Результат интеллектуальной деятельности: Комбинированная многоканальная головка самонаведения
Вид РИД
Изобретение
Предлагаемое изобретение относится к авиационной технике, в частности, к оптоэлектронным головкам самонаведения (ГСН), используемым в малогабаритных авиационных средствах поражения, запускаемых с беспилотных летательных аппаратов или боевых вертолетов.
Известна комплексная головка самонаведения (варианты) (см. патент РФ на изобретение №2483273, М.кл. F41G 7/22, опубл. 27.05.2013 г.), содержащая по первому варианту оптическую и инфракрасную цифровые фотокамеры, блок порогового пропускания сигнала оптической фотокамеры, блок выключения инфракрасных пикселей, электронный ключ и линию задержки, прибор ночного видения, сигнал с которого поступает на специализированный компьютер системы управления, где с заданной степенью достоверности сравнивается с имеющимися в памяти компьютера всеракурсными изображениями всех известных самолетов, и после идентификации типа самолета компьютер определяет заранее заданное разрешение или запрещение поражения цели, причем на цели выбирается заранее запрограммированное наиболее уязвимое место, и дальнейшее наведение осуществляется в это место по показаниям прибора ночного видения.
При этом прибор ночного видения имеет диапазон автоматической регулировки усиления, позволяющий различать цели и днем.
Компьютер имеет программу сравнения двух или более соседних кадров прибора ночного видения с удалением элементов изображения, не совпадающих на этих кадрах.
В данной ГСН идентификация целей осуществляется только по контуру самолета. Причем если цель не идентифицирована с заданной достоверностью ни с одним из имеющихся в памяти компьютера самолетов, то она поступает в разряд разрешенных к поражению.
Компьютер имеет следующую программу: если цель идентифицируется как свой или гражданский самолет, то компьютером подается команда на изменение направления полета и осуществляется самостоятельный поиск цели путем отклонения головки, или осуществляется перенацеливание на одну из целей, математические модели которых имеются в памяти компьютера.
Кроме того, компьютер имеет следующую программу: если включилось управление по прибору ночного видения, то компьютер отключает систему переноса точки попадания с сопла на фюзеляж (систему опережения), если она имелась на ракете.
По второму варианту комплексная головка самонаведения содержит оптическую и инфракрасную цифровые фотокамеры, блок порогового пропускания сигнала оптической фотокамеры, блок выключения инфракрасных пикселей, электронный ключ и линию задержки, при этом сигнал с инфракрасной камеры поступает на специализированный компьютер системы управления, где с заданной степенью достоверности сравнивается с имеющимися в памяти компьютера всеракурсными изображениями всех известных самолетов, и после идентификации типа самолета компьютер определяет заранее заданное разрешение или запрещение поражения цели, причем на цели выбирается заранее запрограммированное наиболее уязвимое место, и дальнейшее наведение осуществляется в это место по показаниям инфракрасной камеры.
При этом ГСН имеет пассивный или активный радиолокатор.
Используемые в данной ГСН телевизионный (ТВ) и тепловизионный (ТПВ) приемники разнесены друг от друга, поэтому при наблюдении за объектом возникает параллакс, и наложение изображений от ТВ и ТПВ приемников получается некачественным. Кроме того, разнесение ТВ и ТПВ приемников значительно увеличивает габариты ГСН. Помимо этого, используемые приемники неатермальны, что приводит к необходимости принудительной подфокусировки при изменении внешних воздействующих факторов.
Следует отметить также, что в известной ГСН при проведении обнаружения, захвата, автосопровождения и распознавания объекта оптической системой ТВ и ТПВ приемников не удается достичь высокой точности из-за воздействия на нее внешних факторов.
В целом, данная ГСН не обеспечивает получение качественного изображения объекта с достаточной точностью из-за ее незащищенности от воздействия внешних факторов, а конструктивное исполнение ГСН имеет значительные габариты.
Известна пассивная двухспектральная ГСН для зенитных управляемых ракет (см. патент РФ на полезную модель №127889, М.кл. F41G 7/26, опубл. 10.05.2013 г.), содержащая гирокоординатор, имеющий оптическую систему и модулирующие растры инфракрасного и фотоконтрастного каналов, установленные на роторе гироскопа, фотоприемники каналов, установленные на внутренней рамке карданова подвеса гироскопа, усилители сигналов, ключ переключения каналов оператором, узел селекции цели и формирования сигнала коррекции оси гироскопа, включающий цепь обработки видеосигнала от цели, содержащую последовательно соединенные управляемый делитель видеосигнала, усилитель несущей частоты, блок стробирования видеосигнала от цели, детектор, ограничитель и усилитель огибающей, выход которого подключен к катушке коррекции положения оси гироскопа, размещенной на гирокоординаторе, цепь формирования сигналов для стробирования видеосигнала от цели в зависимости от фазы вращения ротора гироскопа и пеленга его оси относительно оси ракеты, подключенную ко второму входу блока стробирования видеосигнала от цели и включающую датчики фазы вращения ротора гироскопа и пеленга его оси относительно оси ракеты, установленные на корпусе ГСН, и подключенные к первому и второму входам блока формирования сигнала для стробирования видеосигнала от цели данной цепи, при этом в составе узла селекции цели и формирования сигнала коррекции оси гироскопа имеется цепь формирования сигнала для стробирования видеосигнала от цели в зависимости от наличия организованных помех, выполненная в виде последовательно включенных усилителя, вход которого подключен к выходу фотоприемника оптического канала, детектора, блока формирования сигнала для стробирования видеосигнала от цели в зависимости от наличия организованных помех, выход которого через второй ключ оператора подключен к третьему входу блока стробирования видеосигнала от цели, при этом третий вход блока формирования сигнала для стробирования видеосигнала в зависимости от фазы вращения ротора и пеленга его оси относительно оси ракеты подключен к блоку формирования сигнала о типе организованных помех, а его выход подключен к блоку стробирования видеосигнала от цели через третий ключ оператора, кроме того, вторые входы управляемого делителя и ограничителя огибающей цепи обработки видеосигнала от цели подсоединены к блоку формирования коэффициента ослабления видеосигнала в функции измеряемой дальности до цели.
В данной ГСН, в отличие от предыдущего аналога, имеется гирокоординатор с оптической системой и модулирующими растрами инфракрасного и оптического каналов, что позволяет удерживать линии визирования инфракрасного и оптического каналов. Однако стабильность удержания невысока из-за того, что селекция и формирование сигнала коррекции производится с помощью последовательно соединенных аналоговых блоков, что значительно увеличивает уровень суммарной ошибки и снижает точность обработки, быстродействие ГСН также невелико. ГСН по данному патенту выбрана в качестве прототипа.
Достигаемым техническим результатом предлагаемой ГСН является повышение точности и быстродействия ГСН путем расположения ТВ и ТПВ приемников на гиростабилизированной платформе с системой стабилизации линий визирования приемников в узких угловых пределах и использования цифровой обработки видеоизображений.
Достижение указанного технического результата обеспечивается в предлагаемой комбинированной многоканальной головке самонаведения, содержащей гирокоординатор, внутри наружного карданового подвеса которого установлен оптический блок, содержащий связанные между собой приемники телевизионного (ТВ) и тепловизионного (ТПВ) каналов и объектив, систему стабилизации осей гирокоординатора, блок обработки видеосигнала от цели, отличающейся тем, что гирокоординатор представляет собой гиростабилизированную платформу (ГСП), карданов подвес которой выполнен двухосным, позволяющим с помощью системы стабилизации стабилизировать изображение по курсу и тангажу, для чего система стабилизации осей гирокоординатора (СС) содержит связанные между собой датчики угла, датчики угловой скорости, двигатели стабилизации и электронную плату стабилизации, при этом в оптическом блоке ТВ и ТПВ приемники расположены на одной оптической оси комбинированного объектива, а электронная плата обработки изображения от цели выполнена с возможностью распознавания как стационарных целей путем сравнения их контурных и текстурных признаков, так и малоразмерных целей путем анализа вектора признаков цели, полученных в оптическом и инфракрасном диапазонах, а также с возможностью сопровождения цели с одновременным отслеживанием ее масштаба во времени.
Тепловизионный канал образован главным эллиптическим зеркалом, вторичным зеркалом со спектроделительной гиперболической поверхностью, линзовым компенсатором аберраций, состоящим из трех линз - отрицательного мениска, двояковыпуклой линзы и положительного мениска, выполненных из германия, и упомянутым приемником тепловизионного канала в виде матричного фотоприемника, работающего в диапазоне 8-12,5 мкм..
Телевизионный канал образован главным эллиптическим зеркалом, четырехлинзовым компенсатором аберраций, состоящим из вторичного зеркала, выполненного в виде менисковой линзы со спектроделительной гиперболической поверхностью, менисковой положительной линзы, отрицательного мениска и двояковыпуклой линзы, и упомянутым приемником телевизионного канала в виде матричного фотоприемника, работающего в диапазоне 0,55-0,9 мкм.
Выполнение в предлагаемой комбинированной многоканальной головке самонаведения (ГСН) гирокоординатора в виде гиростабилизированной платформы с системой стабилизации осей по курсу и тангажу, включающей датчики угла, малогабаритные датчики угловой скорости и электронную плату стабилизации, которая с высоким быстродействием управляет двигателями стабилизации и позволяет удерживать линии визирования ТВ и ТПВ каналов в очень узких угловых пределах - до 4 угл. сек., обеспечивает высокую точность ГСН.
При этом расположение в оптическом блоке ТВ и ТПВ приемников на одной оптической оси комбинированного объектива реализует оптическую схему ГСН с единым входным зрачком, что позволяет убрать параллакс при наблюдении за объектом и тем самым повысить точность получаемого изображения.
Электронная плата обработки видеоизображений от цели с возможностью распознавания как стационарных целей путем сравнения их камера 6, ТПВ камера 8 и объектив 9. Двигатели 3 стабилизации, датчики 4 угла и датчики 7 угловой скорости, соединенные с электронной платой 2 стабилизации и обработки видеоизображений.
В ГСН также имеются вторичные источники питания, связанные с соответствующими узлами ГСН.
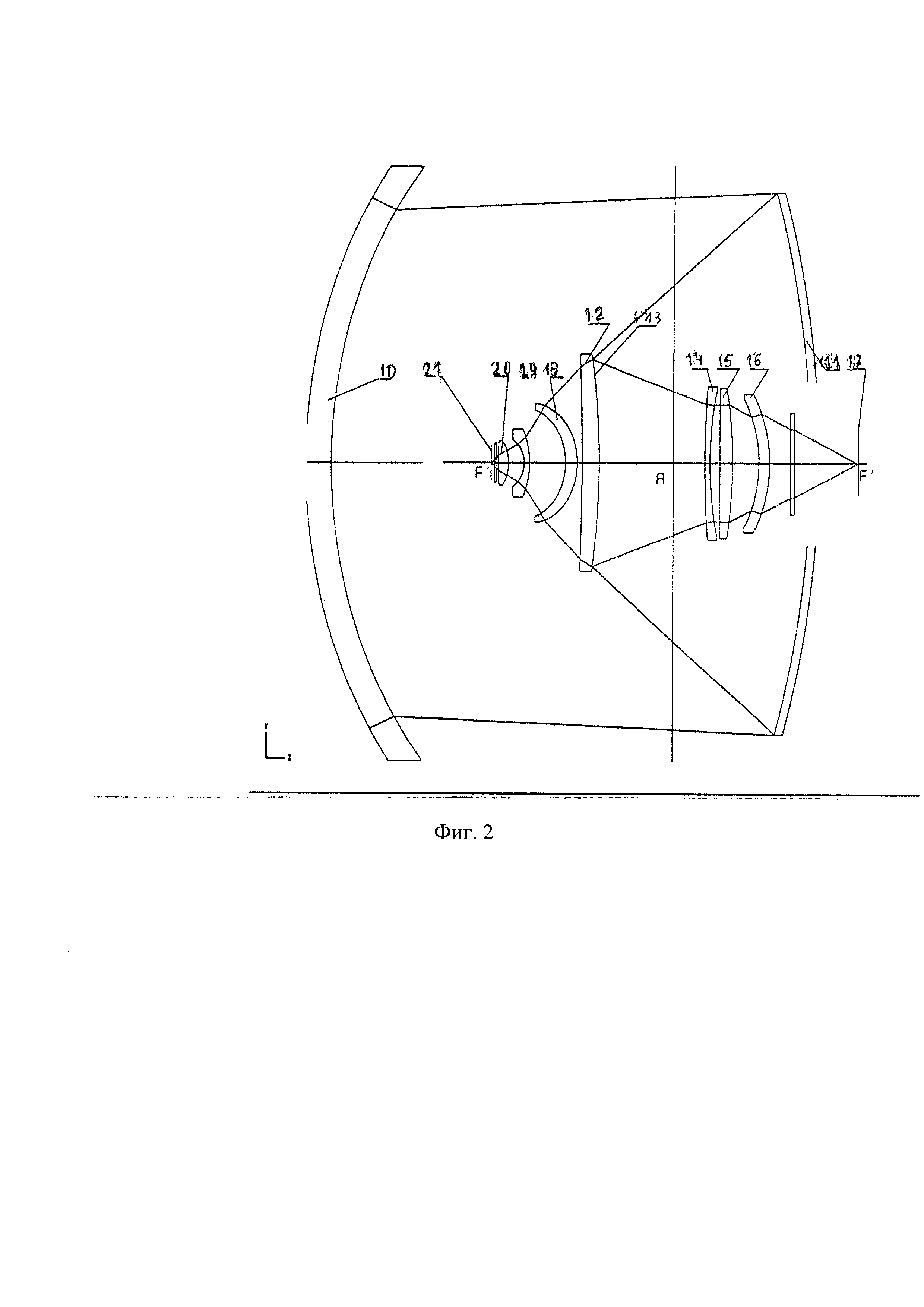
На оптической принципиальной схеме оптического блока (фиг. 2) показаны:
10 - защитное стекло в виде концентрической сферической линзы с центром кривизны поверхностей, совпадающим с точкой А прокачки оптической системы и двух каналов (ТВ и ТПВ);
11 - главное эллиптическое зеркало;
12 - вторичное зеркало;
13 - спектроделительная гиперболическая поверхность вторичного зеркала 13;
14 - отрицательный мениск линзового компенсатора аберраций;
15 - двояковыпуклая линза линзового компенсатора аберраций;
16 - положительный мениск линзового компенсатора аберраций;
17 - матричный фотоприемник;
18 - менисковая положительная линза линзового компенсатора аберраций;
19 - отрицательный мениск линзового компенсатора аберраций;
20 - двояковыпуклая линза линзового компенсатора аберраций;
21 - матричный фотоприемник. ТПВ - канал образуют:
- главное эллиптическое зеркало 11, вторичное зеркало 12 со спектроделительной поверхностью 13, отражающей излучение спектрального диапазона Δλ1=8-12,5 мкм, линзовый компенсатор аберраций, состоящий из трех линз: отрицательного мениска 14, двояковыпуклой линзы 15 и положительного мениска 16, выполненных из германия и матричный фотоприемник 17, работающий в диапазоне Δλ1=8-12,5 мкм. контурных и текстурных признаков, так и малоразмерных целей путем анализа вектора признаков цели, полученных в оптическом и инфракрасном диапазонах, а также с возможностью сопровождения цели с одновременным отслеживанием ее масштаба во времени, реализует операции захвата, автосопровождения, распознавания цели в цифровом виде с помощью разработанных алгоритмов обработки видеоизображений. Цифровая обработка по разработанным алгоритмам обеспечивает высокую точность и быстродействие предлагаемой ГСН.
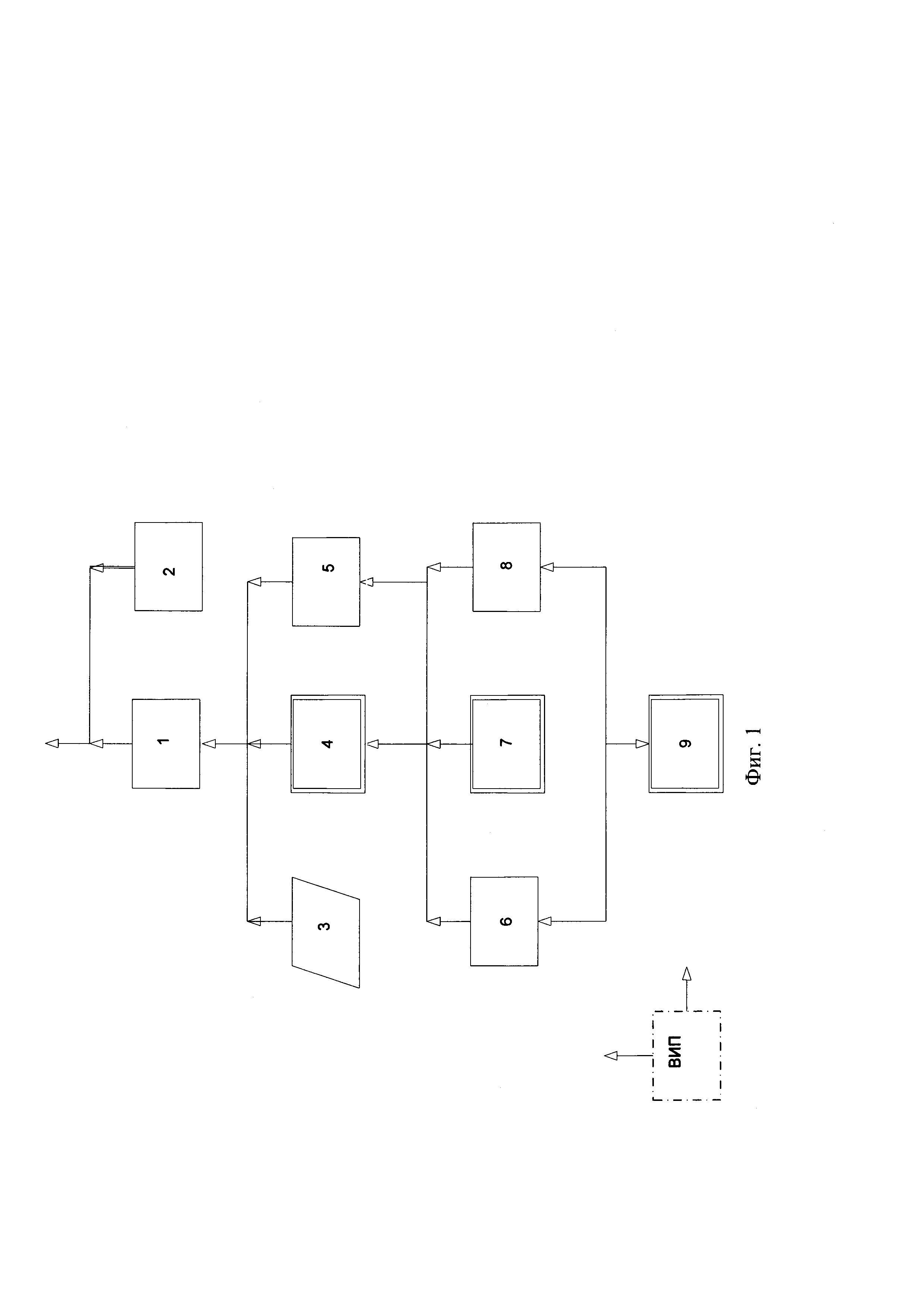
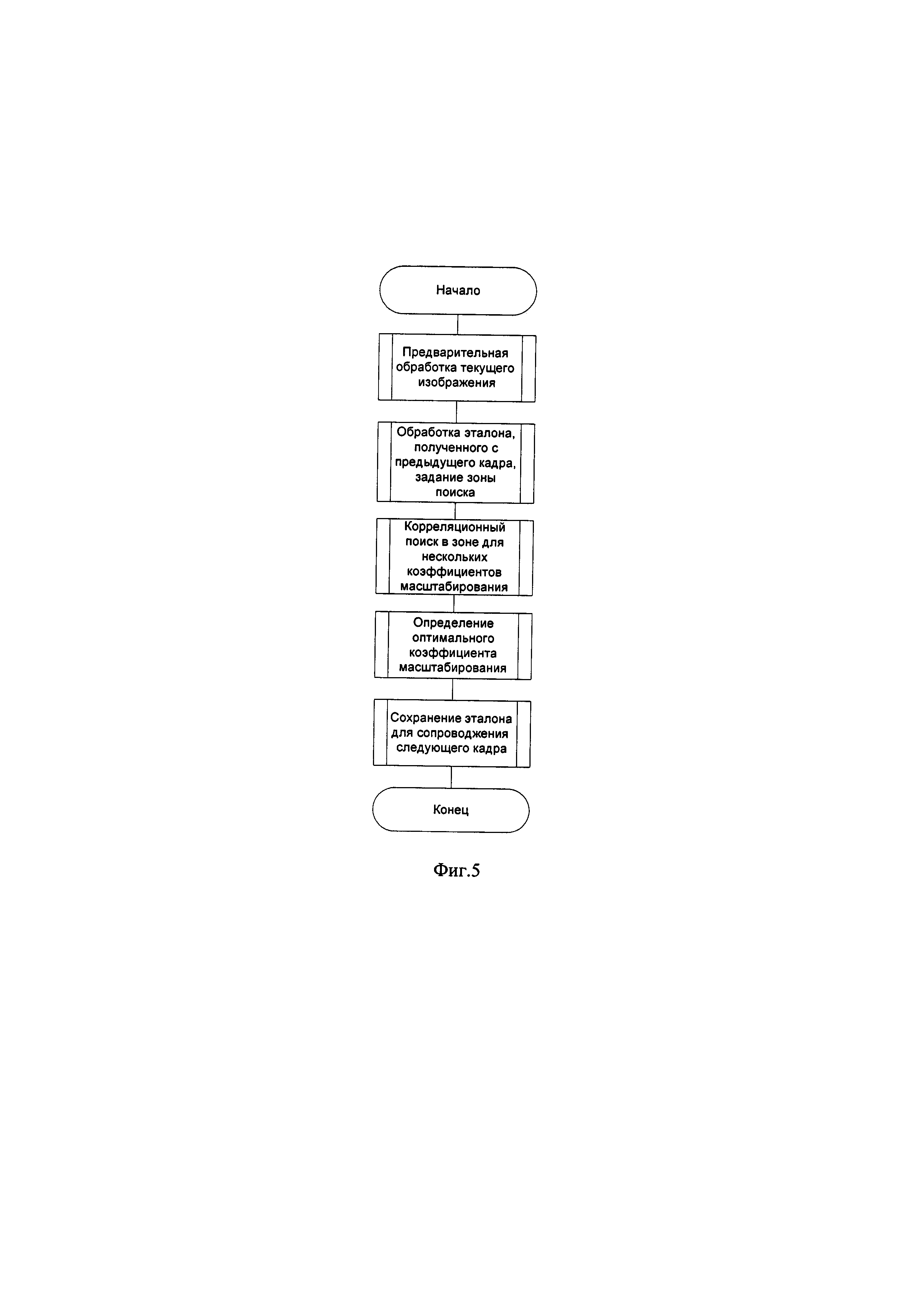
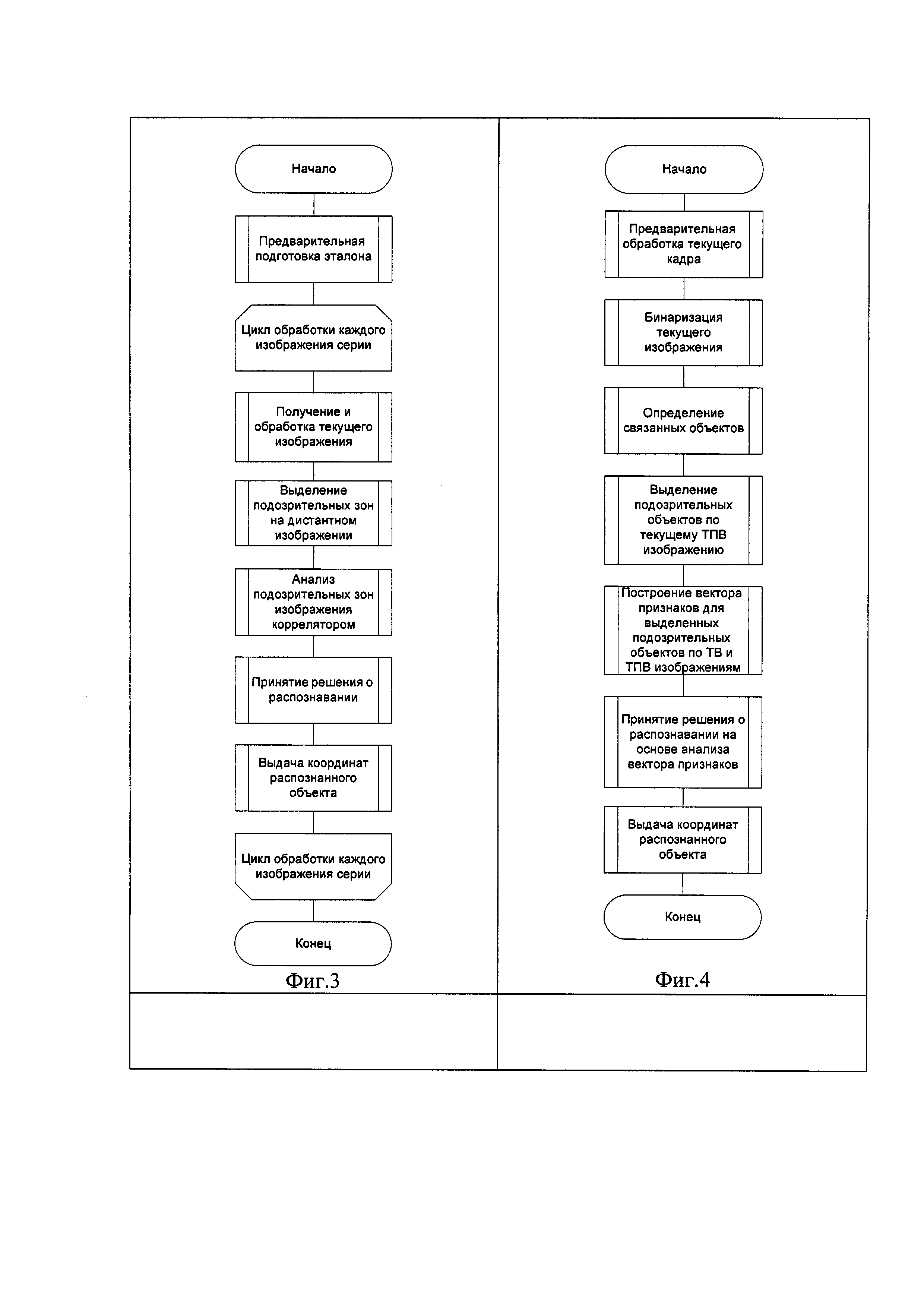
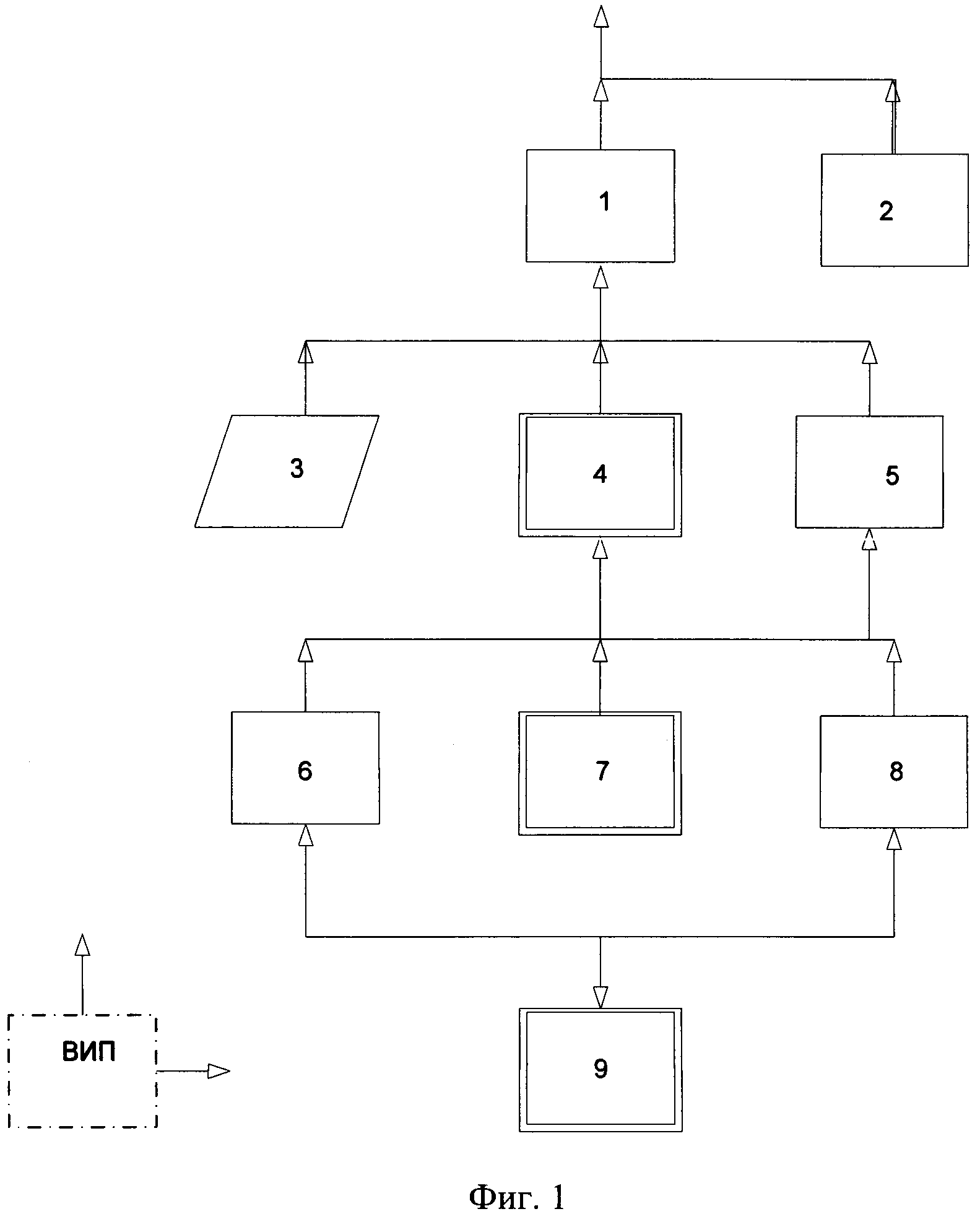
Предлагаемая комбинированная многоканальная ГСН поясняется чертежами, где на фиг. 1 приведена структурная схема предлагаемой комбинированной многоканальной ГСН, на фиг. 2 приведена принципиальная оптическая схема оптического блока предлагаемой ГСН, на фиг. 3, 4, 5 приведены блок-схемы алгоритмов обработки видеоизображений, реализуемых в электронной плате обработки видеосигнала: на фиг. 3 - двухпроходного алгоритма распознавания стационарных целей; на фиг. 4 - алгоритма автоматического обнаружения малоразмерных целей; на фиг. 5 - алгоритма сопровождения целей.
В соответствии с фиг. 1 предлагаемая ГСН содержит:
1 - карданов подвес;
2 - электронную плату стабилизации и обработки изображения;
3 - двигатели стабилизации (ДС);
4 - датчик угла (ДУ);
5 - гиростабилизированную платформу;
6 - ТВ - камеру;
7 - датчик угловой скорости;
8 - ТПВ - камеру;
9 - объектив.
При этом внутри наружного двухосного карданова подвеса 1 гиростабилизированной платформы 5 установлены оптически связанные ТВ ТВ - канал образуют:
- главное эллиптическое зеркало 11, четырехлинзовый компенсатор аберраций, состоящий из вторичного зеркала 12, менисковой положительной линзы 18, отрицательного мениска 19, и двояковыпуклой линзы 20, матричный фотоприемник 21, работающий в диапазоне Δλ2=0,55-0,9 мкм.
Рассмотрим работу предлагаемой комбинированной многоканальной ГСН.
Комбинированный объектив 9 ГСН, работающий одновременно в видимом и ИК областях спектра, формирует на входе в электронную плату 2 стабилизации и обработки изображения одновременно два сигнала: от тепловизионной камеры 8 и от телевизионной камеры 6. На выходе электронная плата 2 стабилизации и обработки изображения формирует информацию о нахождении объекта в кадре относительно его центра.
Выполнение электронной платой 2 стабилизации и обработки изображения от цели распознавания как стационарных целей путем сравнения их контурных и текстурных признаков, так и малоразмерных целей путем анализа вектора признаков цели, полученных в оптическом и инфракрасном диапазонах, а также сопровождения цели с одновременным отслеживанием ее масштаба во времени, реализует операции захвата, автосопровождения, распознавания цели в цифровом виде путем разработанных алгоритмов обработки видеоизображений.
ГСН, работает в следующих режимах:
- в режиме стабилизации;
- управляемого разворота гиростабилизированной платформы 5 в режиме внешнего целеуказания;
- управляемого разворота гиростабилизированной платформы 5 в режиме автоматического сопровождения (АС) цели.
Каждый тракт (курс и тангаж) системы стабилизации осей гирокоординатора в режиме стабилизации работает следующим образом.
Чувствительным элементом системы стабилизации тракта является датчик 7 угловой скорости (ДУС), установленный на ГСП 5. При отклонении платформы 5 от заданного положения под действием на нее возмущающих моментов, ДУС 7 передает скорость этого отклонения в цифровом виде в заданном масштабе в электронную плату 2 стабилизации и обработки изображения. В плате 2 стабилизации и обработки изображения путем интегрирования скорости, рассчитывается угол отклонения ГСП 5 от заданного положения, осуществляется усиление сигнала рассогласования и формируется коррекция этого сигнала с обеспечением устойчивости тракта при его высокой добротности. Сигнал рассогласования в плате 2 стабилизации и обработки изображения соответствующего тракта преобразуется в напряжение, обеспечивающее необходимую мощность и создает токи в обмотках двигателя 3 стабилизации (ДС), пропорционально которым ДС 3 развивает стабилизирующий момент и парирует возмущающий момент по соответствующей оси.
Управление положением ГСП 5 в инерциальном пространстве в режимах управляемого разворота или автосопровождения цели осуществляется путем принятия платой 2 стабилизации и обработки изображения управляющих кодов разворота ГСП 5. Заданные управляющие коды сравниваются с текущими кодами угловых скоростей, поступающими от ДУС 7, сигнал рассогласования формирует токи в обмотках ДС 3. Платформа 5 под воздействием момента ДС 3 разворачивается до момента, когда коды угловых скоростей, заданные и измеренные ДУС 7 сравняются, после чего происходит снятие кода управления.
Управление положением ГСП в инерциальном пространстве в режиме внешнего целеуказания осуществляется по информации об угловом положении цели, рассчитанной в базовой системе координат изделия. В плате 2 стабилизации и обработки изображения осуществляется сравнение текущих углов, с заданными при этом задается код скорости разворота по данной оси, до отработки рассогласования.
Рассмотрим пример реализации предлагаемой комбинированной многоканальной ГСН.
Плата 2 стабилизации и обработки видеоизображений построена на основе микроконтроллера STM32F429 с процессорным ядром ARM Cortex М4 и системы-на-кристалле Altera Arria V SoC 5ASXMB3E4F31, содержащую 2-ядерный блок ЦПУ ARM Cortex А9 с частотой 1050 МГц. При этом вычислители вместе с периферийными и интерфейсными узлами и 1Гб DDR3 памятью размещаются на единой печатной плате в габаритах 120×120 мм.
Для удовлетворения требований, предъявляемых к системе гиростабилизации МКТТ ГСН, в качестве двигателя 3 стабилизации, датчика 4 угла и датчика 7 угловой скорости могут быть использованы прецизионные двигатель, датчик угла и датчик угловой скорости.
В прецизионных устройствах углового позиционирования, каким является ГСП, становятся особенно заметными эффекты, связанные с наличием системы механической передачи, такие как уменьшение полосы пропускания, возникновение шумов и т.п. Применение двигателя с прямой передачей момента вращения (моментного двигателя) в качестве двигателя стабилизации позволяет исключить вышеназванные недостатки в работе привода. Двигатель с прямой передачей момента вращения развивает высокий момент, обеспечивают быстрое ускорение, неизменность скорости вращения и прецизионность управления. Поскольку нагрузка передается непосредственно на двигатель, система стабилизации с применением моментного двигателя обладает высокой механической жесткостью.
Применение моментного двигателя в системе стабилизации дает значительные преимущества, однако предъявляет и более высокие требования к системе управления перемещением, в частности, к датчику 4 угла. Магнитный датчик угла поворота AS5048A (Austria Microsystems), работая в паре с моментным двигателем ДБ-055, позволяют создавать высокоточные СС. Система измерения угла поворота представляет собой однокристальную микросхему AS5048A с размерами корпуса 5,3×6,2 мм и поворотный магнит, размещенный напротив микросхемы. В силу того, что определение угла происходит бесконтактно, такая конструкция имеет повышенную надежность за счет исключения трущихся частей, и идеально подходит для применения в неблагоприятных условиях эксплуатации, обеспечивая при этом высокую точность измерения.
В качестве чувствительного элемента системы стабилизации ГСН предполагается использование датчика угловой скорости - ADIS16362. ADIS16362 - функционально законченный инерциальный датчик с 3 степенями свободы, он включает в себя трехосевой гироскоп с возможностью выбора диапазона ±75, ±150 или ±300% и температурный датчик. На выходе прибор выдает 14-разрядные данные, соответствующие угловым скоростям и ускорению по всем трем осям, и 12-разрядные данные, соответствующие температуре. Датчик представляет собой модуль размером 23×23×23 мм с 24-выводным разъемом. Рассчитан на температурный диапазон -40… +105°С.
Основными параметрами, определяющими характеристики оптического блока ГСН, являются:
1. Габаритные размеры: световой диаметр не более 100 мм, продольная длина не более 220 мм, включая приемник (длина приемника ТПВ - 39÷42 мм, приемника ТВ - менее 50 мм).
2. Приемник ТПВ канала (ИК - камера 8): 640×480 пикселей, размер пикселя 17 мкм. Диагональ приемника 13,6 мм.
3. Приемник ТВ канала (ТВ - камера 6) - КМОП-матрица размером 4,8×3,6 мм с размером пикселя 3,75 мкм.
Предлагается совмещенная оптическая система 2-х каналов - ТПВ и ТВ, оптические оси которых пространстве предметов и положение входных зрачков - D совмещены.
Антенна емкостная двухрезонансная для укв диапазона частот
Комплексная система информационного обеспечения безопасности судоходства северного морского пути с использованием каналов метеорной связи
Модуль захвата цели
Способ распознавания объектов на изображении
Емкостная двухрезонансная укв антенна
Емкостная приемопередающая антенна средневолнового диапазона
Быстро перестраиваемая емкостная приемо-передающая антенна коротковолнового диапазона
Быстро перестраиваемая емкостная приемо-передающая антенна коротковолнового диапазона
Способ хирургического лечения трицепс-синдрома у детей с дцп
Cпособ автоматического распознавания объектов на изображении
Двухканальная оптико-электронная система
Виброизолирующая подвеска трубопровода
Способ пассивного автоматического гидроакустического обнаружения морских объектов
Способ распознавания объектов на изображении
Терморадиационностойкая эластомерная композиция
Привод запорной трубопроводной арматуры
Способ диагностики огнестрельных ранений позвоночника с помощью магнитно-резонансной и рентгеновской компьютерной томографии
Способ изготовления обрезиненных резистивных электрообогревателей для морской техники

