Результат интеллектуальной деятельности: Наземный автоматизированный комплекс управления космическими аппаратами на базе нейросетевых технологий и элементов искусственного интеллекта с использованием базы знаний на основе технологии блокчейн и способ управления его реконфигурацией
Вид РИД
Изобретение
Группа изобретений относится к средствам наблюдения или слежения за космическим аппаратом с использованием моделей обучаемых нейронных сетей, а именно к управлению реконфигурацией наземного автоматизированного комплекса управления космическими аппаратами (НАКУ КА) на базе нейросетевых технологий и элементов искусственного интеллекта с использованием базы знаний на основе технологии блокчейн.
Из уровня техники известны нейросетевые технологии, применяемые в ракетно-космической промышленности, например способ интеллектуальной интерпретации данных спутниковой телеметрии, основанный на нейронной сети (см. CN 10 5 320 987, опубл. 10.02.2016). Способ включает автономный модуль обучения и онлайн-модуль интерпретации в режиме реального времени. Автономный модуль обучения выполняет автономное обучение, основанное на выборке данных телеметрии в базе данных телеметрии, и получают новый образец данных телеметрии для формирования модели нейронной сети для интерпретации данных телеметрии. Модуль онлайн-интерпретации в режиме реального времени выполняет онлайн-интерпретацию в реальном времени данных телеметрии в соответствии с моделью нейронной сети, полученной автономным обучающим модулем. Образец данных телеметрии в базе данных телеметрии используется для обучения и установления модели алгоритма. Новый полученный образец данных телеметрии используется для выполнения повторного обучения в процессе интерпретации данных телеметрии. Во всём интеллектуальном процессе интерпретации данных телеметрии достоверность модели нейронной сети для интерпретации данных телеметрии постепенно увеличивается с увеличением времени и увеличением объемов данных телеметрии.
Недостатком указанного способа является то, что он неприменим для незапланированной, быстрой и безопасной реконфигурации наземного автоматизированного комплекса управления космическим аппаратом.
Из уровня техники также известны способ и система планирования многоспутниковых задач (CN 10 6 951 312, опубл. 14.07.2017), выбранные в качестве наиболее близкого аналога заявленной группы изобретений. Способ содержит этапы получения начального заданного количества последовательностей задач и выбора последовательности задач с максимальной степенью адаптации от начального заданного количества последовательностей задач в качестве начальной целевой последовательности задач. Выполняют операции согласно начальной целевой последовательности задач посредством квантово-генетического алгоритма для получения нового заданного количества последовательностей задач; и выбора новой целевой последовательности задач из нового заданного количества последовательностей задач и выполнения итеративной операции в соответствии с новой целевой задачей посредством квантово-генетического алгоритма для получения запланированной последовательности задач.
Недостатком наиболее близкого аналога является то, что он предназначен для получения статического плана орбитальной группировки и в нём применяется вероятностный алгоритм оптимизации, следовательно данный метод также неприменим для незапланированной, быстрой и безопасной реконфигурации НАКУ КА.
Технический результат заявленной группы изобретения заключается в формировании интегрированной многофункциональной наземно-космической структуры с единым информационным пространством с динамическим контуром управления и проведения измерений. Процесс функционирования НАКУ КА будет заключаться в формировании близко к реальному масштабу времени динамических контуров таких, что управляемость и наблюдаемость средств НАКУ КА станет определяющим свойством. Техническим результатом также является создание распределённой, реплицируемой, криптозащищенной базы знаний нейрокомплекса управления реконфигурацией НАКУ КА на основе технологии блокчейн.
Технический результат достигается посредством создания группы изобретений: НАКУ КА на базе нейросетевых технологий и элементов искусственного интеллекта с использованием базы знаний на основе технологии блокчейн и способ управления его реконфигурацией.
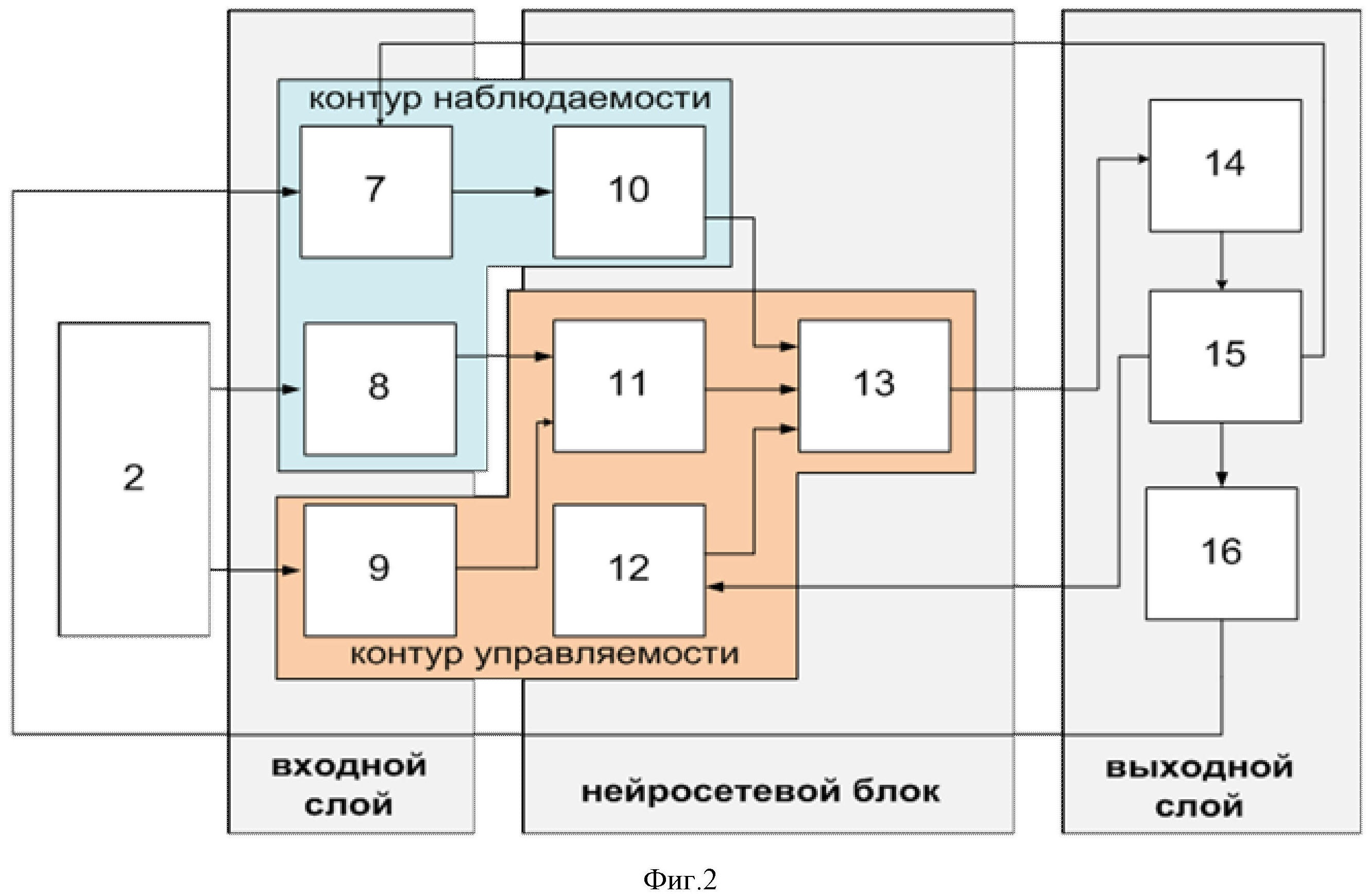
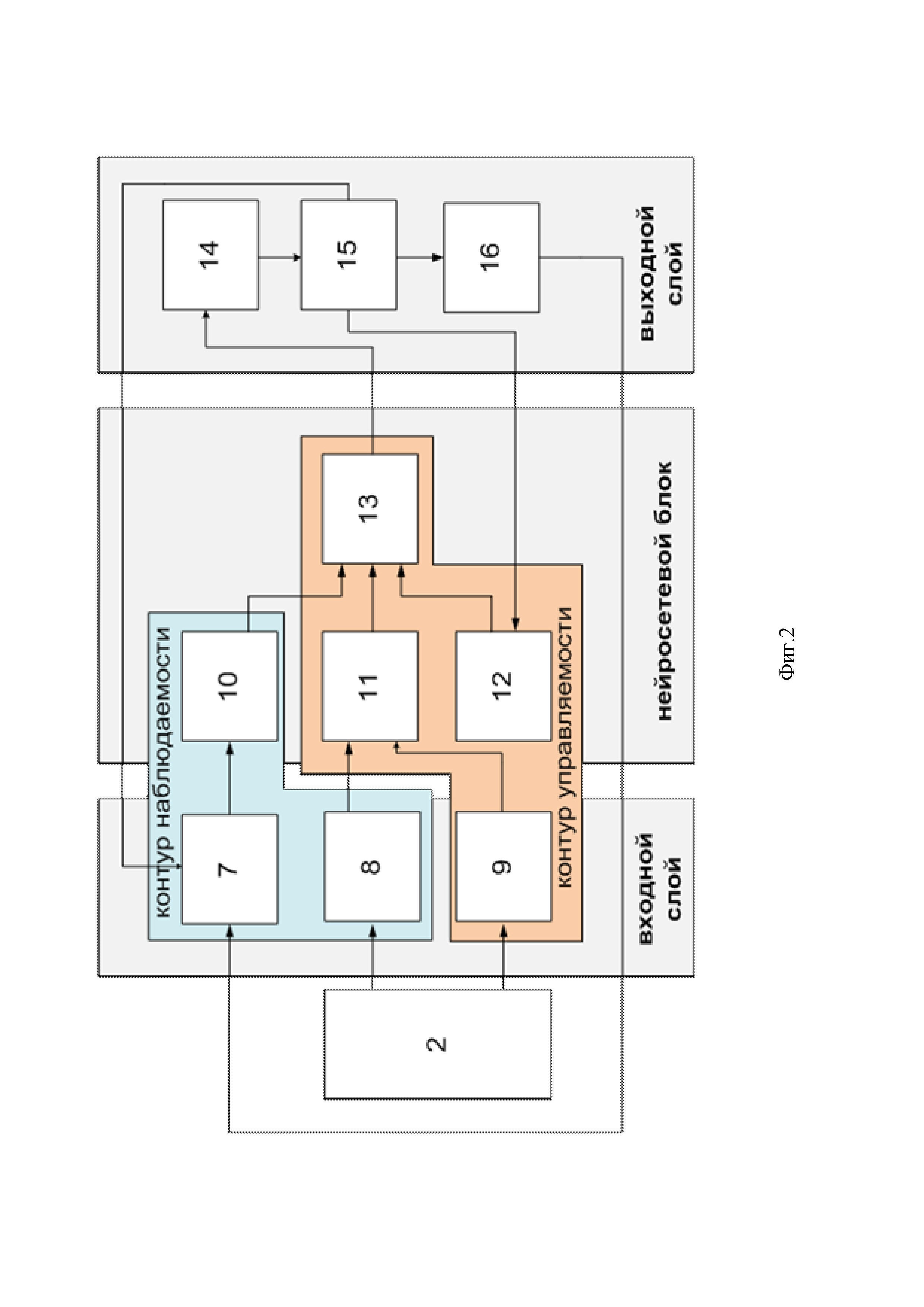
НАКУ КА на базе нейросетевых технологий и элементов искусственного интеллекта с использованием базы знаний на основе технологии блокчейн состоит из входного слоя, нейросетевого блока, и выходного слоя. Во входном слое размещены комплекс мониторинга технического состояния, комплекс оценки текущей обстановки, комплекс анализа задач по управлению космическими аппаратами и измерениями. В нейросетевом блоке размещены нейронная сеть технических средств НАКУ КА и измерений, нейронная сеть определения синаптических весов и связей, нейронная сеть анализа бесконфликтности и нейронная сеть подбора средств НАКУ КА и измерений. Выходной слой содержит комплекс реализации конфигурации НАКУ КА и измерений, текущую конфигурацию и новую конфигурацию НАКУ КА и измерений. Комплекс мониторинга технического состояния, нейронная сеть технических средств НАКУ КА и измерений и комплекс оценки текущей обстановки объединены контуром наблюдаемости. Нейронная сеть определения синаптических весов и связей, нейронная сеть подбора средств НАКУ КА и измерений, комплекс анализа задач по управлению КА и измерений, нейронная сеть анализа бесконфликтности объединены контуром управляемости.
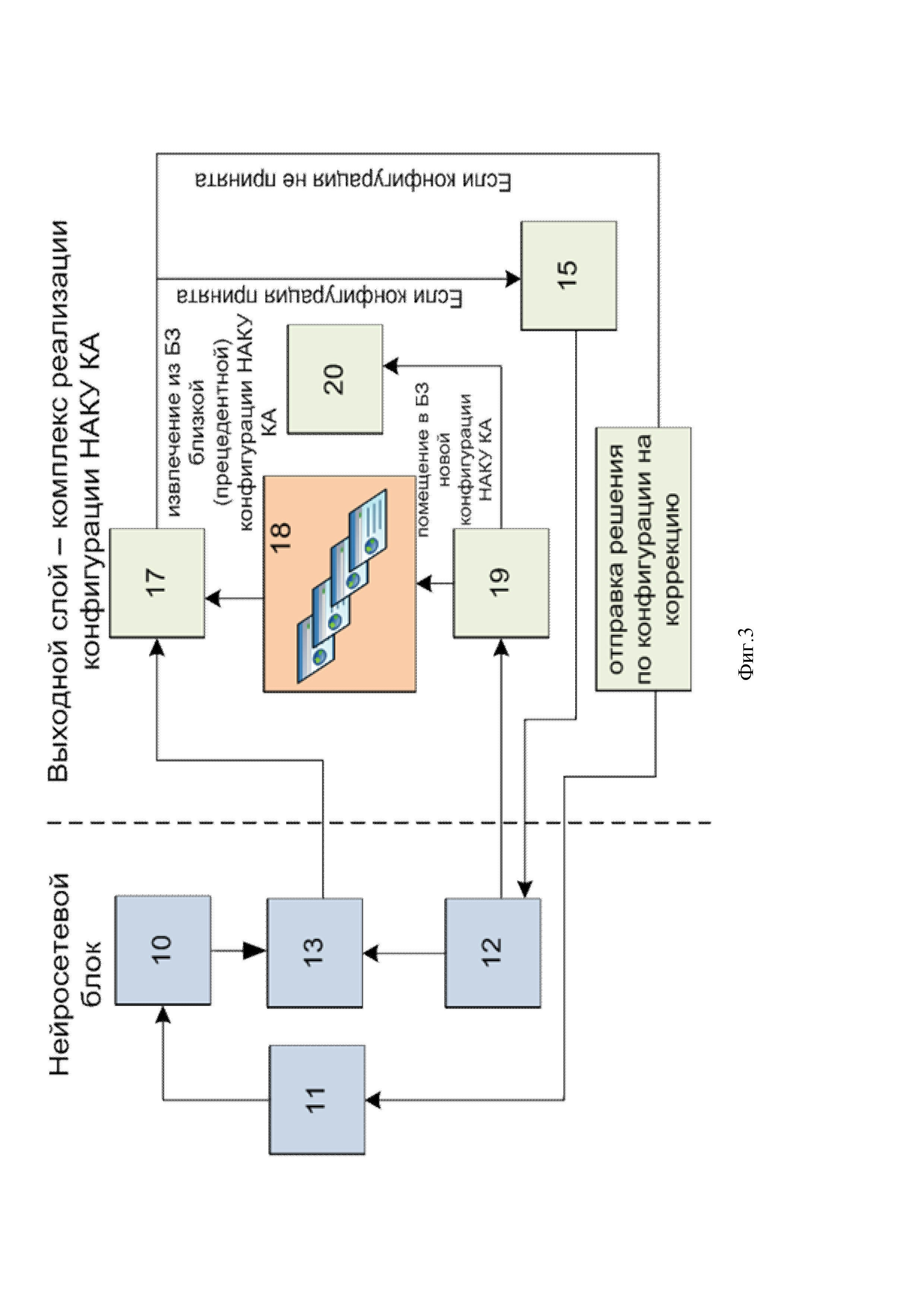
Комплекс мониторинга технического состояния соединён с нейронной сетью технических средств НАКУ КА и измерений. Комплекс оценки текущей обстановки соединен с нейронной сетью определения синаптических весов и связей. Комплекс анализа задач по управлению космическими аппаратами и измерениям связан с нейронной сетью определения синаптических весов и связей. Нейронная сеть технических средств НАКУ И КА и измерений, нейронная сеть определения синаптических весов и связей и нейронная сеть анализа бесконфликтности связаны с нейронной сетью подбора средств НАКУ КА и измерений, которая связана с комплексом конфигурации НАКУ КА и измерений, образующим новую конфигурацию НАКУ КА и измерений. Новая конфигурация НАКУ КА и измерений занимает положение текущей конфигурации НАКУ КА и измерений, связанной с комплексом мониторинга технического состояния, с которым также связан блок новой конфигурации НАКУ КА. Нейросетевой модуль обучения включает нейросетвой блок и выходной слой – комплекс реализации конфигурации НАКУ КА. Выходной слой модуля обучения содержит распределённую базу знаний, с которой связан модуль введения в действие новой конфигурации НАКУ КА, который связан с нейронной сетью анализа бесконфликтности. Распределённая база знаний связана с модулем сопоставления и принятия эффективных решений. Модуль сопоставления и принятия эффективных решений связан с нейронной сетью подбора средств НАКУ КА и измерений, связанной с нейронной сетью технических средств НАКУ КА и измерений. Нейронная сеть технических средств НАКУ КА и измерений связана с нейронной сетью определения синаптических весов. Модуль введения в действие новой конфигурации НАКУ КА связан с модулем отображения на средствах коллективного пользования.
На первом этапе осуществления способа управления реконфигурацией НАКУ КА на базе нейросетевых технологий и элементов искусственного интеллекта с использованием базы знаний на основе технологии блокчейн формируют входные данные НАКУ КА. Сформированную и формализованную информацию передают в нейросетевой компонент комплекса, который состоит из четырёх взаимоувязанных нейронных сетей: технических средств НАКУ КА и измерений, синаптических весов и связей, анализа бесконфликтности, подбора средств НАКУ КА и измерений. Данные полученные в результате работы трёх первых вышеуказанных сетей передаются в нейросеть подбора средств, где происходит принятие решения и в формализованном виде передаются в комплекс реализации конфигурации НАКУ КА и измерений. Комплекс реализации конфигурации является исполнительным органом выходного слоя нейрокомплекса и непосредственно осуществляет управляющее воздействие на конфигурацию технических средств НАКУ КА. В процессе реконфигурации используют модель обучения, основанную на коррекции ошибки, при которой модуль сопоставления и принятия эффективных решений нейрокомплекса извлекает прецедент из базы знаний, которая содержит в себе информацию обо всех реализованных конфигурациях НАКУ КА и распределена по всем объектам НАКУ КА, и проводит сравнение с подобранной конфигурацией.
Результатом сравнения становится принятие или отклонение новой конфигурации. Критерием принятия служит сравнение коэффициентов наблюдаемости и управляемости новой конфигурации, с эффективной прецедентной конфигурацией НАКУ КА извлеченной из базы знаний. Конфигурация отправляется на коррекцию в нейросетевой блок, повторяются все операции по построению новой конфигурации, но уже с другими показателями синаптических весов. Далее проводится коррекция синаптических весов и сразу запускается следующая итерация и так до тех пор, пока энергия сигнала ошибки, то есть среднеквадратичные отклонения показателей наблюдаемости и управляемости не достигнут оптимального значения, новая конфигурация НАКУ КА принимается. После принятия новая конфигурация НАКУ КА проверяется на бесконфликтность комплексом анализа бесконфликтности. После проверки на бесконфликтность новая конфигурация НАКУ КА отправляется на комплекс введения в действие. После подтверждения оператором введения в действие новой конфигурации НАКУ КА она помещается в базу знаний нейрокомплекса. Базу знаний реализуют в виде распределённой реплицируемой базы данных посредством технологии блокчейн.
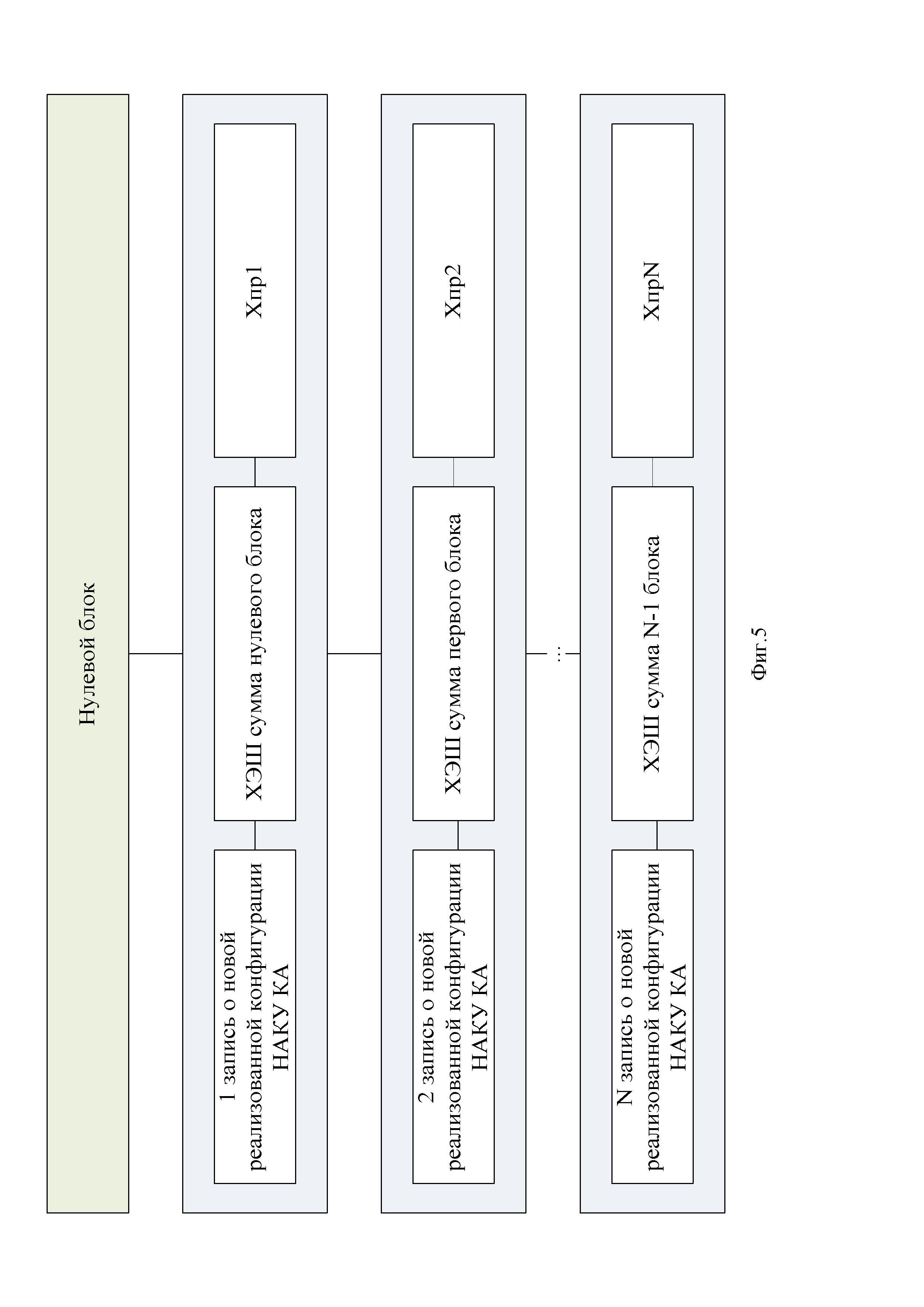
Технология блокчейн реализуется следующим образом. Вначале формируется нулевой блок, который содержит состав технических средств НАКУ КА и/или служебную справочная информация и/или тренировочную конфигурацию НАКУ КА. Далее, когда возникает необходимость записать в базу знаний новую реализованную конфигурацию НАКУ КА, добавляется новый блок, который состоит из формализованных данных о новой конфигурации, а также записи хэш-суммы предыдущего, то есть нулевого блока. Далее цепочка продолжается, каждый раз добавляя к новой записи хеш-сумму предыдущего блока и образуя таким образом цепочку взаимоувязанных хэш-блоков.
Заявленная группа изобретений проиллюстрирована следующими схемами:
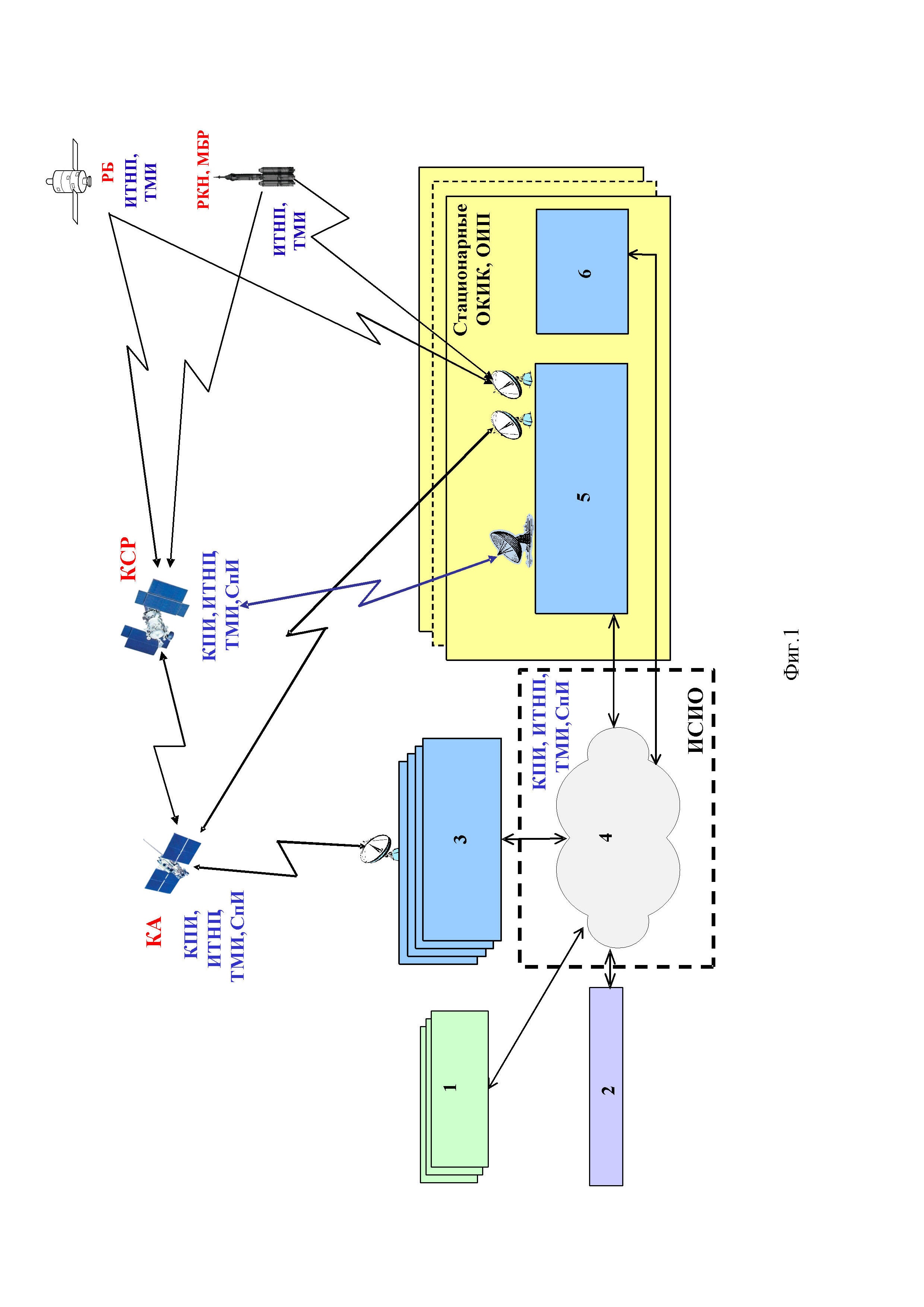
Фиг. 1 – структурная схема НАКУ КА;
Фиг. 2 – нейросетевая структура комплекса управление реконфигурацией НАКУ КА и измерений;
Фиг. 3 – схема нейросетевого модуля обучения;
Фиг. 4 – нейросетевой комплекс в виде графов;
Фиг. 5 – структура информации в блокчейн сети для БЗ.
На фиг.1-5 позиции обозначают следующее:
1- средства наземного комплекса управления ГЛОНАСС;
2- центр управления полетом;
3- перебазируемые наземные контрольно-измерительные системы;
4- системы связи и передачи данных;
5- командно-измерительная система;
6- командный пункт отдельных командно-измерительных комплексов;
7- комплекс мониторинга технического состояния;
8- комплекс оценки текущей обстановки;
9- комплекс анализа задач по управлению КА и измерений;
10- нейронная сеть технических средств НАКУ КА и измерений;
11- нейронная сеть определения синаптических весов и связей;
12- нейронная сеть анализа бесконфликтности;
13- нейронная сеть подбора средств НАКУ КА и измерений;
14- комплекс реализации конфигурации НАКУ КА и измерений;
15- новая конфигурация НАКУ КА и измерений;
16- текущая конфигурация НАКУ КА и измерений;
17- модуль сопоставления и принятия эффективных решений;
18- база знаний;
19- модуль введения в действие новой конфигурации НАКУ КА;
20- модуль отображения на средствах коллективного пользования.
НАКУ КА состоит из рассредоточенных по территории страны отдельных командно-измерительных комплексов (ОКИК) и отдельных измерительных пунктов (ОИП), оснащённых командно-измерительными и телеметрическими средствами, аппаратурой связи и передачи данных, органами управления наземными средствами. Из состава средств НАКУ КА формируются наземные комплексы управления космическими аппаратами (НКУ КА), комплекс средств измерений, сбора и обработки (КСИСО) и наземный измерительный комплекс (НИК) для разгонных блоков. То есть, НАКУ КА является интегрированной структурой, призванной обеспечить формирование единого информационно-коммуникационного пространства, на котором реализуются процессы управления космическими аппаратами и проведения телеизмерений пусков изделий ракетно-космический техники (РКТ). Управление космическими аппаратами осуществляется в соответствии с технологическими циклами управления, определяющими последовательность, порядок и временные интервалы выполнения операций управления космическими аппаратами. Следовательно, НАКУ КА должно иметь архитектуру, позволяющую формировать НКУ КА различных типов, и обеспечить реализацию их технологических циклов управления. В свою очередь, осуществимость технологического цикла управления в значительной степени определяется возможностями ЦУП установить взаимодействие с техническими объектами, входящими НКУ КА. Повышение такой возможности является одной из целей развития НАКУ КА.
В результате, актуальным становится анализ процесса функционирования НАКУ КА, как процесса динамического формирования работоспособной конфигурации средств управления космическими аппаратами (НКУ) и средств измерений (КСИСО и НИК) путём проведения планомерной направленной реконфигурации. Для каждой конфигурации НКУ, КСИСО и НИК обеспечивается свой набор центров управления полетами (ЦУП), командно-измерительных систем (КИС), линий передачи данных (спутниковая, радиорелейная, наземная оптоволоконная и т.п.) и средств телеметрического обеспечения. Управляемость и наблюдаемость средств НАКУ КА станет определяющим свойством, что потребует расширения возможностей управления реконфигурацией средствами НАКУ КА и измерений.
Задача повышения наблюдаемости НАКУ КА представляет собой определение начального состояния системы, а именно:
- состояния технических средств НАКУ КА (техническое обслуживание, исправность, задействование средства в данный момент);
- наличия нужного количества должностных лиц для выполнения задач применения технических средств НАКУ КА;
- состояния систем передачи данных (загруженность линий связи, техническое обслуживание, исправность, задействование средства в данный момент).
Решение задачи повышения управляемости НАКУ КА заключается в увеличении возможностей перевода НАКУ КА из одного работоспособного состояние в другое. Если НАКУ КА максимально наблюдаем и управляем, то можно получит такое допустимое управление, которое позволит провести направленные реконфигурации.
Применение разрабатываемого нейросетевого комплекса позволит внести ряд улучшений в методику управления направленной реконфигурацией НАКУ КА. Главным его отличием от алгоритмов обычного программного обеспечения является то, что поставленная задача будет решаться не путем прямого программирования, а путем самообучения нейросетевого компонента с обратной связью.
В структуре нейросетевого комплекса условно можно выделить два функциональных контура: наблюдаемости и управляемости. Эти функциональные образования с помощью введенных в них нейросетевых компонентов решают непосредственно задачу повышения уровня наблюдаемости и управляемости. Задача, решаемая всем нейросетевым комплексом, заключается в поиске оптимального решения по подбору конфигурации НАКУ КА и измерений за счет повышения наблюдаемости и управляемости. В процессе эксплуатации НАКУ КА формируются входные данные, которые представляют собой формализованную информацию: по техническому состоянию средств НАКУ КА и измерений (комплекс мониторинга технического состояния); по анализу текущей обстановки (комплекс оценки обстановки); по анализу задач по управлению космическими аппаратами и измерениям (комплекс анализа задач по управлению космическими аппаратами и измерениям). Выходные данные комплекса мониторинга технического состояния содержат в себе информацию об исправности средств и регламентных работах. Комплекс оценки текущей обстановки получает от ЦУП и командных пунктов ОКИК информацию по текущей обстановке: ведению повседневной деятельности, приведению в штатную готовность. Эти данные являются для него выходными. Комплекс анализа задач выводит данные из планов задействования средств (краткосрочного, среднесрочного, долгосрочного), полученных из ЦУП и командных пунктов.
Сформированная и формализованная информация передается в нейросетевой компонент комплекса, который состоит из четырех взаимоувязанных нейронных сетей: технических средств НАКУ КА и измерений; синаптических весов и связей; анализа бесконфликтности; подбора средств НАКУ КА и измерений. Нейросеть технических средств НАКУ КА и измерений получает от комплекса мониторинга информацию по составу средств, готовых к работе. Нейросеть синаптических весов и связей получает информацию от комплекса оценки текущей обстановки и в зависимости от того, какой период обстановки, определяются весовые коэффициенты связей (синапсов). Нейросеть анализа бесконфликтности связана с базой знаний выходного слоя и проверяет полученные результаты на бесконфликтность, чтобы исключить дублирование технических средств НАКУ КА в различных задачах управления космическими аппаратами и проведения измерений.
Данные полученные в результате работы трёх первых из вышеуказанных сетей передаются в нейросеть подбора средств, где происходит принятие решения и в формализованном виде передаётся в комплекс реализации конфигурации НАКУ КА и измерений, который является исполнительным органом выходного слоя нейрокомплекса и непосредственно осуществляет управляющее воздействие на конфигурацию технических средств НАКУ КА. Выходной слой содержит в себе новую конфигурацию НАКУ КА и измерений согласно решаемой задаче, текущей обстановке и состоянию технических средств. Структура информации, полученная в результате работы нейросетевого комплекса, представляет собой: базу знаний нейросети, которая используется для обеспечения обратной связи (рекуррентная структура), машинного обучения, создания шаблонов и правил для дальнейшей работы; визуальный компонент, выводимый на комплексы средств отображения информации.
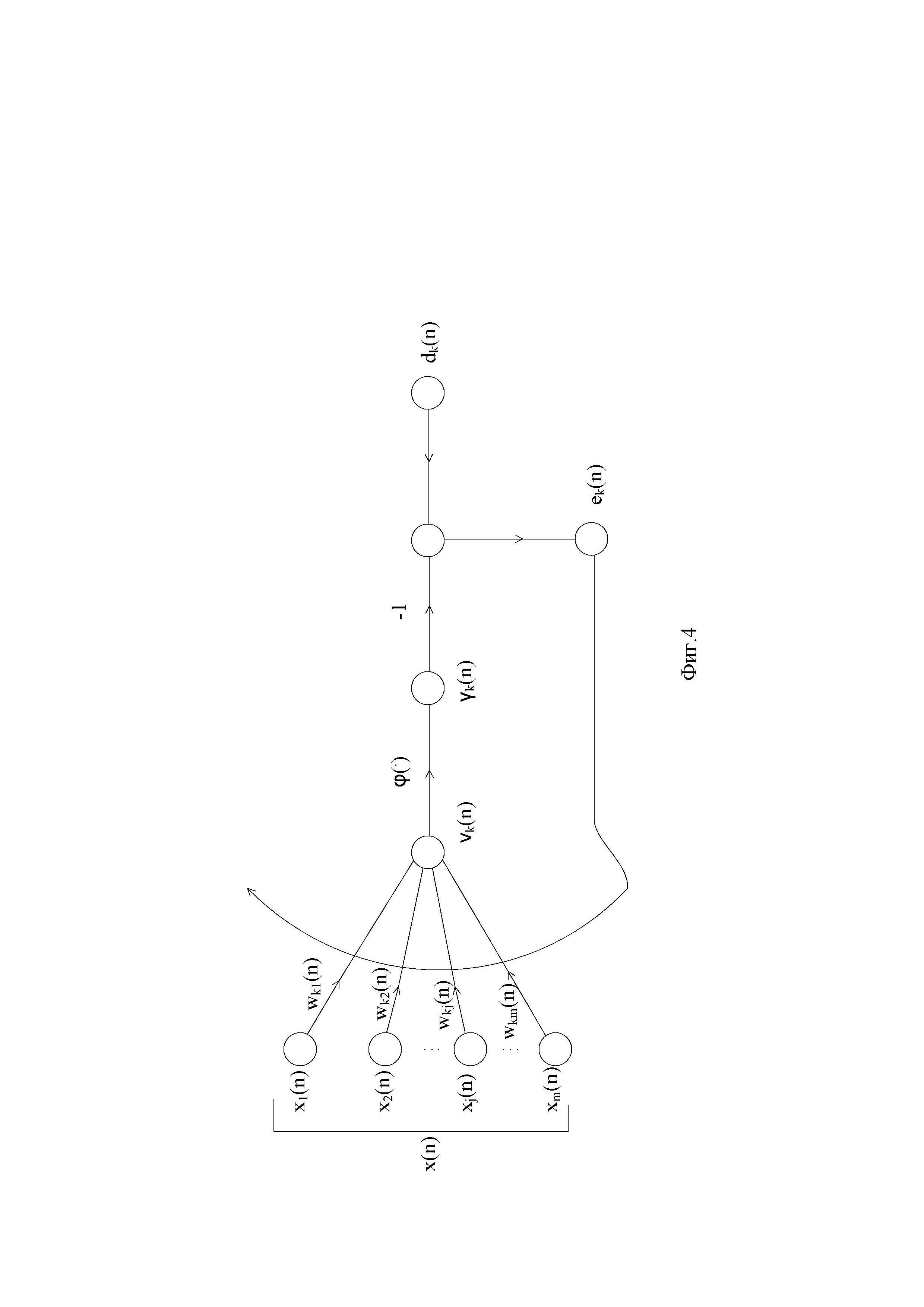
Элементом искусственного интеллекта нейросетевого комплекса является модуль самообучения, использующий в своей работе накопленные знания и опыт. Важно заметить, что искусственный интеллект решает три задачи: накопление знаний, извлечение знаний с целью обучения и решение проблемы с учетом накопленных знаний. Под «знаниями» понимается декларативные данные, то есть статический набор фактов, помещенных в базу знаний. Для случая управления реконфигурацией НАКУ КА предлагается использовать модель обучения, основанную на коррекции ошибки (с применением метода оптимальной фильтрации). У этой модели есть ряд преимуществ: в качестве алгоритма оптимизации используется минимизация среднеквадратичной ошибки (LMS); подходит для линейных систем с одной обратной связью; использует «мягкую» сигмоидальную функцию для функции активации.
Для вектора сигнала  устанавливается свой синаптический вес
устанавливается свой синаптический вес  для каждого элемента
для каждого элемента  . Выходной сигнал
. Выходной сигнал  сравнивается с желаемым выходом
сравнивается с желаемым выходом  в результате получается сигнал ошибки
в результате получается сигнал ошибки  . В результате имеем
. В результате имеем
|
где n – номер шага (итерации) процесса корректировки синоптических весов нейрона k, φ(.) – функция активации,  – суммарный синаптический вес нейрона k.
– суммарный синаптический вес нейрона k.
Сигнал ошибки производит корректировки синаптических весов нейрона путем пошагового приближения значения выходного сигнала c желаемым выходом .
Как было сказано выше, оптимальной фильтрацией в этой модели выступает алгоритм LMS. Несмотря на свою простоту, он является достаточно эффективным способом при корректировки весов нейрона. Суть его заключается в минимизации текущего значения энергии ошибки:  .
.
Минимизация энергии ошибки выполняется по дельта правилу или правилу Видроу-Хоффа, которое гласит, что «корректировка синаптического веса нейрона пропорциональна произведению сигнала ошибки на выходной сигнал его вызвавший», отсюда имеем
|
где η – положительная константа, которая характеризует скорость обучения.
Вычислив  можно вычислить следующий шаг дискретизации:
можно вычислить следующий шаг дискретизации:
|
Таким образом можно рассмотреть и
и  , как новое и старое значение синаптического веса и иначе представить (3) можно как
, как новое и старое значение синаптического веса и иначе представить (3) можно как
|
где – оператор единичной задержки или элемент памяти.
– оператор единичной задержки или элемент памяти.
Итак, если перейти от теоретических принципов построения блока обучения нейросетевого комплекса к структурной схеме получаем рекуррентную сеть с одной обратной связью. Под базой знаний здесь понимается хранимая информация с обучающими данными (прецедентами), используемая нейросетевым комплексом для интерпретации, предсказания и реакции на внешние события. Под обучающими данными понимается хранимая в формализованном виде конфигурация НКУ КА, КСИСО или НИК, которые эффективно отработали или работают в данный момент и у которых известны коэффициенты наблюдаемости и управляемости.
Нейрокомплекс извлекает (модуль сопоставления и принятия эффективных решений) из базы знаний прецедент (схожую конфигурацию НКУ, КСИСО, НИК) проводит сравнение с подобранной конфигурацией. Результатом сравнения становится принятие или отклонение новой конфигурации. Критерием принятия служит сравнение коэффициентов наблюдаемости и управляемости новой конфигурации, с извлеченной (прецедентной) из базы знаний эффективной конфигурацией НАКУ КА. На данном этапе происходит вычисление сигнала ошибки  и его энергия E(n). Конфигурация отправляется на коррекцию в нейросетевой блок и повторяются все операции по построению новой конфигурации, но уже с другими показателями синаптических весов. Коррекция синаптических весов проводится по формуле (2), сразу запускается следующая итерация и так до тех пор, пока энергия сигнала ошибки, то есть среднеквадратичные отклонения показателей наблюдаемости и управляемости не достигнут некоторого устойчивого (оптимального) значения. В таком случае новая конфигурация НАКУ КА принимается. Заметим, что начальные показатели синаптических весов выставляются исходя из того, какая модель окружающей обстановки задана на входе.
и его энергия E(n). Конфигурация отправляется на коррекцию в нейросетевой блок и повторяются все операции по построению новой конфигурации, но уже с другими показателями синаптических весов. Коррекция синаптических весов проводится по формуле (2), сразу запускается следующая итерация и так до тех пор, пока энергия сигнала ошибки, то есть среднеквадратичные отклонения показателей наблюдаемости и управляемости не достигнут некоторого устойчивого (оптимального) значения. В таком случае новая конфигурация НАКУ КА принимается. Заметим, что начальные показатели синаптических весов выставляются исходя из того, какая модель окружающей обстановки задана на входе.
После принятия новая конфигурация НАКУ КА проверяется на бесконфликтность (комплекс анализа бесконфликтности). Под бесконфликтностью понимается исключение возможности одновременного применения одного и того же средства в двух разных конфигурациях НАКУ КА (НКУ, КСИСО и НИК). После проверки на бесконфликтность новая конфигурация НАКУ КА отправляется на комплекс введения в действие. Здесь происходит взаимодействие «человек – машина». Оператор должен подтвердить и ввести в действие новую конфигурацию НАКУ КА. После подтверждения данная конфигурация помещается в базу знаний нейрокомплекса.
Для перехода от абстрактных определений наблюдаемости и управляемости к количественным показателям предлагается использовать следующие допущения и определения, а именно дать определение наблюдаемости и управляемости.
Наблюдаемость – свойства, позволяющие определить начальное состояние НАКУ КА, а именно исправность технических средств НАКУ КА; - проведение регламентных работ; задействование технического средства в текущих работах; наличие операторов, обслуживающего персонала для выполнения задач управления и измерений; периоды неработоспособности средств. Данное свойство можно описать с помощью матрицы технического состояния или наблюдаемости (см. таблицу 1), в которой единица означает, что техническое средство исправно и готово к работе по назначению, а нуль, что техническое средство неисправно и не готово.
Таблица 1
|




Управляемость – свойство, позволяющее перевести НАКУ КА из одного работоспособного состояния в другое. Критериями управляемости являются скорость реконфигурации НАКУ КА, быстродействие управляющего воздействия и возможность реализации новой конфигурации НАКУ КА. Данное свойство можно описать с помощью матрицы управления (см. таблицу 2), в которой  – время проведения реконфигурации;
– время проведения реконфигурации;  – время верификации центром управления полетами и командными пунктами новой конфигурации НКУ, КСИСО, НИК. Значение – единица принимаем при времени от 0 до 10 мин и при условии, если конфигурация может быть реализована. Значение – нуль принимаем при времени >10 мин и при условии, если конфигурация невыполнима.
– время верификации центром управления полетами и командными пунктами новой конфигурации НКУ, КСИСО, НИК. Значение – единица принимаем при времени от 0 до 10 мин и при условии, если конфигурация может быть реализована. Значение – нуль принимаем при времени >10 мин и при условии, если конфигурация невыполнима.
Таблица 2
|





База знаний реализуется в виде распределенной реплицируемой базы данных с высокой надежностью и криптозащищенностью. Технология, которая позволяет это сделать, получила название блокчейн (англ. blockchain). В общем случае, блокчейн – это цепочка взаимоувязанных между собой записей (хэш-блоков), распределенная по сети, не имеющая единого центра управления. Важной особенностью блоков является то, что каждый новый блок содержит в себе информацию обо всех предыдущих. Каждый участник сети блокчейн имеет доступ ко всем записям, при этом изменить или удалить запись никто не может, только внести новую. Верификацию внесения такой записи (добавление хэш-блока) осуществляют все участники сети блокчейн.
Вначале формируется нулевой блок. Он особый, создаётся без правил, это может быть состав технических средств НАКУ КА, служебная или справочная информация, а также тренировочные конфигурации НАКУ КА. Далее, когда возникает необходимость записать в базу знаний новую реализованную конфигурацию НАКУ КА, добавляется новый блок, который состоит из формализованных данных о новой конфигурации, а также записи хэш-суммы предыдущего, т.е нулевого блока. Далее цепочка продолжается, каждый раз добавляя к новой записи хеш-сумму предыдущего блока, образуя таким образом цепочку взаимоувязанных хэш-блоков. Важно отметить, что хэш-сумма может записываться по определенному правилу, например, чтобы в конце нее всегда стоял нуль, тогда к блоку добавляется проверочное число  (случайное перебираемое число, англ. nonce) и сеть подбирает его таким образом, чтобы хэш этого блока заканчивался на ноль, и так для каждого блока в цепочке. Это обеспечивает криптозащищенность сети блокчейн, однако при этом требует несколько больших вычислительных ресурсов.
(случайное перебираемое число, англ. nonce) и сеть подбирает его таким образом, чтобы хэш этого блока заканчивался на ноль, и так для каждого блока в цепочке. Это обеспечивает криптозащищенность сети блокчейн, однако при этом требует несколько больших вычислительных ресурсов.
Из вышесказанного очевидно, что реализация блокчейн технологии в нейрокомплексе управления реконфигурацией НАКУ КА, позволит создать распределённую, реплицируемую, криптозащищенную базу знаний, а также позволит увеличить показатели устойчивости и надежности НАКУ КА в целом. Таким образом, предложенная модель построения модуля обучения нейросетевого комплекса, а также принцип построения базы знаний даёт возможность решить проблему управления направленной реконфигурацией НАКУ КА. Интеграция нейросетевых технологий, элементов искусственного интеллекта и блокчейна в прикладную сферу, а именно в НАКУ КА, создаст положительный синергетический эффект. Изобретение позволит получить универсальный инструмент для создания динамических контуров управления космическими аппаратами и проведения измерений во времени близком к реальному. Также, благодаря рекуррентной структуре нейросети позволит системе НАКУ КА самообучаться и принимать неочевидные для человека решения на основе накопленных знаний.
Диодный лазер с внешним резонатором
Система защищённой передачи данных
Способ определения собственного местоположения судна на основе сигналов автоматической идентификационной системы и устройство для его осуществления
Способ разделения пластин на чипы и получения сквозных отверстий большой площади для изделий микроэлектроники
Космический аппарат для утилизации космического мусора
Способ получения и обработки изображений, искажённых турбулентной атмосферой
Свч фильтр на основе интегрированного в подложку волновода и способ его изготовления
Способ и устройство для нелинейного уплотнения навигационного сигнала глонасс
Спутниковая система, управляемая по межспутниковой радиолинии
Способ изготовления сквозных микроотверстий в кремниевой подложке
Унифицированный командно-измерительный пункт

