Результат интеллектуальной деятельности: БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ БЛОК
Вид РИД
Изобретение
Изобретение относится к области измерительной техники и приборостроения и может быть использовано в летательных аппаратах (самолетах и космических летательных аппаратах), наземных и морских транспортных средствах для измерения векторов линейного ускорения и угловой скорости.
Известен блок преобразователей механической величины в виде линейного ускорения или угловой скорости (патент РФ №2432548), в котором использованы шесть однотипных преобразователей механической величины, например, акселерометров или датчиков угловой скорости (ДУС), измерительные оси (ИО) которых ориентированы по многограннику (додекаэдру). Направление ИО каждого измерителя механической величины совпадает с нормалью к грани додекаэдра. Причем на одной из граней пары граней из шести пар граней додекаэдра, параллельных друг другу, установлено по одному преобразователю механической величины.
Недостатком этой конфигурации является невозможность одновременного измерения параметров движения: линейного ускорения и угловой скорости, так как в изделии устанавливается шесть преобразователей одного типа.
Задачей предлагаемого изобретения является создание бесплатформенного инерциального блока, который будет измерять проекции вектора линейного ускорения и вектора угловой скорости и позволит повысить точность и надежность бесплатформенной инерциальной навигационной системы (БИНС).
Поставленная задача достигается тем, что известный прототип, в котором установлены шесть однотипных преобразователей механической величины, шесть акселерометров или шесть ДУС, ориентированных по додекаэдру, причем на одной из граней пары граней из шести пар граней додекаэдра, параллельных друг другу, установлено по одному преобразователю механической величины с направлением ИО относительно нормали к грани додекаэдра, дополнен тем, что в нем установлены шесть акселерометров и шесть ДУС, причем ИО центрального ДУС совпадает с нормалью к грани додекаэдра и с осью направления движения объекта в связанной с объектом движения системе координат, ИО остальных пяти ДУС направлены по нормалям к каждой из пяти граней додекаэдра, примыкающих к грани додекаэдра центрального ДУС, ИО центрального акселерометра совпадает с нормалью к грани додекаэдра и отклонена от оси направления движения объекта на угол 25°, ИО остальных пяти акселерометров направлены по нормалям к каждой из пяти граней додекаэдра, примыкающих к грани додекаэдра центрального акселерометра, таким образом, ИО акселерометров, ориентированные по додекаэдру акселерометров отклонены от ИО ДУС, ориентированных по додекаэдру ДУС на угол 25°.
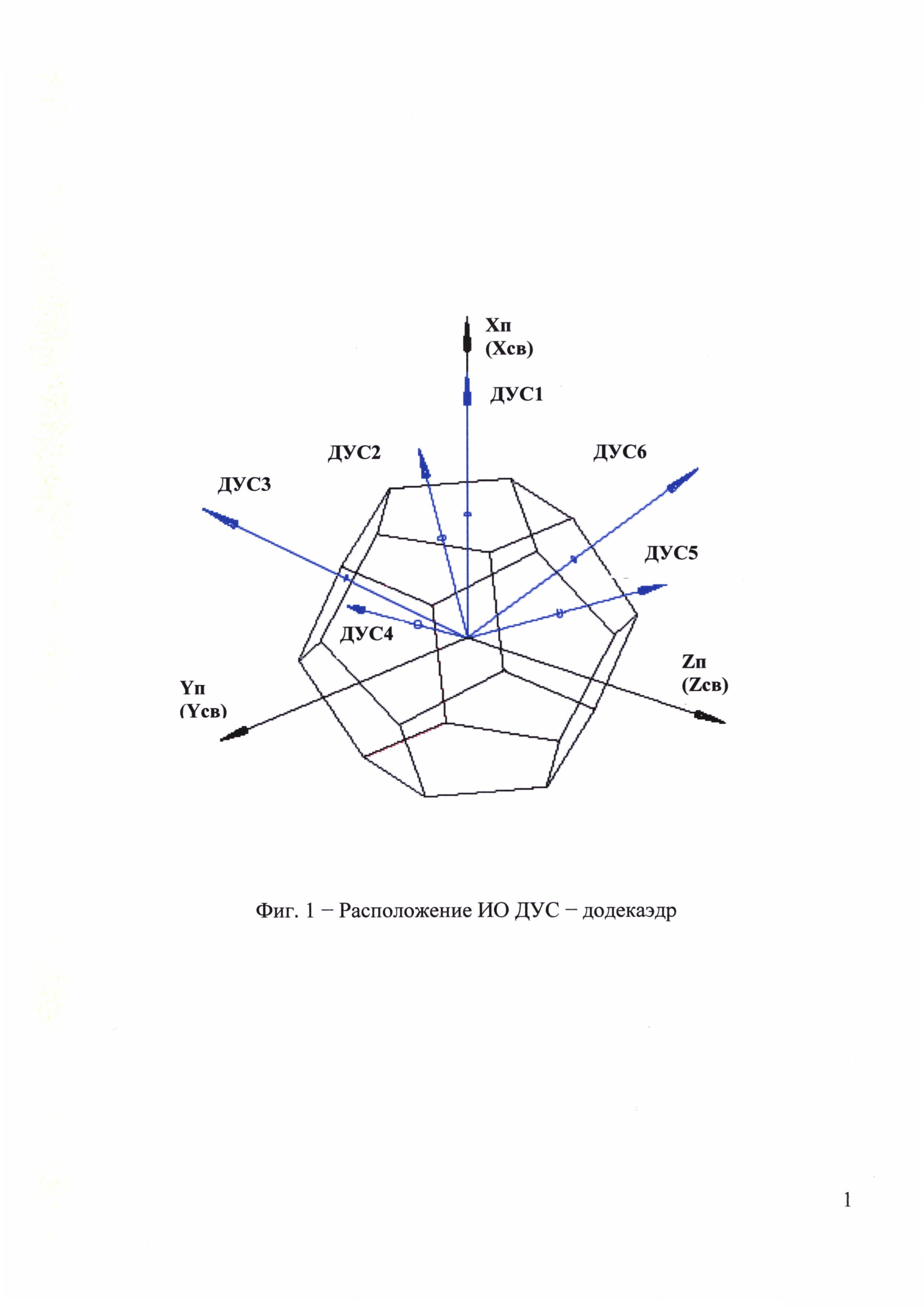
На фиг. 1 приведено расположение ИО ДУС, где принимается, что XпYпZп - приборная система координат (ПСК) БИНС с точностью до технологических погрешностей установки совпадает с XсвYсвZсв - связанной системой координат (ССК) объекта движения.
Конфигурация, в основе которой используется додекаэдр - правильный двенадцатигранник, каждая грань которого представляет собой правильный пятиугольник, строится на ИО шести ДУС (ДУСi, i=1, 2…6). ИО ДУС направлены по нормалям к попарно непараллельным граням додекаэдра.
Для расположения конфигурации додекаэдра ИО ДУС в ССК объекта (XсвYсвZсв) принимается положение, согласно которому ИО центрального в конфигурации ДУС1 совпадает с осью ОХп. Причем, ИО i=1 (ДУС1) это продольная ось ОХп (ОХсв) объекта. ИО центрального в конфигурации ДУС1 совпадает с нормалью к грани додекаэдра. Другие пять ИО ДУС с индексами i=2…6 расположены по нормалям к каждой из пяти граней додекаэдра, примыкающих к грани додекаэдра центрального ДУС1.
Принимается, что одна из осей, а именно i=6 (ДУС6), лежит в плоскости (XпOYп), таким образом ИО ДУС6 лежит в плоскости XпOYп, а ИО ДУС с индексами i=2…6 составляют с плоскостью основания, которая перпендикулярна плоскости ОХп, угол 26°34'.
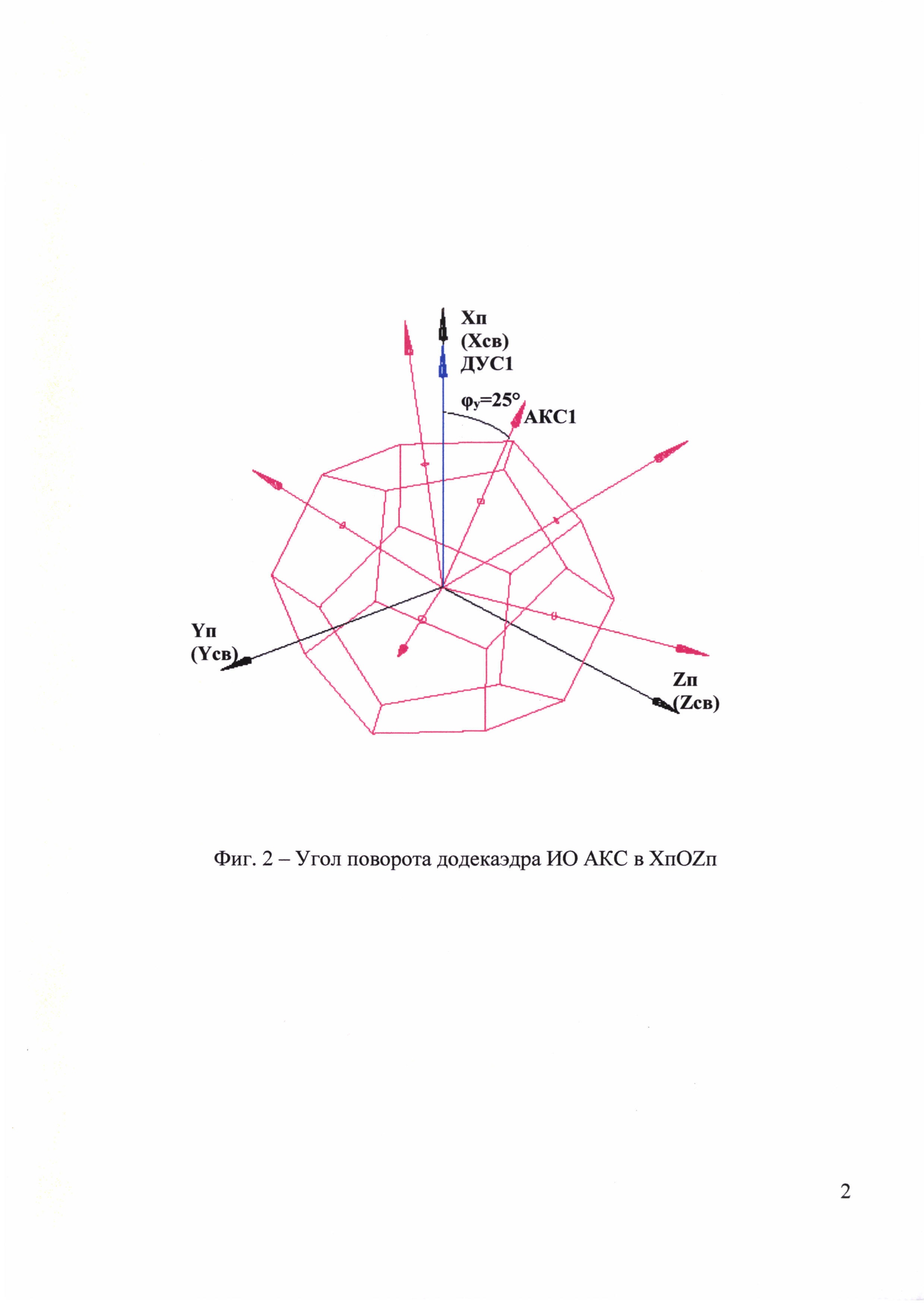
Додекаэдр ИО акселерометров строится на шести акселерометрах (АКСi, i=1, 2…6) по аналогии с додекаэдром ДУС. ИО центрального акселерометра совпадает с нормалью к грани додекаэдра и отклонена от оси направления движения объекта на угол 25°. ИО остальных пяти акселерометров направлены по нормалям к каждой из пяти граней додекаэдра, примыкающих к грани додекаэдра центрального акселерометра.
На фиг. 2 показан угол ϕу, где ϕу - угол поворота додекаэдра ИО акселерометров относительно оси OYсв в плоскости XпOZп, причем угол ϕу=25°.
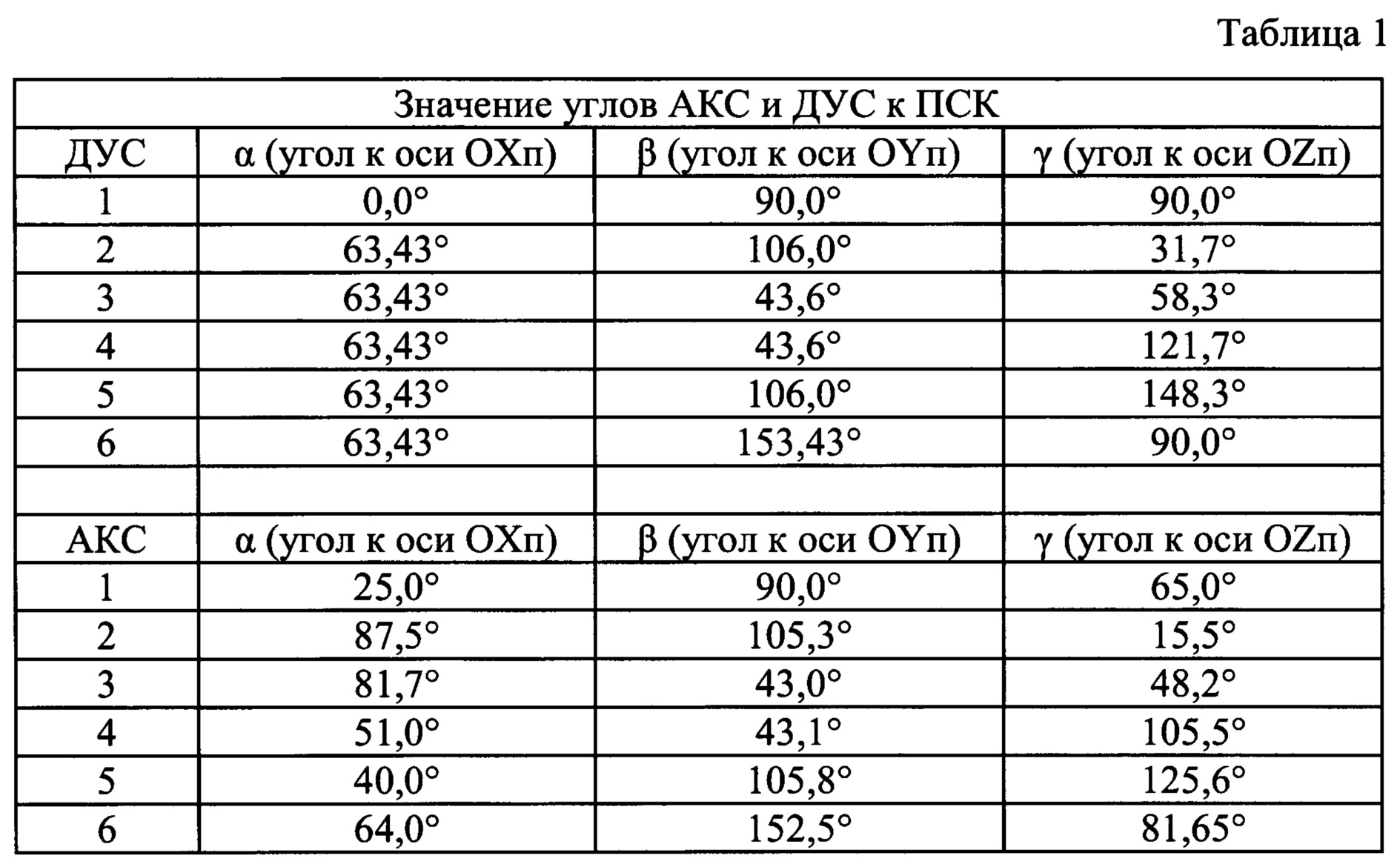
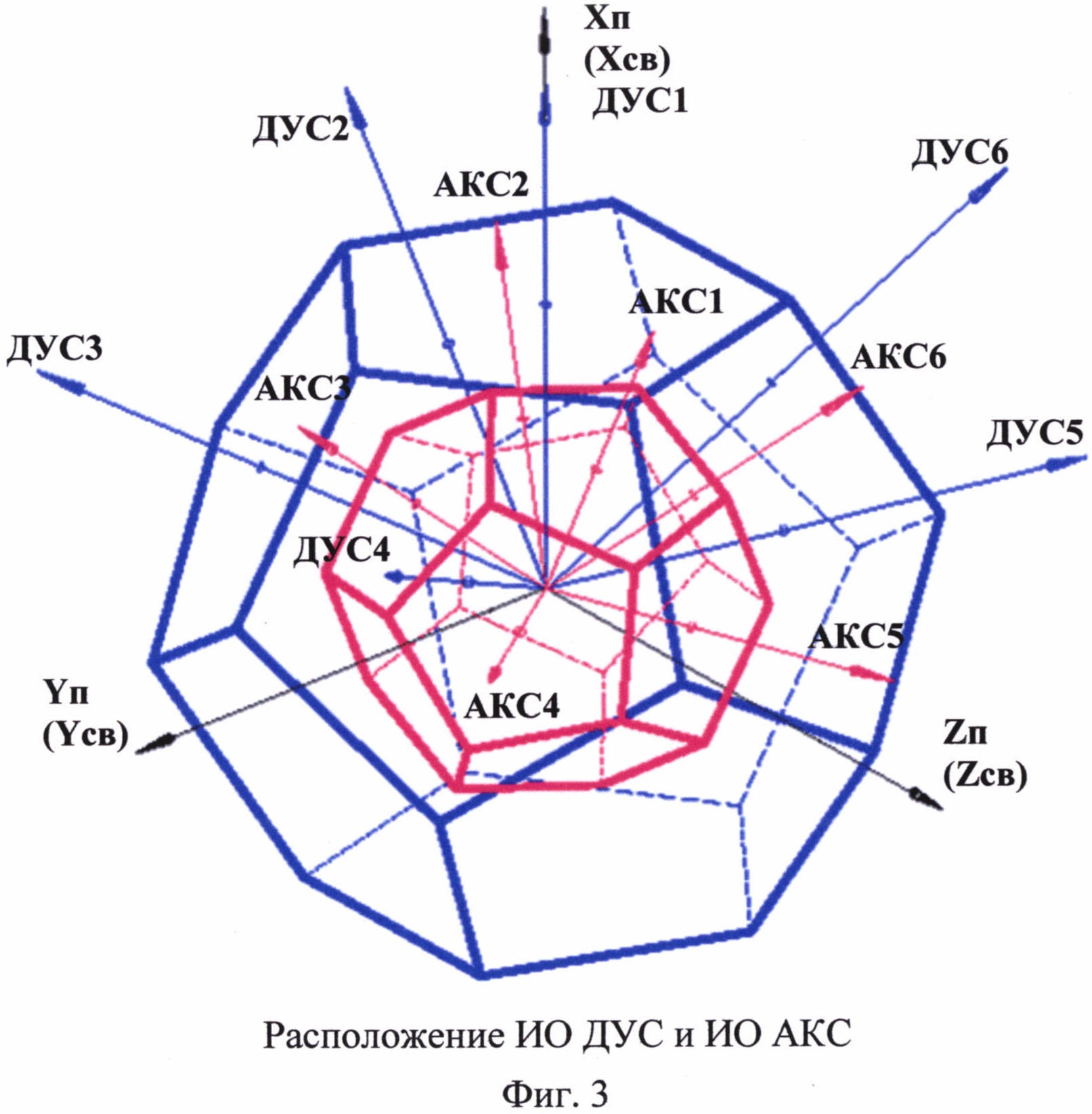
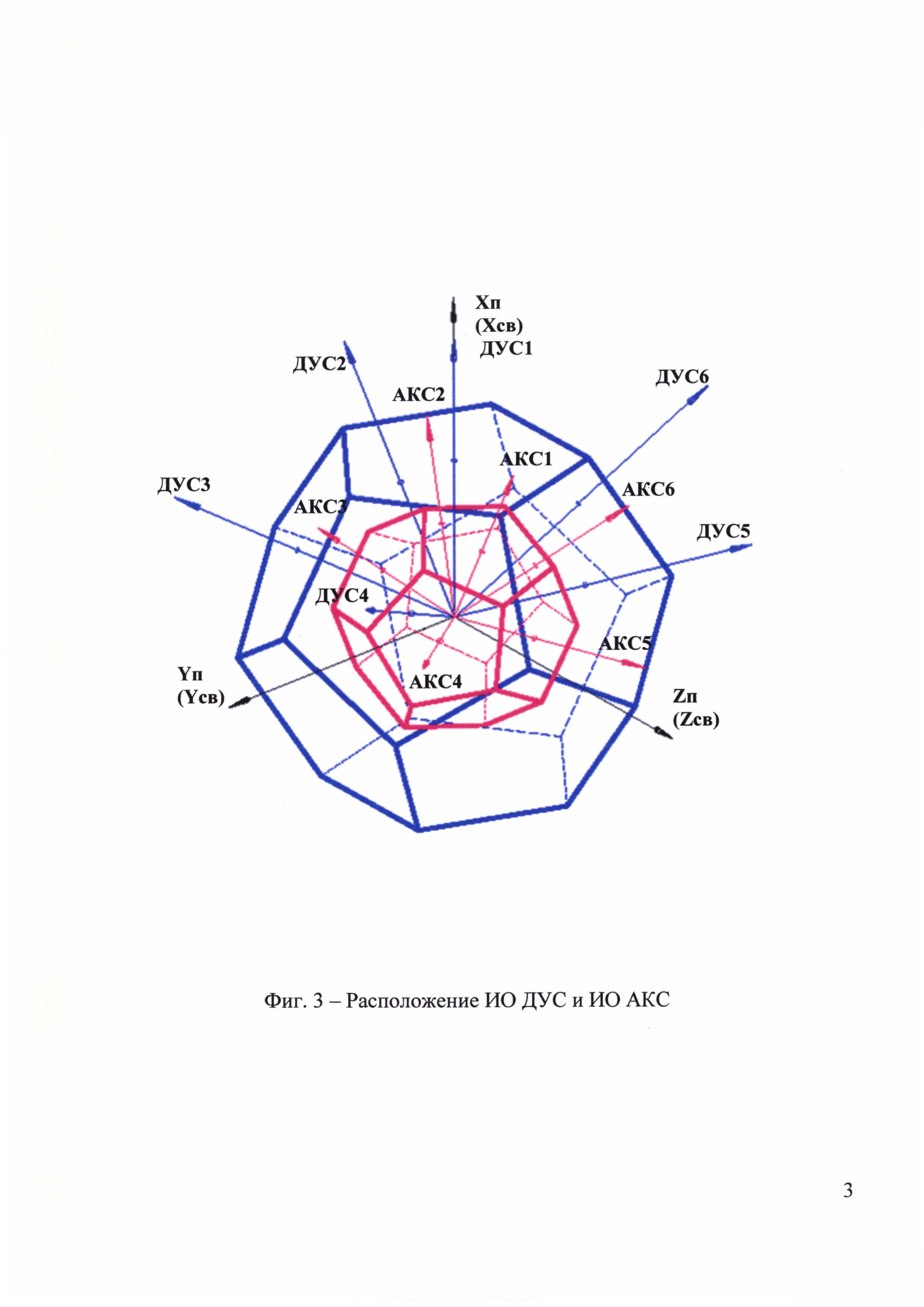
На фиг. 3 приведено положение додекаэдра ИО акселерометров и додекаэдра ИО ДУС, при котором угол между направлениями любых двух соседних ИО (ДУС1, … ДУС6) и ИО (АКС1, … АКС6) оказывается равным 63°26'18'', а угол между любыми двумя соседними гранями додекаэдра равен 116°33'42''. Тогда значения углов ориентации ИО ДУС и ИО акселерометров относительно ПСК составляют значения, приведенные в таблице 1, где α - угол ИО АКС и ДУС к оси ОХп, β - угол ИО АКС и ДУС к оси OYп, γ - угол ИО АКС и ДУС к оси OZп.
Таким образом, акселерометры и ДУС установлены в изделии таким образом, что ИО акселерометров, ориентированные по додекаэдру акселерометров отклонены от ИО ДУС, ориентированных по додекаэдру ДУС на угол 25°.
Установка ИО акселерометров под углом относительно оси OYсв в плоскости связанной с БИНС, целесообразна так же за счет того, что ИО трех из шести акселерометров занимают приблизительно одинаковое (с точностью до погрешности установки) угловое положение относительно оси ОХсв. Таким образом, измерения данными акселерометрами кажущегося ускорения вдоль направления полета летательного аппарата будут приблизительно равны. Выход из строя какого-либо из них не окажет заметного влияния на функционирование системы управления, то есть за счет такого поворота повышается точность и надежность БИНС.
Таким образом, предложен бесплатформенный инерциальный блок, особенность которого заключается в том, что в нем, в отличии от прототипа, установлены шесть акселерометров и шесть ДУС, причем ИО центрального ДУС совпадает с нормалью к грани додекаэдра и с осью направления движения объекта в связанной с объектом движения системе координат, ИО остальных пяти ДУС направлены по нормалям к каждой из пяти граней додекаэдра, примыкающих к грани додекаэдра центрального ДУС, ИО центрального акселерометра совпадает с нормалью к грани додекаэдра и отклонена от оси направления движения объекта на угол 25°, ИО остальных пяти акселерометров направлены по нормалям к каждой из пяти граней додекаэдра, примыкающих к грани додекаэдра центрального акселерометра, таким образом, ИО акселерометров, ориентированные по додекаэдру акселерометров отклонены от ИО ДУС, ориентированных по додекаэдру ДУС на угол 25°.
Предлагаемый бесплатформенный инерциальный блок позволяет повысить точность и надежность БИНС за счет избыточности измерителей и за счет рационального выбора конфигурации ориентации ИО.
Бесплатформенный инерциальный блок
Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей
Способ управления программным разворотом разгонного блока
Способ компенсации потери тяги двигателями ориентации разгонного блока
Перестраиваемое мажоритарное устройство
Устройство для формирования установочного импульса
Планетарно-цевочный электропривод
Способ управления программным разворотом разгонного блока
Волновой твердотельный гироскоп
Перестраиваемое мажоритарное устройство

