Результат интеллектуальной деятельности: Способ и устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС
Вид РИД
Изобретение
Заявленная группа изобретений относится к системам формирования сигнала спутниковой радионавигационной системы ГЛОНАСС, а именно к средствам управления передачей сигнала и его коррекции.
Из уровня техники известны системы формирования навигационного сигнала ГЛОНАСС, в частности способ формирования группового сигнала ГЛОНАСС (см. статья А.Ю. Середа, К.В. Детюк «Бортовой информационно-навигационный комплекс КА «ГЛОНАСС-К». Инженерный вестник Дона №3, том. 21, 2012, стр. 115-119, Издательство Северо-Кавказский научный центр высшей школы федерального государственного автономного образовательного учреждения высшего профессионального образования Южный федеральный университет) (1) при помощи которого осуществляется формирование и излучение навигационных сигналов с частотным разделением в диапазонах L1, L2, а именно сигналов с открытым доступом L1OF, L2OF, и сигналов с санкционированным доступом L1SF, L2SF, также, при помощи него осуществляется формирование и излучение навигационного сигнала с кодовым подразделением в диапазоне L3, а именно сигнала с открытым доступом L3OC. Недостатком указанной в качестве наиболее близкого аналога системы (1) является то, что при помощи нее невозможно формировать и излучать сигнал с кодовым разделением в диапазонах L1, L2, что порождает дополнительные взаимные задержки между формируемыми сигналами с частотным и кодовым разделением, приводя к погрешности формирования сигнала.
Техническим результатом предложенной группы изобретений является снижение частоты дискретизации формирователя, а также упрощение реализации данной схемы на цифровых устройствах посредством реализации всех вычислений в табличном виде.
Технический результат заявленного изобретения достигается посредством создания группы изобретений способа нелинейного уплотнения группового навигационного сигнала ГЛОНАСС, включающего формирование навигационных сигналов с кодовым и частотным разделением в диапазонах L1, L2 и сигнала с кодовым разделением L3, их усиление и излучение через одну антенну, при котором сигналы с кодовым и частотным разделением в каждом из диапазонов L1, L2 образуют суммарный сигнал, имеющий амплитудную модуляцию, при этом цифровой формирователь навигационного сигнала с частотным и кодовым разделением выполнен в виде устройства нелинейного уплотнения группового навигационного сигнала, которое формирует групповой навигационный сигнал, описываемый следующей функцией
s(t)=sign[sL1SC(t)+sL1OC(t)+sBT(t)+sCT(t)]⋅exp(j2πƒ0t),
где ƒ0 - несущая частота составного сигнала,
sign(z) - операция амплитудного ограничения,
sL1SC(t), sL1OC(t), sBT(t), sCT(t) - комплексные сигналы,
ƒ1=(1,005+k⋅0,5625) - разница, в мегагерцах, между несущей частотой сигналов высокой точности ВТ и стандартной точности СТ и несущей частотой сигналов L1SC и L1OC, выровненный сигнал sign[sL1SC(t)+sL1OC(t)+sBT(t)+sCT(t)] является модулирующим сигналом, его синфазная составляющая подается на синфазный (I) вход квадратурного модулятора, а квадратурная составляющая - на квадратурный (Q) вход, по формуле определяющей входные сигналы квадратурного модулятора:


сигналы I(t) и Q(t) формируют цифровым способом, при этом функции sin, cos, а также функция  могут быть реализованы только табличным способом.
могут быть реализованы только табличным способом.
В частном случае выполнения способа вычисления I(t) и Q(t) реализуют в форме табличной функции фаз компонент.
Также технический результат достигается за счет создания устройства для нелинейного уплотнения навигационного сигнала ГЛОНАСС. Устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС содержит бортовое синхронизирующее устройство, соединенное с цифровым распределителем сигналов, который содержит цифровой формирователь навигационного радиосигнала L1 с частотным и кодовым разделением, выполняющее функции устройства нелинейного уплотнения, соединенный с усилителем мощности навигационного радиосигнала L1 с частотным и кодовым разделением, который соединен с режекторным фильтром, цифровой формирователь навигационного радиосигнала L2 с частотным и кодовым разделением, соединенный с усилителем мощности навигационного радиосигнала L2 с частотным и кодовым разделением, цифровой формирователь навигационного радиосигнала L3 с кодовым разделением, соединенный с усилителем мощности навигационного радиосигнала L3 с кодовым разделением, с режекторного фильтра и усилителей мощности навигационного радиосигнала L2 с частотным и кодовым разделением и навигационного радиосигнала L3 с кодовым разделением сигнал передается на триплексер и далее на антенну, при этом устройство нелинейного уплотнения содержит генератор псевдослучайной последовательности навигационного сигнала L1SC соединенный с входом сумматором (15), генератор псевдослучайной последовательности навигационного сигнала L1BT, соединенного с блоком умножения на коэффициент а (26), который соединен со входами перемножителей (20) и (22), выход перемножителя (20) соединен со входом сумматора (16), выход перемножителя (22) соединен со входом сумматора (17), генератор псевдослучайной последовательности навигационного сигнала L1CT соединен с блоком умножения на коэффициент а (27), соединенный выходом со входом перемножителей (21) и (23), выход перемножителя (21) соединен с входом сумматора (16), а выход перемножителя (23) с входом сумматора (17), генератор псевдослучайной последовательности навигационного сигнала L1OC соединен с входом сумматора (18), выход сумматора (16) соединен с входом сумматора (15), выход сумматора (17) соединен со входом сумматора (18), выходы сумматоров (15) и (18), соединены с формирователем входных сигналов квадратурного модулятора, формирующего на выходе синфазную составляющую модулирующего сигнала I(t), которая подается на синфазный (I) вход квадратурного модулятора, на вход перемножителя (24), выход которого соединен с сумматором (19) и квадратурную составляющую Q(t) модулирующего сигнала, которая подается на квадратурный (Q) вход квадратурного модулятора, на вход перемножителя (25), выход которого соединен со входом сумматора (19), входы перемножителей (24) и (25) соединены с фазовращателем (29).
Заявленное изобретение проиллюстрировано следующими схемами:
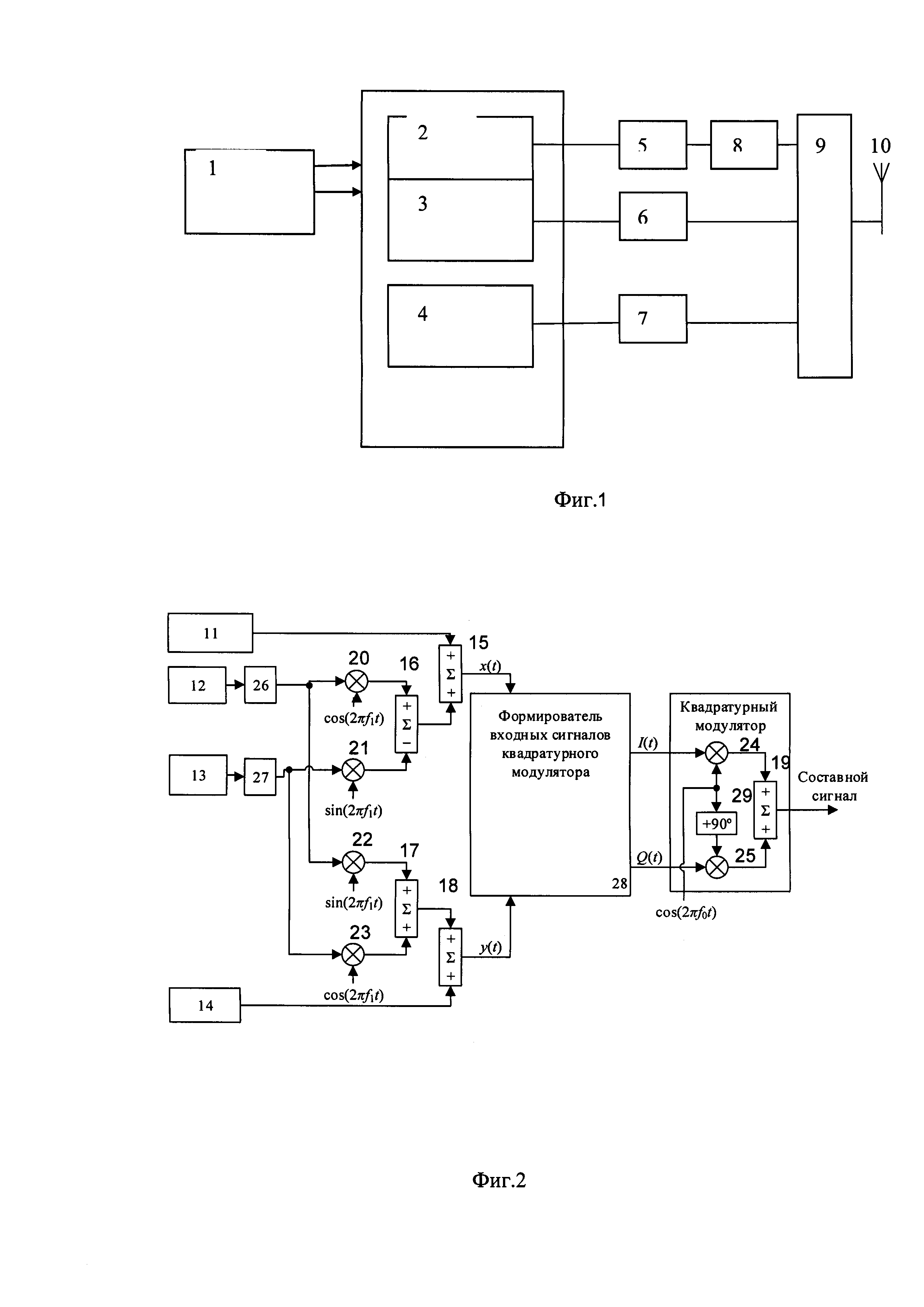
Фиг. 1 - Схема построения бортового информационно-навигационного комплекса,
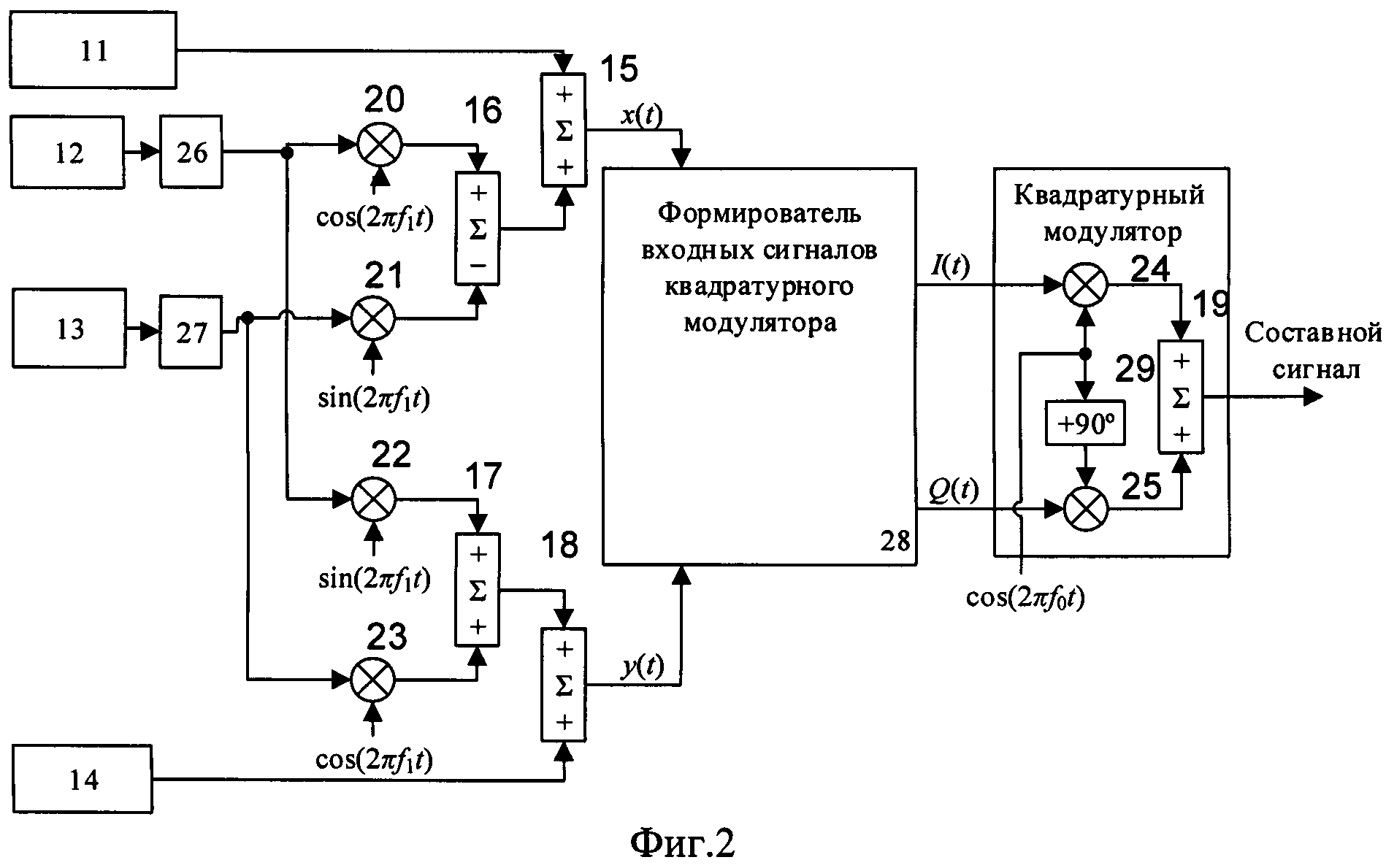
Фиг. 2 - Схема построения УНУ сигналов ГЛОНАСС в диапазоне L1,
На чертежах обозначено следующее:
1 - Бортовое синхронизирующее устройство;
2 - Цифровой формирователь навигационного радиосигнала L1 с частотным и кодовым разделением, выполняющее функции устройства нелинейного уплотнения;
3 - Цифровой формирователь навигационного радиосигнала L2 с частотным и кодовым разделением;
4 - Цифровой формирователь навигационного радиосигнала L3 с кодовым разделением;
5 - Усилитель мощности навигационного радиосигнала L1 с частотным и кодовым разделением;
6 - Усилитель мощности навигационного радиосигнала L2 с частотным и кодовым разделением;
7 - Усилитель мощности навигационного радиосигнала L3 с кодовым разделением;
8 - Режекторный фильтр;
9 - Триплексер;
10 - Антенна;
11 - Генератор псевдослучайной последовательности навигационного сигнала L1SC;
12 - Генератор псевдослучайной последовательности навигационного сигнала L1BT;
13 - Генератор псевдослучайной последовательности навигационного сигнала L1CT;
14 - Генератор псевдослучайной последовательности навигационного сигнала L1OC;
15, 16, 17, 18, 19 - Сумматоры;
20, 21, 22, 23, 24, 25 - Перемножители;
26, 27 - блок умножения на коэффициент а;
28 - формирователь входных сигналов квадратурного модулятора;
29 - фазовращатель.
Способ нелинейного уплотнения группового навигационного сигнала ГЛОНАСС осуществляется следующим образом. Формирование группового выровненного навигационного сигнала, подробно раскрытое в заявке на изобретение RU 2017133048 от 22.09.2017 [1], включает формирование навигационных сигналов с кодовым и частотным разделением в диапазонах L1, L2 и сигнала с кодовым разделением L3, их усиление и излучение через одну антенну, при котором сигналы в диапазонах L1, L2 с кодовым и частотным разделением суммируются на входе усилителя мощности при этом образуется суммарный сигнал, имеющий амплитудную модуляцию, далее групповой сигнал синтезируют методом оптимального выравнивания для этого все сигналы представляются в комплексной форме, далее сигнал преобразуется в выравнивателе, который исключает амплитудную модуляцию.
Возможен альтернативный способ формирования группового выровненного навигационного сигнала, отличающийся тем, что формирование осуществляется на нулевой поднесущей частоте и вся процедура формирования может быть реализована в табличном виде, удобном для реализации в цифровых устройствах.
Схема построения бортового информационно-навигационного комплекса (фиг. 1) для излучения через одну антенну аналогична схеме, предложенной в [1]. Отличием является устройство нелинейного уплотнения (УНУ) группового навигационного сигнала, объединяющего кодовые и частотные радиосигналы. Формируемый групповой сигнал описывается следующей комплексной функцией:

где ƒ0 - несущая частота составного сигнала, выбранная равной 1600,995 МГц, для упрощения УНУ.
sign(z) - операция амплитудного ограничения, приравнивает модуль комплексного числа z к единице, а аргумент оставляет неизменным, в соответствии с формулой 
sL1SC(t), sL1OC(t), sBT(t), sCT(t) - комплексные сигналы, определяемые по формулам:
sL1SC(t)=ПСПL1SC(t),
sL1OC(t)=j⋅ПСПL1OC(t),
sBT(t)=ПСПВТ(t)⋅a⋅exp[j2πƒ1t]=ПСПВТ(t)⋅a⋅[cos(2πƒ1t)+j⋅sin(2πƒ1t)],
sCT(t)=ПСПСТ(t)⋅а⋅exp[j(2πƒ1t+π/2)]=ПСПСТ(t)⋅а⋅[cos(2πƒ1t+π/2)+j⋅sin(2πƒ1t+π/2)]=ПСПСТ(t)⋅а⋅[-sin(2πƒ1t)+j⋅cos(2πƒ1t)];
ПСПL1SC(t), ПСПL1OC(t), ПСПВТ(t), ПСПСТ(t) - модулирующие последовательности навигационных сигналов L1SC, L1OC, L1BT, L1CT, принимающие значения {1; -1};
где:
L1OC - сигнал открытого доступа с кодовым разделением в диапазоне L1;
L1SC - сигнал санкционированного доступа с кодовым разделением в диапазоне L1;
L1BT - сигнал высокой точности с частотным разделением в диапазоне L1;
L1CT - сигнал стандартной точности с частотным разделением в диапазоне L1;
а - коэффициент, подобранный так, чтобы в составном сигнале мощность сигналов ВТ и СТ была в два раза меньше мощности сигналов L1SC и L1OC;
ƒ1=(1,005+k⋅0,5625) - разница, в мегагерцах, между несущей частотой сигналов ВТ и СТ и несущей частотой сигналов L1SC и L1OC.
Формула (1) является основой для построения УНУ. Выровненный сигнал sign[sL1SC(t)+sL1OC(t)+sBT(t)+sCT(t)] является модулирующим сигналом. Его синфазная составляющая подается на синфазный (I) вход квадратурного модулятора, а квадратурная составляющая - на квадратурный (Q) вход. Множитель ехр(j2πƒ0t) описывает перенос модулирующего сигнала на несущую частоту ƒ0.
В суммарном сигнале [sL1SC(t)+sL1OC(t)+sBT(t)+sCT(t)] можно выделить синфазную x(t) и квадратурную y(t) часть:

Отсюда получаем формулу, определяющую входные сигналы квадратурного модулятора:

Схема формирования составного сигнала, в соответствии с формулами (1)-(3), приведена на фиг. 2. В этой схеме энергетические потери составляют 17,17%. Сигналы I(t) и Q(t) должны формироваться цифровым способом. При этом функции sin, cos, а также функция  могут быть реализованы только табличным способом. Возможна также реализация вычисления I(t) и Q(t) в форме табличной функции фаз компонент. Это уменьшит объем хранимых данных, а также исключит операции суммирования и умножения, используемые в схеме на фиг. 2.
могут быть реализованы только табличным способом. Возможна также реализация вычисления I(t) и Q(t) в форме табличной функции фаз компонент. Это уменьшит объем хранимых данных, а также исключит операции суммирования и умножения, используемые в схеме на фиг. 2.
Устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС содержит бортовое синхронизирующее устройство (1), соединенное с цифровым формирователем радиосигнала, содержащего цифровой распределителем сигналов (2), который содержит цифровой формирователь навигационного радиосигнала L1 с частотным и кодовым разделением, выполняющий функции устройства нелинейного уплотнения, соединенный с усилителем мощности навигационного радиосигнала L1 с частотным и кодовым разделением (5), который соединен с режекторным фильтром (8); цифровой формирователь навигационного радиосигнала L2 с частотным и кодовым разделением (3), соединенный с усилителем мощности навигационного радиосигнала L2 с частотным и кодовым разделением (6); цифровой формирователь навигационного радиосигнала L3 с кодовым разделение (4), соединенный с усилителем мощности навигационного радиосигнала L3 с кодовым разделением (7), с режекторного фильтра (8) и усилителей мощности навигационного радиосигнала L2 с частотным и кодовым разделением (6) и навигационного радиосигнала L3 с кодовым разделением (7) сигнал передается на триплексер (9) и далее на антенну (10).
Устройство нелинейного уплотнения содержит генератор псевдослучайной последовательности навигационного сигнала L1SC (11), соединенный с входом сумматором (15), генератор псевдослучайной последовательности навигационного сигнала L1BT (12), соединенный с блоком умножения на коэффициент а (26), который соединен со входами перемножителей (20) и (22), выход перемножителя (20) соединен со входом сумматора (16), выход перемножителя (22) соединен со входом сумматора (17), генератор псевдослучайной последовательности навигационного сигнала L1CT (13) соединен с блоком умножения на коэффициент а (27), соединенный выходом со входом перемножителей (21) и (23), выход перемножителя (21) соединен с входом сумматора (16), а выход перемножителя (23) с входом сумматора (17), генератор псевдослучайной последовательности навигационного сигнала L1OC (14) соединен с входом сумматора (18), выход сумматора (16) соединен с входом сумматора (15), выход сумматора (17) соединен со входом сумматора (18), выходы сумматоров (15) и (18), соединены с формирователем входных сигналов квадратурного модулятора (28), формирующего на выходе синфазную I(t) составляющую модулирующего сигнала, которая подается на синфазный (I) вход квадратурного модулятора, на вход перемножителя (24), выход которого соединен с сумматором (19) и квадратурную Q(t) составляющую модулирующего сигнала, которая подается на квадратурный (Q) вход квадратурного модулятора, на вход перемножителя (25), выход которого соединен со входом сумматора (19), входы перемножителей (24) и (25) соединены с фазовращателем (29).
Предложенная система формирования группового навигационного сигнала ГЛОНАСС позволяет снизить частоту дискретизации формирователя, а также допускает реализацию всех вычислений в табличном виде, что упрощает реализацию данной схемы на цифровых устройствах.


Способ дистанционного зондирования земли
Способ радиоподавления несанкционированных каналов космической радиолинии "космический аппарат - земля" и система для его реализации
Наземный комплекс управления спутниковой навигационной системой
Делитель мощности для бортовой аппаратуры космического аппарата
Устройство для измерения электрических параметров операционных усилителей и компараторов напряжения
Наземная система контроля и управления бортовой аппаратурой межспутниковых измерений навигационной системы, например для системы глонасс
Способ получения заполненных переходных металлизированных сквозных отверстий печатной платы
Способ радиометрической коррекции изображения от многоэлементного фотоприёмника инфракрасного диапазона
Двунаправленный тепловой микромеханический актюатор и способ его изготовления
Способ дистанционного мониторинга рисовых оросительных систем
Автоматическое нагнетательное устройство высоковязких материалов
Способ формирования сигнала спутниковой навигационной системы
Модернизированная спутниковая навигационная система глонасс
Способ формирования группового навигационного сигнала глонасс
Способ расширения полосы навигационных сигналов глонасс с помощью меандровой поднесущей модуляции
Бортовой информационно-навигационный комплекс
Устройство для электропорации
Устройство для электропорации

