Результат интеллектуальной деятельности: Адаптивный способ и устройство принудительного сброса - катапультирования груза
Вид РИД
Изобретение
Предложенные изобретения относятся к авиационной технике, а именно к системам авиационного вооружения с принудительным катапульным отделением от носителя авиационных грузов, таких как бомбы, контейнеры и ракеты.
Применение принудительно-катапультного отделения авиационных грузов продиктовано необходимостью обеспечения безопасности отделения без взаимного повреждения как носителя, так и груза, а также воздействием больших аэродинамических сил.
Известны способы сброса грузов (см. патенты RU 2402460 от 2006 г. и US 7648104 от 2010 г.), в которых сброс осуществляется путем подачи сжатого газа или жидкости в полости цилиндров переднего и заднего толкателей по заранее установленному закону изменения давления.
Достоинством указанных способов является простота схемы управления, которая заключается только в задействовании пневмосети или последовательности задействования газовой и гидравлической сетей.
Недостатком указанных способов является их неадаптивность к внешним и внутренним факторам, из-за отсутствия в контурах управления обратных связей по возмущающим в процессе полета факторам.
Наиболее близким способом, принятым за прототип является способ сброса груза, реализованный в устройстве «балочного держателя» (патент RU 2521446 от 2012 г.), в котором задействованы контуры обратных связей по внешним возмущающим факторам.
В указанном способе измеряют линейные ускорения (перегрузки) на корпусе балочного держателя, в переднем и заднем толкателях; рассчитываются требуемые значения кинематических параметров движения центра масс груза и движения вокруг центра масс; по измеренным перегрузкам рассчитывают текущие значения кинематических параметров движения груза; по разности линейных скоростей требуемых (заданных) и текущих значений формируют управляющие сигналы на гидроприводы переднего и заднего толкателей с определенными весовыми коэффициентами.
Достоинством этого способа является наличие контуров обратной связи, обеспечивающих адаптивный способ сброса к воздействию изменяющихся внешних факторов. Этот способ позволяет автономно без получения предварительных данных о действующих на груз аэродинамических нагрузках обеспечить безопасное отделение груза на всех боевых режимах полета носителя.
Недостатком указанного способа является отсутствие адаптивности к внутренним воздействующим факторам. Так угловая скорость движения груза относительно центра массы задается постоянной на всех режимах полета, а линейная скорость движения центра массы не имеет ограничения по максимально допустимой величине, что может привести к неустойчивости системы стабилизации груза.
Устройство по реализации принудительного способа сброса, взятого за прототип (Патент RU 2521446 за 2012 г.), содержит корпус с размещенным на нем пироприводом, выполненным на основе двухполостного цилиндра, одна полость которого является полостью сгорания, а вторая - полостью сжатия рабочей жидкости, последняя через гидрораспределитель связана с гидроцилиндрами переднего и заднего гидротолкателей, на гидротолкателях и корпусе размещены датчики линейных перегрузок, выходные обмотки которых соединены с вычислительным блоком.
Достоинством этого устройства является то, что в качестве исполнительных механизмов переднего и заднего толкателей использованы гидросистемы, содержащие гидроцилиндры с электрогидроклапанами. Использование гидросистемы с несжимаемой рабочей жидкостью позволяет повысить быстродействие сброса по сравнению с пневмосистемой.
Недостатком указанного устройства является то, что в гидросистеме использованы однополостные гидроцилиндры с гидроклапанами, изменяющими подачу жидкости под давлением в этой полости. Такой элементный состав гидросистемы не позволяет по необходимости эффективно тормозить гидротолкатели.
Задачей заявляемого изобретения является повышение качества принудительного сброса груза.
Техническим результатом является повышение качества принудительного сброса груза, исключение возможности возникновения аварийных ситуаций и неустойчивости системы стабилизации груза путем создания ее адаптивности как к внешним, так и к внутренним факторам; повышение эффективности управления гидротолкателями, заключающееся в возможности как разгонять, так и тормозить гидротолкатели при их кратковременном движении за счет использования гидрораспределителей с двумя выходами и двухполостных цилиндров гидротолкателей.
Заявленный технический результат достигается тем, что в известном способе принудительного сброса - катапультирования груза, закрепленного узлами крепления с гидротолкателями, заключающемся в том, что измеряют линейные ускорения на корпусе, на штоках переднего и заднего гидротолкателей; рассчитывают заданные значения кинематических параметров движения центра масс груза и вокруг центра масс в зависимости от режима полета; рассчитывают по измеренным перегрузкам текущие значения кинематических параметров движения груза; формируют управляющие сигналы на гидрораспределители переднего и заднего гидротолкателей с определенными весовыми коэффициентами, согласно заявляемому изобретению, управляющие сигналы гидрораспределителей переднего и заднего гидротолкателей формируют в два этапа: на первом этапе управляющие сигналы формируют по разности заданных и текущих значений линейных и угловых ускорений до момента выполнения условий V=Vзад и ω=ωзад, где V, Vзад и ω, ωзад - текущие и заданные значения линейных и угловых скоростей, текущие угловые ускорения ω, т.е. управление катапультированием адаптивно к внешним факторам; на втором этапе в оставшееся время до отделения груза управляющие сигналы формируют по разности заданных и текущих значений линейной и угловой скоростей, т.е. управление катапультированием адаптивно к внутренним факторам.
Сущность предлагаемых технических решений поясняется чертежом.
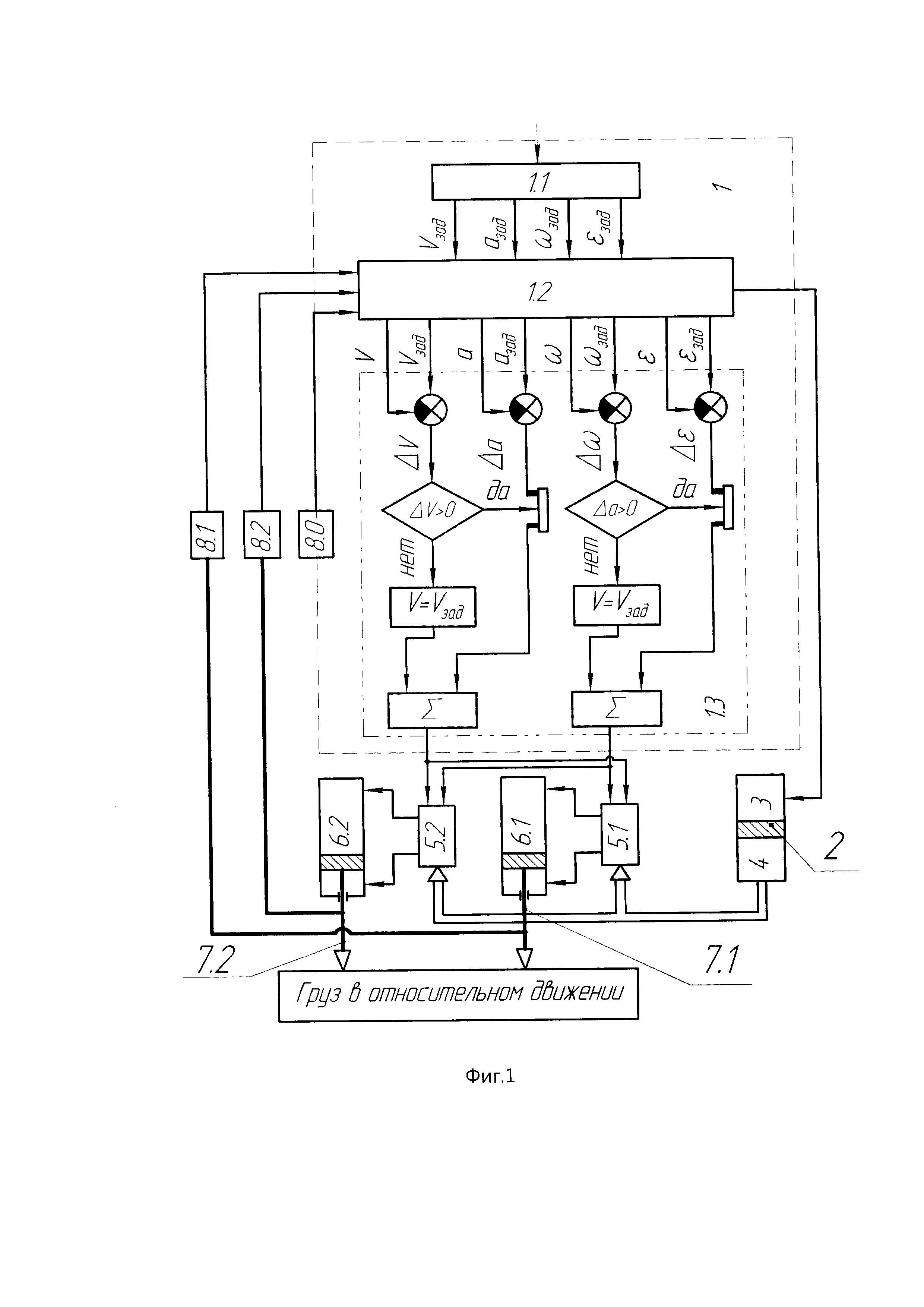
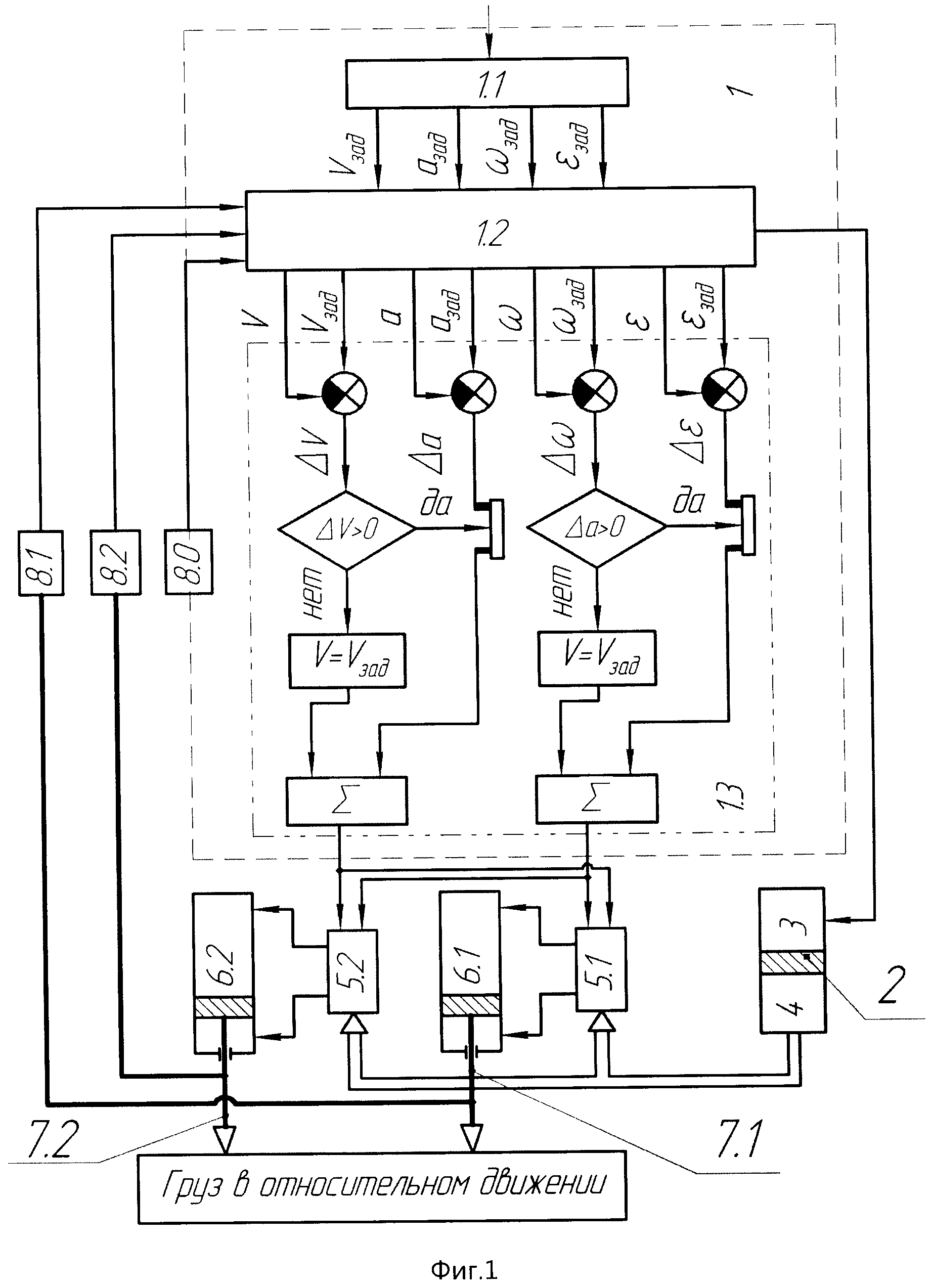
На фиг. 1 приведена функциональная схема заявленных способа и устройства принудительного сброса-катапультирования груза.
Устройство принудительного сброса-катапультирования груза содержит вычислительный блок 1, состоящий из трех блоков: блока расчета начальных условий 1.1, блока расчета текущих значений 1.2 и блока управления гидрораспределителями 1.3; пиропривод 2, который размещен в корпусе (на фиг. 1 не показан) и выполнен на основе двухполостного цилиндра. Полость 3 пиропривода 2 является полостью сгорания, а полость 4 - полостью сжатия рабочей жидкости. Полость 4 через гидрораспределители 5.1 и 5.2 связана с гидроцилиндрами 6.1 и 6.2 переднего 7.1 и заднего 7.2 гидротолкателей. Гидроцилиндры 6.1 и 6.2 переднего 7.1 и заднего 7.2 гидротолкателей выполнены двухполостными, каждая полость которых соединена с одним из выходов гидрораспределителей 5.1 и 5.2 соответственно. Гидрораспределители 5.1 и 5.2 выполнены с регулированием подачи рабочей жидкости, как по величине, так и по направлению. На гидротолкателях 7.1 и 7.2 и корпусе блочного держателя размещены датчики линейных ускорений 8.1 и 8.2 и 8.0 соответственно. Выходы датчиков линейных ускорений соединены с входами вычислительного блока 1.
Способ и устройство принудительного сброса-катапультирования груза работают следующим образом.
При запуске процесса принудительного сброса-катапультирования от бортового центрального вычислителя летательного аппарата (на фиг. 1 не показан) в вычислительный блок 1 вводят начальные условия полета. В состав начальных условий входят геометрические и механические характеристики груза (масса, момент инерции относительно поперечной оси, расстояние между центром масс и точками приложения силы гидротолкателей) и устройства отделения (начальное давление пиропатрона, начальный объем полости сгорания пиропривода 2, масса пороховой навески, площади поршней пироцилиндра и гидроцилиндров 6.1, 6.2, гидротолкателей), а также требуемые параметры отделения груза (вертикальная скорость центра масс груза, угловая скорость груза).
В блоке начальных условий 1.1 формируется команда о воспламенении пиропатрона пиропривода 2 и передается информация в блок расчета текущих значений 1.2 о заданных значениях линейных азад, Vзад и угловых ωзад, εзад ускорений и скоростей движения центра масс и вокруг центра масс в зависимости от режима полета.
В блок 1.2 одновременно поступают сигналы о линейных ускорениях (перенагрузках), измеренных датчиками линейных ускорений 8.0, 8.1, 8.2. По измеренным перегрузкам путем интегрирования рассчитывают текущие значения кинематических параметров движения груза a, V и ω, ε.
Далее формируют сигналы управления гидрораспределителями как разность заданных и текущих значений кинематических параметров:
Δε=εзад-ε; Δω=ωзад-ω;
Δa=азад-a; ΔV=Vзад-V.
Такое управление по ошибкам, вызванным отклонениями возмущающего фактора от заданного значения, обуславливает адаптивность к данному возмущающему фактору.
В блоке управления гидрораспределителями 1.3 сигналы управления формируются в два этапа.
На первом этапе управляющие сигналы формируют по разности заданных и текущих значений линейных и угловых ускорений до момента выполнения условий:
V=Vзад и ω=ωзад.
На этом этапе управление осуществляется по ошибкам ускорений, возникающих от внешних аэродинамических нагрузок, т.е. управление аддаптивно к воздействию изменяющихся внешних факторов.
На втором этапе в оставшееся время до отделения груза управляющий сигнал формируют по разности заданных и текущих значений линейных и угловых скоростей, т.е. по ошибкам этих скоростей, вызванных конструкционными особенностями катапультирующего устройства, что обуславливает адаптивность к воздействию изменяющихся внутренних факторов.
Управляющие сигналы пропорциональные ошибкам линейных Δа и угловых Δε ускорений суммируют, как и сигналы пропорциональные ошибкам линейных ΔV и угловых Δω скоростей, усиливают с определенными весовыми коэффициентами и подают на гидрораспределители 5.1 и 5.2.
В результате сгорания пороха в пиропатроне в двухполостном пироприводе 2 в полости сгорания 3 увеличивается давление, которое сжимает рабочую жидкость в полости сжатия 4. В результате давление рабочей жидкости поступает в гидрораспределители 5.1 и 5.2.
В зависимости от величины и знака управляющих сигналов гидрораспределители 5.1 и 5.2 распределяют поток рабочего тела в полости гидроцилиндров 6.1 и 6.2. Усилие, создаваемое поршнями гидроцилиндров 6.1 и 6.2 зависит от перепада давлений в полостях, а их скорость от распределяемого расхода гидрораспределителями 5.1 и 5.2. Поршни с гидротолкателями 7.1 и 7.2 выдвигаются, преодолевая силы сопротивления со стороны груза. Датчики линейных ускорений 8.1 и 8.2, размещенные на гидротолкателях, измеряют их ускорения, а датчик линейных ускорений 8.0 собственное ускорение летательного аппарата.
В результате обработки в вычислительном блоке сигналов, измеренных датчиками линейных ускорений 8.1 и 8.2, размещенными на гидротолкателях 7.1 и 7.2; учета собственного ускорения летательного аппарата, измеряемого датчиком 8.0, размещенным на корпусе ЛА, получают относительные текущие кинематические параметры движения груза. Из этих параметров вычитают заданные значения и получают ошибки в контурах следящих систем по линейным угловым ускорениям и скоростям. Ошибки контуров следящих систем используют для управления гидрораспределителями, выполненными с двумя выходами, каждый из которых соединен с одной из полостей гидроцилиндров, выполненных двухполостными. При этом управление гидроцилиндрами гидротолкателей осуществляется в два этапа: на начальном этапе движения груза отслеживают изменение ускорений, т.е. обрабатывают действия внешних факторов, а при достижении требуемых скоростей, необходимых для сброса груза, отслеживают их изменения, т.е. обрабатывают действия внутренних факторов.
Таким образом, отслеживание внешних и внутренних факторов позволяет повысить качество принудительного сброса груза, то есть сброс становится независимым от внешних и внутренних факторов.
Использование гидрораспределителей с двумя выходами и двухполостных гидроцилиндров гидротолкателей позволяет более эффективно как разгонять, так и тормозить гидротолкатели при их кратковременном движении.
Боковая ручка управления (варианты)
Высоковольтный выключатель нагрузки
Палладиево-медные катализаторы гомогенного селективного окисления тиольных групп, комбинация и композиция на их основе и способ терапевтического воздействия
Силовой мини-привод электрогидравлический
Биядерные координационные соединения биологически активных d-элементов с алифатическими тиолами как средства повышения эффективности лекарственных препаратов
Способ коррекции погрешностей аналого-цифрового преобразования и устройство для его осуществления
Гибридный электрогидравлический рулевой привод
Способ поворота транспортного средства со всеми управляемыми колесами
Система контроля и сбора данных потребления электроэнергии в сетях среднего и низкого напряжения цифрового района электрических сетей

