Результат интеллектуальной деятельности: СПОСОБ ОРГАНИЗАЦИИ БЕСПРОВОДНОГО КАНАЛА УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ И СИСТЕМА СВЯЗИ И ПЕРЕДАЧИ ДАННЫХ
Вид РИД
Изобретение
Группа изобретений относится к дистанционно-управляемым мобильным роботизированным комплексам, в частности к способам и устройствам для организации беспроводных каналов связи между бортовым вычислительным комплексом, размещаемым на подвижной части подвижного объекта - шасси, и пунктом управления.
Известен способ организации работы распределенного информационно-управляющего комплекса подвижных объектов (см. патент RU №2232377 C1, G01C 23/00, B60C 15/00, G06F 19/00, 10.07.2004 г.), принятый за прототип. Способ включает организацию канала информационного обмена комплекса, оснащенного средствами приема и передачи информации, между системами комплекса, в том числе между системой опознавания образов, блоками обработки информации, датчиками и вычислительной системой комплекса.
Из того же источника известен распределенный информационно-управляющий комплекс подвижных объектов, взятый за прототип. Распределенный информационно-управляющий комплекс подвижных объектов содержит взаимосоединенные входами-выходами по магистрали информационного обмена систем радиотехнических средств навигации, обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, вычислительную систему комплекса, включающую взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, другой вход-выход которого является входом-выходом вычислительной системы комплекса. Комплекс дополнительно снабжен включенными в состав вычислительной системы комплекса блоком приведения информации, блоком синтеза параметров движения и состояния, блоком расчета параметров движений и деформаций, соединенных между собой и с блоком формирования параметров состояния, с блоком комплексной обработки информации, с блоком ввода-вывода и управления информационным обменом вычислительной системы по магистрали вычислительного информационного обмена.
Недостатками прототипа являются:
- большое количество периферийных устройств, приводящее к усложнению и увеличению количества аппаратных средств;
- низкая эффективность использования системы связи в зонах с наличием большого количества препятствующих факторов;
- высокая конфигуративная сложность системы;
- необходимость применения мощных вычислительных средств;
- недостаточная надежность и стабильность работы системы связи;
- низкая степень оптимизации технических характеристик канала связи, что не обеспечивает достаточного уровня качества передачи данных.
Предлагаемой группой изобретений решается задача по повышению эффективности и надежности роботизированных комплексов вооружений.
Технический результат, получаемый при осуществлении группы изобретений, заключается в создании способа организации беспроводного канала управления мобильным робототехническим комплексом и системы связи и передачи данных, обеспечивающих передачу команд управления и прием телеметрии, передачу видеоизображения, передачу служебной информации, обновление микропрограмм без усложнения алгоритма функционирования системы связи и передачи данных и применяемых технических средств при обеспечении высокой степени надежности и стабильности канала связи.
Указанный технический результат достигается тем, что в предлагаемом способе организации беспроводного канала управления мобильным робототехническим комплексом, включающем организацию канала информационного обмена комплекса, оснащенного средствами приема и передачи информации, между системами комплекса, в том числе между системой опознавания образов, блоками обработки информации, датчиками и вычислительной системой комплекса, новым является то, что на первоначальном этапе для организации беспроводного канала управления мобильного робототехнического комплекса производится оценка и определение необходимой пропускной способности (скорости соединения) канала для передачи команд управления и телеметрии, на втором этапе проводится оценка и определение необходимой пропускной способности (скорости соединения) канала для передачи видеоинформации с учетом анализа качества распознаваемости объектов различной конфигурации на передаваемой видеоинформации, на третьем этапе проводится сравнительный анализ форматов сжатия и передачи видеоданных, выбор режимов исходного изображения и общей структуры подсистемы связи, на четвертом этапе проводится анализ характеристик частотных диапазонов и выбор наиболее подходящего для применения в составе МРК диапазона частот, исходя из возможности обеспечения связи на расстояние (2-3) км и технических характеристик необходимого оборудования, на пятом этапе формируется структура системы связи и передачи данных, основанная на смешанном (комплексном) методе передачи информации в аналоговом и цифровом виде.
Этот способ организации беспроводного канала управления мобильным робототехническим комплексом реализуется в предлагаемой системе связи и передачи данных, содержащей канал информационного обмена, блоки обработки информации, средства приема и передачи информации, вычислительную систему, в которой новым является то, что в системе связи и передачи данных для передачи при смешанном (комплексном) способе передачи информации задействованы: видеокамеры, связанные с матричным видеокоммутатором, блок аналогового шифрования, связанный с передатчиком видеосигнала, бортовой компьютер, радиомодем данных, установленные на подвижной части мобильного роботизированного комплекса, для приема данных при смешанном (комплексном) способе задействованы: приемник видеосигнала, связанный с блоком аналогового декодирования, компьютер пункта управления, блок видеозахвата, радиомодем данных.
В системе связи и передачи данных могут быть задействованы направленные антенны приема и передачи со стороны пункта управления и на подвижной части мобильного робототехнического комплекса.
Оценка и выбор необходимой пропускной способности (скорости соединения) канала для передачи команд управления и телеметрии позволяет определить оптимальную производительность по переданной информации канала связи исходя из объема задач по назначению.
Оценка и выбор необходимой пропускной способности (скорости соединения) канала для передачи видеоинформации с учетом анализа качества распознаваемости объектов различной конфигурации на передаваемой видеоинформации позволяет обеспечивать качество изображения, достаточное для решения задач по распознаванию объектов различной конфигурации и размера.
Проведение сравнительного анализа форматов сжатия, выбора режимов исходного изображения и общей структуры подсистемы связи позволяет определить оптимальный тип формата сжатия, степень сжатия и стойкость к нарушению к видеоизображения.
Проведение анализа характеристик частотных диапазонов и выбор наиболее подходящего для применения в составе МРК диапазона частот позволяет обеспечить надежную связь в различных условия при сохранении приемлемой мощности передатчика и оптимальной конструкции антенны.
Формирование структуры системы связи и передачи данных, основанной на смешанном (комплексном) методе передачи информации в аналоговом и цифровом виде, позволяет обеспечить устойчивую радиосвязь при относительной схемной простоте.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
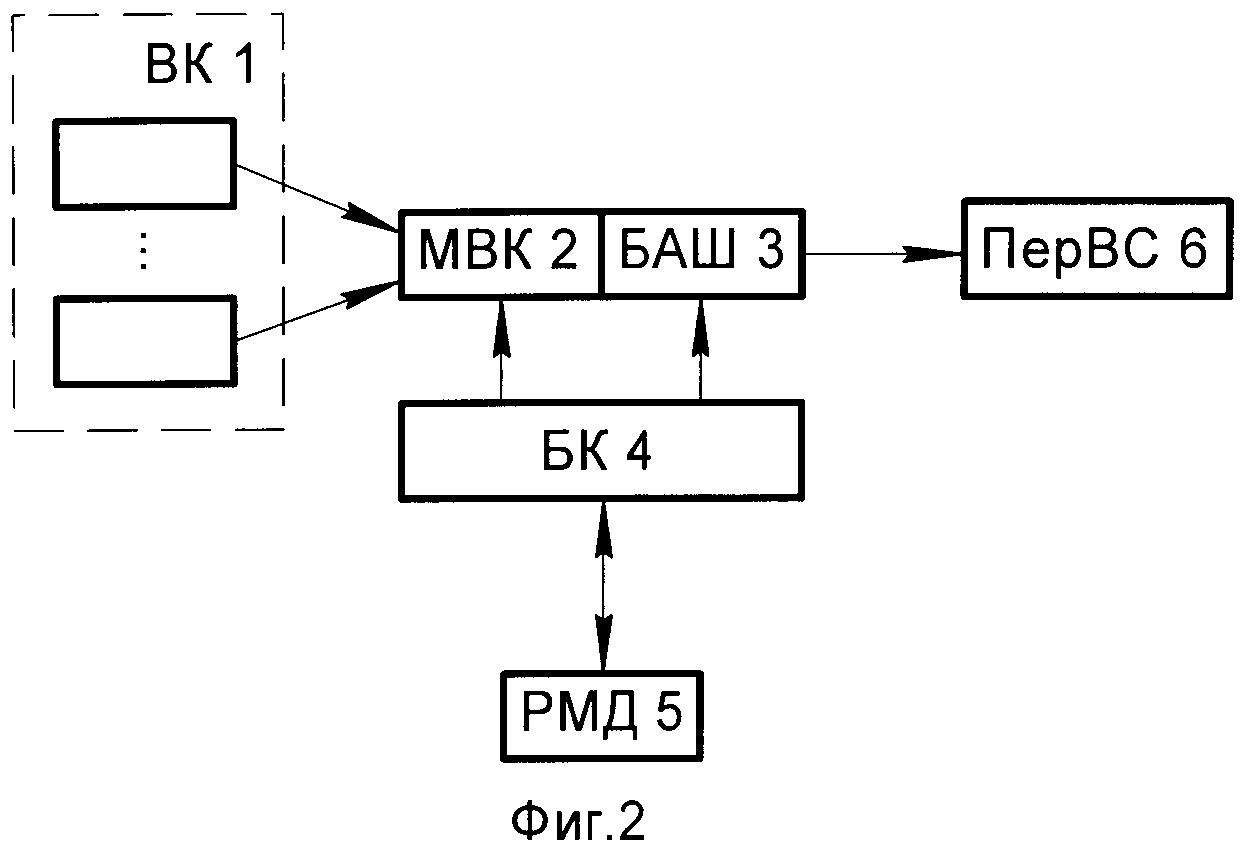
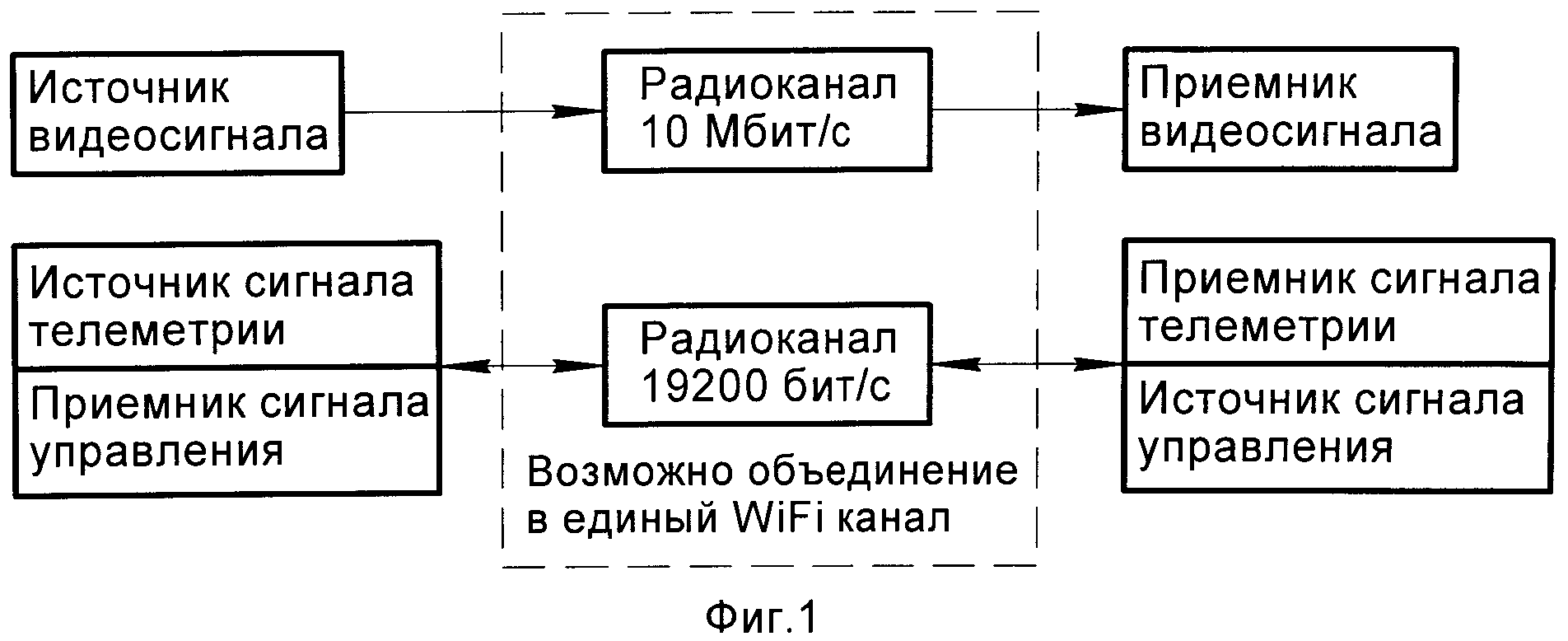
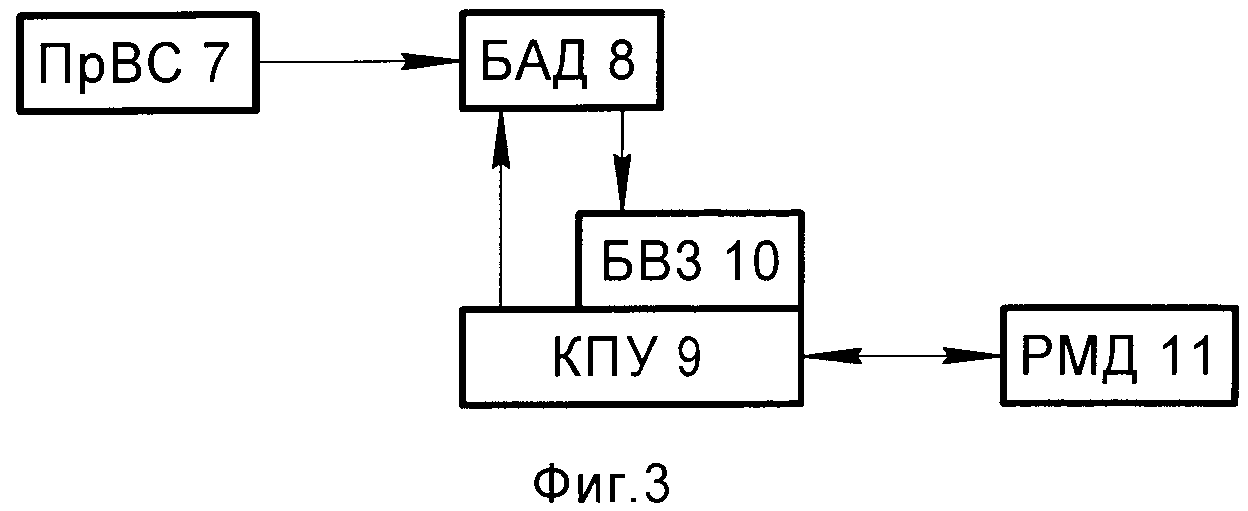
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема подсистемы связи, на фиг. 2 - структурная схема передачи видеосигнала с подвижной части мобильного робототехнического комплекса при смешанной передаче данных, на фиг. 3 - структурная схема приема видеосигнала на пункте управления при смешанной передаче данных.
Система связи и передачи данных для передачи при смешанном (комплексном) способе передачи видеоинформации состоит из передающей части, размещенной на подвижной части мобильного роботизированного комплекса (МРК), и принимающей части, размещенной на пункте управления (ПУ).
Передающая часть содержит видеокамеры (ВК) 1, связанные с матричным видеокоммутатором (МВК) 2, блок аналогового шифрования (БАШ) 3, бортовой компьютер (БК) 4, радиомодем данных (РМД) 5. БАШ 3 связан с передатчиком видеосигнала (ПерВС) 6.
Принимающая часть содержит приемник видеосигнала (ПрВС) 7, связанный с блоком аналогового декодирования (БАД) 8, компьютер пункта управления (КПУ) 9, блок видеозахвата (БВЗ) 10, радиомодем данных (РМД) 11.
В системе связи и передачи данных могут быть задействованы направленные антенны приема и передачи (на чертежах не показаны) со стороны ПУ и на подвижной части МРК.
Способ организации беспроводного канала управления мобильным робототехническим комплексом реализуется следующим образом.
Система управления мобильным робототехническим комплексом (МРК) может быть условно разделена на два модуля:
- бортовой вычислительный комплекс - совокупность программно-аппаратных средств, решающая задачу управления МРК и размещаемая на подвижной части - шасси;
- пульт оператора - совокупность программно-аппаратных средств, размещаемая на машине управления, либо на внешнем пульте.
Канал связи между указанными модулями должен обеспечивать следующий набор функций:
- передача команд управления и прием телеметрии;
- передача видеоизображения;
- передача служебной информации, обновление микропрограмм.
Этап оценки и определения необходимой пропускной способности (скорости соединения) канала для передачи команд управления и телеметрии
Передача команд управления и прием телеметрии производится последовательным байт ориентированным протоколом, асинхронно. Тогда объем одной посылки составляет 100·8=800 бит. Зависимость времени передачи от скорости приведена в таблице 1.
|
Отсюда можно сделать вывод, что с превышением скорости соединения выше 19200 бит/с не происходит значительного роста скорости или производительности по переданной информации канала связи.
Следовательно, для удовлетворительной работы системы управления при правильной организации протокола обмена, прежде всего на логическом уровне нет необходимости в существенном увеличении скорости соединения.
Оценка и определение необходимой пропускной способности (скорости соединения) канала для передачи видеоинформации
Видеоизображение передается в цифровом виде. Скорость смены кадров стандартная - 25 кадров/с. Изображение полноцветное. Разрешение оптической системы камеры должно быть не хуже 520 ТВЛ по стандартной таблице контроля разрешения.
Зависимость объема информации от размера кадра (без сжатия) приведен в таблице 2.
|
Зависимость распознавания объектов на расстоянии 10 метров от видеокамер от размера кадра приведена в таблице 3.
|
Из таблицы 3 следует, что наиболее целесообразным является настройка видеокамер, применяемых на МРК, на размер кадра не менее 800×600 точек, что обеспечивает качество изображения, достаточное для большинства задач.
Этап сравнительного анализа форматов сжатия и передачи видеоданных, выбора режимов исходного изображения и структуры подсистемы связи
Рассмотрим наиболее распространенные форматы сжатия и передачи видеоданных.
Motion JPEG
Motion JPEG или М-JPEG - цифровой видеоряд, состоящий из последовательности отдельных изображений JPEG. Отображение 16 или более кадров в секунду воспринимается зрительно как видеоизображение. Отображение 30 (NTSC) или 25 (PAL) кадров в секунду воспринимается как полномасштабное видео.
Одно из преимуществ Motion JPEG заключается в том, что каждому кадру в последовательности гарантируется качество, получаемое на уровне сжатия, выбранном для камеры или видеокодера.
Отсутствие взаимосвязи между кадрами в Motion JPEG гарантирует высокую надежность этого формата, то есть потеря одного кадра во время передачи не повлияет на качество остального видеоряда.
MPEG-4
Формат MPEG-4 соответствует стандарту MPEG-4 Part 2, который также известен MPEG-4 Visual.
MPEG-4 используется в приложениях, требующих высокого качества изображения, фактически неограниченную пропускную способность и отсутствие ограничений по частоте кадров.
Н.264 или MPEG-4 Part 10/AVC
Н.264 или MPEG-4 Part 10/AVC - современный стандарт кодирования видеосигналов. Как ожидается, стандарт Н.264 станет в ближайшие годы самым востребованным видеостандартом. Кодер Н.264 без ущерба для качества изображения может снижать размер файла цифрового видео более чем на 80% по сравнению с форматом Motion JPEG и на 50% - по сравнению со стандартом MPEG-4, что означает гораздо меньшие требования к полосе пропускания для передачи и объему памяти для хранения видеофайла. Или же, с другой стороны, возможность получения гораздо лучшего качества видеоизображения при той же скорости передачи данных.
Сравнительный анализ форматов сжатия приведен в таблице 4.
|
|
Таким образом, для передачи видеоизображения наиболее целесообразны следующие режимы передачи исходного изображения: размер кадра не менее 800×600 точек, сжатие MPEG-4. Скорость передачи данных должна быть не хуже 10 Мбит/с.
С учетом выше изложенного определяется общая структурная схема подсистемы связи.
Этап анализа характеристик частотных диапазонов и выбор наиболее подходящего для применения в составе МРК диапазона частот
Для передачи видеоинформации цифровой канал связи должен иметь высокое быстродействие и помехозащищенность. В настоящий момент доминирующей технологией является технология передачи цифровых данных WiFi.
Вне зависимости от частоты WiFi устройства, неработоспособности при отсутствии прямой видимости «приемник - передатчик» повышение выходной мощности сигнала не приводит к существенному повышению дальности связи.
В городских условиях возможно установление из-за случайных переотражений сигнала от конструкций зданий и сооружений, но гарантировать устойчивость канала не представляется возможным.
Вне городских условий, на открытой равнинной местности, WiFi устройства работают достаточно надежно при условии, что антенны размещены на высоте, превышающей высоту кустарника и складок местности.
Вне городских условий, в лесистой местности, WiFi устройства непригодны для надежной связи. По разным источникам один метр кроны ослабляет сигнал от 4 до 8 дБ. Кроны деревьев оказывают большее влияние на ослабление и рассеивание сигнала, чем стволы. При необходимости обеспечения связи по WiFi при условии наличия отдельных деревьев целесообразно устанавливать антенны ниже уровня крон деревьев.
Сравнительные характеристики частотных диапазонов приведены в таблице 5.
|
Из таблицы 5 следует, что наиболее подходящим для применения в составе МРК является диапазон дециметровых волн. В этом диапазоне сохраняется приемлемая мощность передатчика, и в то же время, при работе в данном диапазоне практически пропадают проблемы обеспечения связи в условиях города и открытой местности, а также леса, на дальностях до (2-3) км.
Этап формирования структуры системы связи и передачи данных, основанной на смешанном (комплексном) методе передачи информации в аналоговом и цифровом виде
В то же время, становится невозможна передача видеосигнала в цифровом виде, однако хорошо отработанными являются схемы передачи видеосигнала в аналоговом виде, а также существуют радиомодемы для низкоскоростной последовательной передачи данных (смешанный или комплексный способ передачи данных).
В схеме передачи данных при смешанном способе: ВК 1 - источники аналогового видеосигнала в формате Composite Video или HS, МВК 2 - интегральная микросхема, обеспечивающая согласование уровней сигналов ВК 1, формирование сигналов строчной и кадровой развертки и подающая сигналы на вход БАШ 3. Основная задача МВК 2 - выборка активной в текущий момент ВК 1 по команде БК 4 и подача сигнала для дальнейшей передачи. БАШ 3 - обеспечивает защиту сигнала от декодирования при перехвате радиоканала. Защита обеспечивается путем смещения уровней сигнала от стандартных уровней Composite Video и изменением задержек в сигналах строчной и кадровой развертки. ПерВС 6 передает кодированный аналоговый сигнал в эфир.
В схеме приема данных при смешанном способе: ПрВС 7 осуществляет прием закодированного видеосигнала и передачу низкочастотного видеосигнала на вход БАД 8. БАД 8 восстанавливает уровни видеосигнала до стандартных сигнала Composite Video, восстанавливает сигналы синхронизации строчной и кадровой развертки, передает сигнал на блок БВЗ 10. БВЗ 10 осуществляет преобразование аналогового сигнала в цифровой для дальнейшей обработки и визуализации на КПУ 9.
Из вышеизложенного следует, что наиболее надежным является радиоканал, выполненный по смешанной схеме с аналоговой передачей видеосигнала и цифровой передачей команд управления и телеметрии, работающий в диапазоне дециметровых волн.
Использование направленных антенн приема и передачи со стороны пункта управления и на подвижной части МРК
Для повышения надежности и стабильности канала связи возможно использование направленных антенн для размещения на пункте управления и подвижной части МРК.
Данное техническое решение позволяет значительно повысить скрытность работы МРК, а также обеспечить решение задачи навигации, т.к. антенна пункта управления является реперной точкой и всегда известна ориентация - пеленг на антенну пункта управления и угол поворота антенны передатчика относительно корпуса подвижной части МРК. В комплексе с данными одометрии и автономной системы навигации этих данных достаточно для решения задачи топопривязки МРК.
Таким образом, в предлагаемой группе изобретений решена задача по достижению технического результата, заключающегося в создании способа организации беспроводного канала управления мобильным робототехническим комплексом и системы связи и передачи данных, обеспечивающих передачу команд управления и прием телеметрии, передачу видеоизображения, передачу служебной информации, обновление микропрограмм без усложнения алгоритма функционирования системы связи и передачи данных и применяемых технических средств при обеспечении высокой степени надежности и стабильности канала связи.
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы

