Результат интеллектуальной деятельности: Универсальный способ обмена навигационно-временной информацией в образцах военной техники Сухопутных войск
Вид РИД
Изобретение
Изобретение относится к военной технике, а именно к способам функционирования объектов военной техники, оснащенных навигационным оборудованием, в рамках автоматизированной системы управления войсками (АСУВ), и может быть использовано для решения задач топогеодезической подготовки боевых действий Сухопутных войск.
Известен способ информационного взаимодействия автономной аппаратуры топопривязки и навигации и бортовой ЭВМ, (см. патент RU №2510585 С2, H04L 29/00, 27.03.2014 г.), принятый за прототип. Способ информационного взаимодействия автономной аппаратуры топопривязки и навигации и бортовой ЭВМ включает в себя преобразование, передачу, прием измерительных и управляющих сигналов по проводным и беспроводным линиям связи согласно протоколу информационного взаимодействия. Протокол информационного взаимодействия обеспечивает работу автономной аппаратуры топопривязки и навигации (инерциальной навигационной системы) в следующих режимах: «ОЖИДАНИЕ», «ПОДГОТОВКА К РАБОТЕ», «ВЫСТАВКА», «НАВИГАЦИЯ», «ТЕСТ-КОНТРОЛЬ», для чего передача информации между бортовой ЭВМ и автономной аппаратурой топопривязки и навигации осуществляется двоичным цифровым последовательным кодом в асинхронном режиме по линии последовательного обмена стандарта EIA RS - 232С в соответствии с 3-проводным вариантом и импульсным периодическим сигналом метки времени, выдаваемым от бортовой ЭВМ в автономную аппаратуру топопривязки и навигации, по 2-проводной линии связи. Информационное взаимодействие осуществляется в соответствии со следующими перечнями параметров, для каждого из которых определен соответствующий тип данных: прием автономной аппаратурой топопривязки и навигации данных от бортовой ЭВМ-номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток, геометрический параметр, средняя квадратическая погрешность определения координат, высота барометрическая абсолютная, механическая линейная скорость объекта, доплеровская линейная скорость объекта, московское время суток на момент измерения скорости, слово признаков достоверности, командное слово, контрольная сумма, выдача данных из автономной аппаратуры топопривязки и навигации в бортовую ЭВМ-номер пакета данных, широта места объекта, долгота места объекта, высота места объекта, северная составляющая линейной скорости объекта, восточная составляющая линейной скорости объекта, вертикальная составляющая линейной скорости объекта, истинный курс объекта, крен объекта, тангаж объекта, московское время суток на момент измерения выдаваемых параметров, пройденное расстояние, слово состояния, режимное слово, контрольная сумма.
Недостатками способа, взятого за прототип, являются:
- недостаточный уровень унификации транспортного протокола информационно-временного взаимодействия для построения навигационно-информационных комплексов объектов СВ;
- недостаточный аппаратный (электрический и конструктивный) уровень унификации интерфейса;
- недостаточная унификация информационно-логического уровня;
- длительное время обработки информации и, соответственно, всего цикла боевого управления.
Предлагаемым изобретением решается задача по повышению эффективности использования автоматизированных навигационно-информационных комплексов объектов СВ.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании универсального способа обмена навигационно-временной информацией в образцах военной техники Сухопутных войск, обеспечивающего сопряжение (конструктивное, электрическое и логическое) управляющего бортового вычислителя объекта военной техники с навигационным оборудованием и получение от него навигационно-временной информации в требуемом представлении.
Указанный технический результат достигается тем, что в предлагаемом универсальном способе обмена навигационно-временной информацией в образцах военной техники Сухопутных войск, включающем в себя преобразование, передачу, прием измерительных и управляющих сигналов согласно протоколу информационного взаимодействия, обеспечивающего работу автономной аппаратуры топопривязки и навигации в нескольких режимах, в соответствии с перечнями параметров, для каждого из которых определен соответствующий тип данных: прием инерциальной навигационной системой данных от бортовой ЭВМ-номер пакета данных и навигационные параметры, выдача данных из инерциальной навигационной системы в бортовую ЭВМ-номер пакета данных и навигационные параметры, новым является то, что на первом этапе определяются основные группы аппаратуры и устройств, требующие обмена навигационно-временной информацией: автоматизированные рабочие места автоматизированной системы управления войсками, бортовые навигационно-измерительные комплексы, устройства и системы синхронизации шкал времени и решаемые ими задачи, на втором этапе определяются направления унификации способа обмена и свободные от унификации составляющие, на третьем этапе формируется структура кадров для получения навигационных данных от инерциальной навигационной системы, необходимых для аппаратуры спутниковой навигации, и регламентируется необходимых набор кадров, на четвертом этапе выполняется детальная покадровая разработка: кадр 1 - «Навигация ИНС», в котором передаются текущие измерения от инерциальной навигационной системы, расположенные в полях, каждое из которых соответствует одному параметру, вспомогательная информация, временная привязка текущих измерений относительно аппаратной метки времени, кадр 2 - «Дескриптор ИНС», в котором передаются серийный номер оборудования, количество полей, задействованных в кадре «Навигация ИНС» и дескрипторы этих полей, состоящие из идентификатора поля и служебной информации, описывающей навигационный параметр, кадр 3 - «Оцифровка МВ», в котором передаются в аппаратуру спутниковой навигации данные начальной временной и координатной привязки вместе с альманахами космических навигационных систем, кадр 4 - «Запрос НК», в котором передаются запросы необходимых сообщений из навигационного комплекса, содержащие идентификационный номер запрашиваемого кадра, а также слово вспомогательных флагов.
Определение на первом этапе основных групп аппаратуры и устройств, требующих обмена навигационно-временной информацией, и решаемых ими задач позволяет:
- определить объекты информационного сопряжения в автоматизированных информационно-временных комплексах;
- приступить к разработке протокола, обеспечивающего конструктивное, электрическое и логическое сопряжение вычислителя объекта с навигационным оборудованием.
Определение на втором этапе направлений унификации способа обмена и свободных от унификации составляющих позволяет:
- определить приоритетные направления для проведения унификации: транспортная часть, логику формирования кадров, типы кадров, вид представления информации, соответствие кадров типам потребителей;
- определить составляющие, не подлежащие унификации.
Формирование на третьем этапе структуры кадров для получения навигационных данных от инерциальной навигационной системы, необходимых для аппаратуры спутниковой навигации, и регламентирование необходимого набора кадров позволяет:
- ввести в состав кадра аппаратную метку времени, идентификационный номер, его размер;
- сформировать состав инерциальных данных.
Выполнение на четвертом этапе детальной покадровой разработки позволяет:
- систематизировать информационные потоки по назначению;
- определить периодичность и направление передачи.
Включение в набор кадров кадра 1 - «Навигация ИНС» позволяет:
- вести передачу данных текущих измерений от инерциального навигационного устройства;
- вести передачу временной привязки текущих измерений;
- определять темп передачи.
Включение в набор кадров кадра 2 - «Дескриптор ИНС» позволяет:
- раскрывать содержание передаваемой информации;
- передавать количественную информацию.
Включение в набор кадров кадра 3 - «Оцифровка МВ» позволяет:
- осуществлять начальную временную привязку аппаратуры спутниковой навигации;
- передавать альманахи космических навигационных систем.
Включение в набор кадров кадра 4 - «Запрос НК» позволяет:
- выполнять запрос необходимого сообщения;
- передавать слово вспомогательных флагов.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Способ обмена навигационно-временной информацией в образцах военной техники Сухопутных войск заключается в следующем.
Данный способ обмена навигационно-временной информацией направлен на решение задачи создания унифицированного протокола обмена навигационно-временной информацией (НВИ), необходимого для эффективного построения автоматизированных навигационно-информационных комплексов объектов СВ, использующих в своем составе навигационное оборудование различных производителей.
Основные группы аппаратуры и устройств, требующие обмена навигационной информацией:
1. Автоматизированные рабочие места (АРМ) систем автоматизированной системы управления войсками, которые решают задачи: определения сил и средств на поле, доставки корректирующей информации и другой специальной информации, организации инверсного дифференциального режима.
2. Бортовые навигационные комплексы, которые решают задачи: комплексирования навигационной информации от источников, основанных на различных физических принципах, снижения времени инициализации потребительской части аппаратуры спутниковой навигации (АСН), взаимный контроль работоспособности.
3. Устройства и системы синхронизации шкал времени.
При этом в способе (протоколе) необходимо унифицировать: транспортную часть, логику и приоритеты формирования кадров, типы кадров управления и данных, вид представления информации, соответствие кадров типам потребителей, тип интерфейса.
Тогда как остаются свободными от унификации (в зависимости от типа аппаратуры): степень (полнота) представления навигационной информации в том или ином кадре, способность (возможность) использования внешних данных, способность формировать только определенную часть типов кадров, способы использования внешних данных - например, корректирующей информации. В этом случае способ обеспечивает конструктивное, электрическое и логическое сопряжение бортового вычислителя объекта военной техники с навигационным оборудованием любого типа и получение от него необходимого набора НВИ в требуемом представлении. Получаемый набор данных может не исчерпывать всех возможностей оборудования, которые могут быть и более широкими. С другой стороны, если необходимые для функционирования информационного комплекса параметры данным оборудованием не формируются (или формируются в нестандартном представлении) сопряжение обеспечивает оперативное выявление этого обстоятельства с формированием перечня недостающих параметров.
Для повышения характеристик точности и помехоустойчивости приемников сигналов космических навигационных систем, а также для уменьшения времени поиска и захвата сигналов спутников в него необходимо передавать данные от инерциальной навигационной системы (ИНС).
Структура сообщений (кадров) для получения навигационных данных от ИНС, необходимых АСН определяется следующим образом. Основные опорные моменты следующие:
- способ обмена предполагает наличие общей аппаратной метки времени (MB) для временной синхронизации инерциальных и спутниковых наблюдений;
- ИНС является частью навигационного комплекса (НК), фактически, обмен данными происходит с этим НК;
- кадр имеет заголовок, в котором содержится идентификационный номер кадра и его размер в байтах;
- кадр содержит контрольную сумму, вычисленную по всем остальным байтам кадра;
- универсальность способа предполагает возможность формирования различного состава инерциальных данных, вследствие этого нельзя ввести четкой структуры сообщения с навигационными данными от инерциальной подсистемы, а можно ввести дополнительно сообщение «Дескриптор ИНС».
Набор кадров для информационной поддержки АСН от ИНС приведен в таблице 1.
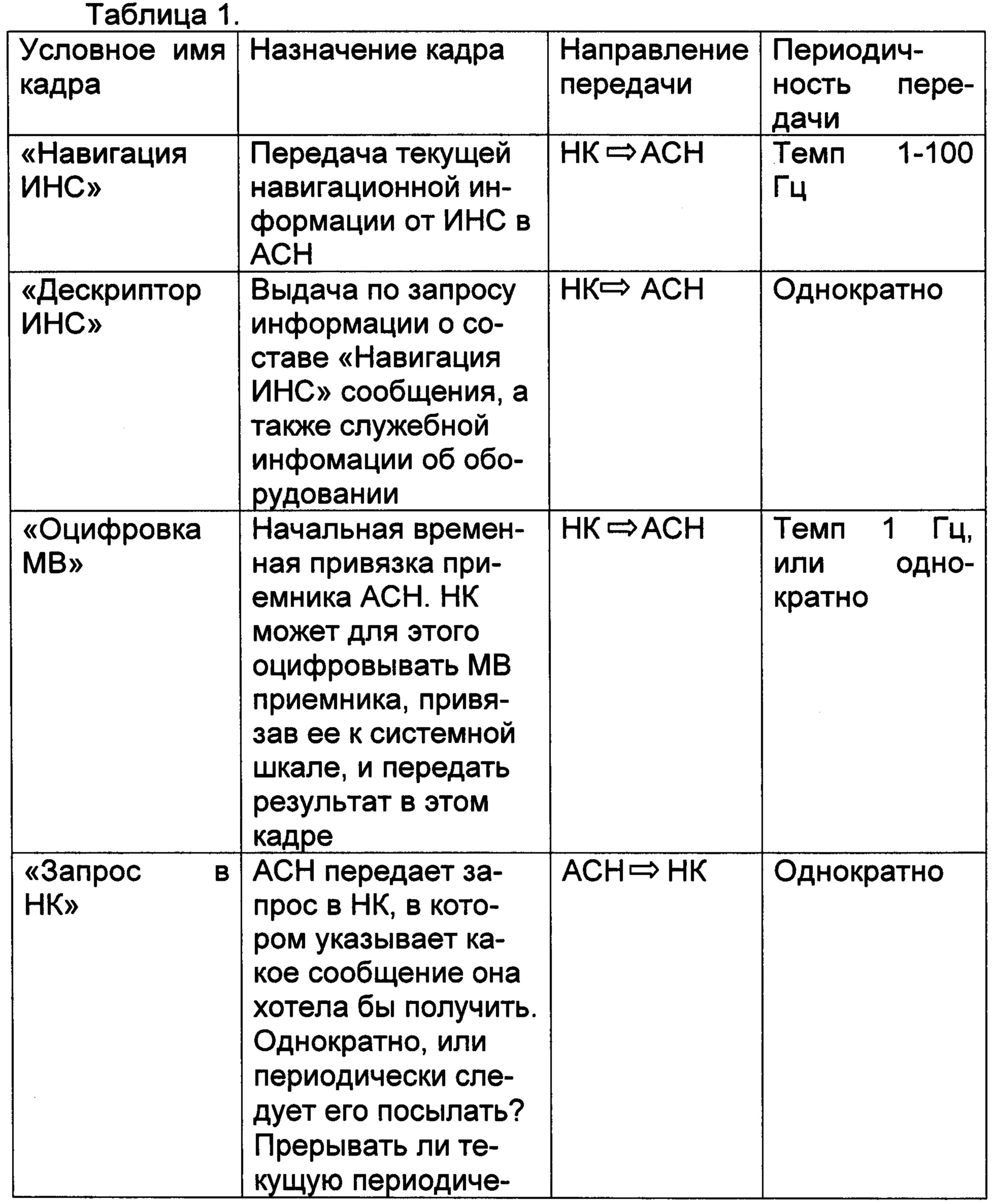

Кадр 1 - «Навигация ИНС»
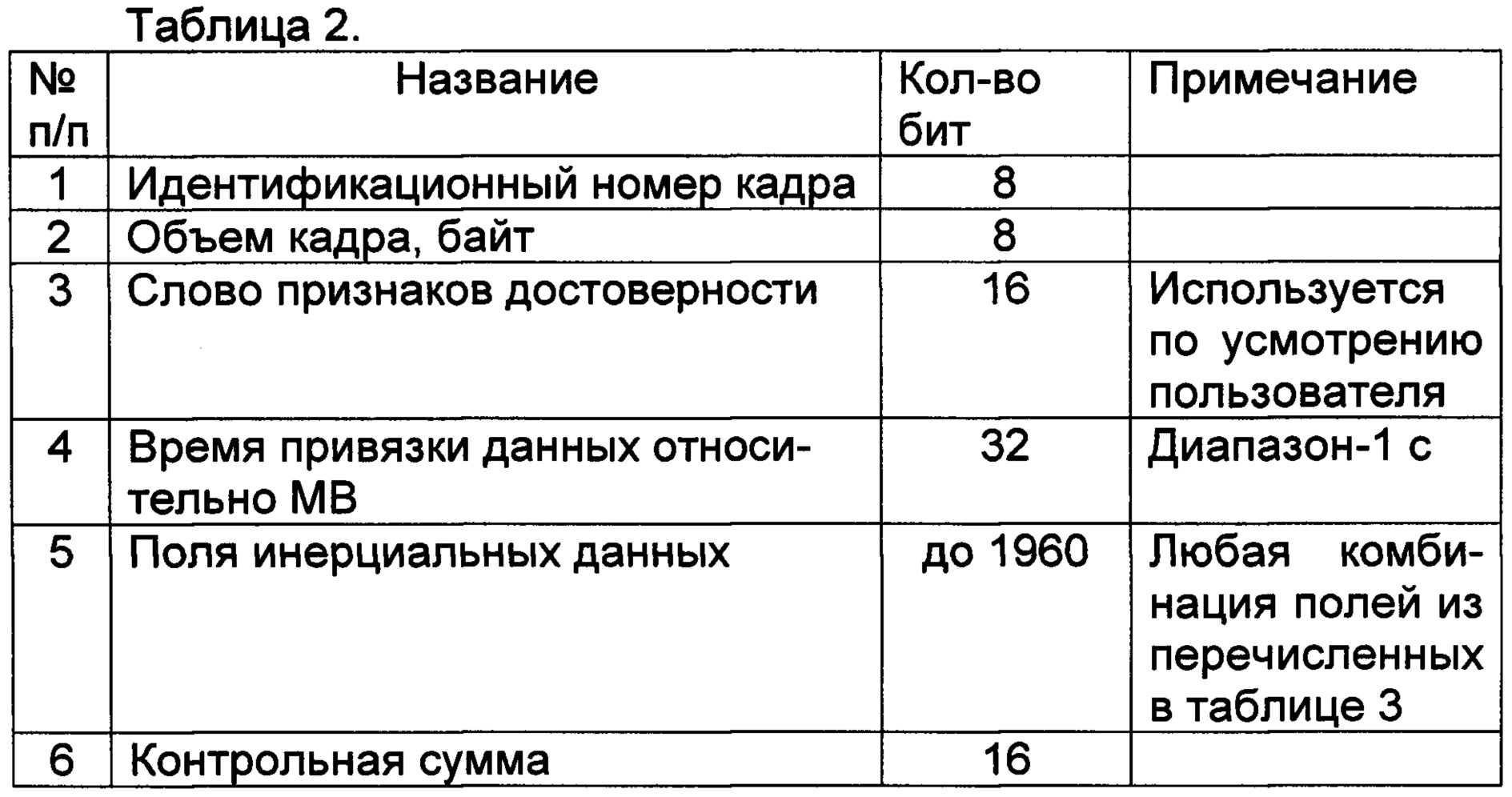
В этом кадре передаются текущие измерения от ИНС, а также вспомогательная информация, например, данные от системы определения высоты. В кадре передается также временная привязка текущих измерений относительно аппаратной MB. Инерциальные данные передаются в полях. Каждое поле соответствует какому-то одному параметру ИНС, например, угол крена. Перечень всех допустимых полей приведен в таблице 3. В каждой конкретной реализации способа используется только определенный набор полей. Набор и порядок передачи используемых полей определен в кадре «Дескриптор ИНС. Структура кадра «Навигация ИНС» приведена в таблице 2.
В таблице 3 приведен перечень возможных полей инерциальных данных, которые соответствуют параметрам ИНС. Обозначения X, Y, Z введены для различения базовых осей. Привязка данных к системе координат заложена в кадре «Дескриптор ИНС».
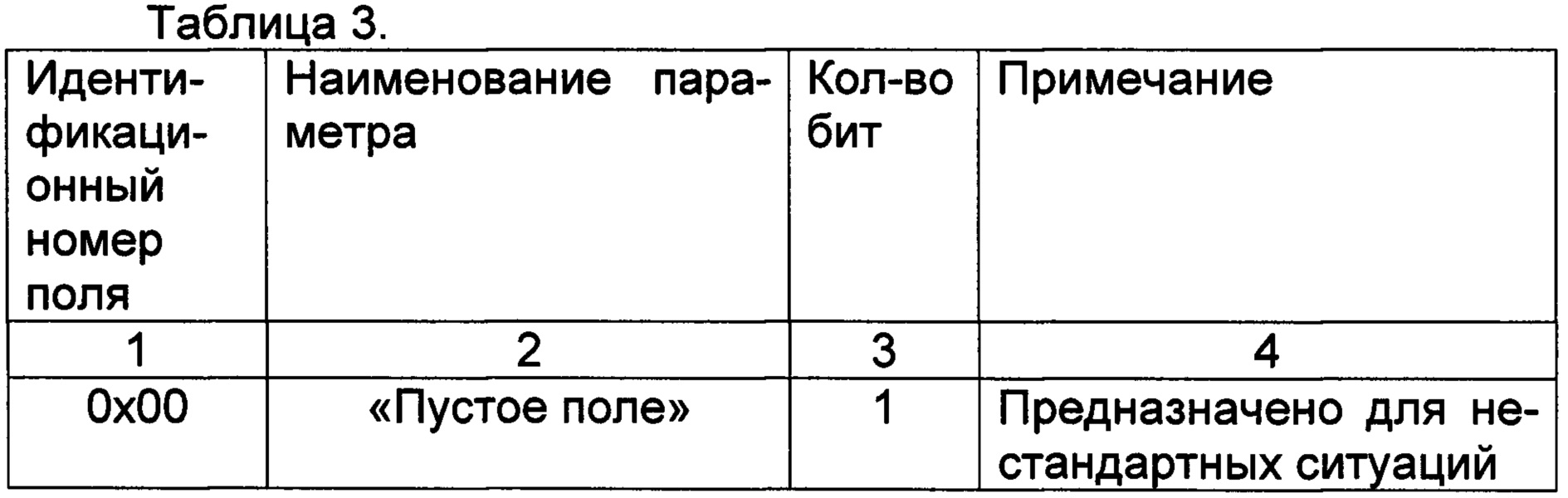
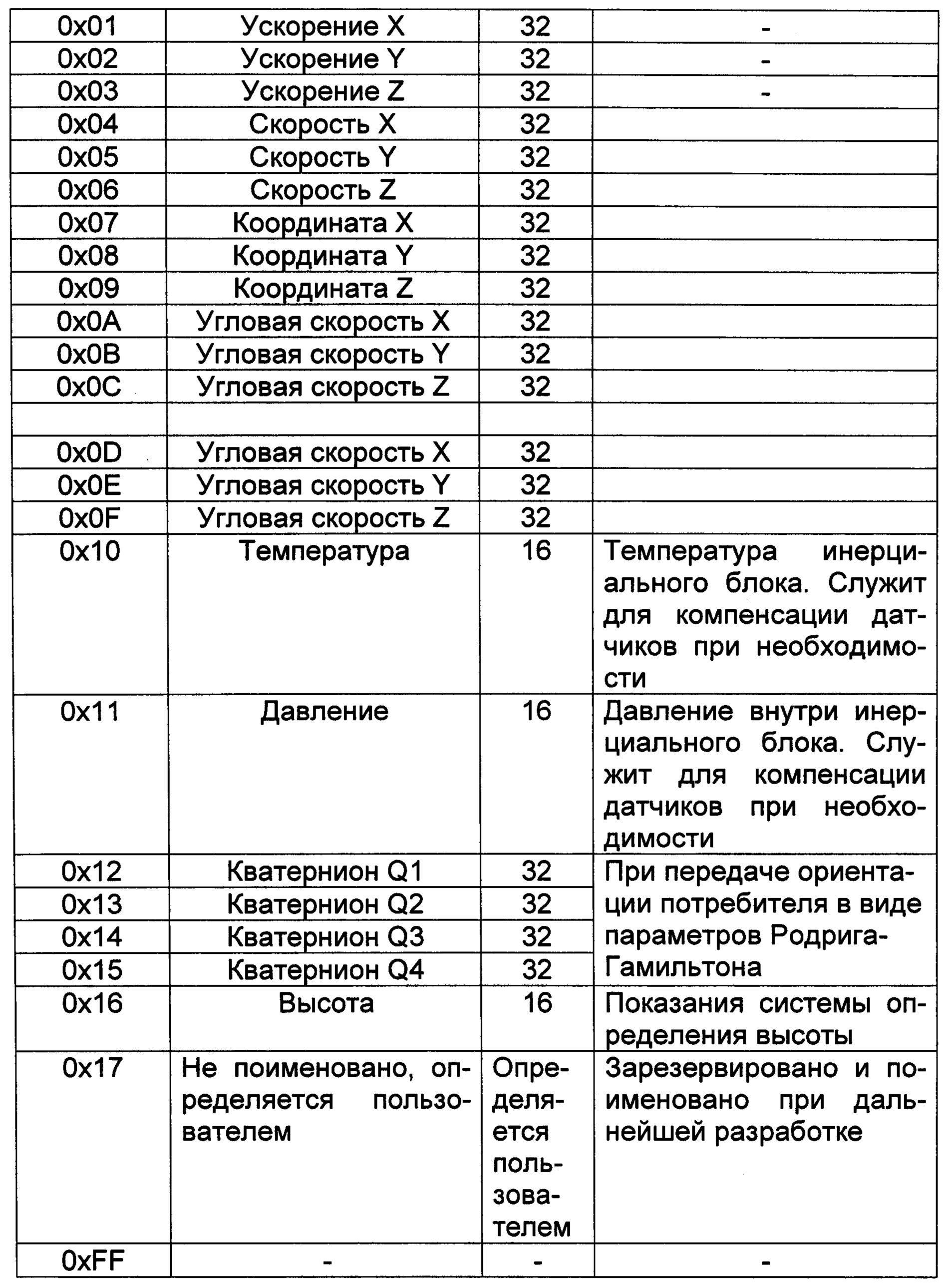
В таблице приведены поля, которые могут быть использованы различными потребителями. Реальный набор текущих навигационных параметров ИНС для конкретного потребителя существенно уже и определяется типом используемой инерциальной подсистемы.
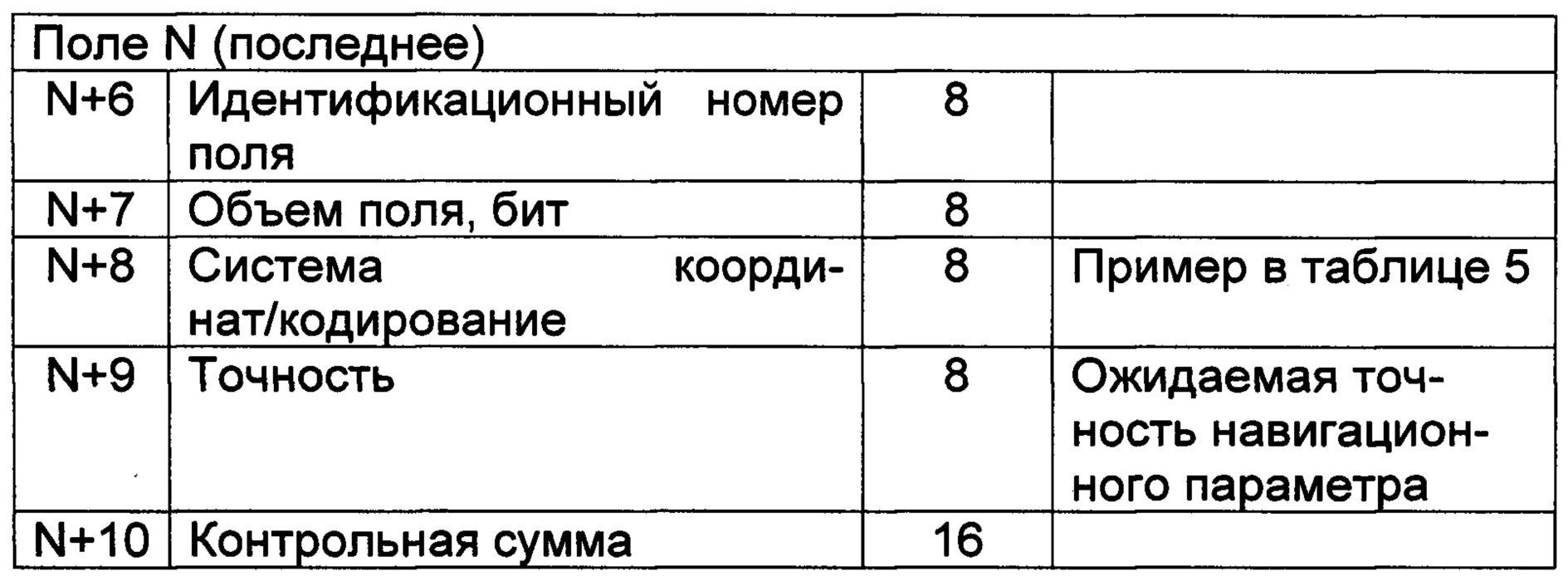
Кадр 2 - «Дескриптор ИНС»
Кадр «Дескриптор ИНС» служит для описания информации, передаваемой в кадре «Навигация ИНС». В кадре «Дескриптор ИНС» передается серийный номер оборудования, количество полей, задействованных в кадре «Навигация ИНС», и дескрипторы этих полей. Дескриптор поля состоит из идентификатора поля и служебной информации, описывающей навигационный параметр, передаваемый в поле. Дескрипторы полей передаются в том же порядке, в каком передаются поля в кадре «Навигация ИНС». Этот кадр предназначен для случаев, когда состав и характеристики передаваемых инерциальных данных меняются непредсказуемым образом. Структура кадра «Дескриптор ИНС» приведена в таблице 4.
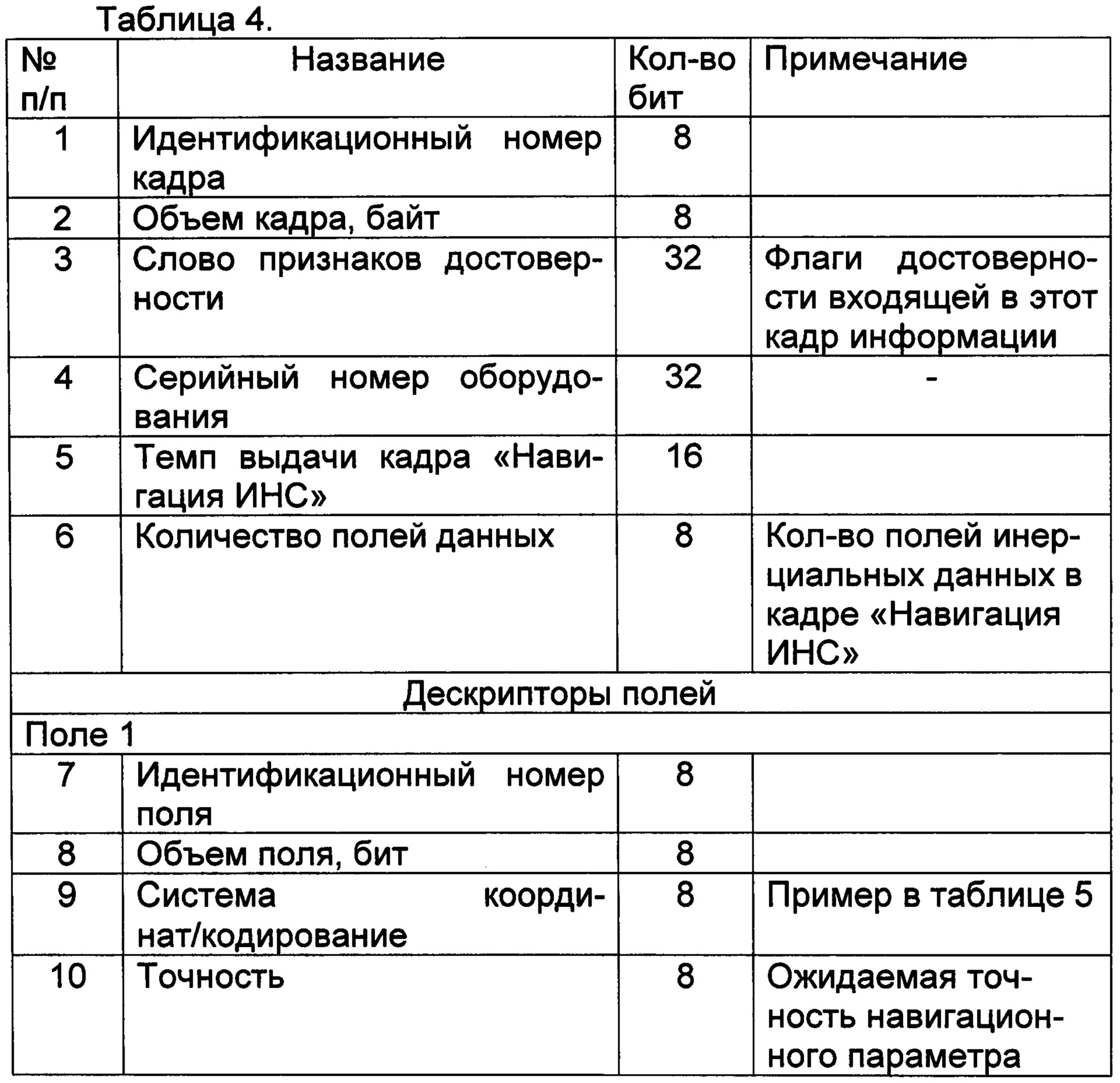
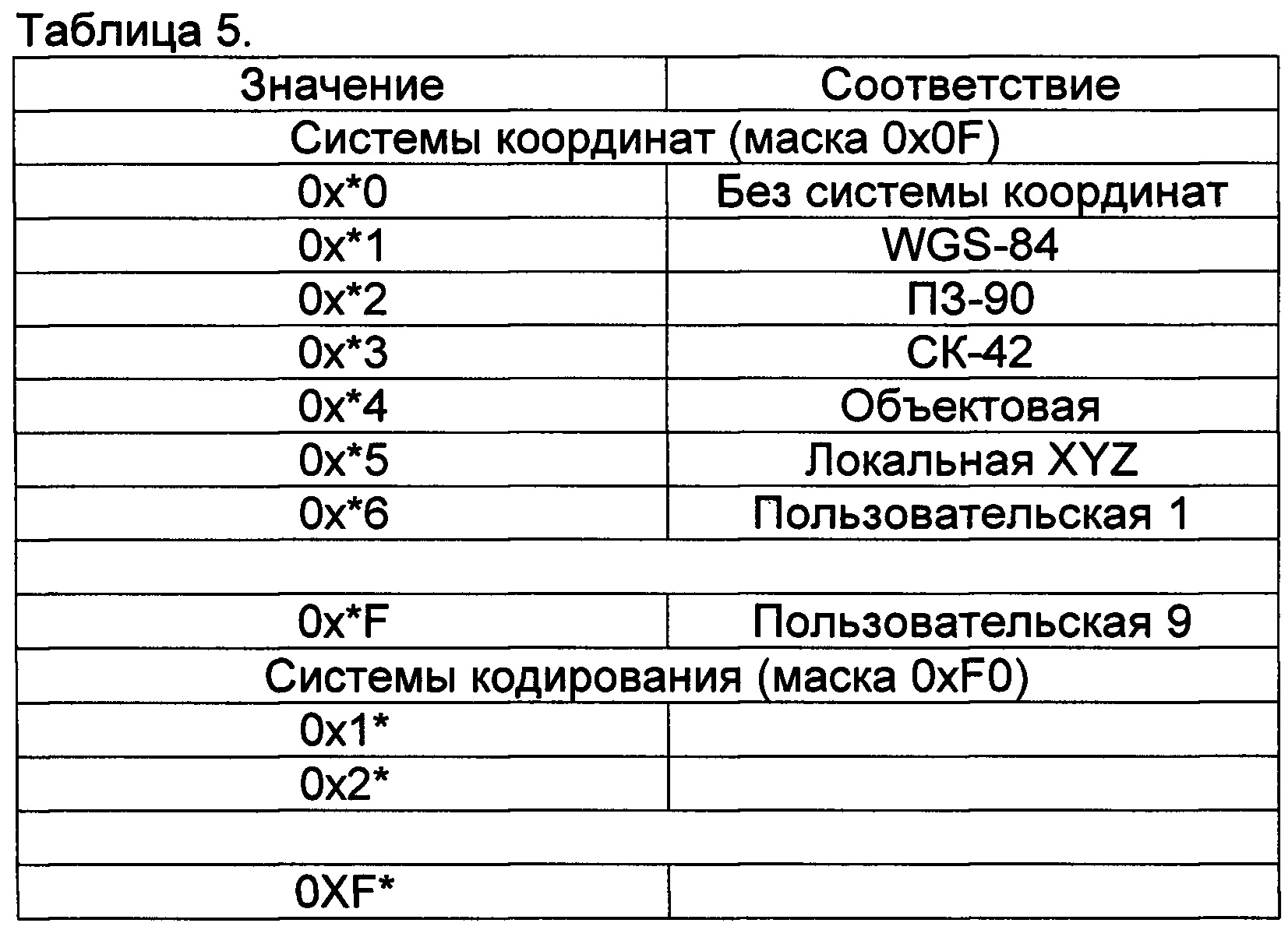
8-битное слово «Система координат/кодирование» в дескрипторе кадра стандартизовано отдельно. Например, содержимое этого слова можно определить согласно таблицы 5.
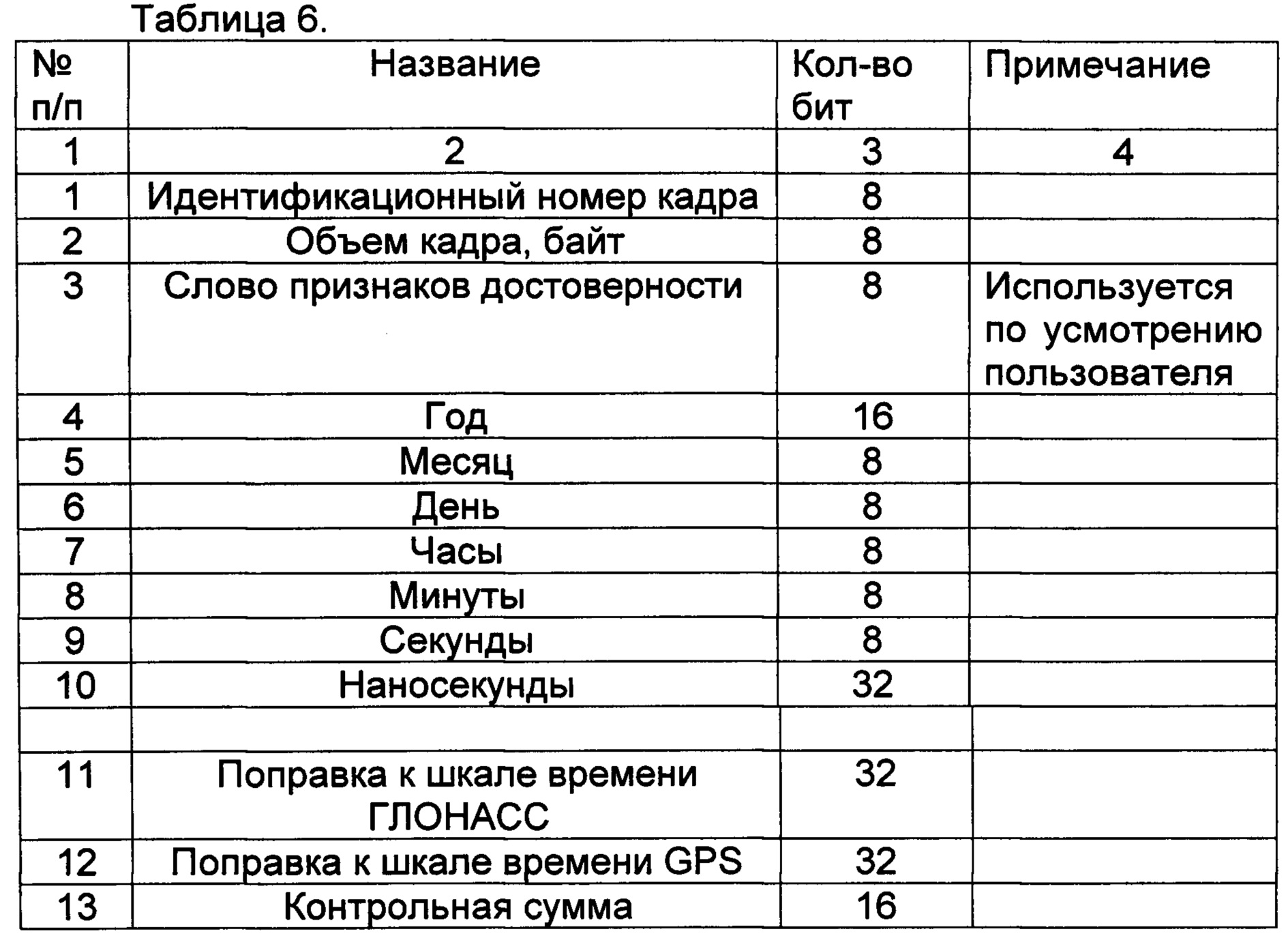
Кадр 3 - «Оцифровка МВ»
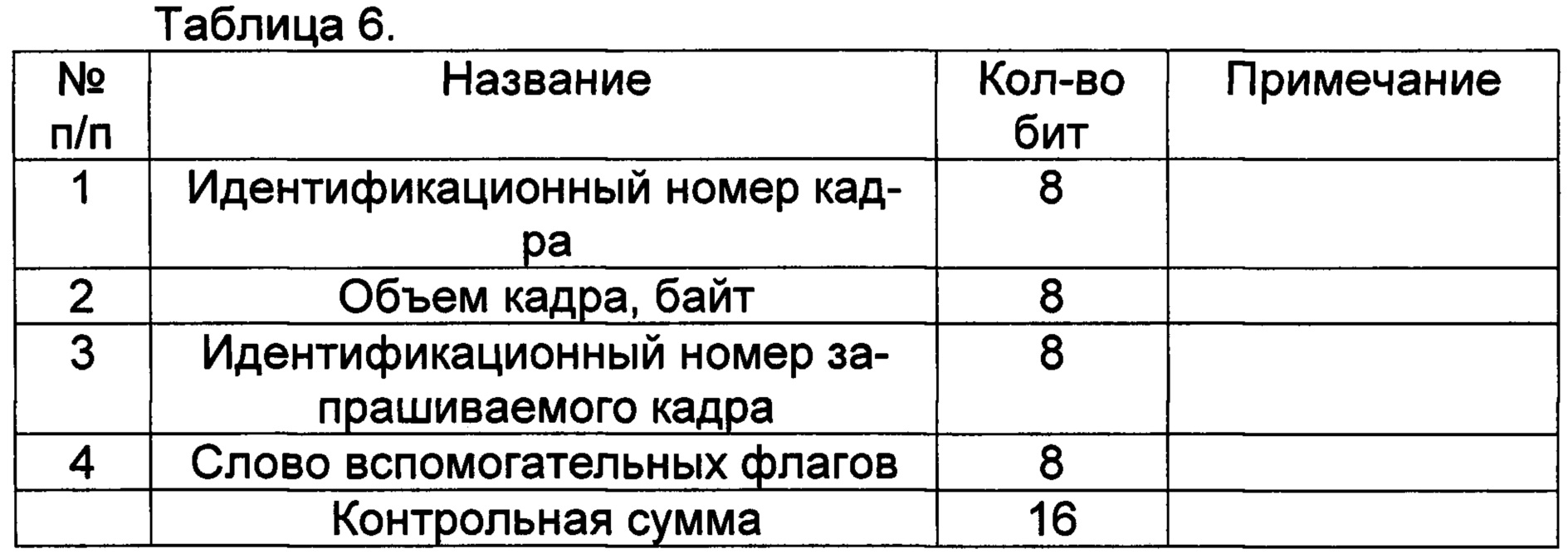
Кадр «Оцифровка МВ» служит для начальной временной привязки АСН с целью ускорения процедуры захвата спутников. Кадр передается в АСН вместе с альманахами космических навигационных систем и начальной координатной привязкой. НК определяет момент прихода МВ в глобальной шкале времени. Этот момент в виде даты, часов, минут, секунд и наносекунд передается в кадре Оцифровка МВ». Кадр «Оцифровка МВ» передается как однократно, так и периодически. Структура кадра «Оцифровка МВ» приведена в таблице 6.
Кадр 4 - «Запрос в НК»
Кадр 4 - «Запрос в НК» формируется в АСН и служит для запроса необходимых сообщений из НК. Этот кадр является общим и содержит идентификационный номер запрашиваемого кадра, а также слово вспомогательных флагов. В числе вспомогательных флагов должны присутствовать флаги «Периодическая выдача», «Прерывание текущей периодической выдачи». Структура кадра «Запрос в НК» приведена в таблице 6.
В информационном обмене можно выделить несколько уровней, к которым предъявляется требование унификации:
- аппаратный (электрический и конструктивный) уровень интерфейса;
- уровень транспортного протокола;
- информационно-логический уровень.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, обеспечивающего сопряжение (конструктивное, электрическое и логическое) управляющего бортового вычислителя объекта военной техники с навигационным оборудованием и получение от него навигационно-временной информации в требуемом представлении.
Способ обмена навигационно-временной информацией в образцах военной техники Сухопутных войск, включающий в себя преобразование, передачу, прием измерительных и управляющих сигналов согласно протоколу информационного взаимодействия, обеспечивающего работу автономной аппаратуры топопривязки и навигации в нескольких режимах, в соответствии с перечнями параметров, для каждого из которых определен соответствующий тип данных: прием инерциальной навигационной системой данных от бортовой ЭВМ - номер пакета данных и навигационные параметры, выдача данных из инерциальной навигационной системы в бортовую ЭВМ - номер пакета данных и навигационные параметры, отличающийся тем, что на первом этапе определяются основные группы аппаратуры и устройств, требующие обмена навигационно-временной информацией: автоматизированные рабочие места автоматизированной системы управления войсками, бортовые навигационно-измерительные комплексы, устройства и системы синхронизации шкал времени и решаемые ими задачи, на втором этапе определяются направления унификации способа обмена и свободные от унификации составляющие, на третьем этапе формируется структура кадров для получения навигационных данных от инерциальной навигационной системы, необходимых для аппаратуры спутниковой навигации, и регламентируется необходимый набор кадров, на четвертом этапе выполняется детальная покадровая разработка: кадр 1 - «Навигация ИНС», в котором передаются текущие измерения от инерциальной навигационной системы, расположенной в полях, каждое из которых соответствует одному параметру, вспомогательная информация, временная привязка текущих измерений относительно аппаратной метки времени, кадр 2 - «Дескриптор ИНС», в котором передаются серийный номер оборудования, количество полей, задействованных в кадре «Навигация ИНС» и дескрипторы этих полей, состоящие из идентификатора поля и служебной информации, описывающей навигационный параметр, кадр 3 - «Оцифровка МВ», в котором передаются в аппаратуру спутниковой навигации данные начальной временной и координатной привязки вместе с альманахами космических навигационных систем, кадр 4 - «Запрос НК», в котором передаются запросы необходимых сообщений из навигационного комплекса, содержащие идентификационный номер запрашиваемого кадра, а также слово вспомогательных флагов.Кронштейн
Стрелковое оружие для стрельбы с плеча с устройством для бесшумного ношения
Боевой роботизированный модуль
Оружейная установка
Мишенный комплекс с малоразмерными радиоуправляемыми мишенями
Информационно-вычислительная система дистанционно-управляемого подвижного объекта
Воздушная мишень
Многофункциональный робототехнический комплекс обеспечения боевых действий
Способ изготовления оболочек
Телескопический приклад
Система управления боевой роботизированной платформой
Способ информационного обмена с использованием программного обеспечения боевой роботизированной платформы
Способ организации беспроводного канала управления мобильным робототехническим комплексом и система связи и передачи данных
Окучник дисковый
Пушечное вооружение
Робототехнический комплекс разведки и огневой поддержки
Надульник стрелкового оружия
Способ проведения испытаний боевого дистанционно-управляемого модуля
Переводчик-предохранитель
Оружие

