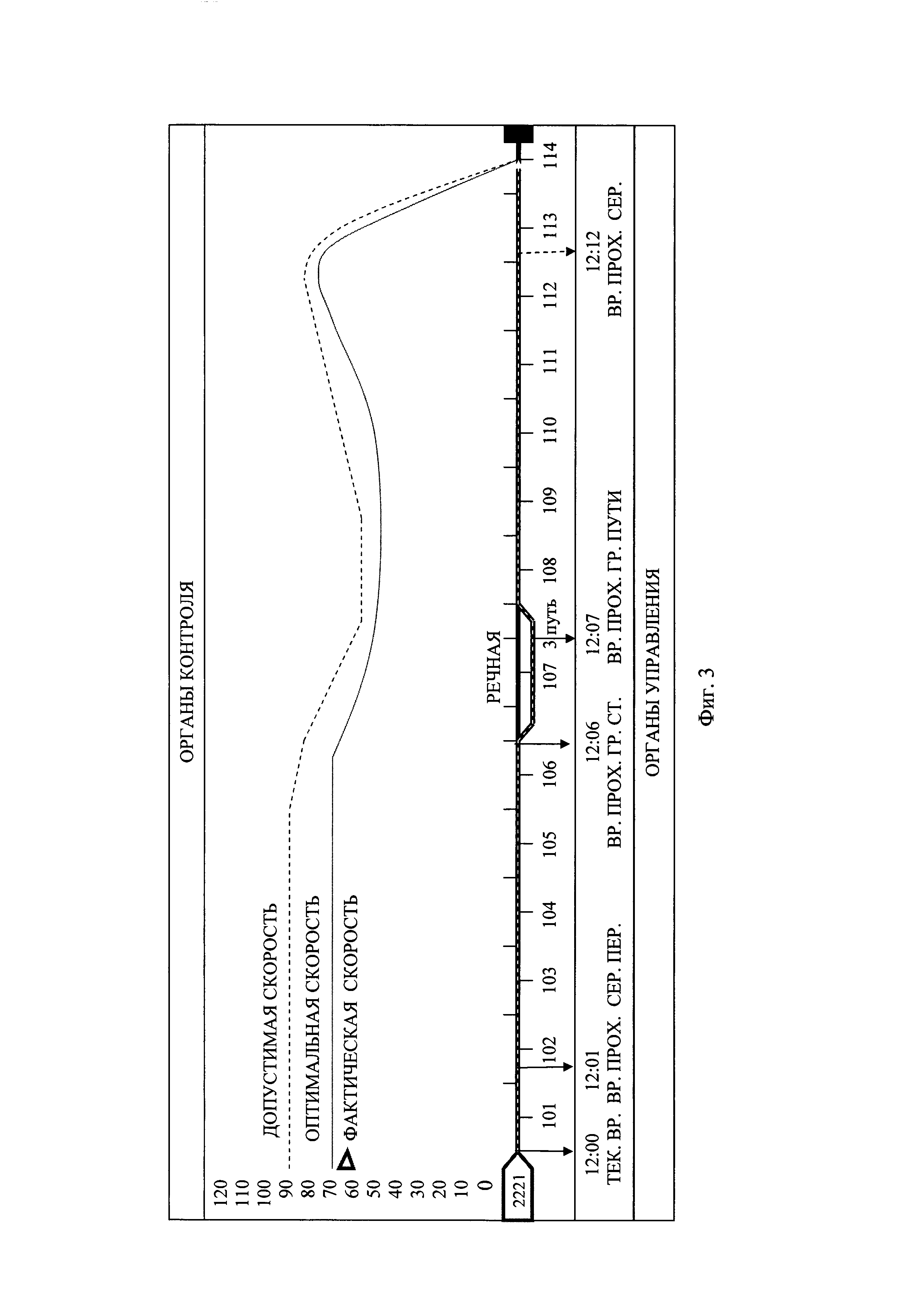
На фиг. 3 представлен фрагмент локомотивного пульта-табло с кривыми допустимой (безопасной) скорости, оптимальной скорости и указателем фактической скорости. Также показана шкала скорости, и километровые отметки с указанием текущего времени и времени прохода контрольных точек (12:00 - текущее время; 12:01 - время прохода середины перегона; 12:06 - время прохода границы станции; 12:07 - время прохода границы пути; 12:12 - время прохода середины пути). Последняя метка (12:12 - время прохода середины перегона) будет отображена после прохода локомотивом поезда №2222 середины предыдущего перегона.
На фиг. 4 представлена структурная схема устройства для демонстрации способа регулирования движения поездов. Все передвижения происходят под контролем и при участии центральной ЭВМ - ЭВМЦ (пункт 11), которая связана двухсторонними связями с дорожными ЭВМ - ЭВМД (пункт 12), которые связаны двухсторонними связями с ЭВМ диспетчерских кругов - ЭВМК (пункт 13), которые связана двухсторонними связями со станционными ЭВМ - ЭВМС (пункты 18-21), которые связаны двухсторонними связями с локомотивными ЭВМ - ЭВМЛ (пункты 18-21). Локомотивные ЭВМЛ связаны по радиоканалам со станционными ЭВМС (пункты 14-17), и с учетом информации с этих ЭВМС, а также ЭВМ диспетчерских кругов ЭВМК (пункт 13) осуществляют расчет допустимой и оптимальной кривых скоростей, а также моменты прохода контрольных точек и выдают информацию на экран локомотивного пульта-табло (фиг. 3). Вместе с тем локомотивные ЭВМЛ (фиг. 4, пункты 18-21) рассчитывают позиции крана машиниста и локомотивного контроллера для управления этими органами управления через устройства УУККМЛК (пункты 26-29), с целью поддержания оптимальной скоростью движения поезда.
По радиоканалам с локомотивов передается информацию на посты ЭЦ о местонахождении головы поезда, которая определяется с помощью приемника ГЛОНАС ПГ (фиг. 4, пункты 22-25).
На фиг. 5 представлена структура сигналов, передаваемых с локомотивов на станции и со станций на локомотивы. На станции блоками (информации) КЛ с локомотивов передается информация о координате места нахождения локомотивов, и блоком ЗП осуществляется запрос на подключение локомотивной радиостанции к конференцсвязи со станционной радиостанцией. На каждом локомотиве предусмотрены по две радиостанции, которые обеспечивают связь с двумя ближайшими к локомотиву поезда станционными радиостанциями. Запрос на подключении передается на впереди лежащую станцию, когда он проходит ось предыдущей станции. В это же время локомотивная радиостанция отключается от радиостанции предыдущей ж.д. станции. Такой принцип построения связи позволяет осуществить непрерывную (циклическую) передачу информацию на локомотив о состоянии впереди лежащих перегонных и станционных участках, о номере пути приема и пути. Кроме того, на локомотив передается информация о времени хода локомотива между контрольными точками, что позволяет определить момент прохода или остановки поезда в этой точки. Вся информация выводится на экран локомотивного пульта-табло.
Организация связи локомотивных и станционных ЭВМ по радиоканалу осуществляется с участием двух локомотивных радиостанций РСЛ1 и РСЛ2 (на фиг. 1-5 не представлены), одна из которых связана со станционной радиостанцией предыдущей ж.д. станции, другая - со станционной радиостанцией впереди лежащей ж. д. станции. Все переключения радиостанций происходят тогда, когда локомотив пересекает ось станции, на которой он находится. При этом с участием станционной радиостанции РСС (на фиг. 1-5 не представлены), впередилежащей станционной ЭВМ - ЭВМС (14-17) локомотиву (фиг. 4, для ЭВМЛ пункты 18-21) по запросу (ЗП, фиг. 5) присваивается системный номер (СН), который определяет интервал времени связи внутри цикла связи. В каждом цикле станционная радиостанция обменивается информацией с локомотивной радиостанцией. Причем, временные параметры передаются на локомотивы в блоках ВП, каждый из которых предназначен для одного локомотива. Параметры путевых участков и номера путей приема и отправления для всех локомотивов передаются в блоке, который соответствует такту (N+2)T.
В процессе обмена информации между локомотивной - ЭВМЛ (фиг. 4, пункты 18-21) и станционной - ЭВМС (пункты 14-17) требуется передать большой объем информации. Каждый локомотив в блоке КЛ должен сообщить о координате своего местонахождения, а при необходимости послать запрос на подключение к конференцсвязи со станционной ЭВМС через РСС (пункты 14-17). Подключение к конференцсвязи осуществляется по протоколу соединения локомотивной и станционной радиостанцией, а координата в блоке КЛ передается двумя посылками (фиг. 5).
Каждая станция должна передать информацию в блоках ВП (фиг. 5) о времени прохода трех впереди лежащих контрольных точек с точностью 1 мин. Для сокращения времени передачи информации приняты следующие принципы построения приказов. Информация в блоке КЛ передается двумя посылками 5 и 10 бит, где первая посылка указывает на условный номер станции (всего 32 номера), а вторая - соответствует расстоянию от станции до локомотива (на перегоне 20 км определяет координата локомотива с точностью 20 м).
В блоках ВП передается информация о количестве минут времени хода между тремя контрольными точками. Блок ВП содержит три посылки по 5 бит, что позволяет передать информацию о времени хода между контрольными точками от 0 до 32 мин.
В блоке ответственного приказав (такт (N+2)T) в случае, который отражен во фрагменте пульта-табло (фиг. 3), передается на локомотив (фиг. 5) 5 посылок с количеством бит: 10, 5, 2, 2 и 10, которые передают информацию о количестве свободных 500 м участков перед станцией, номере пути приема, состоянии приемоотправочного пути, номере пути отправления и количестве 500 м участков за станцией соответственно.
Таким образом, локомотивная ЭВМ - ЭВМЛ (пункты 18-21) рассчитывает кривые допустимой и оптимальной скорости и посредством устройства управления и контроля локомотивным контроллером и краном машиниста УУКЛККМ (22, 23, 24 и 25) поддерживает оптимальную скорость движения поезда, посредством локомотивного пульта-табло информирует машиниста о допустимой и оптимальной скорости движения, а также о фактической скорости движения и отслеживает соответствие допустимой и оптимальной скоростей. Локомотивная ЭВМ - ЭВМЛ (пункты 18-21) контролирует соответствие фактической и оптимальной скоростей, и в случае их несоответствия посредством устройства УУКЛККМ (22, 23, 24 и 25) воздействует на кран машиниста и локомотивный контроллер (на фиг. 1-5 не представлены) с целью регулирования фактической скорости. Машинист также отслеживает соответствие скоростей и может в любой момент времени вмешаться в процесс управления движения поездом.
Способ регулирования движения поездов с помощью сигналов, которые передают информацию с постов ЭЦ станций по радиоканалам на локомотивы о состоянии впередилежащих перегонных и станционных участках, на каждой станции осуществляется контроль состояний путевых участков половины перегонов прилегающих к станции, положениях замкнутых маршрутных стрелок, локомотивные ЭВМ на основании принятой информации, а также информации, хранящейся в памяти локомотивной ЭВМ о путевом развитии станций, параметрах пути и поезда, определяет допустимую скорость движения для каждой точки пути и выводит на экран локомотивного пульта-табло кривую скорости, место остановки локомотива, а также номера позиций локомотивного контроллера и крана машиниста, позиции органов управления устанавливаются посредством устройств управления и контроля краном машиниста и локомотивного контроллера, вся информация записывается в «черный ящик» для последующего анализа при сбое в регулировании движения, а также для реализации функции самообучения: во время движения поезда, машинист контролирует совпадение оптимальной и фактической скорости движения; с локомотивов на посты ЭЦ ближайших станций по радиоканалам передается информация о координате места нахождения локомотива, которая определяется с помощью ГЛОНАСС, отличающийся тем, что на каждой станции контролируется состояние путевых участков каждой половины перегона прилегающего к станции, каждый пост ЭЦ по радиоканалу, с участием одной радиостанции, связан с локомотивными радиостанциями, находящимися в зоне связи, которая находится между осью предыдущей и осью последующей станции, каждый локомотив с участием одной радиостанции связан с постом ЭЦ впередилежащей станции с участием другой - с постом ЭЦ позадилежащей станции, при проходе локомотивом оси станции происходит прерывание радиосвязи с постом ЭЦ позадилежащей станции и установка радиосвязи с постом ЭЦ впередилежащей, установка радиосвязи осуществляется по запросу с локомотива после дачи согласия с поста ЭЦ впередилежащей станции, при этом локомотивная радиостанция участвует в конференцсвязи в момент времени, установленный станционной ЭВМ, который соответствует системному номеру поезда, каждый поезд, находящийся в зоне связи с постом ЭЦ, обменивается информацией со станцией в интервал времени, отведенный для этого поезда, кроме того, предусмотрен интервал времени для передачи с поста ЭЦ на локомотив информации необходимой для безопасного ведения всех поездов, находящихся зоне связи, каждый локомотив с помощью двух радиостанций обменивается информацией с двумя постами ЭЦ смежных станций, что позволяет осуществлять безопасное управление скоростью поезда и регулирование движения поезда с соблюдением времени прохода поездов контрольных точек - хвост впереди идущего поезда, граница станции, граница приемо-отправочного пути, середина перегона, которое рассчитывается ЭВМ диспетчерского круга, с учетом фактически складывающейся поездной ситуации, и передается на станции по линейным цепям, а затем на локомотивы по радиоканалам, совокупность вышеперечисленных интервалов времени обмена информации по радиоканалу между локомотивами и постами ЭЦ составляет цикл обмена информацией, который заканчивается интервалом продолжительностью 1-2 с, который служит сигналом цикловой синхронизации.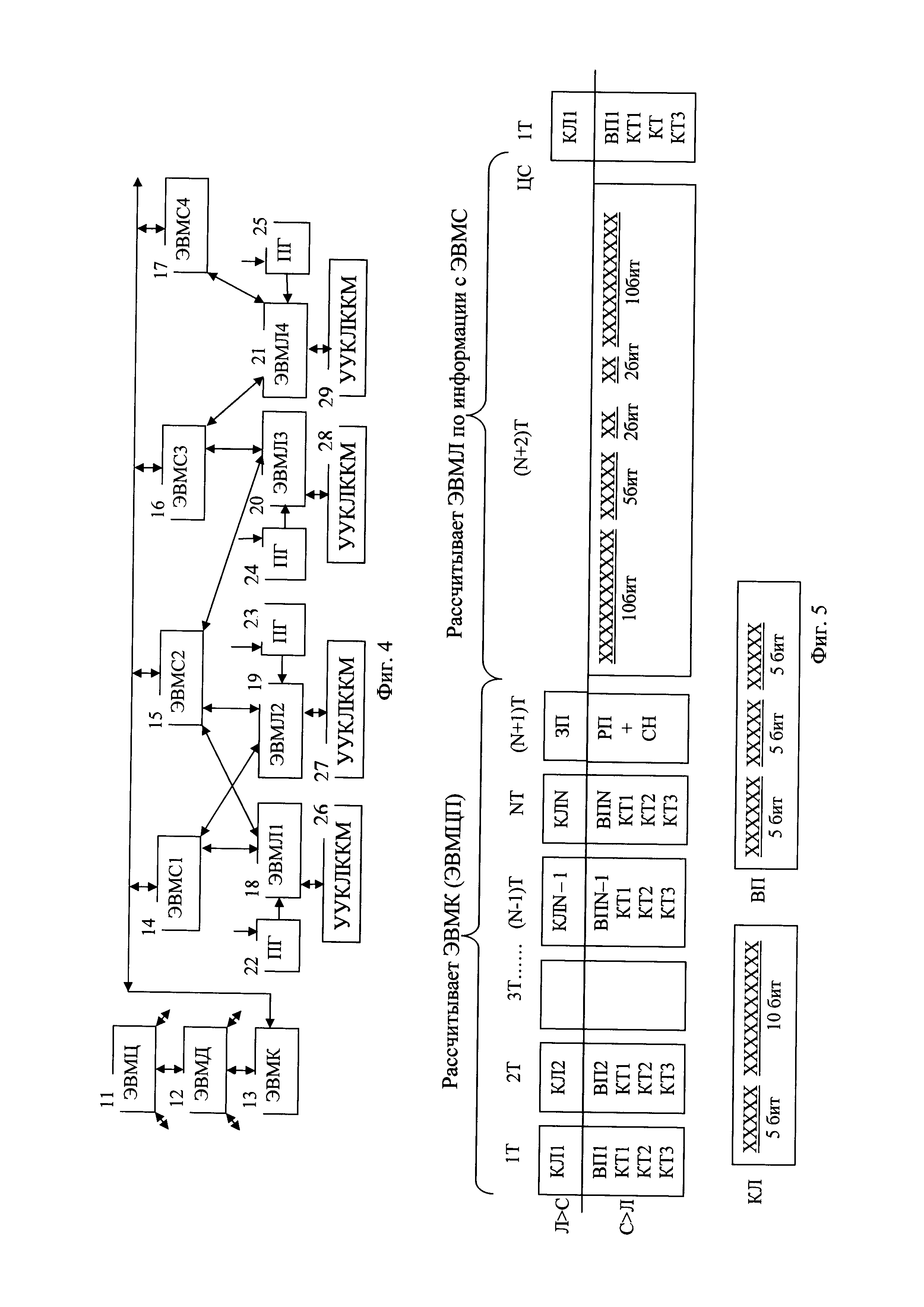
Устройство контроля следования поезда в полном составе
Способ стрельбы из винтовки
Система дистанционного управления самозарядной винтовкой
Дистанционная система управления морскими минами
Способ и устройство контроля целостности рельсовых нитей
Способ автоматического наведения орудия на цель
Способ регулирования движения поездов
Способ и устройство передачи информации на локомотив с помощью шлейфа
Устройство контроля следования поезда в полном составе
Способ стрельбы из винтовки
Способ контроля состояний путевого участка на станциях и перегонах
Способ регулирования движения поездов на железнодорожном транспорте
Способ отображения информации на локомотиве для контроля за движением поезда
Способ контроля состояний разветвленной рельсовой цепи в горловинах станции
Способ регулирования движения поездов и маневровых составов
Способ автоматического регулирования скорости движения поездов на участке сближения с препятствием

