Результат интеллектуальной деятельности: СПОСОБ ПАССИВНОГО АВТОМАТИЧЕСКОГО ГИДРОАКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ МОРСКИХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и предназначено для обнаружения морских объектов в условиях высокого уровня помех.
Известна подводная система обнаружения морских объектов (см. патент на изобретение Японии JP 2012122736, М. кл. G01S 15/96, опубл. 28.06.2012 г.), в которой реализован способ активного автоматического гидроакустического обнаружения местонахождения морского объекта (рыболовной шхуны) на фоне других движущихся надводных объектов. Для этого с помощью лазерного устройства определяют пеленг на морской объект, а с помощью гидролокатора уточняют тип морского объекта. При этом путем сравнения акустических сигналов, отраженных от морских объектов (целей), с заданным порогом строят двумерную картину выделенных целей за множество временных моментов принятия сигнала. Причем по горизонтальной оси откладывают временные интервалы, а по вертикальной оси - пеленги на обнаруживаемые цели. По обнаруженным точкам пеленгов на цели строят траектории их движения и экстраполируют положение цели в последующие моменты времени.
Однако, поскольку данный гидроакустический способ является активным, возникает возможность обнаружения противником подводной системы, реализующей данный способ, и применения противником средств гидроакустического противодействия (СГПД). Вероятность обнаружения увеличивается также из-за использования метода активной лазерной локации. Кроме того, траектория движения объекта строится по уже обнаруженным точкам местонахождения цели, которые с достаточной долей вероятности могут быть ложными из-за большого числа гидроакустических помех таких, как переотражения истинного сигнала от морского дна и поверхности моря, а также шумов волн при сильном ветре и т.д.
Известен способ гидроакустического автоматического обнаружения подводных объектов и построения траекторий их движения (см. патент на изобретение КНР CN 104730528, М. кл. G01S 15/66, опубл. 24.06.2015 г.), в котором осуществляют сравнение отраженных от целей акустических сигналов с заданным порогом и строят двумерную картину выделенных целей. Для этого фиксируют выделенные цели за множество временных интервалов принятия сигнала и размещают временные интервалы по горизонтальной оси, а пеленги на обнаруженные цели - по вертикальной оси. Далее по обнаруженным точкам пеленгов на цели строят траектории их движения и экстраполируют положение цели в последующие моменты времени.
Траектория движения в данном способе, как и в предыдущем аналоге, строится по уже обнаруженным точкам местонахождения цели, которые могут быть ложными из-за большого числа гидроакустических помех.
Известен способ активного гидроакустического наблюдения за подводной сигнально-помеховой обстановкой с целью защиты акваторий от несанкционированного проникновения малошумящих подводных объектов в районы охраняемых техногенных объектов (см. патент РФ на изобретение №2309872, М. кл. В63О 9/00, B63G 8/39, F41H 1/00, опубл. 10.11.2007 г.).
В данном способе используется маломощный активный канал первичного обнаружения и пеленгования и пассивный канал классификации целей. С помощью пассивного канала осуществляют сравнение обработанных сигналов, отраженных от движущегося подводного объекта, с пороговым значением, при превышении которого делают вывод о наличии в зоне обнаружения подводного объекта-нарушителя. После этого включают активный канал целеуказания и доклассификации. Если данным каналом подтверждается наличие в зоне обнаружения подводного объекта-нарушителя, информацию об этом передают на мобильные или стационарные средства наблюдения или используют для старта боевой части.
Однако в данном способе дальность первичного обнаружения цели снижена из-за уровня излучения, близкого к уровню шумов в полосе приема. При этом, поскольку первичное обнаружение и пеленгование осуществляется активным каналом, скрытность процесса обнаружения снижена. Кроме того, в данном способе не предусмотрено построение траектории движения цели, что снижает его функциональные возможности.
Известен способ акустического обнаружения подводных объектов, реализованный в соответствующем устройстве (см. патент РФ на полезную модель №103193, М.кл. G01S 15/00, опубл. 27.03. 2011 г.).
Данный способ является активным гидроакустическим и в нем облучают активным гидроакустическим сигналом контролируемое пространство, принимают отраженные от морских объектов сигналы и формируют в каждый момент времени пакет данных о принятом сигнале в виде уровней принятого сигнала для множества пеленгов - углов ψi, где ψi принимает значения от 0 до 360° с дискретностью один градус, при этом сравнивают отраженные сигналы с заданным порогом и осуществляют бинарное накопление (бинарное интегрирование) пакетов данных в двумерном представлении, после чего формируют двумерное изображение на основе двумерной картины выделенных целей и строят траекторию их движения.
Поскольку данный способ является активным гидролокационным, то, как уже указывалось выше, повышается вероятность обнаружения противником подводной системы, реализующей данный способ, и создается возможность применения СГПД.
При этом траектория движения в данном способе строится по уже обнаруженным точкам местонахождения цели, которые могут быть ложными из-за большого числа гидроакустических помех.
Данный способ выбран в качестве прототипа.
Техническим результатом предлагаемого изобретения является повышение помехоустойчивости и скрытности обнаружения морских объектов.
Достижение указанного технического результата обеспечивается в предлагаемом способе пассивного автоматического гидроакустического обнаружения морских объектов, при котором анализируют принятый гидроакустический сигнал и по нему контролируют окружающее пространство, принимают излучаемые морскими объектами сигналы и формируют в каждый момент времени пакет данных о принятом сигнале в виде уровней принятого сигнала для множества пеленгов - углов ψi, где ψi принимает значения от 0 до 360° с дискретностью dψ равной одному градусу, отличающемся тем, что производят накопление пакетов данных в течение заданного времени t с дискретностью получения пакетов dt и формируют текущее двумерное изображение для последующей обработки, имеющее высоту, равную количеству элементов пакета данных, и ширину, соответствующую задержке времени t на L единиц, где L - количество накопленных пакетов за время t, в сформированном двумерном текущем изображения анализируют все точки по вертикальному столбцу с горизонтальной координатой вертикального столбца, равной L/2-середине текущего изображения, путем сравнения с порогом обнаруживают на анализируемой вертикали точки, принадлежащие траекториям целей, с получением каждого нового пакета данных текущее изображение сдвигают влево на один пиксел и в крайний правый столбец изображений записывают очередной пакет, а крайний левый пакет удаляют, далее сдвинутое текущее изображение, сформированное из принимаемых пакетов данных обрабатывают путем анализа вертикального столбца в середине изображения с горизонтальной координатой вертикального столбца, равной L/2-середине текущего изображения и получают новые точки целей, определяя при последовательном получении пакетов данных и обработке сформированных текущих изображений точки траекторий целей.
Поскольку в предлагаемом способе, в отличие от прототипа, используется анализ контролируемого пространства пассивным гидроакустическим прибором, вероятность обнаружения противником подводной системы, реализующей данный способ, значительно снижена.
При этом траектория движения точек цели строится, в отличие от прототипа, не по уже обнаруженным точкам цели, которые могут быть ложными из-за большого числа помех, а путем анализа сформированного текущего изображения относительно выделенных точек целей, по которым осуществляется непрерывный процесс построения траекторий движения целей. Это обеспечивает одновременно со снижением вероятности обнаружения повышение помехоустойчивости предлагаемого способа.
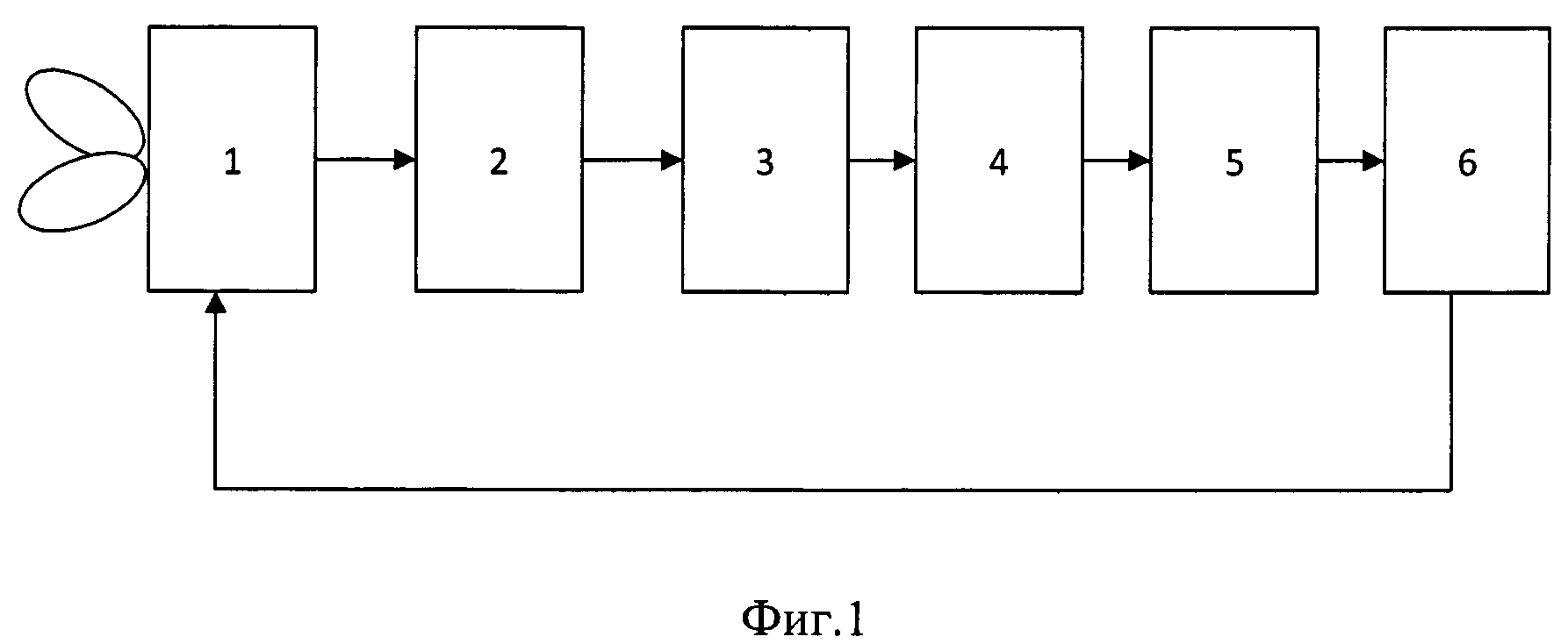
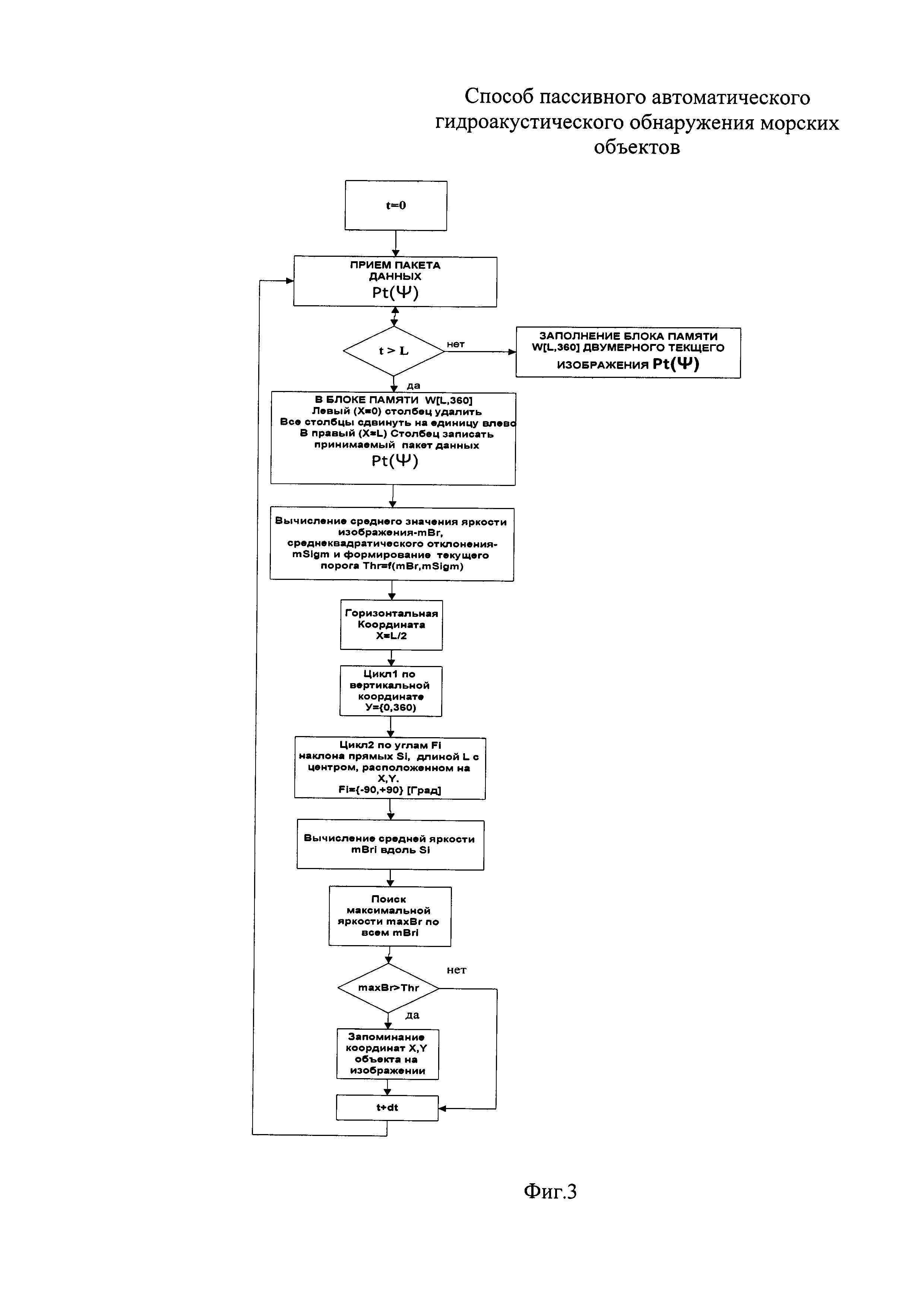
Предлагаемый способ поясняется примером устройства для его реализации, приведенном на фиг. 1, на фиг. 2 приведена диаграмма формирования двумерного изображения из принимаемых одномерных пакетов данных, а на фиг. 3 - блок-схема алгоритма осуществления предлагаемого способа.
Согласно фиг. 1 устройство содержит гидроакустический приемник (ГАП) 1, выход которого соединен с входом накопителя 2 пакетов данных, выходом связанного со входом формирователя 3 двумерного изображения, выход которого подключен ко входу блока 4 определения точек сигналов цели, выход которого подключен ко входу блока 5 сдвига текущих изображений, выход которого соединен со входом блока 6 формирования траекторий целей, выход которого соединен с входом ГАП 1.
Реализация предлагаемого способа в данном устройстве осуществляется следующим образом.
Гидроакустический приемник (ГАП) 1 в текущий момент времени t с помощью сканирующих диаграмм направленности формирует последовательно пакеты данных - Р (Ψ), где Ψ - угол пеленга (0°…360°) с дискретом в 1°, где Р (Ψ) - мощность принимаемого сигнала в данном направлении. Принятые пакеты данных (сигналов) поступают в накопитель 2, где происходит накопление принятых пакетов данных до значения их количества, равного L. Как только число пакетов накопится до величины L, производят формирование двумерного изображения в формирователе 3 двумерного изображения. Процесс формирования двумерного изображения можно пояснить диаграммой (см. фиг. 2), на которой по горизонтальной оси располагается время принятия пакета [0…L], а по вертикальной оси - значения мощностей принимаемого сигнала Р (Ψ). По сформированному изображению в точках вертикальной линии с горизонтальной координатой L/2 с помощью блока 4 определения точек сигналов целей обнаруживают точки сигналов от морских объектов. Обнаружение производится за счет анализа сформированного изображения относительно точек на вертикальной линии. Далее через время dt (дискрет принятия очередного пакета данных от ГАП) с помощью блока 5 сдвига текущих изображений при приеме очередного пакета данных осуществляют сдвиг сформированного текущего изображения. После этого в блоке 6 формирования траекторий целей точки выделенных траекторий в момент времени, соответствующий L/2, запоминаются, и по ним строятся траектории движения морских целей. С приходом очередного пакета данных в накопителе 2 пакетов данных удаляется последний левый пакет, соответствующий времени его принятия, сдвинутому на L относительно момента принятия текущего пакета. Все пакеты, начиная с предпоследнего слева, сдвигаются на один дискрет времени налево и самый правый пакет заменяется на принимаемый текущий.
Таким образом, осуществляется непрерывность процесса формирования двумерного изображения шириной L и построения траекторий морских целей (если они были обнаружены).
На фиг. 2 представлена временная диаграмма формирования двумерного изображения из принимаемых одномерных пакетов данных. На диаграмме время, равное 0, соответствует приему очередного пакета данных и расположено на горизонтальной оси справа. Далее, с приходом каждого нового пакета данных ранее принятые пакеты смещаются на единицу влево по оси времени, а в нулевую координату заносится новый пакет. Таким образом, время, измеряемое дискретами прихода пакетов или количеством принятых пакетов данных, течет справа налево. Как только число принятых пакетов составит величину L, начинается обработка изображения, сформированного из принятых пакетов. Изображение получают из L пакетов: по горизонтальной оси отображается номер принятого пакета (или время, прошедшее с момента принятия данного пакета), по вертикальной оси, с точностью в один градус (угол приема акустического сигнала сканирующей антенной ГАП), изображена мощность принятого в данном направлении сигнала.
Рассмотрим пример выполнения блоков устройства для реализации предлагаемого способа.
Гидроакустический приемник (ГАП) 1 может быть выполнен на основе пассивного приемника гидроакустических сигналов со сканирующей диаграммой направленности в диапазоне углов пеленга (0°…360°) с дискретом в 1°, например, основанный на известном в гидроакустике способе формирования равносигнальной зоны с помощью двух диаграмм направленности с перекрывающимися главными лепестками, относительно развернутых на постоянный угол, в котором сигналы, принимаемые двумя антеннами с перекрывающимися главными лепестками диаграмм направленности (ДН) или одной антенной с периодическим изменением положения главного лепестка ДН, имеют равную амплитуду. Применяется в радио- и гидролокации для определения с высокой точностью угловых координат цели (см. 1. В.В. Шулейкин. Физика моря. - Москва: «Наука», 1968 г.. - 1090 с.; 2. И.А. Румынская. Основы гидроакустики. - Москва: «Судостроение», 1979 г.. - 105 с.; 3. Ю.А. Корякин. Гидроакустические системы. - СПб: «Наука Санкт-Петербурга и морская мощь России», 2002 г. - 416 с.; 4. М.В. Мироненко, С.В. Шостак, П.А. Стародубцев, Е.Н. Бакланов, А.П. Шевченко Обнаружение акустических слабозаметных морских объектов просветными гидроакустическими системами методом фазового приема и обработки сигналов. - Известия Южного федерального университета. Технические науки. 2016 г.).
Работа всех остальных блоков осуществляется в соответствии с блок-схемой алгоритма, представленного на фиг. 3, при котором в каждый момент t принятия накопителем 2 очередного пакета данных от ГАП 1 производится анализ времени t. В начале работы алгоритма t=0. Время t представляет собой количество временных интервалов - dt принятия пакетов данных. Пока t меньше заданной величины L, производится заполнение стека блока памяти накопителя 2, обеспечивающего формирование блоком 3 текущего двумерного изображения. Блок памяти имеет емкость Lx360 восьмиразрядных чисел. Каждое число отображает сигнал в диапазоне яркостей от 0 до 255. Формируемое текущее изображение соответственно имеет размеры: по горизонтали - L столбцов, по вертикали 360 строк. Яркость каждого пикселя изображения имеет диапазон яркостей от 0 до 255. Соответственно уровни принимаемых от ГАП 1 сигналов масштабируются в диапазон 0,255. Для заполнения стека памяти все столбцы стека сдвигаются на одну позицию влево. В самый правый столбец записывается очередной пакет данных, перемасштабированный в диапазон от 0 до 255. Как только время t станет равным L, память для формирования изображения заполнена полностью. Как только t превысит L, самый левый столбец стека памяти выбрасывается, в самый правый записывается очередной пакет данных. Таким образом, в памяти хранятся данные от момента принятия пакета данных L моментов времени назад до текущего момента. Соответственно текущее изображение имеет историю в L моментов времени и, следовательно, хранит L принятых пакетов данных. Таким образом, из одномерного принятия пакетов данных от ГАП 1 перешли к двумерному представлению. Далее в блоке 4 определения точек сигналов цели в текущем изображении вычисляются среднее значение яркости - mBr и среднеквадратическое отклонение - mSigm. По полученным значениям определяется порог - Thr=f(mBr, mSigm). Превышение этого порога позволяет обнаруживать точки траекторий морских целей. Для этого выбирается столбец с координатой L/2 -середина текущего изображения. Вдоль столбца, для каждой точки пеленга Y осуществляется следующая операция: через каждую точку с вертикальной координатой Y проводится отрезок прямой длиной L, центр которой лежит на столбце с горизонтальной координатой L/2. Этот отрезок совершает вращение относительно своего центра в диапазоне углов Fi {-90°, +90°) с шагом по углу в 1°. Для каждого угла поворота Fi рассчитывается средняя яркость подлежащего под отрезком Si прямой текущего изображения - mBri. Вычисляется максимум средней яркости для всего множества поворотов - maxBr. Если maxBr превышает порог Thr, то считается, что данная точка центра прямой лежит на траектории движения морского объекта-цели. Координаты цели: Y и L/2 запоминаются. Эти координаты соответствуют положению цели (или целей при многократном превышении порога) L/2 моментов времени назад от текущего времени t Далее время увеличивается на величину dt, блоком 5 осуществляется сдвиг текущего изображения, и процесс формирования двумерного изображения продолжается. Одновременно в блоке 6 строятся траектории движения целей с запаздыванием по времени на L временных интервалов принятия пакетов данных от ГАП 1.
Указанные блоки для реализации предлагаемого способа могут быть реализованы на программируемом многофункциональном средстве - персональном компьютере например, с процессором Intel(R) Core™ i5-4440 CPU@ 3.10GHz, ОЗУ 16.0 Гб, 64-разрядная операционная система).
Блок сопряжения компьютера с ГАП 1 реализуется на микропроцессорном устройстве, осуществляющем аналого-цифровое преобразование и масштабирование сигналов, принимаемых от ГАП 1 (например, на вычислительной микропроцессорной системе ALTERA CYCLONE 5 см. http://www.altera.com).
Способ пассивного автоматического гидроакустического обнаружения морских объектов, при котором анализируют принятый гидроакустический сигнал и по нему контролируют окружающее пространство, принимают излучаемые морскими объектами сигналы и формируют в каждый момент времени пакет данных о принятом сигнале в виде уровней принятого сигнала для множества пеленгов - углов ψi, где ψi принимает значения от 0 до 360° с дискретностью dψ, равной одному градусу, отличающийся тем, что производят накопление пакетов данных в течение заданного времени t с дискретностью получения пакетов dt и формируют текущее двумерное изображение для последующей обработки, имеющее высоту, равную количеству элементов пакета данных, и ширину, соответствующую задержке времени t на L единиц, где L - количество накопленных пакетов за время t, в сформированном двумерном текущем изображении анализируют все точки по вертикальному столбцу с горизонтальной координатой вертикального столбца, равной L/2-середине текущего изображения, путем сравнения с порогом обнаруживают на анализируемой вертикали точки, принадлежащие траекториям целей, с получением каждого нового пакета данных текущее изображение сдвигают влево на один пиксел и в крайний правый столбец изображений записывают очередной пакет, а крайний левый пакет удаляют, далее сдвинутое текущее изображение, сформированное из принимаемых пакетов данных обрабатывают путем анализа вертикального столбца в середине изображения с горизонтальной координатой вертикального столбца, равной L/2-середине текущего изображения, и получают новые точки целей, определяя при последовательном получении пакетов данных и обработке сформированных текущих изображений точки траекторий целей.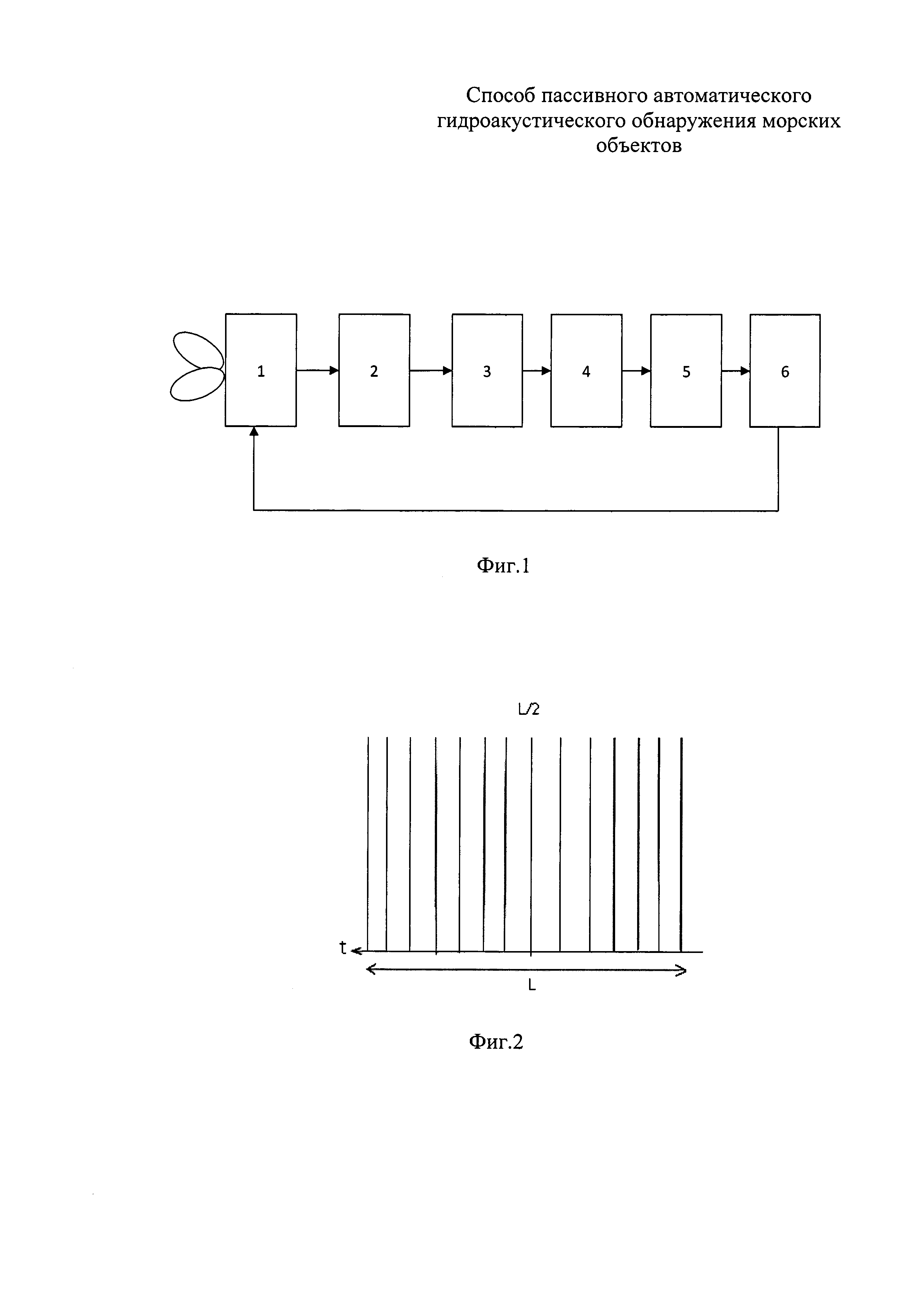
Устройство измерения высоты небесных светил
Устройство определения направления на источник звука
Способ хирургического лечения трицепс-синдрома у детей с дцп
Cпособ автоматического распознавания объектов на изображении
Двухканальная оптико-электронная система
Многоэлементный антенный линейный дискретный цифровой модуль
Виброизолирующая подвеска трубопровода
Комбинированная многоканальная головка самонаведения
Способ распознавания объектов на изображении
Терморадиационностойкая эластомерная композиция
Привод запорной трубопроводной арматуры

