Результат интеллектуальной деятельности: Способ оценки точности управления технологическим оборудованием с механическим и гидравлическим приводом
Вид РИД
Изобретение
Изобретение относится к области моделирующих устройств, которые следует рассматривать как учебные или тренировочные устройства, вызывающие у обучающихся ощущения, идентичные ощущениям, возникающим при обращении с реальными устройствами, отличающиеся обеспечением записи или измерения характеристик обучаемого.
В настоящее время известны способы проведения психофизиологических исследований, направленные на измерение скорости и точности зрительно-моторного слежения человеком, основанные на демонстрации испытуемому динамических виртуальных мишеней и измерении времени задержки и упреждения реакции в виде нажатий испытуемым клавиш манипулятора при совпадении динамической мишени и цели. Однако, известные способы в силу своих особенностей не позволяют сформировать оценку развития профессионально-важных качеств операторов сложных технологических объектов. В частности, все известные способы в качестве устройства для регистрации реакции человека-оператора используют вычислительные машины с устройствами ввода в виде кнопок манипуляторов. При этом на практике при осуществлении зрительно-моторного слежения и управления технологическим оборудованием применяются более сложные устройства взаимодействия с человеком, такие как джойстики. При этом управление движением узлов технологического оборудования осуществляется не по релейному принципу (включено – выключено), а пропорционально величине отклонения рукояти джойстика от своего свободного положения. Это обусловлено тем, что в качестве движителя технологического оборудования в большинстве случаев используются гидравлические приводы с дросселирующими клапанами, причем отклонение рукояти джойстика от своего нормального положения вызывает изменение расхода гидравлической жидкости через эти клапаны. Кроме того, в силу инерционности процессов, происходящих в гидравлических и механических приводах технологического оборудования возникают задержки разгона и торможения технологического оборудования, а значит, психомоторная реакция управления реальным технологическим оборудованием является более сложной, для измерения которой необходимо моделировать нелинейности реального технологического оборудования.
Так, в частности, нагруженный гидромеханический привод таких устройств, как рукояти промышленных роботов, лесохозяйственной и строительной техники описывается математической моделью апериодического процесса [1], а их передаточная функция выглядит следующим образом:
 ,
,
где T – постоянная времени гидромеханического привода, описывающая инерционность переходного процесса, протекающего при управлении приводом; s – преобразование Лапласа. Апериодический характер процессов управления гидромеханическим приводом обусловлен конструктивным исполнением золотниковых гидрораспределительных клапанов, подающих гидравлическую жидкость в рабочий объем гидропривода, значение постоянной времени T при этом определяется по формуле:
где  – площадь проходного сечения клапана;
– площадь проходного сечения клапана;  – коэффициент расхода клапана;
– коэффициент расхода клапана;  – ширина окон, открываемых при перемещении регулирующего органа клапана;
– ширина окон, открываемых при перемещении регулирующего органа клапана;  – разность давлений в подающем и принимающем трубопроводе;
– разность давлений в подающем и принимающем трубопроводе;  – плотность жидкости. При этом следует заметить, что физически невозможно реализовать безынерционный клапан, т.е. величина инерционности хоть и зависит от конструкции системы управления, однако присутствует во всех системах, оснащенных гидромеханическим приводом. При этом во всех известных способах проведения психофизиологических исследований принято допущение о безынерционнсти управления подвижными объектами. С точки зрения медицинской практики такое допущение оправдано, поскольку позволяет оценивать с высокой точностью динамику процессов возбуждения и торможения в нервной системе испытуемого. Однако, с точки зрения инженерной психологии и теории человеко-машинных систем, такое допущение значительно искажает результаты измерения эффективности человеко-машинного взаимодействия в условиях управления технологическим оборудованием с механическим и гидравлическим приводом. Этот факт обуславливает значительную разницу между прогнозным значением развития профессионально-важных качеств операторов, полученным путем измерения известными способами и реальным значением, полученным в ходе работы на реальном технологическом оборудовании.
– плотность жидкости. При этом следует заметить, что физически невозможно реализовать безынерционный клапан, т.е. величина инерционности хоть и зависит от конструкции системы управления, однако присутствует во всех системах, оснащенных гидромеханическим приводом. При этом во всех известных способах проведения психофизиологических исследований принято допущение о безынерционнсти управления подвижными объектами. С точки зрения медицинской практики такое допущение оправдано, поскольку позволяет оценивать с высокой точностью динамику процессов возбуждения и торможения в нервной системе испытуемого. Однако, с точки зрения инженерной психологии и теории человеко-машинных систем, такое допущение значительно искажает результаты измерения эффективности человеко-машинного взаимодействия в условиях управления технологическим оборудованием с механическим и гидравлическим приводом. Этот факт обуславливает значительную разницу между прогнозным значением развития профессионально-важных качеств операторов, полученным путем измерения известными способами и реальным значением, полученным в ходе работы на реальном технологическом оборудовании.
Известен способ отбора для занятий единоборствами [2], при котором испытуемому предъявляют на экране видеомонитора окружность, на которой помещена метка и точечный объект, движущийся по окружности. Испытуемый, наблюдая за движением точечного объекта, в момент предполагаемого совпадения его положения с меткой нажатием кнопки «Стоп» останавливает движение точечного объекта по окружности. Затем вычисляют ошибку несовпадения точечного объекта и метки - время ошибки запаздывания с положительным знаком или упреждения с отрицательным знаком, и через заданное время возобновляют движение точечного объекта по окружности. Испытуемый выполняет описанную процедуру заданное число раз, после чего строят вариационный ряд ошибок несовпадения точечного объекта и метки, вычисляют вариационный размах ряда и отмечают на числовой оси отрезок, ограниченный наибольшим и наименьшим членами вариационного ряда. Способ позволяет оценить быстроту и точность двигательных действий испытуемого, однако, не дает представления о способности человека воспринимать и прогнозировать движения объекта наблюдения с ускорением или в условиях задержек реального технологического оборудования.
Известен способ определения времени реакции человека на движущийся по направлению от него объект [3], при котором испытуемому предъявляют на экране видеомонитора замкнутый контур, являющийся ограничивающим, внутри которого расположен тестовый объект аналогичной конфигурации. Тестовый объект увеличивают соответственно заданной скорости, имитируя движение его навстречу испытуемому. В момент предполагаемого совпадения размеров ограничивающего замкнутого контура и тестового объекта испытуемый нажатием кнопки «Стоп» останавливает увеличение диаметра тестового объекта. Затем вычисляют ошибку несовпадения диаметров тестового объекта и ограничивающего контура - время ошибки запаздывания с положительным знаком или упреждения - с отрицательным знаком и через заданное время вновь предъявляют испытуемому замкнутый контур, внутри которого расположен тестовый объект начальных размеров и конфигурации. Затем вычисляют время реакции Tp человека на движущийся объект как среднеарифметическое значение по формуле:
 ,
,
где ti - i-я ошибка запаздывания с положительным знаком или упреждения с отрицательным, знаком, мс; n - количество испытаний, при этом замкнутый контур одновременно с увеличением тестового объекта уменьшают в диаметре с заданной скоростью, затем уменьшение диаметра замкнутого контура останавливают нажатием кнопки «Стоп», а затем через заданное время предъявляют испытуемому замкнутый контур начального размера.
Известен способ оценки зрительно-моторной реакции на движение объекта в пространстве [4], при котором испытуемый визуально наблюдает движущийся объект и реагирует на прохождение объекта через «финишный створ» нажатием на кнопку, причем в качестве объекта наблюдения используют движущийся по желобу металлический шарик, проходящий последовательно через два индукционных датчика, первый - запускающий электросекундомер и второй, расположенный на уровне «финишного створа», останавливающий секундомер в момент его прохождения, устанавливая стандартное время прохождения шариком расстояния между двумя датчиками, затем второй индукционный датчик отключают, а испытуемый останавливает секундомер в момент визуального прохождения шариком «финишного створа», нажимая на кнопку.
Известен способ определения способности к предвидению хода событий [5], при котором путем испытуемому на экране видеомонитора предъявляют окружность, на которой помещена метка и точечный объект. Точечный объект движется с заданной скоростью по окружности, за заданное время до достижения метки исчезает с экрана видеомонитора, при этом движение точечного объекта по окружности продолжается. В момент предполагаемого совпадения положения движущегося точечного объекта с метким испытуемым нажатием кнопки «Стоп» останавливает движение точечного объекта по окружности и точечный объект снова появляется на экране видеомонитора, в том месте, где было остановлено его движение. Затем вычисляют ошибку несовпадения точечного объекта и метки - время ошибки запаздывания с положительным знаком или упреждения с отрицательным знаком, и через заданное время возобновляют движение точечного объекта по окружности. Описанную процедуру повторяют заданное число раз, после чего вычисляют способность к прогнозированию положения движущегося объекта относительно метки Тпрог как среднеарифметическое значение по формуле:
 ,
,
где ti - i-я ошибка запаздывания с положительным знаком или упреждения с отрицательным знаком, мс; n - число остановок точечного объекта в области положения метки.
Недостатком известных способов являются их низкая достоверность, поскольку данные способы используют единую идеальную модель человеко-машинного взаимодействия, исключающую из рассмотрения инерционность машины и устройств человеко-машинного взаимодействия. Данные способы в силу названных недостатков не позволяют обеспечить требуемую достоверность оценки точности управления технологическим оборудованием с механическим и гидравлическим приводом, например, манипуляторов лесозаготовительной техники.
Наиболее близким по технической сущности к предъявляемому способу является способ тестирования реакции человека на движущийся объект [6], при котором испытуемому предъявляют на экране видеомонитора прямую горизонтальную линию с меткой, расположенной в конце линии, и движущийся по линии точечный объект, который проходит путь от начала линии до метки за 1 с. В момент предполагаемого совпадения положения точечного объекта с меткой испытуемый нажатием кнопки «Стоп» останавливает движение точечного объекта. В момент нажатия кнопки «Стоп» вычисляют ошибку несовпадения положений точечного объекта и метки - время ошибки запаздывания, взятое с положительным знаком, или время ошибки упреждения, взятое с отрицательным знаком, и через 1 с возобновляют движение точечного объекта по линии. Описанную процедуру повторяют заданное число раз, после чего вычисляют среднеарифметическое значение ошибок запаздывания и среднеарифметическое значение ошибок упреждения. По сопоставлению рассчитанных среднеарифметических значений судят о взаимоотношении процессов возбуждения и торможения в коре головного мозга.
Недостатком данного способа также является невозможность оценки скорости и точности реализации моторных программ испытуемым в условиях инерционности технологического оборудования, то есть его низкая достоверность.
Технический результат предлагаемого решения заключается в повышении достоверности известного способа за счет измерения точности реализации программ моторного слежения человеком в условиях задержек и пропорционального управления скоростью движения объекта наблюдения отклонением рукояти манипулятора, что позволяет оценивать точность управления испытуемым реальным технологическим оборудованием с механическим и гидравлическим приводом.
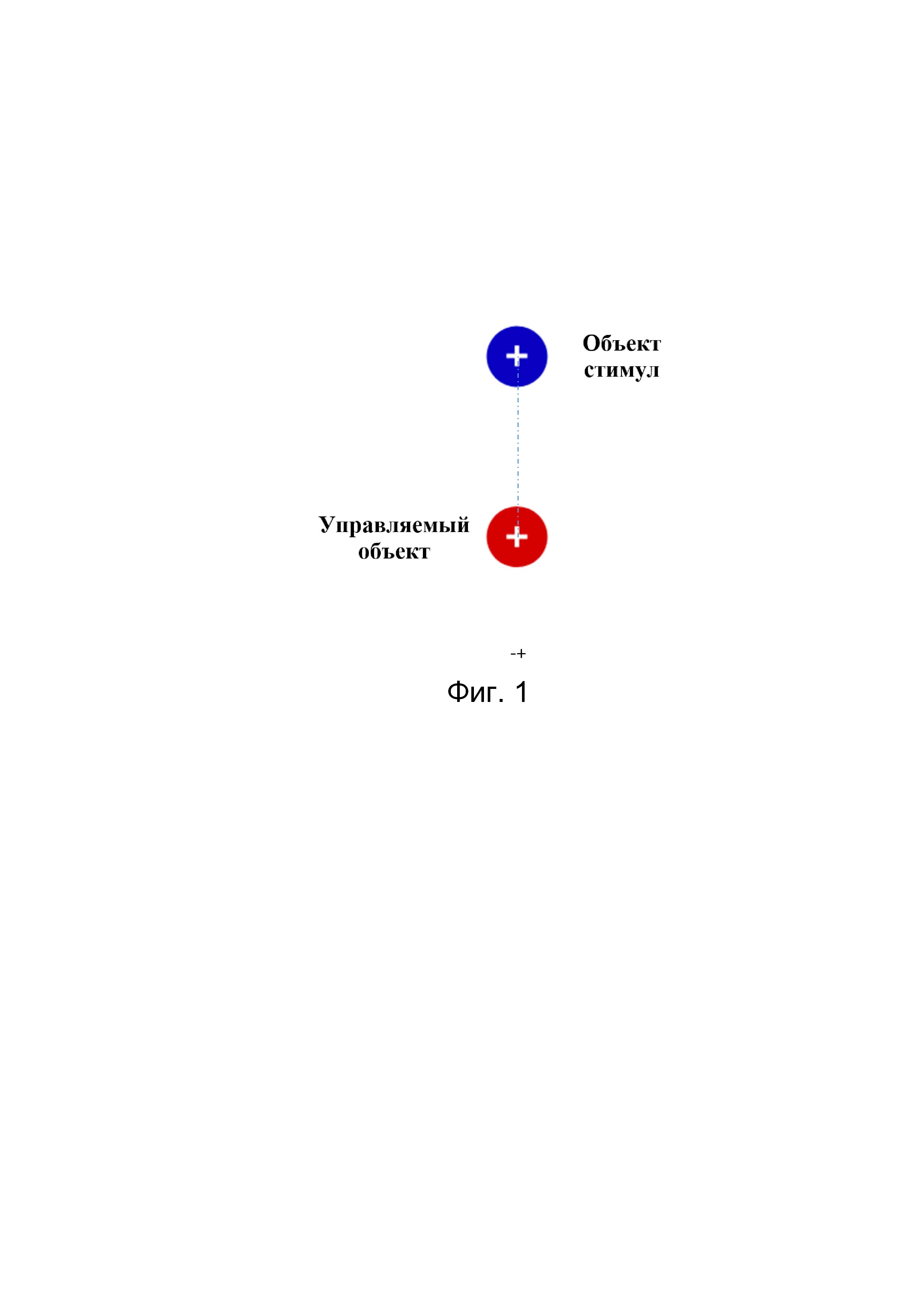
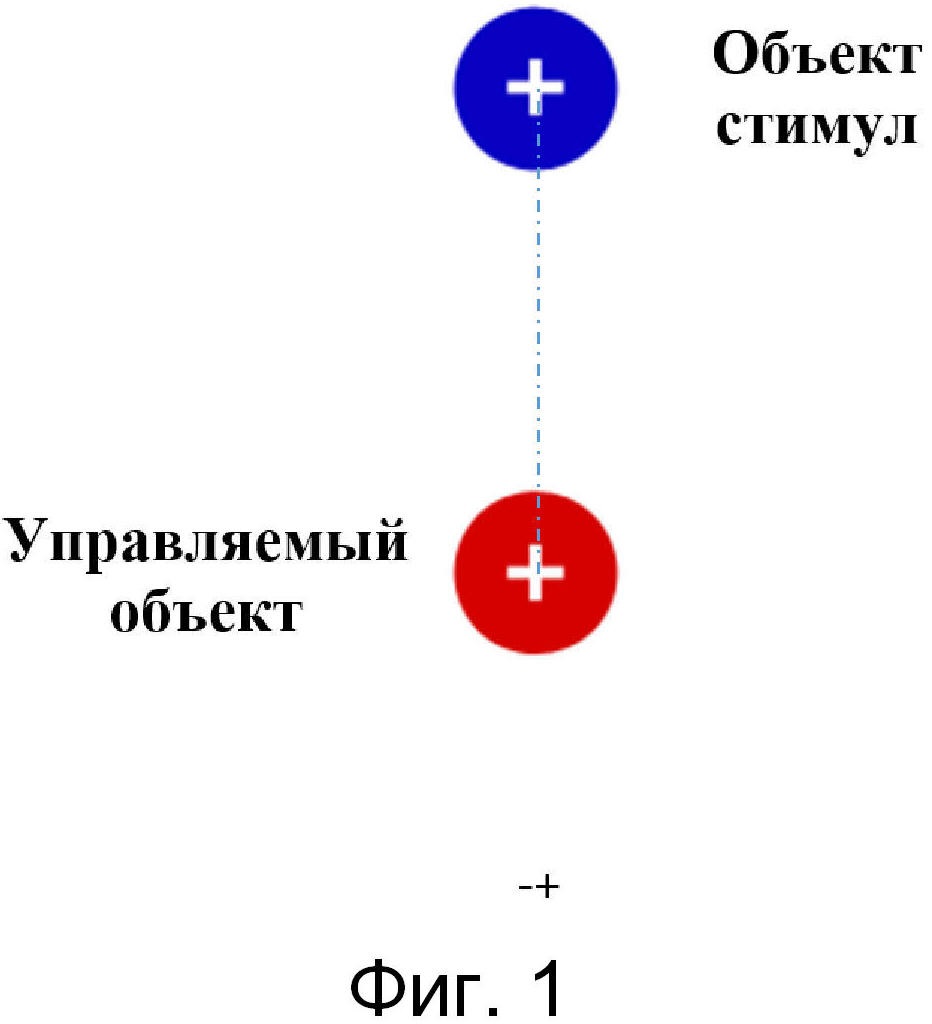
Указанный технический результат достигается тем, что испытуемому на экране видеомонитора предъявляют объект стимул в виде синего круга заданного диаметра с отмеченным центром, а также управляемый объект в виде красного круга с отмеченным центром того же диаметра, что и стимул,
причем новым является то, что испытуемый с помощью манипулятора типа «джойстик» с рукоятью в начальном центральном положении, находящемся в руке испытуемого управляет движением управляемого объекта по вертикальной траектории с учетом постоянной времени отклика манипулятора Т, вычисляемого по формуле:
где T – коэффициент задержки отклика манипулятора в диапазоне от 0,1 до 2; x – величина отклонения рукояти манипулятора от нулевого положения; y – скорость перемещения управляемого объекта;
и совмещает центры объекта стимула и управляемого объекта, а в момент предполагаемого совмещения испытуемый нажимает кнопку манипулятора «Готов», после чего измеряют ошибку наведения, равную расстоянию между центрами объекта стимула и управляемого объекта в момент нажатия кнопки «Готов» и время, затраченное испытуемым на прохождение испытания,
после чего тест повторяют заданное количество раз и вычисляют время реализации моторного слежения Тмс по формуле:
 ,
,
где ti – время, затраченное на прохождение i-го испытания, с; n - количество испытаний,
точности реализации программы моторного слежения Емс по формуле:
 ,
,
где еi – ошибка наведения в i-м испытании, пункты; n - количество испытаний.
На фиг. 1 представлено схематическое изображение экрана видеомонитора испытуемого при наведении управляемого объекта на объект стимул.
Предлагаемый способ оценки точности управления технологическим оборудованием с механическим и гидравлическим приводом осуществляется следующим образом.
На первом этапе в центре экрана видеомонитора испытуемого отображают объект стимул и управляемый объект, рука испытуемого располагается на рукояти манипулятора типа «джойстик» с рукоятью в начальном центральном положении.
На втором этапе при нажатии испытуемым на манипуляторе кнопки «Готов» автоматизировано начинают отсчет времени выполнения теста и разрешают движение управляемого объекта с задержкой относительно движения рукояти манипулятора, причем скорость перемещения управляемого объекта по вертикальной оси Y соответствует отклонению рукояти в положительном направлении по оси Y.
На третьем этапе испытуемый реализует программу вертикального перемещения, как можно скорее и как можно точнее совмещая центры объекта стимула и управляемого объекта путем отклонения рукояти манипулятора. При этом на экране видеомонитора в режиме реального времени отображают положение управляемого объекта, соответствующее отклонению рукояти джойстика с учетом постоянной времени отклика манипулятора Т, вычисляемого по формуле:
 ,
,
где T – коэффициент задержки отклика манипулятора в диапазоне от 0,1 до 2; x – величина отклонения рукояти манипулятора от нулевого положения; y – скорость перемещения управляемого объекта;
На четвертом этапе после наведения управляемого объекта на объект стимул испытуемый нажимает кнопку манипулятора «Готов», после чего заканчивают отсчет времени, затраченного испытуемым на реализацию программы моторного слежения и вычисляют ошибку наведения управляемого объекта, равную расстоянию в пунктах от центра управляемого объекта до центра объекта стимула, после чего тест повторяют с первого этапа заданное количество раз.
На пятом этапе вычисляют точность управления технологическим оборудованием в виде интегрального показателя скорости моторного слежения Тмс и точности моторного слежения Емс соответственно по формулам:
,
где ti – время, затраченное на прохождение i-го испытания, с; n - количество испытаний,
,
где еi – ошибка наведения прицела в i-м испытании, пункты; n - количество испытаний.
Предлагаемый способ оценки точности управления технологическим оборудованием с механическим и гидравлическим приводом позволяет расширить функциональные возможности способов за счет измерения интегральных показателей времени и точности вертикального перемещения оператором подвижными объектами в процессе профессиональной подготовки операторов на различных ее этапах.
Литература
1. Попов Д.Н. Механика гидро- и пневмоприводов: учебник для вузов / Д.Н. Попов — 2-е изд., стер. — М.: Изд-во МГТУ им. Н. Э. Баумана, 2001. – 320 с.
2. Патент № 2540164 РФ A61B5/16. Способ отбора для занятий единоборствами // Мамаева А.В. (РФ), Закамский А.В. (РФ), Полевщиков М.М. (РФ), Роженцов В.В. (РФ). Заявка: 2013148546/14, 30.10.2013 Опубл. 10.02.2015, Бюл. № 4.
3. Патент № 2497452 РФ A61B5/16. Способ определения времени реакции человека на движущийся по направлению от него объект // Курасов П.А. (РФ), Петухов И.В. (РФ). Заявка: 2012104099/14, 06.02.2012 Опубл. 20.08.2013, Бюл. № 23.
4. Патент № 2525638 РФ A61B5/16. Способ оценки зрительно-моторной реакции на движение объекта в пространстве // Левашов О.В. (РФ), Павлов С.Ф. (РФ). Заявка 2013124413/14, 28.05.2013 Опубл. 20.08.2014, Бюл. № 23.
5. Патент № 2381742 РФ A61B5/16. Способ определения способности к предвидению хода событий // Петухов И.В. (РФ). Заявка: 2008146586/14, 25.11.2008 Опубл. 20.02.2010, Бюл. № 5.
6. Патент № 2386395 РФ A61B5/16. Способ определения времени реакции человека на движущийся объект // Лежнина Т.А. (РФ), Роженцов В.В. (РФ). Заявка: 2008115066/14, 16.04.2008 Опубл. 27.10.2009, Бюл. № 30.


Глушитель
Устройство для получения арболита
Рабочий орган машины для срезания кустарника и поросли
Перекатываемая емкость лесного пожарного агрегата
Плавучее рыбозащитное устройство
Центробежный измельчитель
Цифровой вычислительный синтезатор с частотной модуляцией
Лесопожарный грунтомет
Ножной бур для образования посадочных лунок
Способ контроля скорости формирования тонких пленок на различном расстоянии от источника материала
Способ тестирования двигательных способностей человека
Способ автоматизированного принятия решений по назначению деревьев в рубку при их обработке лесозаготовительной машиной
Способ оценки и тренировки умения видеть поле действий
Способ для выявления асимметрий движений
Способ исследования зрительно-моторного слежения
Способ оценки точности трехкоординатного управления
Способ определения времени реакции человека на движущиеся объекты
Способ оценки динамики развития эффективности зрительно-моторных реакций
Способ диагностики и развития уровня когнитивно-моторных способностей человека
Устройство для обучения управлению подвижными объектами с помощью джойстиков

