Результат интеллектуальной деятельности: Устройство позиционирования транспортных средств
Вид РИД
Изобретение
Изобретение относится к устройствам навигации и может быть использовано для определения местоположения транспортных средств, движущихся по известным траекториям.
Известна бесплатформенная инерциальная навигационная система для быстровращающихся объектов, содержащая подключенные к вычислителю навигационных параметров измерители параметров объекта, выполненные в виде установленных в корпусе объекта пяти акселерометров, датчика угловой скорости и термодатчика, причем оси чувствительности первой пары акселерометров ориентированы в одной плоскости с осью быстрого вращения объекта и отклонены от нее в разных направлениях на угол 45°, оси чувствительности второй пары акселерометров ориентированы в противоположные стороны в направлении, параллельном оси, проходящей через центры установочных отверстий в корпусе объекта, ось чувствительности пятого акселерометра ориентирована в направлении, параллельном оси, ортогональной оси быстрого вращения объекта, и оси, проходящей через центры установочных отверстий в корпусе, а ось чувствительности датчика угловой скорости ориентирована вдоль оси, проходящей через центры установочных отверстий в корпусе объекта, при этом информационные выходы пяти акселерометров, датчика угловой скорости и термодатчика подключены к информационным входам микропроцессора (RU2256881, G01C 21/16, 20.07.05).
К недостаткам данной навигационной системы следует отнести ее сложность и недостаточно высокую точность измерений.
В качестве прототипа принято устройство для определения навигационных параметров управляемых подвижных объектов, содержащее блок акселерометров и блок датчиков угловой скорости, установленные в двухосный карданов подвес на стабилизированной приборной площадке исполнительные элементы систем стабилизации, установленные на осях карданова подвеса и управляемые с помощью вычислительного устройства, при этом каждый из указанных блоков характеризуется соответствующими тремя измерительными осями; выходы блока акселерометров и блока датчиков угловой скорости соединены с соответствующими входами вычислительного устройства, выходы которого связаны с соответствующими входами потребителей навигационных параметров, на внутренней и наружной осях карданова подвеса приборной площадки установлены датчики угла для измерения углового положения корпуса управляемого подвижного объекта относительно приборной площадки и исполнительные элементы-датчики момента для статической стабилизации приборной площадки в инерциальном пространстве, вычислительное устройство дополнительно содержит блок косинуса, блок синуса, первый блок умножения, реализующий операцию перемножения сигнала с выхода блока косинуса и сигнала с первого выхода блока датчиков угловой скорости; второй блок умножения, реализующий операцию перемножения сигнала с выхода блока синуса и сигнала со второго выхода блока датчиков угловой скорости; блок суммирования, реализующий операцию суммирования сигналов с выходов первого и второго блоков умножения; первый блок коррекции, вход которого связан с третьим выходом блока датчиков угловой скорости, а выход связан через первый усилитель с входом датчика момента внутренней оси, второй блок коррекции, вход которого связан с выходом блока суммирования, а выход через второй усилитель связан с входом датчика момента наружной оси; вычислительное устройство имеет два дополнительных входа, связанных соответственно с выходами датчиков углов; выход датчика угла внутренней оси связан также с входами блоков синуса и косинуса; в блоке датчиков угловой скорости, формирующем сигналы для определения навигационных параметров и для стабилизации ПП, установлены либо три двухстепенных датчиков угловой скорости, либо два датчика угловой скорости, один из которых двухстепенной, а другой трехстепенной, кроме того, устройство содержит астатические звенья в системах стабилизации для осуществления режима калибровок акселерометров и датчиков угловой скорости (RU2339002, G01C 21/24, 20.11.08).
Недостатками известного устройства являются большой объем аппаратурных затрат при формировании измерительного комплекса транспортного средства, большой объем вычислительных затрат при решении его навигационной задачи, а также недостаточно высокая точность измерений.
Технический результат изобретения заключается в уменьшении аппаратурных и вычислительных затрат при определении текущих координат транспортных средств, движущихся по известным траекториям, а также повышение точности позиционирования.
Технический результат достигается тем, что в устройство позиционирования транспортных средств, содержащее измеритель трех ортогональных проекций скорости транспортного средства и вычислительный блок, согласно изобретению введены вычислитель модуля скорости, интегратор и блок памяти, в который записана картографическая информация о возможных траекториях движения транспортного средства, разделенных на участки ортодромическими отрезками, при этом выход измерителя трех ортогональных проекций скорости транспортного средства подключен ко входу вычислителя модуля скорости, выход которого соединен со входом интегратора, а вычислительный блок выполнен в виде двух соединенных между собой микропроцессоров, подключенных к блоку памяти, вход первого микропроцессора соединен с выходом интегратора, а его дополнительный выход подключен к управляющему входу блока памяти, выходы микропроцессоров являются выходами устройства.
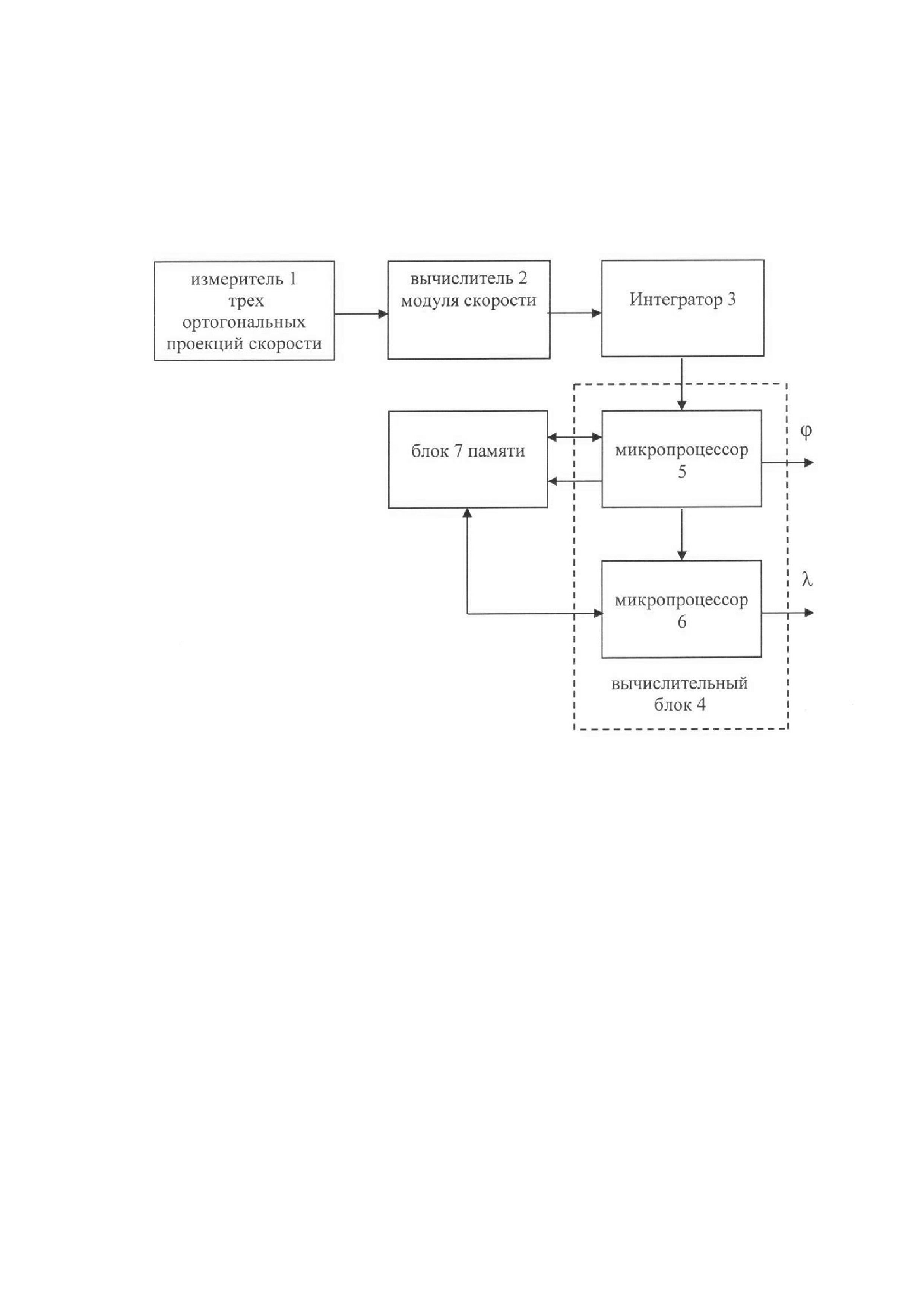
На чертеже представлена функциональная схема устройства позиционирования транспортных средств.
Устройство позиционирования транспортных средств содержит измеритель 1 трех ортогональных проекций скорости транспортного средства выход которого подключен ко входу вычислителя 2 модуля скорости, соединенного со входом интегратора 3, вычислительный блок 4, выполненный в виде двух соединенных между собой микропроцессоров 5 и 6, подключенных к блоку 7 памяти, вход первого микропроцессора 5 соединен с выходом интегратора 3, а его дополнительный выход подключен к управляющему входу блока 7 памяти, выходы микропроцессоров 5 и 6 являются выходами устройства, на которых формируются значения соответственно широты и долготы транспортного средства.
В основу работы устройства положены следующие теоретические результаты.
Во-первых, при организации работы устройства используется тот факт, что на ортодромическом отрезке траектории существует функциональная зависимость между текущими долготой λ и широтой φ объекта (Соколов С.В. «Аналитические модели пространственных траекторий для решения задач навигации», Прикладная математика и механика, т.79. вып.1, 2015, с. 24-30):
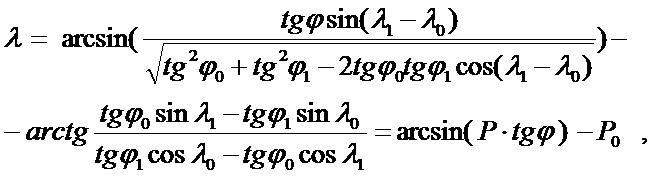 (1)
(1)
где ( ),(
),( ) - координаты соответственно начала и конца ортодромического отрезка, информация о которых содержится в блоке 5 памяти, P – выражение arcsin в скобках за исключением tg φ, а P0 – сокращенное обозначение вычитаемого arctg.
) - координаты соответственно начала и конца ортодромического отрезка, информация о которых содержится в блоке 5 памяти, P – выражение arcsin в скобках за исключением tg φ, а P0 – сокращенное обозначение вычитаемого arctg.
Во-вторых, известное навигационное уравнение изменения широты транспортного средства
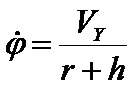 ,
,
где h –высота объекта над поверхностью Земли, r – радиус Земли,  - проекция скорости транспортного средства на ось ОY географической системы координат, с учетом известной связи модуля скорости и проекции скорости транспортного средства на ортодромии (см. вышеуказанную книгу С.В. Соколова на с. 24-30):
- проекция скорости транспортного средства на ось ОY географической системы координат, с учетом известной связи модуля скорости и проекции скорости транспортного средства на ортодромии (см. вышеуказанную книгу С.В. Соколова на с. 24-30):
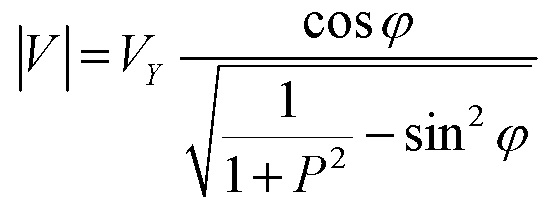 ,
,
может быть приведено к виду
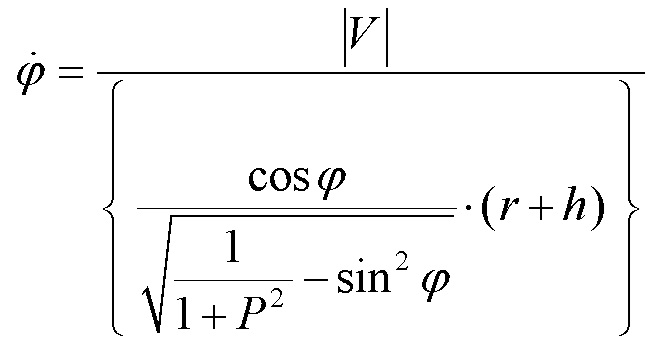 ,
,
легко интегрируемому разделением переменных:
 .
.
Из данного уравнения, в свою очередь, вытекает функциональная зависимость значения широты транспортного средства от модуля его скорости  :
:
 , (2)
, (2)
которая также положена в основу организации работы устройства.
Устройство позиционирования транспортных средств работает следующим образом.
До начала движения транспортного средства в блок 7 памяти записывается информация о возможных траекториях движения транспортного средства, разделенных на участки, аппроксимируемые с заданной точностью кратчайшими отрезками траекторий между точками разделения (ортодромическими отрезками).
Измеритель 1 трех ортогональных проекций скорости транспортного средства осуществляет измерение трех проекций Vx,Vy,Vz текущей скорости транспортного средства относительно Земли в системе координат, жестко связанной с транспортным средством.
Вычислитель 2 модуля скорости определяет текущие значения модуля скорости транспортного средства |V| за счет соответствующего преобразования выходных сигналов измерителя 1 проекций скорости  транспортного средства:
транспортного средства:
 .
.
Так как значение модуля скорости инвариантно выбору системы координат, то угловое вращение транспортного средства не влияет на процесс его измерения, что позволяет обойтись без датчиков угловой скорости и, тем самым, сократить состав измерительного комплекса по сравнению с традиционным.
Интегратор 3 определяет текущие значения интеграла модуля скорости транспортного средства |V|:  , которые с выхода интегратора поступают на вход микропроцессора 5, вычисляющего текущие значения широты транспортного средства в соответствии с формулой (2). Текущие значения широты транспортного средства с выхода микропроцессора 5 поступают в микропроцессор 6, вычисляющий текущие значения долготы транспортного средства в соответствии с формулой (1). Одновременно микропроцессор 5 осуществляет сравнение текущего значения широты со значением широты конца ортодромического отрезка, записанного в блоке 7 памяти, при их равенстве на дополнительном выходе микропроцессора 5 формируется сигнал, поступающий на управляющий вход блока 7 памяти, с которого микропроцессоры 5 и 6 считывают соответственно значения широты и долготы конца нового ортодромического отрезка для последующего вычисления в соответствии с формулами (1) и (2). Начальными значениями широты и долготы нового ортодромического отрезка, также необходимыми для последующего вычисления соотношений (1) и (2), являются значения широты и долготы конца предыдущего ортодромического отрезка. С выхода микропроцессора 5 текущие значения широты транспортного средства поступают на выход устройства, а на другой выход устройства текущие значения долготы транспортного средства поступают с выхода микропроцессора 6.
, которые с выхода интегратора поступают на вход микропроцессора 5, вычисляющего текущие значения широты транспортного средства в соответствии с формулой (2). Текущие значения широты транспортного средства с выхода микропроцессора 5 поступают в микропроцессор 6, вычисляющий текущие значения долготы транспортного средства в соответствии с формулой (1). Одновременно микропроцессор 5 осуществляет сравнение текущего значения широты со значением широты конца ортодромического отрезка, записанного в блоке 7 памяти, при их равенстве на дополнительном выходе микропроцессора 5 формируется сигнал, поступающий на управляющий вход блока 7 памяти, с которого микропроцессоры 5 и 6 считывают соответственно значения широты и долготы конца нового ортодромического отрезка для последующего вычисления в соответствии с формулами (1) и (2). Начальными значениями широты и долготы нового ортодромического отрезка, также необходимыми для последующего вычисления соотношений (1) и (2), являются значения широты и долготы конца предыдущего ортодромического отрезка. С выхода микропроцессора 5 текущие значения широты транспортного средства поступают на выход устройства, а на другой выход устройства текущие значения долготы транспортного средства поступают с выхода микропроцессора 6.
Предлагаемое устройство позиционирования транспортных средств позволяет существенно сократить состав аппаратных средств измерительного комплекса транспортного средства, в частности, за счет отказа от использования измерителей параметров вращения, и сократить объем навигационных вычислений, например, за счет исключения процедуры решения дифференциальных уравнений навигации и вращения объекта, а также повысить точность и надежность измерений при позиционировании транспортного средства в условиях отсутствия навигационных сигналов от внешних систем геопозиционирования.
Устройство позиционирования транспортных средств, содержащее измеритель трех ортогональных проекций скорости транспортного средства и вычислительный блок, отличающееся тем, что в него введены вычислитель модуля скорости, интегратор и блок памяти, в который записана картографическая информация о возможных траекториях движения транспортного средства, разделенных на участки ортодромическими отрезками, при этом выход измерителя трех ортогональных проекций скорости транспортного средства подключен к входу вычислителя модуля скорости, выход которого соединен с входом интегратора, а вычислительный блок выполнен в виде двух соединенных между собой микропроцессоров, подключенных к блоку памяти, вход первого микропроцессора соединен с выходом интегратора, а его дополнительный выход подключен к управляющему входу блока памяти, выходы микропроцессоров являются выходами устройства.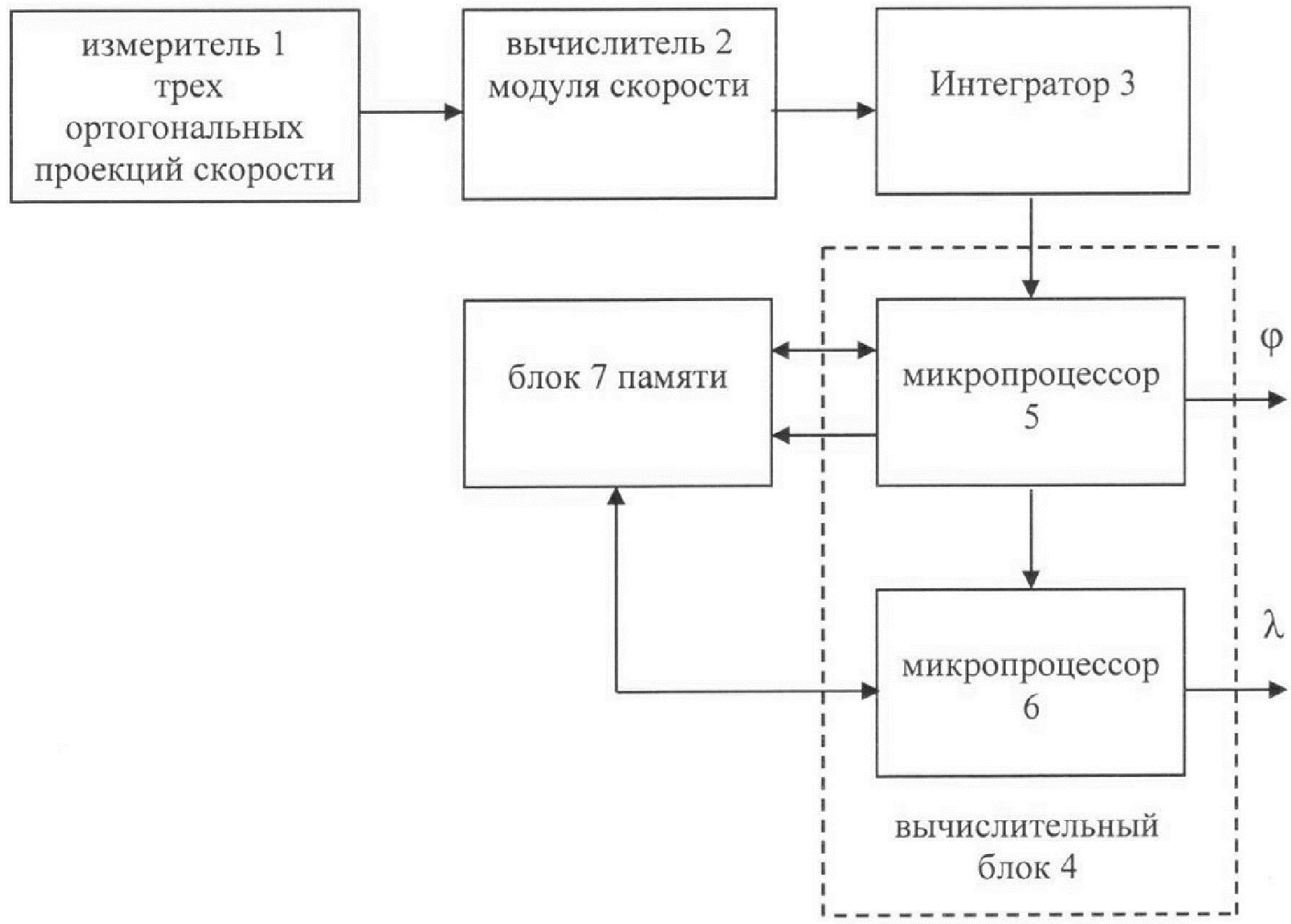
Устройство измерения линейной скорости транспортного средства
Адаптивный приемник сигналов автоматической локомотивной сигнализации
Система автоблокировки с тональными рельсовыми цепями
Способ мониторинга объектов инфраструктуры железнодорожной станции
Система ограждения места работ и оповещения работающих на железнодорожном пути о приближении подвижного состава
Гидравлический силомер
Способ дистанционного мониторинга позиционирования транспортных средств
Способ выбора созвездия навигационных спутников
Устройство для контроля вагонов
Способ обнаружения перегруженных вагонов с помощью вагонных электронных весов и устройство для его осуществления
Моделирующий стенд дефектов буксового узла колесной пары
Волоконно-оптический датчик давления
Система для управления движением поездов
Система комплексного диагностического контроля ходовых частей поездов
Крановые весы для взвешивания крупнотоннажных контейнеров

