Результат интеллектуальной деятельности: Способ проверки зенитных ракет и пусковых установок
Вид РИД
Изобретение
Изобретение относится к оборонной технике и, в частности, к комплексным средствам контроля электрических параметров управляемых зенитных ракет и пусковых устройств.
Известен способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления (см. патент RU №2475696 С1, F42B 35/00, 20.02.2013 г.). Способ контроля электрических параметров системы вооружений принят за прототип. Проверку электрических параметров контролируемого изделия по данному способу осуществляют посредством электрического подсоединения устройства для проверки к электрической системе контролируемого изделия при помощи электроразъема, установленного на контролируемом изделии и предназначенного для проверки его электрической системы. Перед контролем электрических параметров электрической системы контролируемого изделия блоки устройства для проверки соединяются по схеме с подключением к эквиваленту контролируемого изделия. Далее осуществляется режим самоконтроля (самотестирования) устройства для проверки. После завершения режима самоконтроля и получения положительного результата блоки устройства для проверки соединяются по схеме с подключением реально контролируемого изделия, и производится автоматизированный режим контроля параметров электрической системы контролируемого изделия. При этом оба режима контроля обеспечиваются программой с заданными стимулирующими (управляющими) сигналами, прохождение программ контроля сопровождается выводом визуальной информации на индикаторы, а все остановки сопровождаются звуковыми сигналами. По окончании контроля контролируемых изделий устройство для проверки может быть переведено в режим контроля времени наработки устройства для проверки.
Недостатками прототипа являются:
- недостаточные возможности мобильного перебазирования;
- недостаточная функциональная оснащенность подвижного контрольного пункта;
- недостаточные возможности по хранению, отображению информации и поддержанию информационного обмена между объектом контроля и проверочной аппаратурой;
- недостаточная технологичность проведения контроля;
- недостаточная производительность процесса контроля.
Предлагаемым изобретением решается задача по повышению эффективности проведения технического обслуживания и регламентных проверок зенитных ракет и пусковых установок.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа функционирования подвижного контрольного пункта, обеспечивающего автоматизированную, количественную оценку нахождения значений параметров изделия в заданных пределах, индикацию окончания процесса проверки с констатацией ее результата и возможностью просмотра полученных значений параметров на экране ПЭВМ.
Указанный технический результат достигается тем, что в предлагаемом способе проверки зенитных ракет и пусковых установок, заключающемся в том, что перед контролем электрических параметров блоки устройства для проверки соединяются по соответствующей схеме, потом осуществляется режим самоконтроля устройства для проверки, после получения положительного результата блоки устройства для проверки соединяются по схеме с подключением реально контролируемого изделия и производится автоматизированный режим контроля параметров электрической системы контролируемого изделия, осуществляется вывод визуальной информации о результатах проверки, новым является то, что после выполнения подготовки к техническому обслуживанию боевых средств ракетного комплекса - ракеты и механизма пускового (ПМ), сборки схемы соединения при проведении самоконтроля КПА (режим «01»), установки ПЭВМ в рабочее положение, загрузки операционной системы, запуска программы функционирования КПА, выбора режима проверки 1 - «Самоконтроль КПА», запуска процесса проверки, который сопровождается отображением последовательности проверки с индикацией номера, наименования контролируемого параметра и результата его измерения, получение звукового сигнала и отображения на экране строки о необходимости выполнения ручной операции №1, с помощью переговорного устройства сообщение оператору на внешнем рабочем месте о необходимости выполнения ручной операции №1, после получения старшим оператором сообщения о результатах выполнения ручной операции №1 продолжение процесса проверки, в конце проверки получение звукового сигнала и отображением на экране результата проверки «ГОДЕН», выполняется проверка функционирования МП ракетного комплекса: сборка схемы соединения при проведении контроля МП (режим «02»), установка ПЭВМ в рабочее положение, загрузка операционной системы, запуск программы функционирования КПА, присоединение проверяемого ПМ к соединителям, выбор режима проверки 2 - «Контроль МП», запуск процесса проверки, которая сопровождается отображением последовательности проверки с индикацией номера, наименования контролируемого параметра и результата измерения его проверки, получение звуковых сигналов и отображений на экране строки о необходимости выполнения ряда ручных операций №2-№8, с помощью переговорного устройства сообщение оператору на внешнем рабочем месте о необходимости выполнения ручных операций №2…№8, после получения старшим оператором сообщения о результатах выполнения последней ручной операции продолжение процесса проверки, получение в конце проверки звукового сигнала и отображение на экране результата проверки «ГОДЕН», во время проверки периодическое прослушивание наличия звука в телефоне проверяемого МП, выполняется проверка функционирования ракеты ракетного комплекса: сборка схемы соединения при проведении контроля ракеты (режим «03»), установка ПЭВМ в рабочее положение, загрузка операционной системы, запуск программы функционирования КПА, установка ракеты и имитатора цели, присоединение проверяемой ракеты к соединителям, выбор режима проверки 3 - «Контроль ракеты», запуск процесса проверки, которая сопровождается отображением процесса проверки с индикацией номера, наименования контролируемого параметра и результата его проверки, получение звукового сигнала и отображение на экране строки о необходимости выполнения ручной операции №9, с помощью переговорного устройства сообщение оператору на внешнем рабочем месте о необходимости выполнения ручной операции №9, после получения старшим оператором сообщения о результатах выполнения ручной операции продолжение процесса проверки, получение в конце проверки звукового сигнала и отображение на экране результата проверки «ГОДЕН», во время проверки прослушивание наличия звука вращающегося ротора гироскопа, работы рулей проверяемой ракеты, свечения индикаторов при проведении ручной операции №9, получение результата «ОТКАЗ» при любом виде поверок свидетельствует о неисправности проверяемого изделия, после завершения проверок проводится свертывание ПКП.
Выполнение операций по подготовке к техническому обслуживанию боевых средств ракетного комплекса - ракеты и механизма пускового (ПМ) позволяет:
- собрать схему соединения для проведения самотестирования КПА;
- убедиться в исправности аппаратных средств. Выполнение проверки функционирования МП и ракеты ракетного комплекса:
- убедиться в исправности МП и ракеты;
- поддерживать в высокой степени готовности боевые средства ракетных комплексов.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
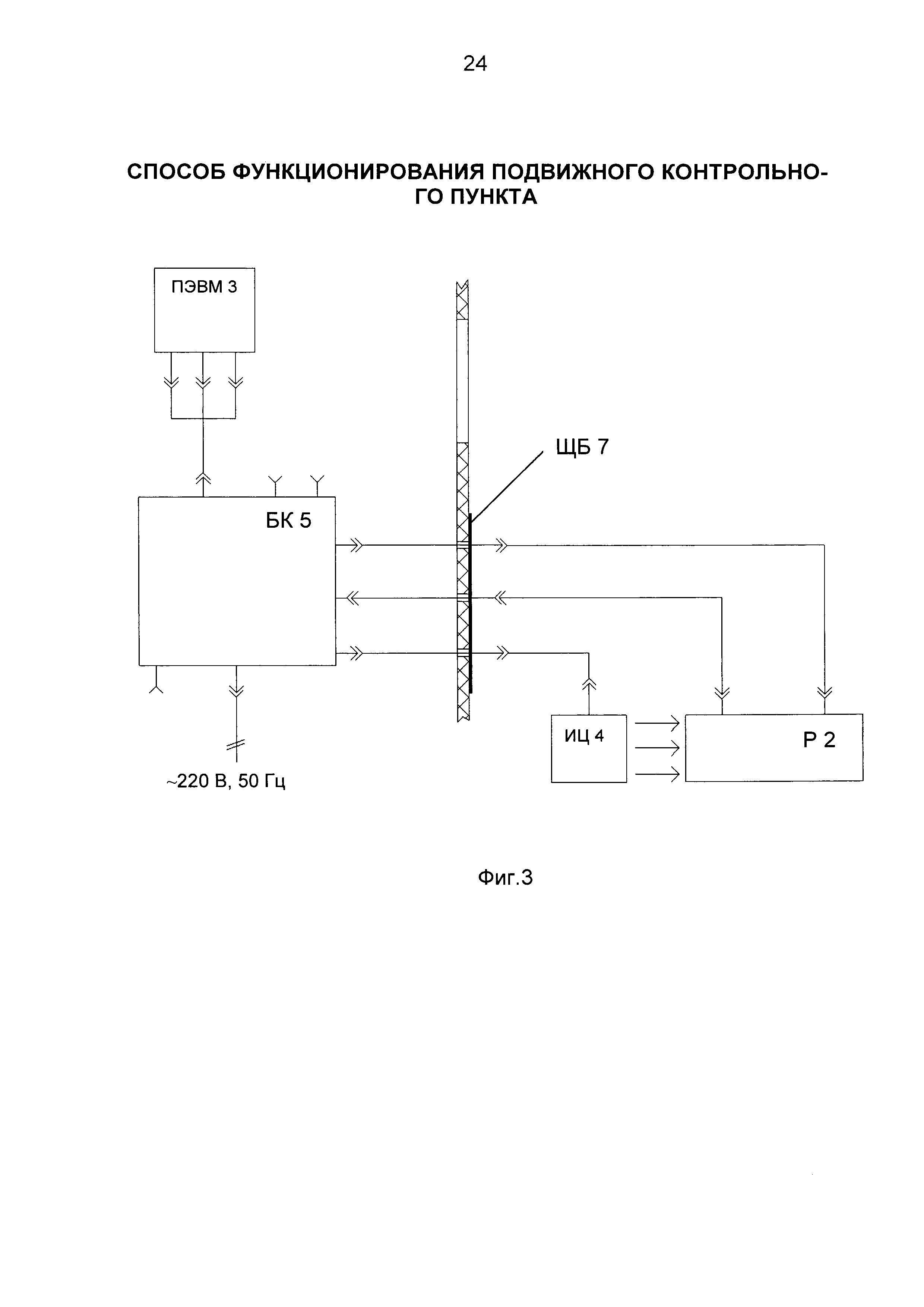
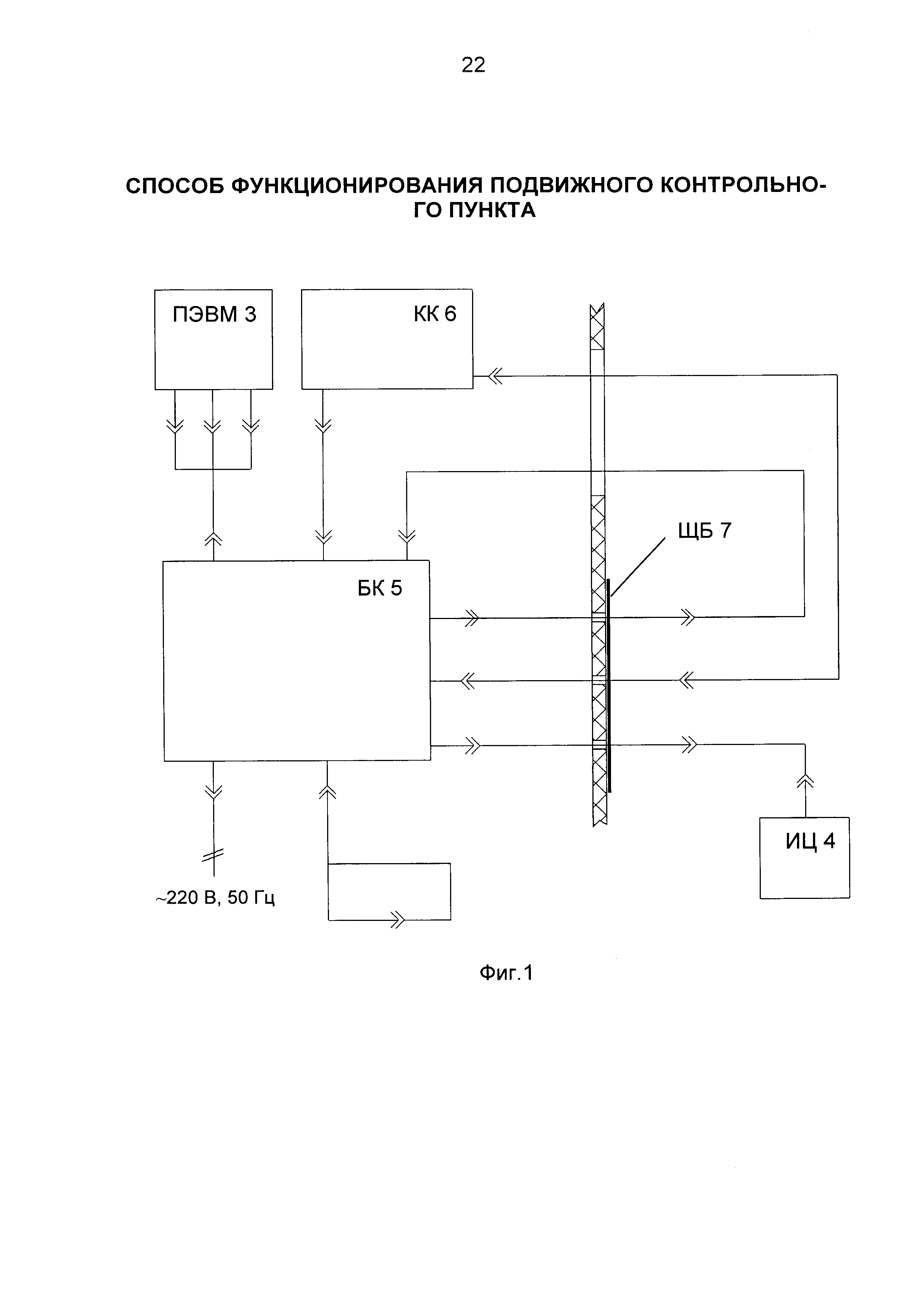
Сущность изобретения поясняется чертежами, где на фиг. 1 показана схема соединений ПКП при проведении самоконтроля КПА (режим «01»); на фиг. 2 - схема соединений ПКП при проверке механизма пускового (режим «02»); на фиг. 3 - схема электрическая соединений ПКП при проверке ракеты (режим «03»).
Подвижный контрольный пункт по данному способу функционирует следующим образом. Расчет ПКП состоит из двух человек: старшего оператора (командира) и оператора (водителя-электромеханика). Во время проверки командир проводит и контролирует развертывание и свертывание ПКП, находится на первом рабочем месте внутри кузова-фургона ПКП, работает с КПА и средствами измерений. Оператор проводит развертывание и свертывание ПКП, подключает ПКП к первичному источнику питания, во время проверки изделий находится на втором рабочем месте снаружи кузова-фургона рядом со столом, на котором расположена МП 1 или ракета (Р) 2 и выполняет указания старшего оператора по ходу проверки, обслуживает шасси автомобиля и кузов-фургон. При проверке большого числа контролируемых изделий для обеспечения заданной производительности в помощь расчету выделяется дополнительный обученный персонал.
После совершения марша при выборе места размещения ПКП учитываются требования по безопасности. Для установки ПКП на позиции выбирают удобную, ровную площадку размерами не менее (10×10) м на расстоянии не более 25 м от источника электропитания - распределительного щита промышленной сети или передвижной электростанции. Для проверки боевых средств ПКП располагают в непосредственной близости (но не ближе 50 м) от склада с изделиями.
Водитель-электромеханик проводит заземление. Для заземления необходимо забить заземлители рабочего заземляющего устройства в грунт на глубину от 450 до 500 мм, на расстоянии около 1 метра друг от друга.
Подключают ПКП к используемому источнику электроэнергии по соответствующей схеме соединений в зависимости от типа сети.
В развертывании палатки участвует весь расчет ПКП. Руководит работами командир машины. Палатку извлекают из укладки в кузове-фургоне, устанавливают ее вдоль правого борта.
Включают освещение и светомаскировку. При отсутствии необходимости светомаскировки устанавливают режим общего или дежурного освещения. Палатка освещается переносными светильниками, закрепленными на петли в потолке. При проведении проверок используются светильники местного освещения, расположенные на правом и левом борту кузова-фургона.
В условиях пониженных температур в кузове-фургоне включается отопительно-вентиляционная установка в режиме отопления. В случае необходимости отопительно-вентиляционная установка используется в режиме вентиляции.
В условиях повышенных температур в кузове-фургоне включается кондиционер, имеющий возможность работы в режимах ручного и автоматического управления.
При необходимости проведения радиационной разведки используется измеритель мощности дозы, предназначенный для измерения мощности экспозиционной дозы гамма - излучения. При превышении порогового значения мощности экспозиционной дозы гамма-излучения выдается световой сигнал.
При наличии радиационного заражения включается фильтро-вентиляционная установка, предназначенная для воздухоснабжения герметизированных подвижных объектов наземной военной техники в зараженной атмосфере и создания избыточного давления воздуха внутри обитаемых отделений. Установка рассчитана на эксплуатацию на открытом воздухе, как на стоянке, так и при движении объекта.
Далее выполняется установка и сборка КПА в кузове-фургоне, открывается люк правого отсека, подготавливается к работе переговорное устройство между рабочими местами операторов.
После проводится подготовка КПА к техническому обслуживанию изделий. Для этого собирается схема соединений. Старший оператор устанавливает ПЭВМ 3 в рабочее положение, для чего поднимает крышку, закрывающую дисплей, вверх, включает питание. При этом на экране отображается процесс загрузки операционной системы, рабочий стол операционной системы с расположенным на нем ярлыком программы функционирования. Далее запускают программу функционирования КПА с помощью соответствующего ярлыка на рабочем столе ПЭВМ 3. При этом на экране ПЭВМ 3 должно отобразиться окно управляющей программы, в программе выбирается режим проверки 1 - «Самоконтроль КПА», нажимается кнопка «Начать проверку». При этом должно начаться отображение процесса проверки с индикацией номера и наименования контролируемого в данный момент параметра, а также результата измерения соответствующего параметра. Примерно через 1 мин в ПЭВМ 3 должен раздаться звуковой сигнал, а на экране - отобразиться строка о необходимости выполнить ручную операцию №1. Старший оператор с помощью переговорного устройства сообщает оператору на внешнем рабочем месте о необходимости выполнения ручной операции №1: визуального контроля засветки матового стекла имитатора цели (ИЦ) 4. Оператор в свою очередь сообщает о результатах контроля старшему оператору, который нажимает клавишу «Пробел» на клавиатуре ПЭВМ 3 и наблюдает продолжение проверки. После звукового сигнала в окне управляющей программы отображается результат проверки «ГОДЕН». Старший оператор нажимает кнопку «ЗАВЕРШЕНИЕ» в окне управляющей программы.
Далее проводится проверка функционирования МП. Для этого собирается схема соединений. Старший оператор устанавливает ПЭВМ в рабочее положение, для чего поднимает крышку, закрывающую дисплей, вверх, включает питание. При этом на экране отображается процесс загрузки операционной системы, рабочий стол операционной системы с расположенным на нем ярлыком программы функционирования. Далее запускают программу функционирования КПА с помощью соответствующего ярлыка на рабочем столе ПЭВМ. При этом на экране ПЭВМ 3 отображается окно управляющей программы. Убеждаются в том, что все тумблеры и пусковой крючок МП 1 установлены в исходное положение. Проверяемый МП 1 присоединяется к соединителям. В программе выбирается режим проверки 2 - «Контроль МП», нажимается кнопка «Начать проверку». При этом должно начаться отображение процесса проверки с индикацией номера и наименования контролируемого в данный момент параметра, а также результата измерения соответствующего параметра. Примерно через 0,5 мин в ПЭВМ 3 должен раздаться звуковой сигнал, а на экране - отобразиться строка о необходимости выполнить определенную ручную операцию. В этой и во всех последующих операциях после звукового сигнала и отображения строки состояния «Выполнить РУЧНУЮ ОПЕРАЦИЮ №» в управляющей программе ПЭВМ необходимо согласно таблице 1 выполнить действие, а затем нажать и отпустить клавишу «Пробел» на клавиатуре ПЭВМ.
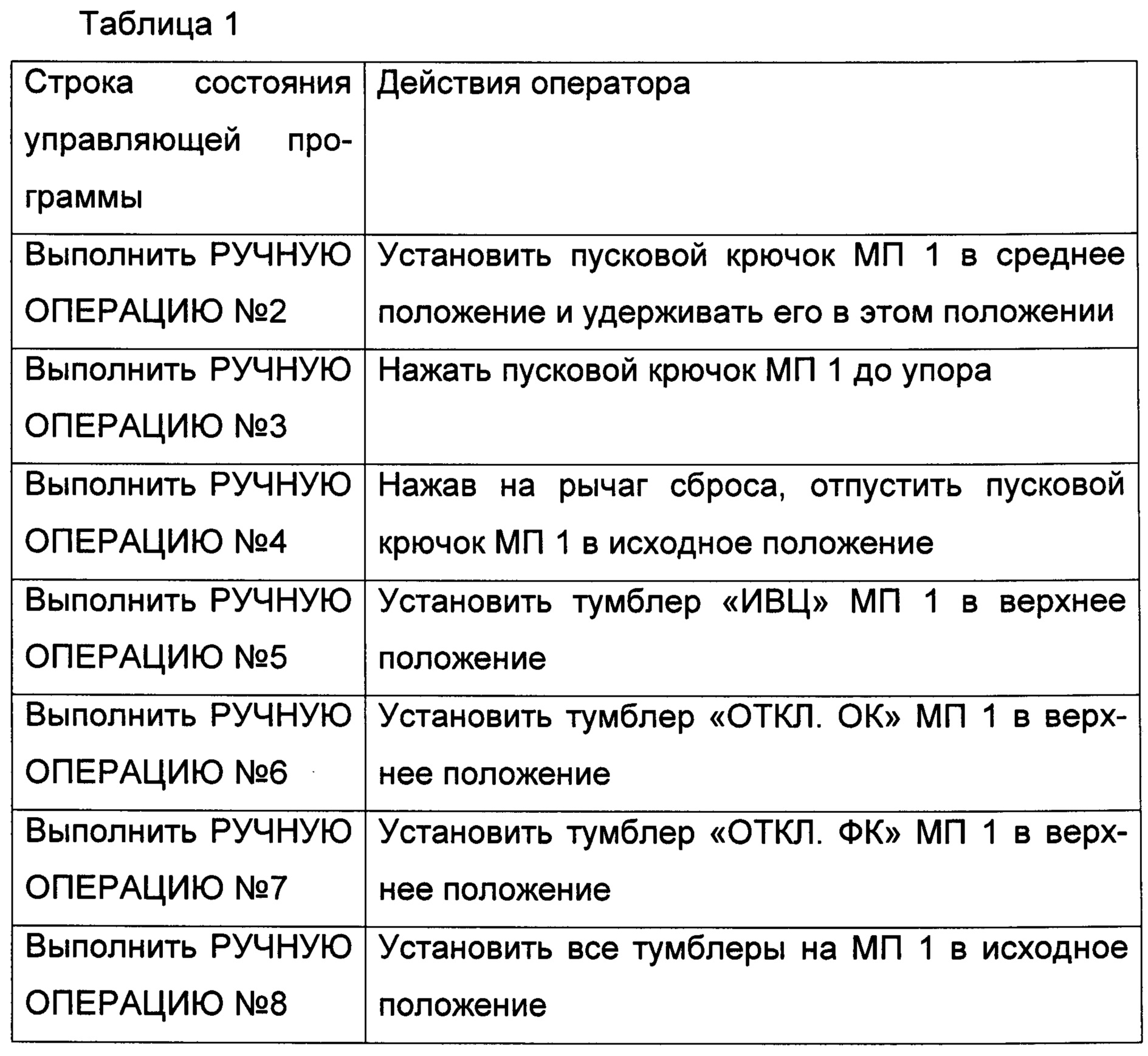
В течение проверки периодически должен прослушиваться звук в телефоне проверяемого МП 1. После выполнения последней ручной операции в ПЭВМ 3 должен раздается звуковой сигнал, в окне управляющей программы должен отображается результат проверки «ГОДЕН». Отсутствие звукового сигнала телефона проверяемого МП 1 свидетельствует о неисправности МП 1.
Далее проводится проверка функционирования Р 2. Извлекается из ПКП аппарель с подставками и устанавливается на втором рабочем месте рядом с правым отсеком. Собирается схема соединений. Старший оператор устанавливает ПЭВМ 3 в рабочее положение, для чего поднимает крышку, закрывающую дисплей, вверх, включает питание. При этом на экране отображается процесс загрузки операционной системы, рабочий стол операционной системы с расположенным на нем ярлыком программы функционирования. Далее запускают программу функционирования КПА с помощью соответствующего ярлыка на рабочем столе ПЭВМ 3. При этом на экране ПЭВМ 3 должно отображается окно управляющей программы. Оператором проверяемая Р 2 закрепляется на подставках. Убедившись, что Р 2 подготовлена к проверке, она присоединяется к соединителям. Старшему оператору с помощью переговорного устройства сообщается о готовности к проведению проверок Р 2. В управляющей программе ПЭВМ выбирается режим проверки 3 - «Контроль ракеты» и нажимается кнопка «Начать проверку». При этом должно начинаться отображение процесса проверки с индикацией номера и наименования контролируемого в данный момент параметра, а также результата измерения соответствующего параметра. Должен прослушиваться звук вращающегося ротора гироскопа проверяемой Р 2. Примерно через 0,5 мин в ПЭВМ 3 должен раздаться звуковой сигнал, а на экране отобразиться строка состояния о необходимости выполнить ручную операцию №9. Старший оператор с помощью переговорного устройства сообщает оператору о необходимости выполнения ручной операции №9. Оператору необходимо при выполнении ручной операции №9: убедиться в свечении индикатора «ЦЕЛЬ» при нажатии кнопки «ВДОГОН», в свечении индикатора «ЛТЦ» при нажатии кнопки «МАЛАЯ» и сообщить старшему оператору о результатах проверки. Старший оператор при положительных результатах ручной операции №9 нажимает клавишу «Пробел» на клавиатуре ПЭВМ. После получения звукового сигнала в окне управляющей программы при положительном исходе проверки должен отобразиться результат «ГОДЕН». Во время проверки должен прослушиваться звук вращающегося ротора гироскопа, светиться индикаторы при проведении ручной операции №9, прослушиваться звук работы рулей проверяемой ракеты. Отсутствие звука вращающегося ротора гироскопа, свечения индикаторов и звука работы рулей во время проверки свидетельствует о неисправности ракеты.
Во время проведения контроля блок коммутации (БК) 5 КПА обеспечивает преобразование напряжения первичного источника питания в стабилизированное напряжение питания постоянного тока 27 В, предназначенное для обеспечения работы приборов КПА, а также контролируемых Р 2 и МП 1. Кроме того, БК 5 предназначен для формирования управляющих сигналов для выполнения комплексной проверки изделий. В конструкции БК 5 имеется контактная колодка (КК) 6 и кронштейн для стыковки контролируемого МП 1. КК 6 предназначена для обеспечения удобного присоединения контрольно-измерительных приборов к соединителям БК 5 при проведении технического обслуживания. Связь боевых средств ракетного комплекса на внешнем рабочем месте ПКП с КПА, размещенной внутри кузова-фургона, осуществляется через щиток бортовой (ЩБ) 7.
В свертывании ПКП участвует весь расчет. Командир ПКП (старший оператор) руководит работами по свертыванию, приводит аппаратуру и оборудование ПКП в исходное состояние, участвует в свертывании палатки и после свертывания проверяет надежность крепления КПА и оборудования. Водитель-электромеханик (оператор) свертывает внешнее рабочее место, участвует в приведении в исходное состояние КПА, в свертывании палатки, отключает ПКП от внешних источников электроэнергии, выключает электрооборудование кузова-фургона, отключает заземление ПКП.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа функционирования подвижного контрольного пункта, обеспечивающего автоматизированную, количественную оценку нахождения значений параметров изделия в заданных пределах, индикацию окончания процесса проверки с констатацией ее результата и возможностью просмотра полученных значений параметров на экране ПЭВМ.
Способ проверки зенитных ракет и пусковых установок, заключающийся в том, что перед контролем электрических параметров блоки устройства для проверки соединяются по соответствующей схеме, потом осуществляется режим самоконтроля устройства для проверки, после получения положительного результата блоки устройства для проверки соединяются по схеме с подключением реально контролируемого изделия и производится автоматизированный режим контроля параметров электрической системы контролируемого изделия, осуществляется вывод визуальной информации о результатах проверки, отличающийся тем, что после выполнения подготовки к техническому обслуживанию боевых средств ракетного комплекса - ракеты и механизма пускового (ПМ), сборки схемы соединения при проведении самоконтроля КПА (режим «01»), установки ПЭВМ в рабочее положение, загрузки операционной системы, запуска программы функционирования КПА, выбора режима проверки 1 - «Самоконтроль КПА», запуска процесса проверки, который сопровождается отображением последовательности проверки с индикацией номера, наименования контролируемого параметра и результата его измерения, получение звукового сигнала и отображение на экране строки о необходимости выполнения ручной операции №1, с помощью переговорного устройства сообщение оператору на внешнем рабочем месте о необходимости выполнения ручной операции №1, после получения старшим оператором сообщения о результатах выполнения ручной операции №1 продолжение процесса проверки, в конце проверки получение звукового сигнала и отображение на экране результата проверки «ГОДЕН», выполняется проверка функционирования МП ракетного комплекса: сборка схемы соединения при проведении контроля МП (режим «02»), установка ПЭВМ в рабочее положение, загрузка операционной системы, запуск программы функционирования КПА, присоединение проверяемого ПМ к соединителям, выбор режима проверки 2 - «Контроль МП», запуск процесса проверки, которая сопровождается отображением последовательности проверки с индикацией номера, наименования контролируемого параметра и результата измерения его проверки, получение звуковых сигналов и отображений на экране строки о необходимости выполнения ряда ручных операций №2…№8, с помощью переговорного устройства сообщение оператору на внешнем рабочем месте о необходимости выполнения ручных операций №2…№8, после получения старшим оператором сообщения о результатах выполнения последней ручной операции продолжение процесса проверки, получение в конце проверки звукового сигнала и отображение на экране результата проверки «ГОДЕН», во время проверки периодическое прослушивание наличия звука в телефоне проверяемого МП, выполняется проверка функционирования ракеты ракетного комплекса: сборка схемы соединения при проведении контроля ракеты (режим «03»), установка ПЭВМ в рабочее положение, загрузка операционной системы, запуск программы функционирования КПА, установка ракеты и имитатора цели, присоединение проверяемой ракеты к соединителям, выбор режима проверки 3 - «Контроль ракеты», запуск процесса проверки, которая сопровождается отображением процесса проверки с индикацией номера, наименования контролируемого параметра и результата его проверки, получение звукового сигнала и отображение на экране строки о необходимости выполнения ручной операции №9, с помощью переговорного устройства сообщение оператору на внешнем рабочем месте о необходимости выполнения ручной операции №9, после получения старшим оператором сообщения о результатах выполнения ручной операции продолжение процесса проверки, получение в конце проверки звукового сигнала и отображение на экране результата проверки «ГОДЕН», во время проверки прослушивание наличия звука вращающегося ротора гироскопа, работы рулей проверяемой ракеты, свечения индикаторов при проведении ручной операции №9, получение результата «ОТКАЗ» при любом виде поверок свидетельствует о неисправности проверяемого изделия, после завершения проверок проводится свертывание ПКП.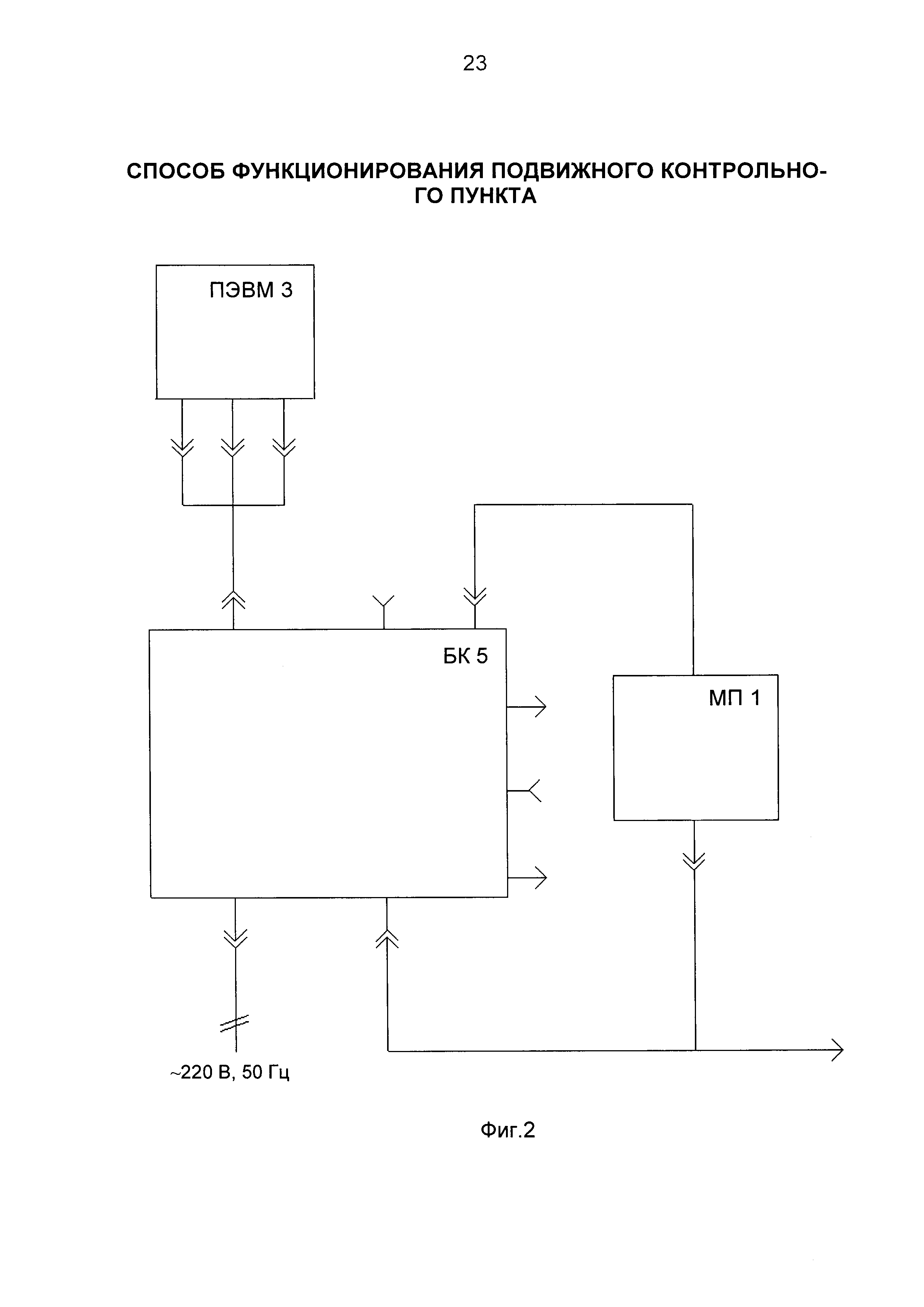
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ создания топогеодезических сетей для подготовки боевых действий ракетных войск, артиллерии и противовоздушной обороны сухопутных войск
Самодвижущаяся платформа робототехнического комплекса
Устройство для закрепления пустотелой детали
Способ информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса
Исполнительное устройство перемещения
Храповое устройство для стопорения вала
Система для определения и обеспечения показателей надёжности объекта военной техники
Имитатор воздушных целей
Система управления многофункционального робототехнического комплекса обеспечения боевых действий
Регулируемый спусковой механизм огнестрельного оружия
Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства
Способ приема и передачи топопривязчиком дифференциальных поправок
Способ контроля точностных характеристик системы топопривязки и навигации

