Результат интеллектуальной деятельности: Способ контроля точностных характеристик системы топопривязки и навигации
Вид РИД
Изобретение
Изобретение относится к оборонной технике и, в частности, к методам проведения испытаний навигационной аппаратуры, устанавливаемой на шасси наземных транспортных средств.
Известен способ контроля работоспособности и точностных характеристик навигационной аппаратуры топопривязчика и средства, необходимые для его реализации (см. патент №2436044, опубл. 10.12.2011, Бюл. №34). Способ контроля работоспособности и точностных характеристик навигационной аппаратуры топопривязчика заключается в том, что проверка точности работы топопривязчика производится по результатам прокладки маршрута между контрольными точками, после чего на основе определенных топопривязчиком значений координат и дирекционного угла направления продольной оси рассчитываются ошибки в определении координат и дирекционного угла, и далее на основании полученных ошибок рассчитываются среднеквадратические ошибки определения координат и сравниваются с установленными предельными значениями. Процесс контроля навигационной аппаратуры топопривязчика разделен на три функциональных блока контрольных операций: блок операций по контролю работоспособности навигационной аппаратуры, блок контрольных операций, проводимых при первоначальном ориентировании, блок контрольных операций по определению точностных характеристик навигационной аппаратуры. Блок операций по контролю работоспособности включает в себя проверки по следующим параметрам: время подготовки топопривязчика к работе, возможность выполнения работ без выхода расчета из топопривязчика на начальной и привязываемых точках, за исключением работ, проводимых с выносным оборудованием для топогеодезических определений и фиксации на местности элементов артиллерийской топогеодезической сети, возможность непрерывной работы топопривязчика до 24 часов без изменения точностных характеристик навигационной аппаратуры, возможность сохранения информации о своем местоположении (данные о координатах, высоте, дирекционном угле продольной оси топопривязчика при санкционированном выключении электропитания в течение - не менее 30 минут. Блок контрольных операций, проводимых при первоначальном ориентировании топопривязчика, включает в себя проверки по следующим параметрам: возможность начального ориентирования комплектом навигационного бортового оборудования с использованием исходных данных ориентирных направлений и автономно с помощью бортовых и выносных средств, входящих в состав топопривязчика (по буссоли или теодолиту, по данным гирокомпасирования бесплатформенной инерциальной навигационной системы, по навигационной аппаратуре потребителей космической навигационной системы с угломерным каналом), возможность аппаратуры топопривязчика обеспечивать работу с начальными координатами, вводимыми как вручную, так и автоматически, передаваемыми с навигационной аппаратуры потребителей космической навигационной системы или после расчета местоположения топопривязчика с использованием угломерно-дальномерных определений. Блок контрольных операций по определению точностных характеристик навигационной аппаратуры включает в себя проверки по следующим параметрам: точность определения приращений плановых координат в автономном режиме работы топопривязчика продолжительностью до 20 мин. без использования информации о скорости от внешних источников, точность определения приращений плановых координат от пройденного пути при безостановочном движении до 2 ч. с использованием информации о скорости от внешних источников, точность определения приращений плановых координат в режиме с периодическими остановками через 30 мин. движения на время 1-2 мин. с использованием информации о скорости от внешних источников, точность определения приращений плановых координат и высоты с непрерывной коррекцией в движении по сигналам навигационной аппаратуры потребителей космической навигационной системы и системы определения высоты, точность определения дирекционного угла продольной оси базового шасси и точность определения углов тангажа и крена в движении и на стоянке через 1 мин. после прекращения движения.
Недостатками прототипа являются:
- недостаточная глубина проработки методик определения точностных характеристик навигационной аппаратуры топопривязчика;
- высокая сложность и стоимость реализации методик испытаний;
- недостаточно развернутый уровень проверок режимов определения навигационных параметров.
Предлагаемым изобретением решается задача по оптимизации методологических основ проведения испытаний навигационной аппаратуры, устанавливаемой на шасси наземных транспортных средств.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа контроля точностных характеристик системы топопривязки и навигации, обеспечивающей развернутый уровень проверок точностных характеристик как стационарно устанавливаемой на транспортном средстве, так и выносной навигационно-топогеодезической аппаратуры, сокращение материальных затрат на проведение различных типов испытаний за счет оптимизации методологии.
Указанный технический результат достигается тем, что в предлагаемом способе контроля точностных характеристик системы топопривязки и навигации, заключающемся в том, что проверка точности работы производится по результатам прокладки маршрута между контрольными точками опорной геодезической сети испытательной трассы, после чего на основе определенных аппаратурой значений координат и дирекционных углов направлений продольной оси транспортного средства рассчитываются ошибки в определении координат и дирекционных углов, и далее полученные значения ошибок сравниваются с установленными предельными значениями, новым является то, что в блок контрольных операций по определению точностных характеристик навигационной аппаратуры включены операция по контролю времени и точности ориентирования с помощью теодолита и артиллерийской буссоли, операция по точности определения местоположения транспортного средства по цифровой карте местности, при определении точностных характеристик навигационной аппаратуры, включающих в себя проверки по следующим параметрам: точность определения приращений плановых координат от пройденного пути при безостановочном движении до 2 ч. с использованием информации о скорости от внешних источников, точность определения приращений плановых координат и высоты с непрерывной коррекцией в движении по сигналам НАП КНС и системы определения высоты (СОВ), на этапе предъявительских и приемосдаточных испытаний точность оценивается по предельной погрешности определения приращений плановых координат, а на этапе периодических, квалификационных и типовых испытаний - по средней квадратической погрешности, точность определения дирекционного угла продольной оси базового шасси транспортного средства оценивается по предельной погрешности при проведении любых видов испытаний.
Включение в блок контрольных операций по определению точностных характеристик навигационной аппаратуры операции по контролю времени и точности ориентирования с помощью теодолита и артиллерийской буссоли позволяет:
- оценить точность ориентирования в ручном режиме работы с использованием выносной топогеодезической аппаратуры;
- оценить время подготовки и проведения работ с помощью теодолита и буссоли.
Включение в блок контрольных операций по определению точностных характеристик навигационной аппаратуры операции по точности определения местоположения по цифровой карте местности позволяет оперативно получать координаты ориентиров, находящихся вне прямой видимости с транспортного средства, с известной заранее погрешностью.
Введение оценки точностных характеристик некоторых параметров по предельной погрешности их определения при проведении некоторых видов испытаний позволяет:
- снизить сложность и стоимость реализации методик испытаний;
- ускорить процесс проведения испытаний.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
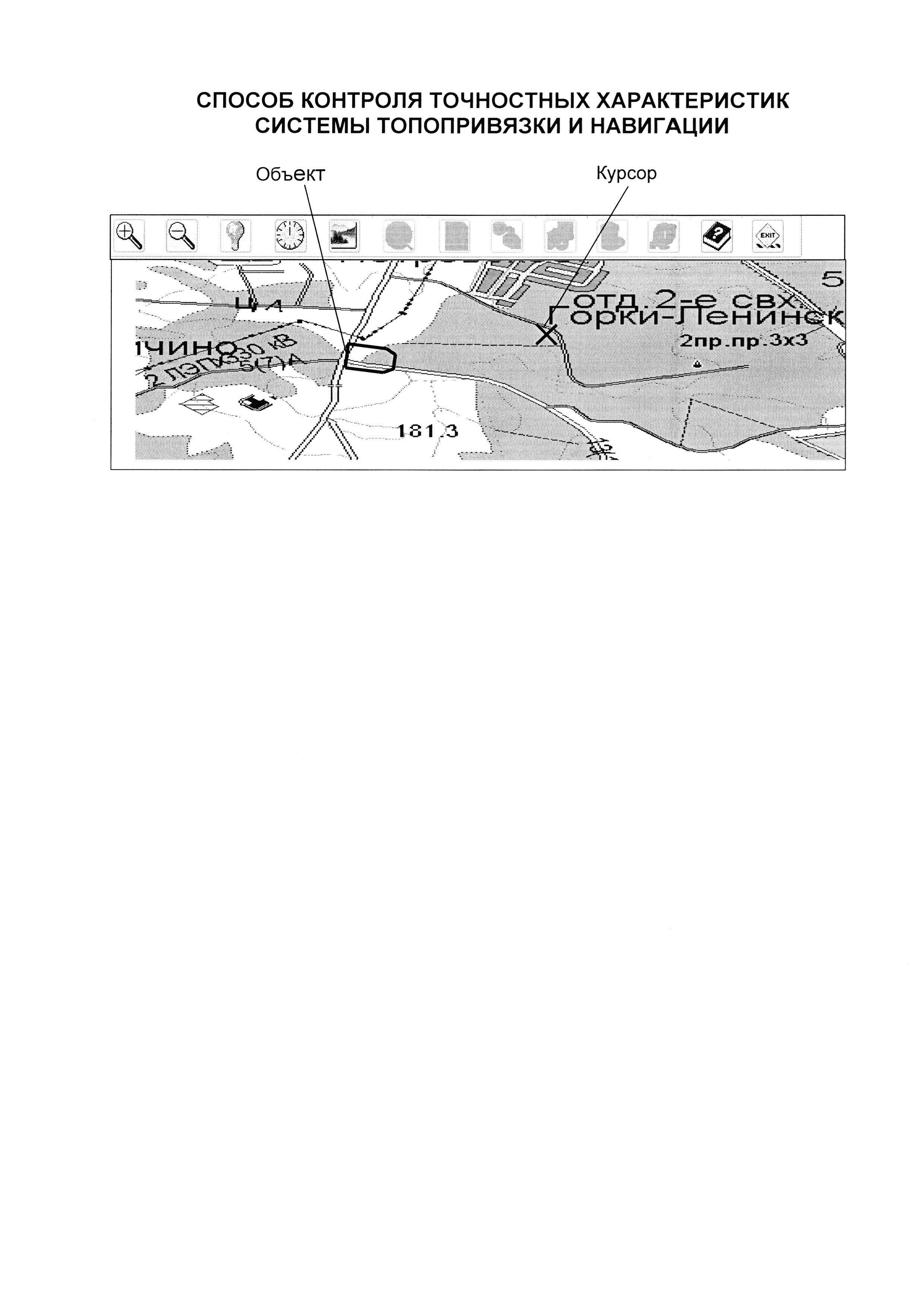
Сущность изобретения поясняется чертежом, где показано рабочее окно с цифровой картой местности.
Способ контроля точностных характеристик системы топопривязки и навигации осуществляется следующим образом.
Включенная в состав проверок операция по контролю времени и точности ориентирования с помощью теодолита и артиллерийской буссоли осуществляется в следующем порядке:
- транспортное средство устанавливается на одной линии с ориентиром и контрольной точкой с известными координатами (центром считается установленный на транспортном средстве визир) на удалении 10-20 м от контрольной точки, направив ось машины перпендикулярно линии между ориентиром и контрольной точкой;
- последовательно подаются команды на проведение подготовительных работ по расстановке: теодолита и буссоли над контрольной точкой с допустимым отклонением ±1/3000 дальности до ориентира;
- одновременно с началом работ с помощью секундомера засекается время (tпод), затрачиваемое на расстановку и горизонтирование оборудования: теодолита и буссоли;
- проводятся работы по ориентированию транспортного средства с помощью теодолита и зафиксируется время (tТ) их проведения в следующем порядке:
- включается секундомер;
- записываются начальные показания теодолита αнач;
- монокуляр теодолита наводится на ориентир и записываются показания теодолита αТ;
- монокуляр теодолита наводится на визир транспортного средства и записываются показания теодолита αТВ;
- визир наводится на монокуляр теодолита и снимается отсчет βВИЗ;
- переводятся полученные значения углов (α) из градусов в деления угломера (A), выбрав в программно-аппаратном комплексе задачу по переводу из градусов в д.у.;
- из показаний теодолита на ориентир AТ вычитается начальное значение Анач для получения угла разворота теодолита до ориентира (если АТ<Анач, то к нему прибавляется 6000):
AТор=АТ-Анач;
- из показаний теодолита на визир Атв вычесть начальное значение Анач для получения угла разворота теодолита до визира (если Атв<Анач, то к нему прибавляется 6000):
АТвиз=Атв-Анач;
- для получения поправки магнитного азимута на теодолит из дирекционного угла на ориентир Аор вычитается угол разворота теодолита (АТор) (если д.у. на ориентир меньше угла разворота теодолита, то необходимо прибавить к нему 6000):
ΔAТ=Aop-AТор;
- определить направление оси транспортного средства по формуле:
если направление оси относительно магнитного азимута <180°, то:
АТП=(АТ Виз+ΔАТ+3000)-βВИЗ;
если направление оси топопривязчика относительно магнитного азимута >180°, то:
АТП=(АТ Виз+ΔАТ-3000)-βВИЗ;
если полученное значение АТП<0, то необходимо прибавить 6000, если АТП>6000, то необходимо вычесть из полученного значения 6000;
- выключается секундомер;
- проводятся работы и фиксируется время их проведения по ориентированию с помощью буссоли в следующем порядке:
- включается секундомер;
- монокуляр буссоли наводится на ориентир и снимается отсчет АБО;
- рассчитывается поправка на буссоль по следующей формуле:
ΔАБУС=Аор-АБО;
- монокуляром буссоли наводится на визир, установленный на транспортном средстве, и снимается отсчет АВИЗ;
- визир наводится на буссоль и снимается отсчет βВИЗ;
если направление оси относительно магнитного азимута <180°, то:
АТП=(АВИЗ+3000+ΔАБУС)-βВИЗ;
если направление оси относительно магнитного азимута >180°, то:
АТП=(АВИЗ-3000+ΔАБУС)-βВИЗ,
если полученное значение АТП<0, то необходимо прибавить 6000, если АТП>6000, то необходимо вычесть из полученного значения 6000;
- из программно-аппаратного комплекса записываются показания дирекционного угла, определенного бесплатформенной инерциальной навигационной системой (α);
- рассчитывается погрешность определения дирекционных углов, определенных по теодолиту и буссоли относительно показаний бесплатформенной инерциальной навигационной системы по формуле:
для теодолита:
для теодолита:
ΔАТП(т)=АТП(т)-α
для буссоли:
ΔАТП(Б)=АТП(Б)-α
Система навигации и топопривязки считается выдержавшей проверку, если разность определения угла при помощи теодолита и буссоли с углом определенным бесплатформенной инерциальной навигационной системой не превышает поправки визира, введенной в программно-аппаратный комплекс.
Включенная в состав проверок операция по контролю точности определения местоположения топопривязчика по цифровой карте местности осуществляется в следующем порядке:
- транспортное средство устанавливается над начальной точкой испытательной трассы с допустимым отклонением ±1 м относительно места крепления инерциальной навигационной системы;
- вводятся значения координат X, Y, Н начальной точки проведения испытаний;
- выбирается соответствующий режим для работы с цифровыми картами местности, при этом отображается рабочее окно с цифровой картой местности;
- визуально контролируется перемещение курсора на цифровой карте местности и индикация координат данного места;
- далее транспортное средство начинает движение до ближайшей контрольной точки;
- на контрольной точке транспортное средство необходимо установить с допустимым отклонением ±1 м относительно места крепления инерциальной навигационной системы и через 2 мин после остановки курсор устанавливается на условное отображение транспортного средства и записываются значения координат и высоты;
- далее необходимо найти разность координат, отображенных на цифровой карте местности - ХЦКМ, YЦКМ, НЦКМ и координат контрольной точки ХК, YК, НК:
ΔXi=ХЦКМ-ХК; ΔYi=YЦКМ-YК; ΔHi=НЦКМ-НК;
- работы проводятся несколько раз;
- вычисляется средняя квадратическая ошибка определения местоположения по ЦКМ:
где ΔXi, ΔYi и ΔHi - значения ошибок в i-ой реализации;
n - общее число реализаций.
Система топопривязки и навигации считается выдержавшей проверку, если значения σΔX, σΔY не превышают величин более ±0,6 мм масштаба карт, а σΔH не превышает  соседних изолиний по высоте.
соседних изолиний по высоте.
Операция по контролю точности определения приращений плановых координат от пройденного пути при безостановочном движении до 2 ч. с использованием информации о скорости от внешних источников (датчики скорости механический и доплеровский) проводится в следующей последовательности:
- транспортное средство устанавливается на начальной точке с известными координатами ХH, YH и высотой НH испытательной трассы с допустимым отклонением центра инерциальной навигационной системы ±1 м;
- отключается аппаратура спутниковой навигации;
- далее вводятся значения координат ХН, YН начальной точки проведения испытаний;
- включается секундомер и начинается движение к контрольной точке;
- совершается марш длительностью до 2 ч по аттестованной трассе со средней скоростью не более 50 км/ч;
- при прибытии на конечную точку трассы выключают секундомер, фиксируют значения пройденного пути S и координат XK, YK.
При предъявительских и приемосдаточных испытаниях выполняется один заезд, при котором определяют значение предельной погрешности Δпр по формуле:


где ХКИСТ, YКИСТ - истинные (паспортные) значения соответствующих координат конечной точки;
ХКТП, YКТП - значения соответствующих координат конечной точки, выработанных в ходе движения транспортного средства;
S - значение пройденного пути при движении из начальной точки к конечной (указанно в паспорте на испытательную трассу).
При периодических, квалификационных и типовых испытаниях выполняется несколько заездов, по результатам которых рассчитываются значения среднеквадратических погрешностей определения приращений плановых координат на конечной точке маршрута по формулам:
где ΔXi и ΔYi - значения соответствующих погрешностей определения приращений в i-ой реализации;
n - общее число реализаций;


где ХKiИСТ, YKiИСТ - истинные значения соответствующих координат конечной точки в i-ой реализации;
ХКiТП, YКiТП - значения соответствующих координат конечной точки, выработанных в ходе движения ТП в i-ой реализации.
Далее рассчитывается изменение погрешностей определения приращений координат в процентах от пройденного пути по формулам вида:
где S - значение пройденного пути при движении из начальной точки к конечной (указанно в паспорте на испытательную трассу);
Система навигации и топопривязки считается выдержавшим контроль, если:
- при предъявительских и приемосдаточных испытаниях, предельная погрешность определения приращений координат (Δпр х, Δпр у) при безостановочном движении до 2 ч с использованием информации от внешних источников - не более 0,2%  от пройденного пути;
от пройденного пути;
- при периодических, квалификационных и типовых испытаниях, средняя квадратическая погрешность определения приращений координат  при безостановочном движении до 2 ч с использованием информации от внешних источников - не более 0,1% от пройденного пути.
при безостановочном движении до 2 ч с использованием информации от внешних источников - не более 0,1% от пройденного пути.
Операция по контролю точности определения приращений плановых координат и высоты с непрерывной коррекцией в движении по сигналам спутниковой навигационной системы и системы определения высоты проводится в следующей последовательности:
- транспортное средство устанавливается на контрольной точке с известными координатами ХН, YН, НН испытательной трассы с допустимым отклонением центра инерциальной навигационной системы ±1 м;
- через 20 мин стоянки на контрольной точке вводят значения координат ХН, YН, НН начальной контрольной точки проведения испытаний;
- включается секундомер и начинается движение;
- совершается марш продолжительностью до 1 часа при предъявительских, приемосдаточных испытаниях и по нескольким контрольным точкам при периодических, квалификационных и типовых испытаниях со средней скоростью не более 50 км/ч;
- на конечной контрольной точке с известными координатами транспортное средство останавливается, записываются значение координат и высоты, выключается секундомер;
При предъявительских и приемосдаточных испытаниях выполняется один заезд, при котором определяют значение предельной погрешности Δпр по формуле:



где ХКИСТ, YКИСТ, НКИСТ - истинные значения соответствующих координат и высоты конечной точки;
ХКТП, YКТП - значения соответствующих координат конечной точки, выработанных в ходе движения;
НКТП - значение высоты конечной точки, выработанной в ходе движения.
При периодических, квалификационных и типовых испытаниях выполняется несколько заездов по результатам которых рассчитывают значения среднеквадратических погрешностей определения приращений плановых координат и высоты на конечной точке маршрута по формулам:
где ΔXi, ΔYi и ΔHi - значения соответствующих максимальных погрешностей определения приращений в i-ой реализации;
n - общее число реализаций.



где ХКiИСТ, YКiИСТ, НКiИСТ - истинные значения соответствующих координат и высоты контрольной точки в i-ой реализации;
ХКiТП, YКiТП - значения соответствующих координат контрольной точки, выработанных в ходе движения в i-ой реализации;
НКiТП - значение высоты контрольной точки, выработанной в ходе движения ТП в i-ой реализации.
Система топопривязки и навигации считается выдержавшим контроль, если
- при предъявительских и приемосдаточных испытаниях, если предельная погрешность определения приращений плановых координат (Δпр х, Δпр у) с непрерывной коррекцией в движении по сигналам спутниковой навигационной системы не превышает 6 м (2σ'ΔX, 2σ'ΔY), а при определении высоты при помощи системы определения высоты Δпр Н не превышает 10 м (2 σ'ΔН).
- при периодических, квалификационных и типовых испытаниях, средняя квадратическая погрешность определения приращений плановых координат (σΔX, σΔY) с непрерывной коррекцией в движении по сигналам спутниковой навигационной системы не превышает 3 м, а при определении высоты при помощи системы определения высоты σΔН не превышает 5 м по высоте.
Операция по контролю точности определения дирекционного угла продольной оси базового шасси оценивается по предельной погрешности при проведении любых видов испытаний и проводится в следующей последовательности:
- транспортное средство устанавливается на начальной точке с направлением его продольной оси в сектор 0°±20°;
- вводят значения координат ХН, YН начальной точки;
- при появлении оперативного сообщения о запуске выставки инерциальной навигационной системы включается секундомер;
- при появлении сообщения о готовности инерциальной навигационной системы выключают секундомер, записывают значение дирекционного угла;
- повторяют работы еще несколько раз;
- далее необходимо рассчитать предельную погрешность дирекционного угла (по уровню вероятности 0,95) по формулам:
где  - среднее значение совокупности (n) отклонений (по модулю) фактических значений дирекционного угла αд от ее среднего значения αср;
- среднее значение совокупности (n) отклонений (по модулю) фактических значений дирекционного угла αд от ее среднего значения αср;
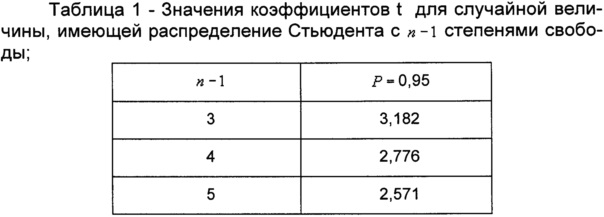
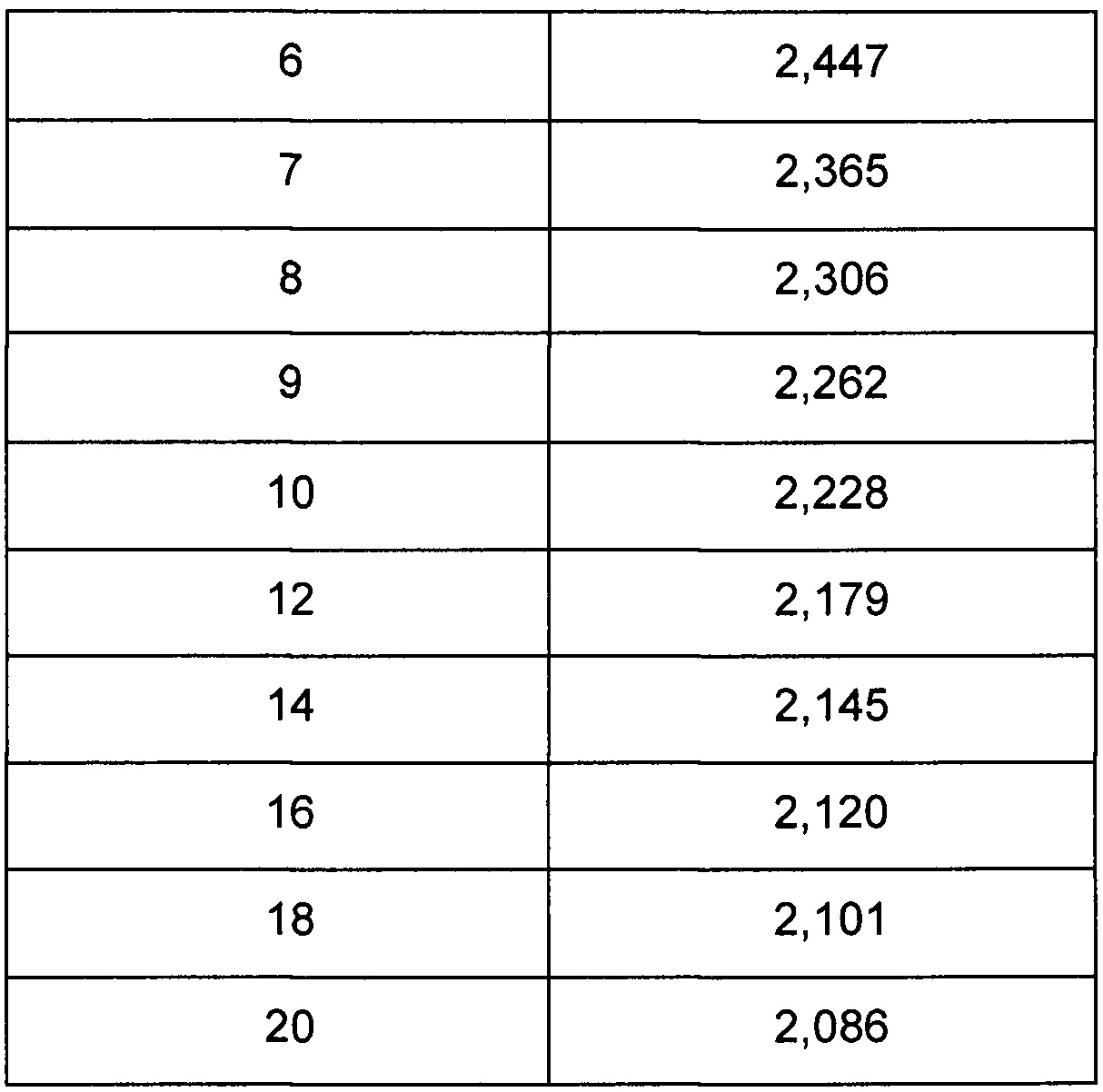
t - табличный коэффициент Стьюдента, определяющий верхнюю границу доверительного интервала при заданной доверительной вероятности Р=0,95 и числе результатов измерений n, приведенный в таблице 1;
- значения коэффициентов распределение Стьюдента.
 - оценка среднеквадратического отклонения величины
- оценка среднеквадратического отклонения величины 
где αi - i-oe отклонение дирекционного угла (αl=αдi-αср);
αдi - фактическое значение дирекционного угла;
αср - среднее значение дирекционного угла: 
где s - несмещенная оценка среднеквадратического отклонения группы, содержащей n результатов измерений:
- определить усредненное время продолжительности режима определения дирекционного угла по формуле:
где tвi - время выставки изделия к работе в i-м запуске;
n - число реализаций;
- при получении значения предельной погрешности дирекционного угла, превышающей заданные требования, провести исключения грубых погрешностей используя критерий Граббса по формулам:
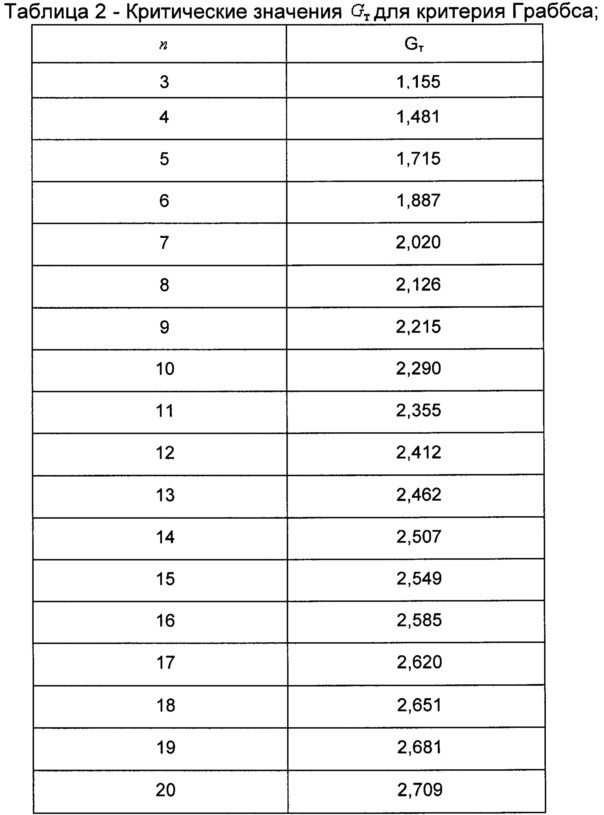
Сравнить G1 и G2 с теоретическим значением GT критерия Граббса, приведенного в таблице 2. Если G1 больше GT, то αmax исключают как маловероятное значение. Если G2 больше GT, то αmin исключают как маловероятное значение. Исключенные углы (как маловероятное значение) повторно измерить, с последующим вычислением предельной погрешности и проверки наличия грубых погрешностей по критерию Граббса;
- критические значения критерия Граббса.
- далее транспортное средство последовательно развертывают с направлением его продольной оси в сектор 120°±20° и 240°±20°, повторяя работы, выполненные по предыдущему сектору.
Система топопривязки и навигации считается выдержавшим контроль, если предельная погрешность определения дирекционного угла продольной оси топопривязчика не превышает 4 угл. мин при времени определения по секундомеру не более 6 мин.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа контроля точностных характеристик системы топопривязки и навигации, обеспечивающей развернутый уровень проверок точностных характеристик как стационарно установленной на топопривязчике, так и выносной навигационно-топогеодезической аппаратуры, сокращение материальных затрат на проведение различных типов испытаний за счет оптимизации методологии.
Способ контроля точностных характеристик системы топопривязки и навигации, заключающийся в том, что проверка точности работы производится по результатам прокладки маршрута между контрольными точками опорной геодезической сети испытательной трассы, после чего на основе определенных значений координат и дирекционных углов направлений продольной оси транспортного средства рассчитываются ошибки в определении координат и дирекционных углов, и далее полученные значения ошибок сравниваются с установленными предельными значениями, отличающийся тем, что в блок контрольных операций по определению точностных характеристик навигационной аппаратуры включены операция по контролю времени и точности ориентирования с помощью теодолита и артиллерийской буссоли, операция по точности определения местоположения транспортного средства по цифровой карте местности, при определении точностных характеристик навигационной аппаратуры, включающих в себя проверки по следующим параметрам: точность определения приращений плановых координат от пройденного пути при безостановочном движении до 2 ч с использованием информации о скорости от внешних источников, точность определения приращений плановых координат и высоты с непрерывной коррекцией в движении по сигналам НАП КНС и системы определения высоты (СОВ), на этапе предъявительских и приемосдаточных испытаний точность оценивается по предельной погрешности определения приращений плановых координат, а на этапе периодических, квалификационных и типовых испытаний - по средней квадратической погрешности, точность определения дирекционного угла продольной оси базового шасси транспортного средства оценивается по предельной погрешности при проведении любых видов испытаний.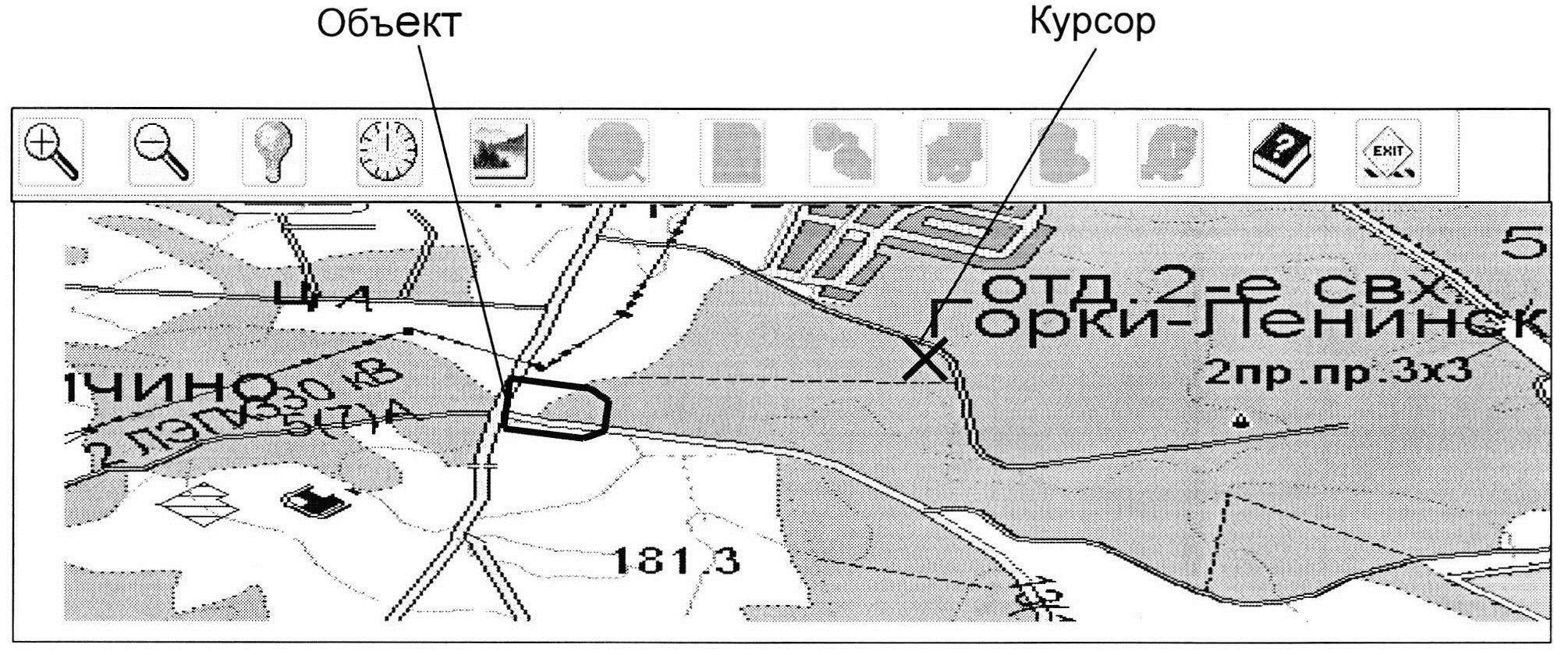
Способ термической обработки бойков и тяжелонагруженных штампов
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы
Кронштейн для установки панельного компьютера на подвижном объекте
Унитарный боеприпас для гладкоствольного оружия
Автоматическое стрелковое оружие
Функциональный комплект установочных средств
Стол для размещения аппаратных средств в подвижном объекте
Способ контроля электрических параметров системы вооружений и автоматизированный комплекс для его осуществления
Спусковой механизм автоматического оружия
Контрольно-проверочная машина
Огнестрельное оружие с устройством для выбора правостороннего или левостороннего выброса гильзы
Подвижный контрольный пункт

