Результат интеллектуальной деятельности: АСТРОВИЗИРУЮЩИЙ ПРИБОР
Вид РИД
Изобретение
Изобретение относится к области оптико-электронного приборостроения и может быть использовано в системах астроориентации, астрокоррекции и астронавигации летательных аппаратов.
Известен астровизирующий прибор с подвижным полем зрения (см. Федосеев В.И. и др. Оптико-электронные приборы ориентации и навигации космических аппаратов. Москва, Логос, 2007 г., стр. 142-150), содержащий входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, а так же внешнюю рамку подвеса и блок обработки информации, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота, выходы которых подключены соответственно ко второму и третьему входам блока обработки информации.
Недостатком данного устройства является большая продолжительность измерения углового положения заданной звезды, связанная с последовательным проведением операций, составляющих процесс измерения, включающий обработку информации с измерителей угла поворота и приемника излучения, формирование управляющего воздействия на приводы рамок подвеса, проведение конечных вычислений положения заданной звезды с учетом всей поступившей информации.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому эффекту является астровизирующий прибор (см. патент России №2540136, м. кл. G01C 21/02, опубл. 10.02.2015), выбранный в качестве прототипа, содержащий входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, а так же внешнюю рамку подвеса и блок обработки информации, первый вход которого подключен к выходу, а первый управляющий выход - к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки подвеса снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота. Блок обработки информации выполнен в виде многопроцессорного устройства управления, первый и второй многоканальные входы которого подключены соответственно к многоканальным выходам измерителей угла поворота. В состав вычислительной системы блока обработки информации входят три процессора. Первый процессор реализует обработку видеоданных, второй процессор, осуществляет измерение углового положения звезды, а третий - управление приводами подвеса, при этом второй процессор подключен между первым и третьим.
Процесс измерения углового положения заданной звезды запускается с управляющего устройства летательного аппарата. Команда, содержащая информацию об ожидаемом угловом положении заданной звезды, поступает в блок обработки информации. Через устройство интерфейса эта команда в виде двоичных кодов подается на второй процессор, который формирует и передает в третий процессор команду на определение разности между ожидаемым угловым положении заданной звезды и фактическим угловым положением оси визирования объектива. Третий процессор периодически, исходя из полученных результатов, рассчитывает по заданному закону регулирования управляющие воздействия, которые далее преобразуются в соответствующие напряжения на обмотках двигателей приводов. Информация о фактическом угловом положении оси визирования объектива, используемая в расчете, поступает в третий процессор с преобразователей угол-код измерителей угла поворота через соответствующее устройство интерфейса. В результате управляющего воздействия рамки подвеса поворачиваются, устанавливая объектив в требуемое угловое положение. В этом положении он удерживается с необходимой точностью, компенсируя все внешние возмущения, в течение всего времени, необходимого для измерения углового положения заданной звезды. Одновременно изображение участка звездного неба, формируемого объективом, преобразуется в приемнике излучения в последовательный цифровой поток видеоданных и направляется в первый процессор на обработку через устройство интерфейса. Первый процессор анализирует изображение заданной звезды, определяет положение его центра на матрице приемника и направляет полученные результаты во второй процессор. Второй процессор, учитывая положение центра изображения звезды и угловое положении оси визирования объектива, проводит расчет углового положения заданной звезды относительно базы астровизирующего прибора и выдает его через устройство интерфейса в управляющее устройство навигационной системы летательного аппарата для корректировки курса или положения. Информация об угловом положении оси визирования объектива поступает во второй процессор через устройство интерфейса с преобразователей угол-код измерителей угла поворота.
Недостатком рассматриваемого астровизирующего прибора является низкая скорость измерения положения заданной звезды относительно базы, ограниченная скоростью проведения операций по выделению изображения заданной звезды и определению положения его центра на матрице приемника излучения.
В ходе определения положения заданной звезды относительно базы астровизирующего прибора в блоке обработки информации вычислительная система на базе трех процессоров параллельно осуществляет следующие основные операции:
- управление приводами внутренней и внешней рамок подвеса;
- расчет углового положения оси визирования объектива по данным с преобразователей угол-код измерителей угла поворота;
- выделение изображения заданной звезды и определение положения его центра на матрице приемника излучения.
Длительность последней операции значительно больше двух предыдущих, что связано с необходимостью последовательной обработки процессором большого объема видеоданных с приемника излучения, представляющего собой матрицу фоточувствительных элементов. Поэтому длительность данной операции в основном и определяет быстродействие астровизирующего прибора в целом. При увеличении угловых скоростей эволюции летательных аппаратов или усложнении алгоритмов обработки видеоданных вычислительной способности одного процессора может оказаться недостаточно для обеспечения необходимого быстродействия астровизирующего прибора.
Кроме того, при работе в составе блока обработки информации вычислительной системы на базе трех высокопроизводительных процессоров потребляется значительная электрическая энергия, что приводит к необходимости использования источников питания повышенной мощности и введения дополнительных конструктивных элементов для обеспечения отвода выделяемого тепла. В конечном итоге ухудшаются весогабаритные характеристики прибора, являющиеся одними из основных для оборудования летательных аппаратов.
Целью заявляемого изобретения является повышение скорости измерения углового положения заданной звезды, при снижении энергопотребления, массы и габаритных размеров астровизирующего прибора.
Указанная цель достигается тем, что в астровизирующем приборе, содержащем входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, а так же внешнюю рамку подвеса и блок обработки информации, первый управляющий выход которого подключен к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота, выходы которых подключены соответственно ко второму и третьему входу блока обработки информации, при этом четвертый выход блока обработки информации является выходом астровизирующего прибора, а первый управляющий вход блока обработки информации является входом астровизирующего прибора, блок обработки информации выполнен в виде программно-аппаратного устройства управления и содержит узел аппаратной обработки, первый управляющий вход, второй и третий входы которого являются соответственно первым управляющим, вторым и третьим входами устройства обработки информации, N-канальный видеовход которого является N-канальным видеовходом узла аппаратной обработки и подключен к N-канальному видеовыходу приемника излучения, при N>1, первый, второй, третий управляющие и четвертый выходы узла аппаратной обработки являются соответственно первым, вторым, третьим управляющими и четвертым входами блока обработки информации, а также узел программной обработки, подключенный портом ввода-вывода к узлу аппаратной обработки.
На фиг. 1 показана функциональная схема астровизирующего прибора.
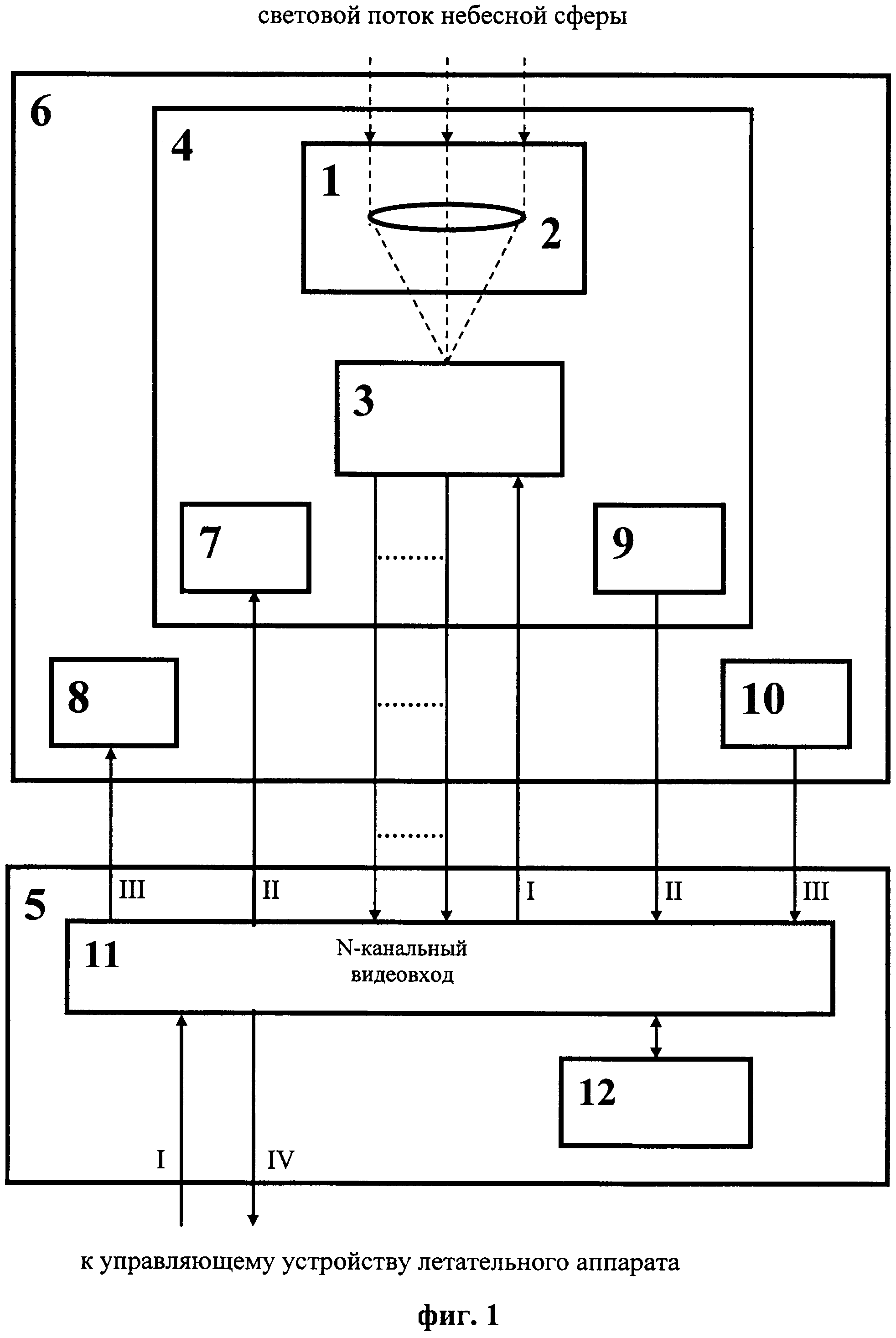
На фиг. 2 показана функциональная схема блока обработки информации.
Астровизирующий прибор содержит входную оптическую систему 1 с объективом 2, в фокальной плоскости которого установлен приемник излучения 3, размещенные на внутренней рамке подвеса 4, а так же внешнюю рамку подвеса 6 и блок обработки информации 5, первый управляющий выход которого подключен к управляющему входу приемника излучения 3, при этом внутренняя 4 и внешняя 6 рамки снабжены приводами 7 и 8, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации 5, и измерителями угла поворота 9 и 10, выходы которых подключены соответственно ко второму и третьему входу блока обработки информации 5, при этом четвертый выход блока обработки информации 5 является выходом астровизирующего прибора, а первый управляющий вход блока обработки информации 5 является входом астровизирующего прибора. Блок обработки информации 5 выполнен в виде программно-аппаратного устройства управления и содержит узел аппаратной обработки 11, первый управляющий вход, второй и третий входы которого являются соответственно первым управляющим, вторым и третьим входами устройства обработки информации 5, N-канальный видеовход которого является N-канальным видеовходом узла аппаратной обработки 11 и подключен к N-канальному видеовыходу приемника излучения 3, при этом N>1, первый, второй, третий управляющие и четвертый выходы узла аппаратной обработки 11 являются соответственно первым, вторым, третьим управляющими и четвертым входами блока обработки информации 5, а также узел программной обработки 12, подключенный портом ввода-вывода к узлу аппаратной обработки 11.
Состав и внутренние связи узла аппаратной обработки 11 могут изменяться в зависимости от конкретного варианта выполнения астровизирующего прибора. В рассматриваемом варианте в состав узла аппаратной обработки 11 входят вычислительные устройства 131-13N, 14, 15, 16, 17 и устройство интерфейса 18.
Приемник излучения 3 представляет собой матрицу фоточувствительных элементов формата 2048×2048 с устройствами считывания и аналого-цифрового преобразования и имеет 16 цифровых выходных видеоканалов. Измерители угла поворота 9 и 10 реализованы на базе высокоточной оптической энкодерной системы. Приводами 7 и 8 внутренней 4 и внешней 6 рамок подвеса являются бесконтактные моментные электродвигатели. Узел аппаратной обработки 11 может быть выполнен на программируемой логической интегральной схеме (ПЛИС) с низкой потребляемой мощностью, изготовленной по технологии field-programmable gate array (FPGA). Узел программной обработки 12 может быть выполнен на дискретном типовом цифровом сигнальном процессоре - digital signal processor (DSP) или аппаратно реализован в ПЛИС. Вычислительные устройства 131-13N, 14, 15, 16, 17 и устройство интерфейса 18 представляют собой электрические схемы, выполненные на основе простых арифметических цифровых элементов: сумматоров, умножителей, счетчиков, компараторов, мультиплексоров, а также элементов памяти: регистров, оперативных запоминающих устройств (ОЗУ) и элементов памяти «first in, first out» (FIFO). В качестве элементов электрических схем могут использоваться как дискретные микросхемы, так и внутренние конфигурируемые элементы ПЛИС, имеющие энергопотребление значительно ниже, чем у высокопроизводительных процессоров, и не требующие введения конструктивных элементов для отвода выделяемого тепла.
Основной задачей, выполняемой астровизирующим прибором совместно с управляющим устройством летательного аппарата в составе навигационной системы, является определение углового положения заданной звезды относительно базы астровизирующего прибора. Для ее реализации в предлагаемом варианте выполнения астровизирующего прибора по командам с управляющего устройства летательного аппарата (на фиг. 1 не показано) необходимо выполнить два операции, составляющие цикл измерения. Первая операция - направить объектив 2 на заданную звезду, выбранную в качестве астроориентира, вторая - одновременно с первой, выдать в управляющее устройство информацию о фактическом угловом положении оси визирования объектива 2 и положении центра изображения заданной звезды в системе координат матрицы приемника излучения 3. Происходят эти операции следующим образом.
Управляющее устройство летательного аппарата периодически, через небольшие промежутки времени подает команды, задавая последовательность выполнения операций цикла измерения, и осуществляет обмен данными с внутренними устройствами астровизирующего прибора. Обмен данными происходит через устройство интерфейса 18 узла аппаратной обработки 11.
Во время первой операции управляющее устройство летательного аппарата принимает данные о фактическом угловом положении оси визирования объектива 2. Данные поступают с преобразователей угол-код измерителей угла поворота 9 и 10, размещенных соответственно на внутренней 4 и внешней 6 рамках подвеса. Учитывая полученные данные, а также данные навигационной системы о текущем положении летательного аппарата и ожидаемом угловом положении заданной звезды, управляющее устройство летательного аппарата рассчитывает управляющее воздействие на приводы 7 и 8 внутренней 4 и внешней 6 рамок подвеса. Управляющее воздействие в виде двоичных кодов поступает на входы вычислительных устройств 16 и 17, преобразующих по определенному закону полученные данные в напряжения на обмотках двигателей приводов 7 и 8. В результате внутренняя 4 и внешняя 6 рамки подвеса приходят в движение, и ось визирования объектива 2 выводится в направление заданной звезды и удерживается в требуемом положении во время проведения измерений.
Одновременно производится вторая операция. Оптическая система 1 с объективом 2 формирует на матрице фоточувствительных элементов приемника излучения 3 изображение участка небесной сферы, включая заданную звезду. Приемник излучения 3 преобразует полученное изображение в последовательную цифровую выборку видеоданных и через N-канальный видеовыход выдает ее через N-канальный видеовход блока обработки информации 5 в узел аппаратной обработки 11. С целью повышения скорости обработки видеоданных, в узле аппаратной обработки 11 установлены вычислительные устройства 131-13N, число которых равно числу видеовыходов приемника излучения 3, при этом цифровая выборка с каждого видеовыхода поступает на соответствующее вычислительное устройство. Каждое из вычислительных устройств 131-13N параллельно, по заданному алгоритму осуществляет обработку своей части видеоданных, соответствующих определенному участку изображения. Алгоритм обработки видеоданных по определению положения центра изображения заданной звезды в системе координат матрицы приемника излучения 3 представляет собой последовательность простейших арифметических операций. Полученные данные поступают на вычислительное устройство 14, которое объединяет промежуточные результаты вычислений, выдавая конечный результат положения центра изображения заданной звезды. Узел программной обработки 12 анализирует достоверность полученного результата и при необходимости корректирует закон вычисления. В случае получения достоверного результата вычислений управляющее устройство летательного аппарата считывает данные о положении центра изображения заданной звезды в системе координат матрицы приемника излучения 3 и данные о фактическом угловом положении оси визирования объектива 2. Учитывая полученные данные, управляющее устройство корректирует управляющее воздействие на приводы 7 и 8 внутренней 4 и внешней 6 рамок подвеса. После отработки управляющего воздействия и стабилизации положения оси визирования объектива 2 управляющее устройство летательного аппарата повторно считывает данные о положении центра изображения заданной звезды и данные о фактическом угловом положении оси визирования объектива 2. В результате, управляющее устройство рассчитывает положение заданной звезды относительно базы астровизирующего прибора, которое далее используется для корректировки курса или положения летательного аппарата. При необходимости цикл измерения повторяется.
При определении положения центра изображения заданной звезды вычислительное устройство 15 предоставляет необходимые данные для работы узла программной обработки 12 и через первый управляющий выход блока обработки информации 5 устанавливает оптимальный режим работы приемника излучения 3. Информационный обмен внутри блока обработки информации 5 между вычислительными устройствами узла аппаратной обработки 11 и узлом программной обработки 12 осуществляется через устройство интерфейса 18.
Изложенный вариант выполнения является оптимальным с точки зрения гибкости алгоритмов управления астровизирующим прибором в составе навигационной системы летательного аппарата и снижения скорости измерения углового положения заданной звезды. Возможна реализация варианта выполнения астровизирующего прибора, который функционально будет соответствовать выбранному прототипу. Расчет управляющего воздействия на приводы 7 и 8 внутренней 4 и внешней 6 рамок подвеса, в таком случае, осуществляется вычислительными устройствами 16 и 17, учитывая данные об ожидаемом угловом положении заданной звезды, выданные управляющим устройством летательного аппарата. Кроме того, в расчете используются данные о фактическом угловом положении оси визирования объектива 2, считанные с преобразователей угол-код измерителей угла поворота 9 и 10. Окончательный расчет углового положения заданной звезды относительно базы астровизирующего прибора производится вычислительным устройством 14 по данным о положении центра изображения заданной звезды в системе координат матрицы приемника излучения 3. При этом учитывается текущая информация с преобразователей угол-код измерителей угла поворота 9 и 10, полученная после стабилизации положения оси визирования объектива 2.
В любом из рассмотренных вариантов, в силу указанных выше причин, длительность цикла измерения углового положения заданной звезды относительно базы астровизирующего прибора в большей степени зависит от скорости определения положении центра изображения заданной звезды. В свою очередь, скорость определения положения центра изображения увеличивается пропорционально количеству задействованных каналов обработки видеоданных N.
Время, которое в прототипе используется первым процессором на последовательную обработку видеоданных при определении положения центра изображения, в заявляемом приборе уменьшается в несколько раз за счет параллельной обработки видеоданных в блоке обработки информации, в зависимости от количества задействованных каналов. Кроме того, в прототипе блок обработки информации построен на базе трех высокопроизводительных процессоров, а в заявляемом приборе применяется только один, в результате чего снижается энергопотребление, и как следствие, масса и габаритные размеры астровизирующего прибора.
Таким образом, в результате того, что блок обработки информации выполнен в виде программно-аппаратного устройства управления с использованием ПЛИС, в котором реализована многоканальная параллельная обработка видеоданных, достигается повышение скорости измерения положения заданной звезды, при снижении энергопотребления, массы и габаритных размеров астровизирующего прибора.
Астровизирующий прибор, содержащий входную оптическую систему с объективом, в фокальной плоскости которого установлен приемник излучения, размещенные на внутренней рамке подвеса, а также внешнюю рамку подвеса и блок обработки информации, первый управляющий выход которого подключен к управляющему входу приемника излучения, при этом внутренняя и внешняя рамки снабжены приводами, входы которых подключены соответственно ко второму и третьему управляющим выходам блока обработки информации, и измерителями угла поворота, выходы которых подключены соответственно ко второму и третьему входам блока обработки информации, при этом четвертый выход блока обработки информации является выходом астровизирующего прибора, а первый управляющий вход блока обработки информации является входом астровизирующего прибора, отличающийся тем, что блок обработки информации выполнен в виде программно-аппаратного устройства управления и содержит узел аппаратной обработки, первый управляющий вход, второй и третий входы которого являются соответственно первым управляющим, вторым и третьим входами устройства обработки информации, N-канальный видеовход которого является N-канальным видеовходом узла аппаратной обработки и подключен к N-канальному видеовыходу приемника излучения, при этом N>1, первый, второй, третий управляющие и четвертый выходы узла аппаратной обработки являются соответственно первым, вторым, третьим управляющими и четвертым входами блока обработки информации, а также узел программной обработки, подключенный портом ввода-вывода к узлу аппаратной обработки.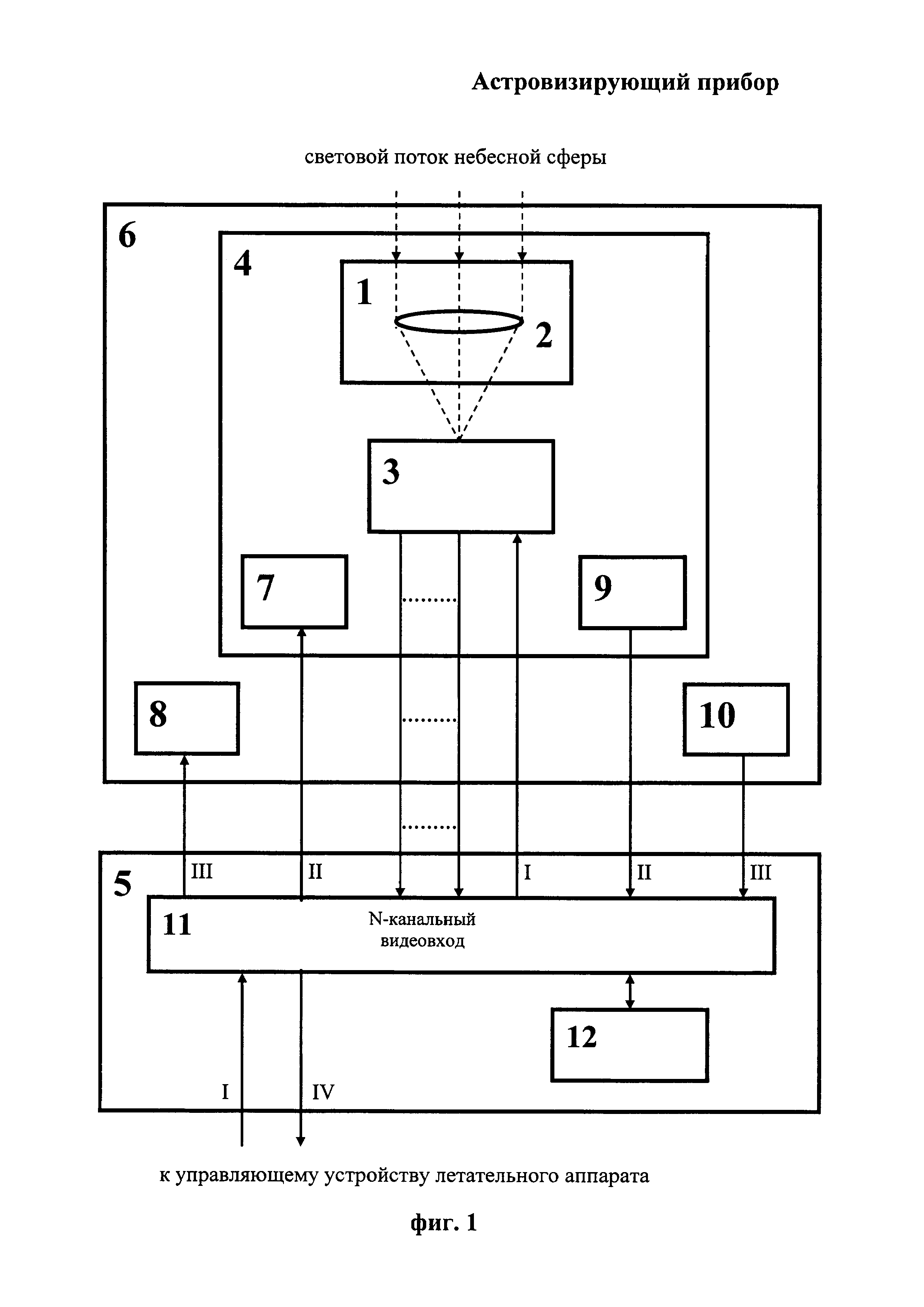
Демультиплексор со спектральным разделением каналов
Способ склеивания инертных полимерных материалов с металлическими поверхностями
Двухканальная зеркально-линзовая система
Стенд измерения параметров тепловизионных каналов
Делительная машина маятникового типа для формирования штриховых структур на выпуклых цилиндрических поверхностях
Делительная машина маятникового типа для изготовления штриховых структур на неплоских рабочих поверхностях
Делительная машина маятникового типа для изготовления штриховых структур на выпуклых цилиндрических поверхностях
Демультиплексор со спектральным разделением каналов
Стенд измерения параметров тепловизионных каналов
Делительная машина маятникового типа для изготовления штриховых структур на неплоских рабочих поверхностях
Инфракрасный зеркально-линзовый объектив
Оптическая система тепловизионного прибора с двумя полями зрения
Устройство формирования изображения
Оптическая система тепловизионного прибора
Оптическая система тепловизионного прибора с двумя полями зрения
Теплопеленгатор
Устройство контроля и управления тепловизионными каналами
Оптическая система тепловизионного прибора с двумя полями зрения
Оптическая система тепловизионного прибора
Многоканальная оптико-локационная система

