Результат интеллектуальной деятельности: СПОСОБ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА ЗАСЕЧКОЙ ДАЛЬНОСТИ И УГЛА МЕСТА С ПЕРВОГО ИЗМЕРИТЕЛЬНОГО ПУНКТА И УГЛА МЕСТА - СО ВТОРОГО
Вид РИД
Изобретение
Изобретение относится к области обнаружения и определения координат различных объектов (летательных аппаратов различного назначения, снарядов, ракет) и может быть использовано в военной технике.
В настоящее время известны различные способы определения координат объектов с использованием способов передачи и приема радиосигналов наземных радиомаяков (патент Российской Федерации №2436232) [1], способ триангуляции целей (патент Российской Федерации №2423720) [2]. Недостатками данных способов являются сложность обработки информации от пунктов обнаружения объектов, использование только активного радиолокационного диапазона электромагнитных волн, большое число измеряемых параметров.
Способ автоматизированного определения координат беспилотных летательных аппаратов (патент Российской Федерации №2523446) [3], заключается в применении камер кругового обзора, видеомонитора, ЭВМ и лазерного дальномера для подсветки летательного аппарата. Камеры кругового обзора размещают симметрично и направляют в разные стороны, так чтобы вести наблюдение на 360° по горизонту в оптическом диапазоне электромагнитных волн. Появление летательного аппарата фиксируется автоматически как помеха, возникающая на кадре видеопоследовательности относительно предыдущего, а полученные данные обрабатываются на ЭВМ, где рассчитываются угловые координаты летательного аппарата относительно центра углоизмерительного устройства, которое с помощью поворотных механизмов направляет лазерный дальномер на летательный аппарат для измерения дальности до него. Измеренная дальность поступает на устройство обработки и отображения информации, где происходит определение прямоугольных координат объекта (XГО; hГО; YГО).
Способ определения координат летательных аппаратов на основе использования двух дирекционных углов и одного угла места (патент Российской Федерации №260149) [4], заключается в измерении указанных параметров с двух пунктов сопряженного наблюдения, с последующим пересчетом величин (α1, α2, ε2) в координаты объекта.
Общим недостатком данных способов определения координат летательных аппаратов является определенная избыточность информации о положении объекта, неполное использование данных измерений и как следствие немаксимальная точность, а также отсутствие способов оценки точности координат и их коэффициента корреляции.
Задачей, стоящей перед настоящим изобретением, является разработка способа получения координат измеряемого объекта при наличии минимально необходимого для получения результата объема информации, оценка точности позиционирования объекта и зависимости координат.
Поставленная задача решается следующим образом.
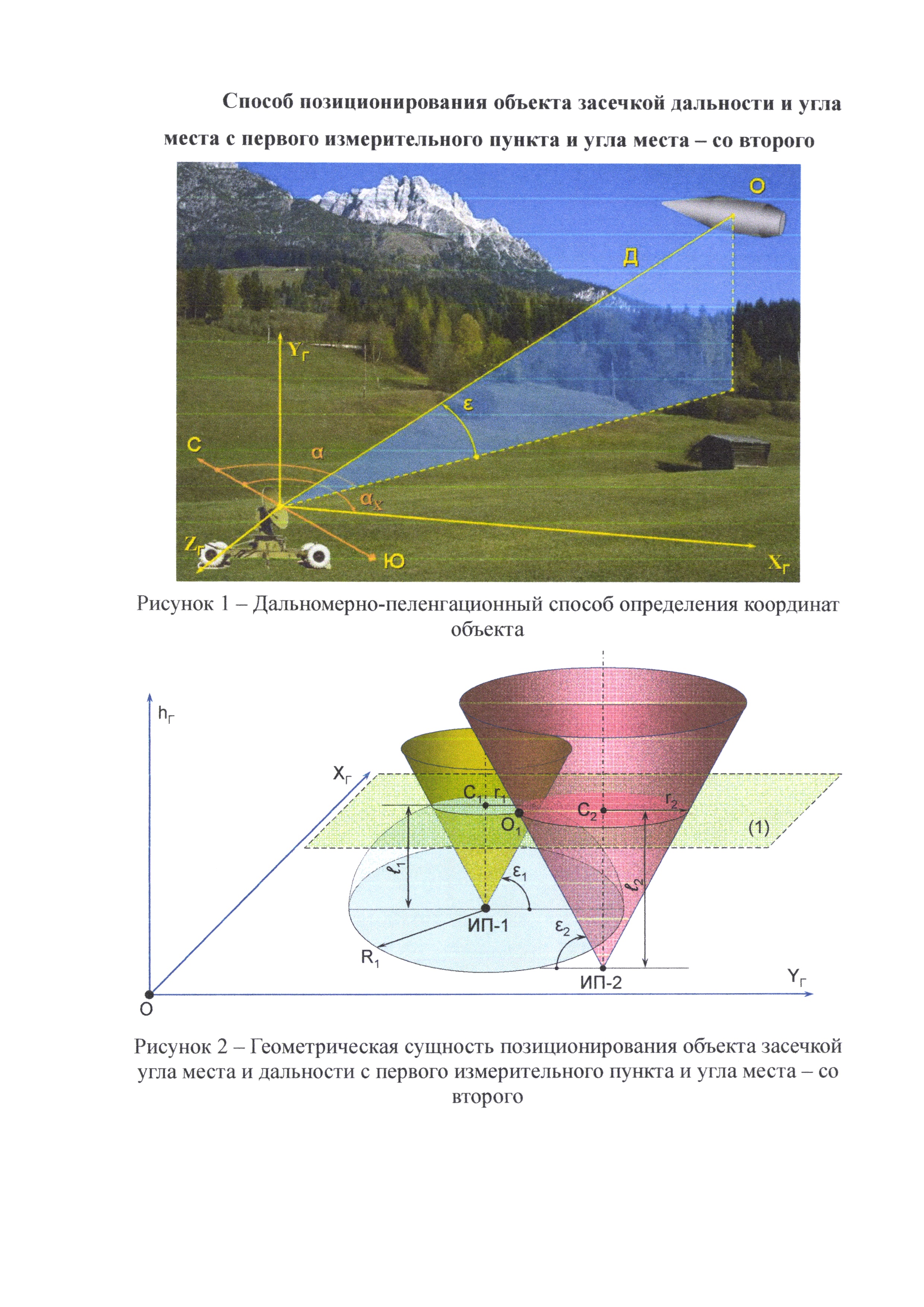
В настоящее время дальномерно-пеленгационный метод определения координат объектов широко распространен в практике оптических и радиолокационных измерений (рис. 1). Он основан на измерении угловых координат объекта в горизонтальной (азимут А или дирекционный угол α) и вертикальной плоскостях (угол места ε), а также дальности до него R (рис. 1). В простейшем случае организации таких измерений достаточно одного измерительного пункта с известными координатами (XГ, hГ; YГ), чтобы по величинам (α, ε, R) однозначно определить пространственные координаты летательного аппарата по зависимостям
С целью повышения надежности получения траекторией информации количество измерительных пунктов увеличивают до двух-четырех единиц. При этом на каждом из них проводятся аналогичные измерения трех сферических координат объекта (αi, εi, Ri). В этом случае возникает некоторая избыточность информации, определяемая разностью между числом регистрируемых параметров и числом степеней свободы объекта равном трем. В случае двух измерительных пунктов синхронно регистрируется шесть параметров (α1, ε1, R1) (α2, ε2, R2), где индекс показывает номер измерительного пункта. Чаще всего вторая тройка чисел используется по аналогии с первой для вычисления координат объекта по зависимостям (1) и служит только для контроля вычислений. В тоже время любая тройка чисел из шести измеренных параметров (α1, ε1, R1, α2, ε2, R2), позволяет определить координаты объекта. При таком способе обработки большая часть полученной траекторной информации теряется, а возможности измерительной техники используются не в полной мере. В случае получения неполной информации с измерительных средств использовать канонические зависимости дальномерно-пеленгационного способа (1) не представляется возможным. Поэтому возникает необходимость разработки способа определения положения объекта при неполных измерениях, одним из которых является случай регистрации трех величин - α1, ε2, R2 или α2, ε1, R1. Все дальнейшие выкладки для определенности выполнены для первого случая, а второй вариант можно получить из первого путем замены индексов «1» на «2» и «2» на «1».
Необходимо отметить, что при использовании тройки чисел α1, ε1, R2 имеет место совершенно иная геометрическая картина измерений. Здесь в отличие от рассматриваемого случая на первом измерительном пункте должны быть определены две величины (α1; ε1), а дальность до объекта измерения R2 определяется со второго измерительного пункта. В исследуемом варианте производства внешнетраекторных измерений на первом измерительном пункте регистрируются направление на исследуемый объект α1, а на втором - угол места ε2 и дальность до него R2. Данное обстоятельство требует решения принципиально иной геометрической задачи.
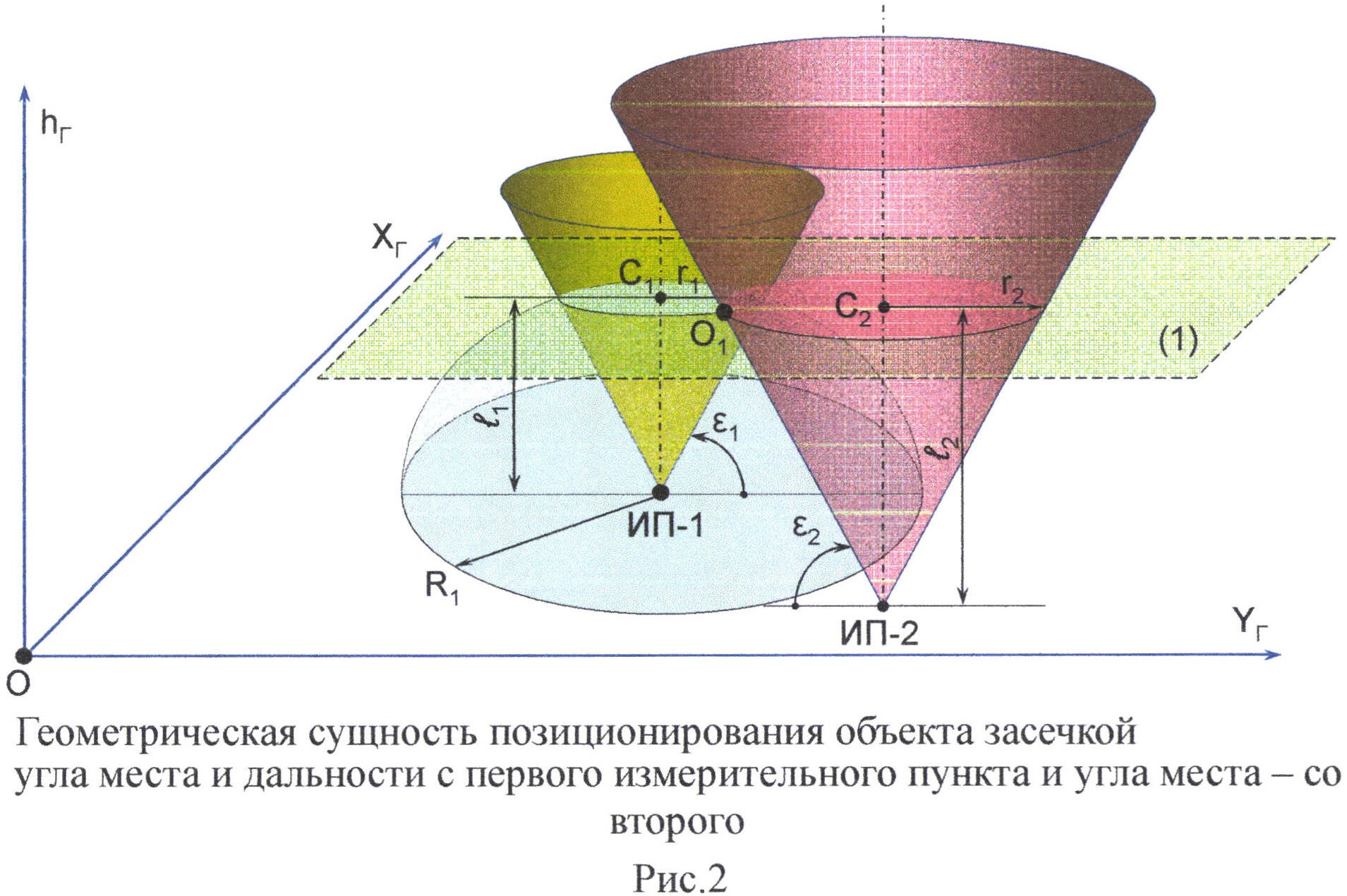
Математически задача формулируется следующим образом. Пусть известны географические координаты первого измерительного пункта ИП-1 (XГ1; hГ1; YГ1), с которого измерены угол места объекта ε1 и дальность до него R1, а также географические координаты второго измерительного пункта ИП-2 (XГ2; hГ2; YГ2), с которого измерен места объекта ε2. Необходимо найти географические координаты объекта (XГО; hГО; YГО) (рис. 2). Геометрически данная задача представляет собой поиск точек пересечения сферы и прямого вертикального кругового конуса с одним центром и другого прямого вертикального круглого конуса.
Геометрическим местом точек пересечения сферы и прямого вертикального круглого конуса с единым центром является окружность радиуса r1, лежащая в горизонтальной плоскости, на высоте  от ИП-1. Аппликата точки пересечения может быть найдена по зависимости
от ИП-1. Аппликата точки пересечения может быть найдена по зависимости

Радиус окружности, получаемой в сечении горизонтальной плоскости (1) на высоте hГО, можно найти по зависимости, очевидной из построения

Таким образом, уравнение окружности Окр1, лежащей в горизонтальной плоскости (1), полученной пересечением сферы и конуса, имеет вид

Горизонтальная плоскость (1) пересекает второй конус по окружности Окр2 радиуса r2, центр которой в плане совпадает с ИП-2. Радиус окружности r2 можно найти по зависимости

а ее уравнение имеет вид

Искомыми координатами объекта будут точки пересечения двух окружностей Окр1 и Окр2, лежащих в плоскости (1). Найдем решение задачи пересечения двух окружностей вида

С этой целью раскроем скобки

Вычтем из первого уравнения системы второе, получим
 .
.
Отсюда

или 
где 

Заменим в системе (6) второе уравнение на выражение (7), получим

Упростим данное выражение

Приведем подобные слагаемые

Найдем решение полученного квадратного уравнения и ординату объекта


Неизвестную абсциссу x1,2 определяют из выражения (7)

Исходными данными для расчетов являются 9 величин: arg(XГ1; hГ1; YГ1, XГ2; hГ2; YГ2; YГ2; ε1; R1; ε2), а решением - три величины (XГО; hГО; YГО).
Так как итоговая зависимость результатов расчетов от аргументов достаточно сложная, то для оценки точности координат целесообразно использовать метод линеаризации. В условиях рассматриваемого способа срединную ошибку координаты XГО можно найти по следующей зависимости:
где Е[XГО], D[XГО] - срединная ошибка и дисперсия определения координаты XГО объекта;
 - частная производная координаты XГО по дальности до объекта с первого измерительного пункта. Она показывает, насколько изменится расчетное значение XГО при изменении R1 на единицу;
- частная производная координаты XГО по дальности до объекта с первого измерительного пункта. Она показывает, насколько изменится расчетное значение XГО при изменении R1 на единицу;
Е[ε1], E[R1], E[ε2] - срединные ошибки измерений углов места и дальности до объекта с измерительных пунктов.
Аналитические зависимости для расчета срединных ошибок координат hГО и YГО имеют вид аналогичный (8)
По этой же причине частные производные, входящие в выражения (8)-(9), целесообразно определять по формулам численного дифференцирования по трем точкам

или по двум точкам

Другие частные производные, входящие в выражения (8) и (9),  целесообразно определять по аналогичным зависимостям.
целесообразно определять по аналогичным зависимостям.
Так как искомые координаты объекта зависят от одних и тех же величин arg, то по отношению друг к другу выходные параметры XГО; hГО; YГО будут являться зависимыми случайными величинами. Парный коэффициент корреляции KXY можно найти по формуле

Поскольку все аргументы являются некоррелированными, т.е.  , то второе слагаемое в последней формуле можно отбросить, тогда ковариационная матрица системы случайных величин (XГО; hГО; YГО) будет иметь вид
, то второе слагаемое в последней формуле можно отбросить, тогда ковариационная матрица системы случайных величин (XГО; hГО; YГО) будет иметь вид
Таким образом, предлагаемый способ определения положения объекта засечкой с двух измерительных пунктов по двум углам места и дальности, позволяет определять положение летательного аппарата дальномерно-пеленгационным способом организации измерений в оптическом и радиолокационном диапазонах электромагнитных волн при наличии минимально необходимой информации и оценивать его точность.
Источники информации
1. Панов В.П., Приходько В.В. Способ передачи и приема радиосигналов наземных радиомаяков. - М.: ФИПС. Патент на изобретение №2436232, 10.12.2011 г.
2. Безяев B.C. Способ триангуляции целей. - М.: ФИПС. Патент на изобретение №2423720, 10.07.2011 г.
3. Шишков С.В. Способ автоматизированного определения координат беспилотных летательных аппаратов. - М.: ФИПС. Патент на изобретение №2523446, 26.05.2014 г.
4. Шишков С.В. Способ определения координат летательных аппаратов на основе использования двух дирекционных углов и одного угла места. - М.: ФИПС Патент на изобретение №2601494, 20.04.2015 г.
Торпеда с водометным двигателем
Индуктивный датчик перемещения
Двойной интерференционный спектрометр
Маятниковая грузовая подвесная канатная дорога на мобильных опорах на железнодорожном участке
Электронно-цифровой прицел для 122-мм гаубицы д-30а
Способ измерения параметров движения снаряда на этапе внутренней баллистики
Способ снижения радиолокационной и оптико-визуальной заметности образцов ракетно-артиллерийского вооружения
Боеприпас с совмещением режимов обнаружения и поражения цели к подствольному гранатомету
Прибор анализа качества жидкости в поу
Прибор анализа качества жидкости в поу

