Результат интеллектуальной деятельности: СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ НАГРУЖЕННОГО МОБИЛЬНОГО РОБОТА ПРИ НАЛИЧИИ ПРОСКАЛЬЗЫВАНИЯ КОЛЁС
Вид РИД
Изобретение
Изобретение относится к испытательной технике и предназначено для исследования движения автоматически управляемых мобильных роботов, управляемых за счет разности скоростей вращения ведущих колес.
Известен патент РФ на изобретение №2284022 (дата публикации заявки 10.03.2005, бюл. №7) «Стенд для испытания одноосного колесного движителя при переменной вертикальной нагрузке и криволинейном движении», который позволяет проводить испытания реального физического одноосного приводного двухколесного движителя с переменной вертикальной нагрузкой, создаваемой специальным загружающим устройством, установленным на раму движителя, соединенную с опорно-поворотным устройством, позволяющим изменять радиус поворота.
Стенд включает водило, соединяющее опорно-поворотное устройство с рамой, на которой смонтирован привод колесного движителя, а также ведущий мост с исследуемым колесом. Стенд выполнен с дополнительной рамой со вторым колесом, а также загружающим устройством для создания и регулирования переменной нагрузки по величине и частоте. При этом стенд снабжен двумя гидроцилиндрами для снятия вертикальной нагрузки с испытываемых колес и выполнен с возможностью изменения угла установки колесного движителя в плане посредством винтовых тяг и с возможностью изменения радиуса поворота испытываемого колесного движителя посредством втулок, установленных в водиле. В результате повышается эффективность и точность испытаний колесного движителя.
Основной недостаток стенда заключается в возможности анализа только криволинейного движения по окружности изменяемого радиуса. Также радиус траектории криволинейного движения задается жестко опорно-поворотным устройством, вследствие чего отсутствует возможность внедрения и анализа законов управления боковым отклонением от заданной траектории движения.
В качестве прототипа выбран стенд, представленный в патенте РФ на изобретение №2561405 «Стенд и способ исследования движения робокара» (дата публикации заявки 10.08.2014, бюл. №22), который сочетает достоинство программного имитационного и физического моделирования. За счет наличия составляющей физического объекта управления стенд более полно учитывает кинематику и динамику движения реального робокара (мобильного робота), при этом отсутствует необходимость в наличии больших площадей (автодромов) для проведения испытаний. Стенд позволяет проводить исследования точности отслеживания заданной траектории, позиционирования, изменения скоростного режима при движении робокара как по криволинейным траекториям, так и при прямолинейном движении.
Стенд для исследования движения робокара, состоит из платформы, установленной стационарно на осях двух приводных колес, каждое из которых соединено через редукторы с валами двигателей постоянного тока, якори которых связаны посредством устройства сопряжения с выходом бортового контроллера. Платформа опирается на две наклонные стойки, закрепленные своим нижним концом на раме и расположенные по ромбовидной схеме по отношению к колесам, опирающимся на соответствующие круговые платформы, жестко закрепленные в своих центрах на вертикальных осях, установленных нижними концами в опорные подшипники, неподвижно соединенные с рамой, при этом под каждой круговой платформой с нанесенными по окружности на ее нижней плоскости светоотражательными полосками устанавливаются на вертикальных стойках, закрепленных на раме, датчики угловой скорости с выходами, связанными через устройство ввода-вывода с входом бортового контроллера, выход которого соединен с ПЭВМ верхнего уровня, связанной с компьютерной сетью, и с устройством сопряжения посредством устройства ввода-вывода. Все электрические элементы бортовой системы управления по цепи питания соединены с блоком питания.
С существенными признаками изобретения совпадает следующая совокупность признаков прототипа: стенд, состоящий из платформы, опирающейся на две наклонные стойки, соединенные неподвижно нижними концами с рамой, а верхними - с платформой, имеющей еще две точки опоры, расположенные по ромбовидной схеме по отношению к наклонным стойкам, в виде осей двух приводных колес робота, опирающихся на соответствующие круговые платформы, закрепленные в своих центрах на вертикальных осях, установленных своими нижними концами в опорных подшипниках, неподвижно соединенных с рамой, при этом под каждой круговой платформой с нанесенными по окружности на ее нижней плоскости светоотражательными полосками установлены на вертикальных стойках, закрепленных на раме, датчики угловой скорости круговых платформ с выходами, связанными через устройство ввода-вывода с входом бортового контроллера, выходы которого соединены также через устройство ввода-вывода с обмотками якорей двигателей постоянного тока, соединенных своими валами через редукторы с приводными колесами, и с ПЭВМ верхнего уровня, связанной с компьютерной сетью.
К недостаткам прототипа относятся: отсутствие учета проскальзывания колес при исследовании динамики в случае применения различных законов управления и влияния степени нагружения мобильного робота на величину сцепления колес с круговой платформой в зависимости от изменения коэффициента трения при разной нагрузке.
Задачей предлагаемого изобретения является расширение функций стенда за счет возможности учета проскальзывания колес в зависимости от степени нагружения мобильного робота.
Это достигается тем, что стенд для исследования движения нагруженного мобильного робота при наличии проскальзывания колес, состоит из платформы, опирающейся на две наклонные стойки, соединенные неподвижно нижними концами с рамой, а верхними - с платформой, и две оси приводных колес мобильного робота, расположенные по ромбовидной схеме по отношению к наклонным стойкам. Приводные колеса мобильного робота, опираются на соответствующие круговые платформы, закрепленные в своих центрах на вертикальных осях, установленных своими нижними концами в опорных подшипниках, неподвижно соединенных с рамой. При этом под каждой круговой платформой с нанесенными по окружности на ее нижней плоскости светоотражательными полосками установлены на вертикальных стойках, закрепленных на раме, датчики угловой скорости круговых платформ. Выходы датчиков угловой скорости, связанны через устройство ввода-вывода с входом бортового контроллера, выходы которого соединены также через устройство ввода-вывода с обмотками якорей двигателей постоянного тока, соединенных своими валами через редукторы с приводными колесами, и с ПЭВМ верхнего уровня, связанной с компьютерной сетью. С валами двигателей постоянного тока жестко связаны валы тахогенераторов постоянного тока, выходы которых, как и выходы тензодатчиков, установленных под опорными подшипниками вертикальных осей, соединенных с центрами круговых платформ по схеме винт-гайка с контргайкой, связаны через устройство ввода-вывода с входами бортового контроллера. Все электрические и электронные элементы бортовой системы управления соединены с блоком питания.
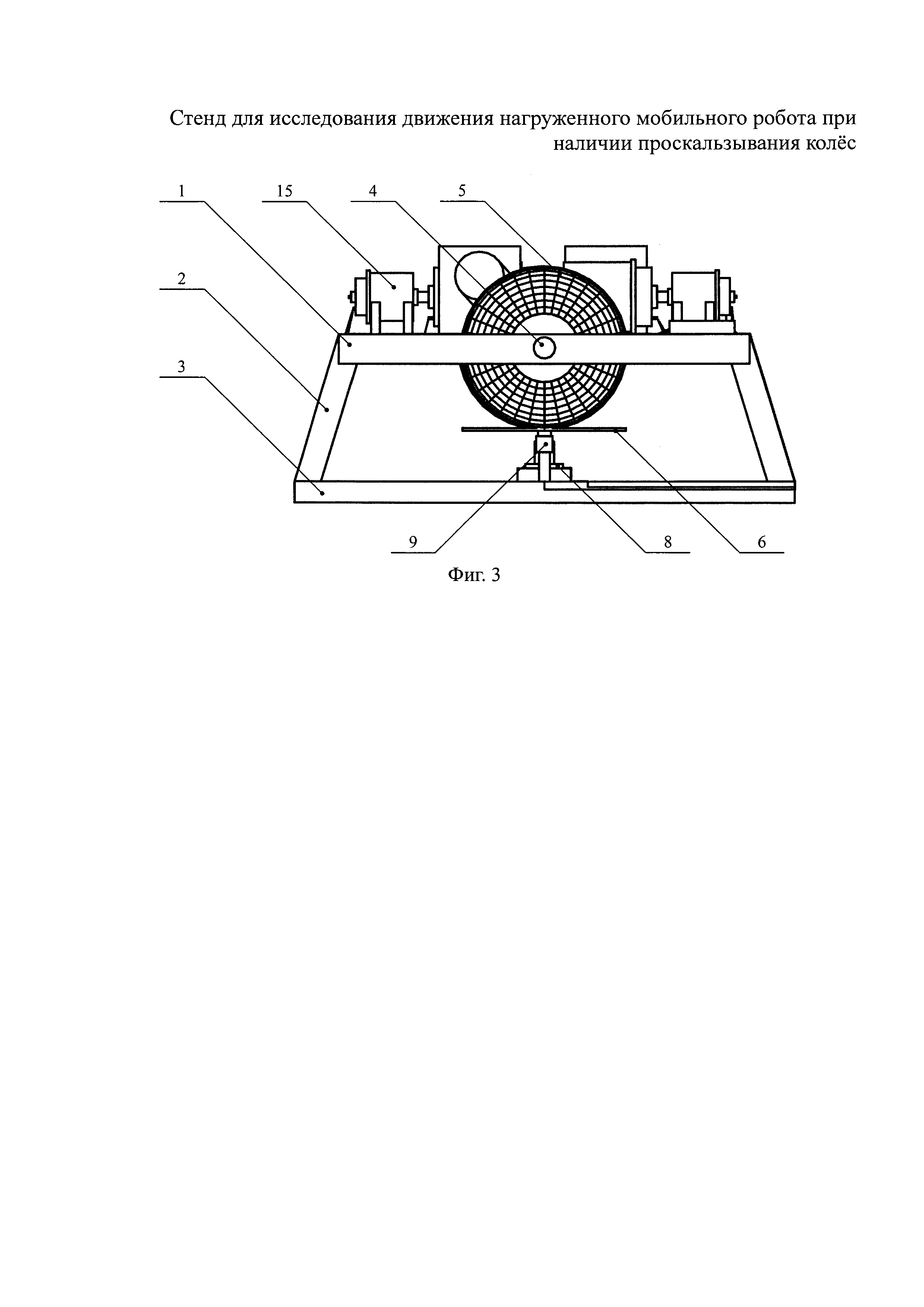
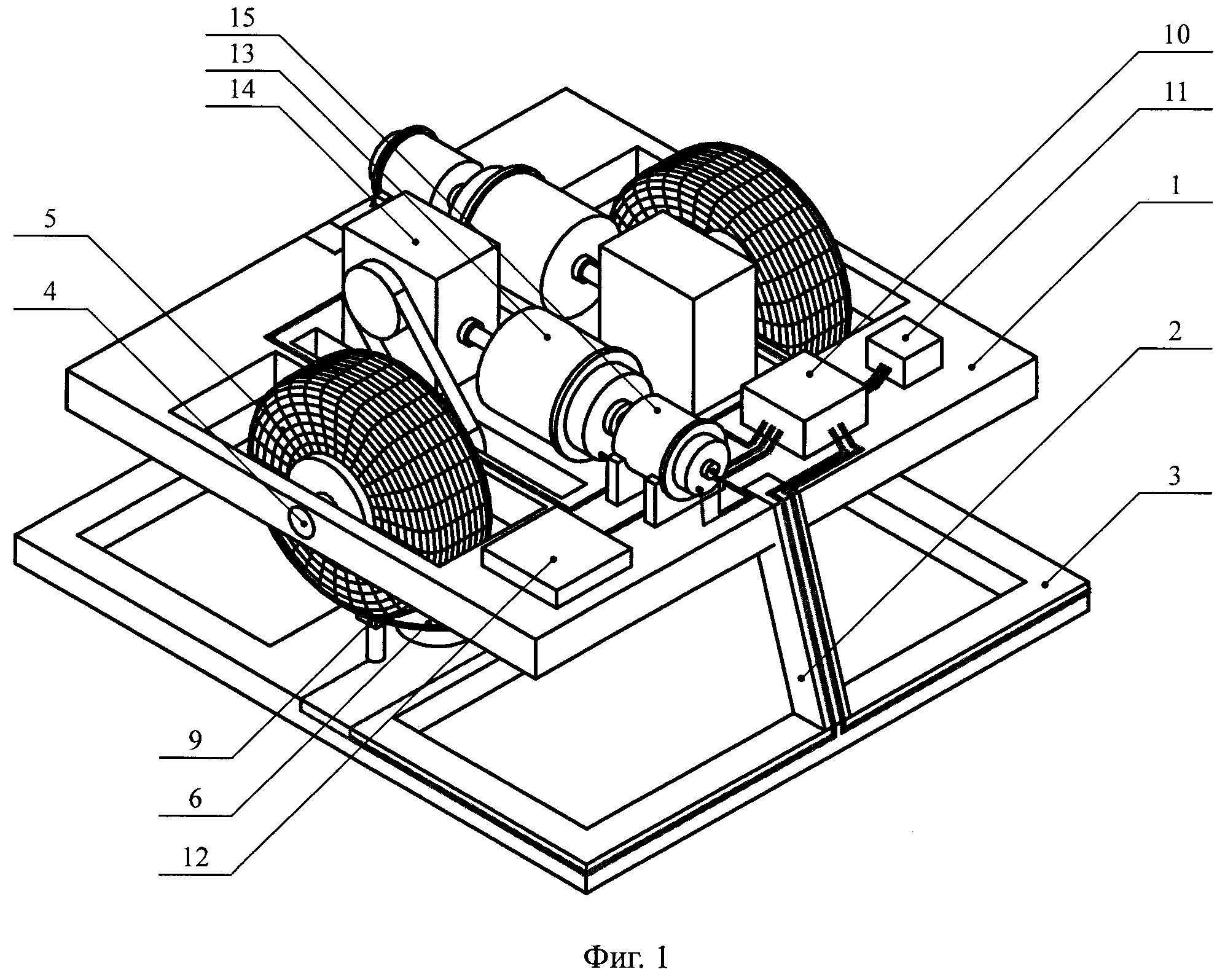
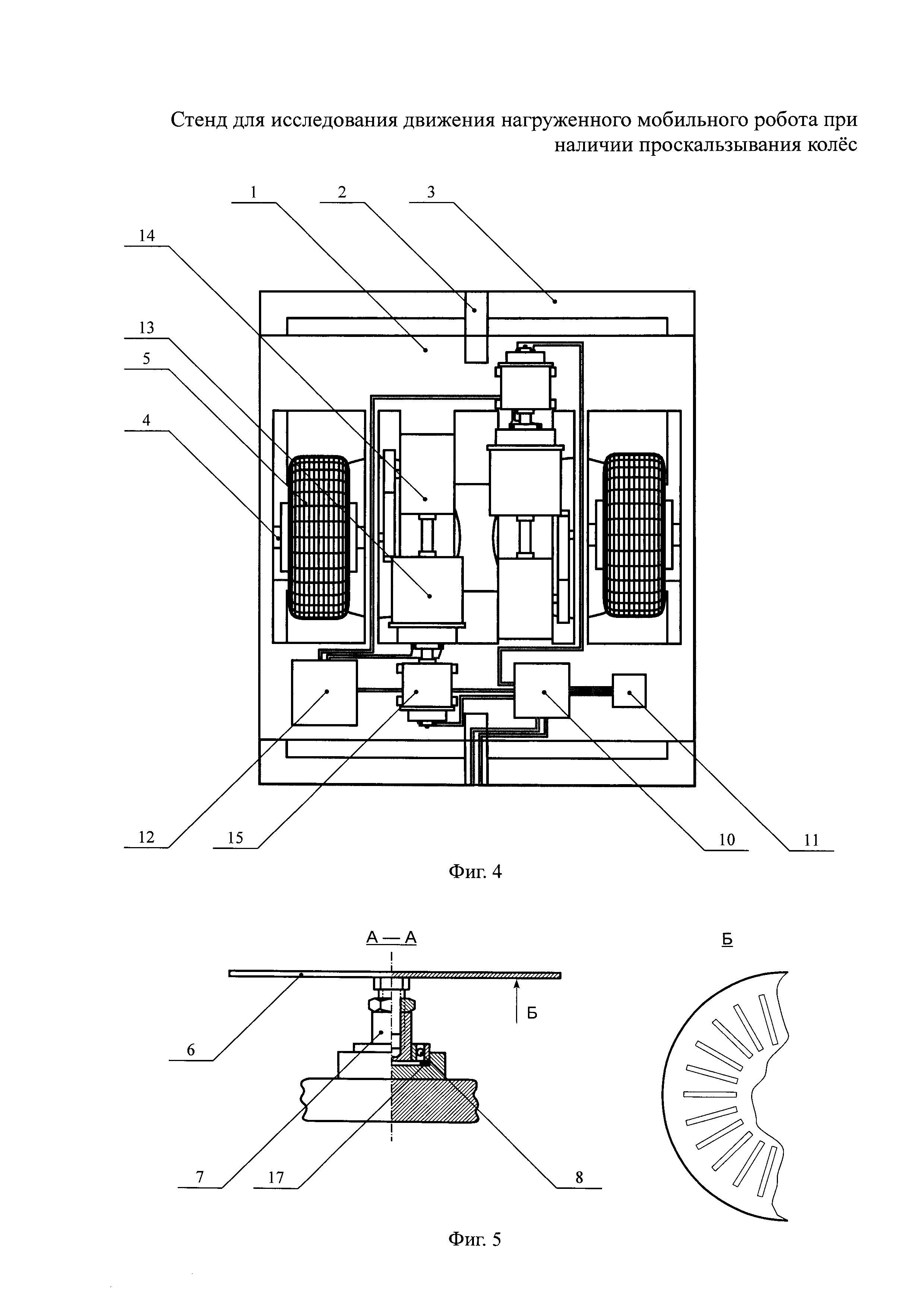
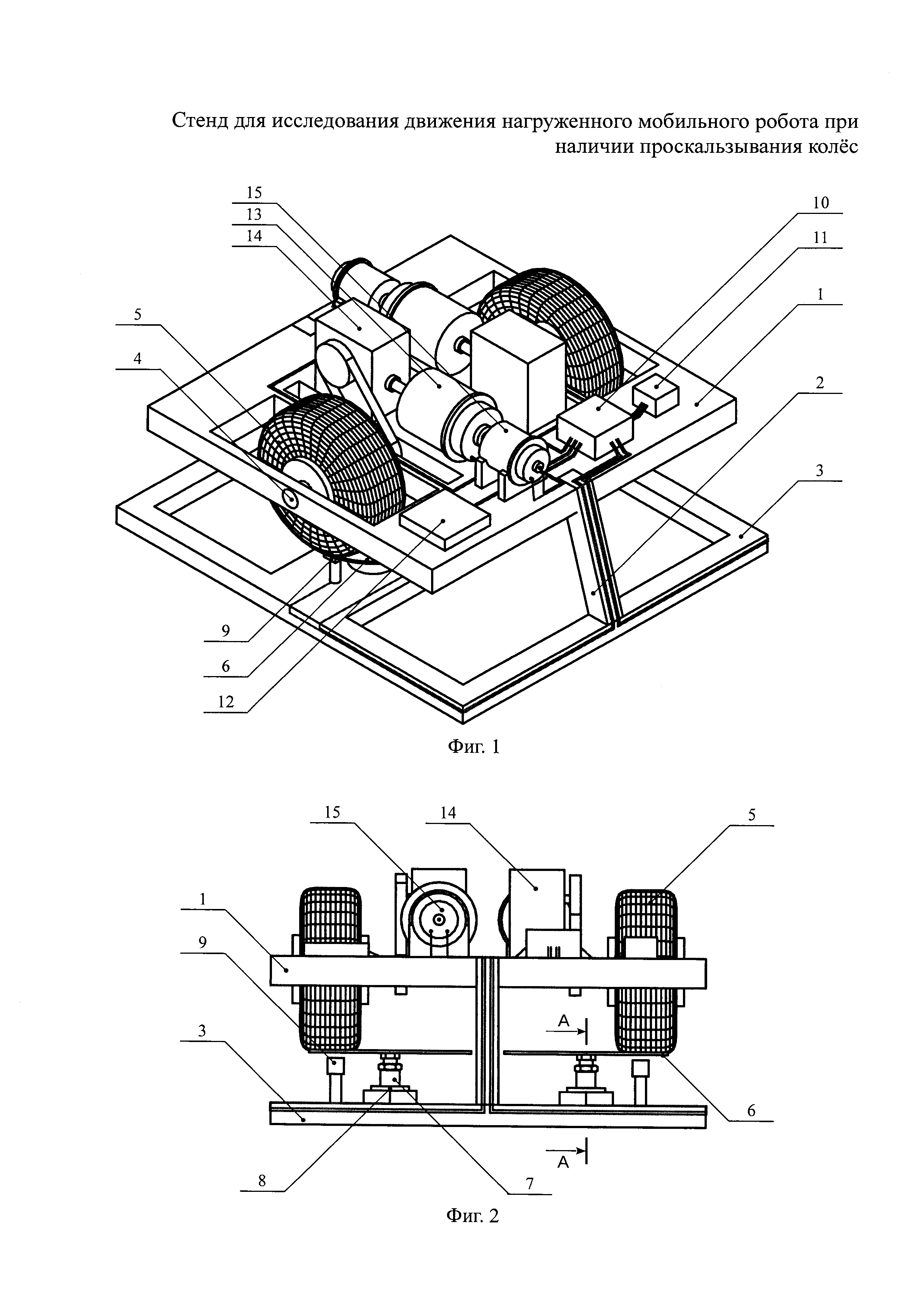
Изобретение поясняется чертежами, где на фиг. 1 показан общий вид стенда, на фиг. 2 - вид спереди, на фиг. 3 - вид сбоку, на фиг. 4 - вид сверху, а на фиг. 5 - соединение круговых платформ с подшипниками.
Стенд состоит из платформы 1, имеющей две опоры в виде наклонных стоек 2, соединенные неподвижно нижними концами с рамой 3, а верхними - с платформой 1. Платформа 1 имеет еще две опоры, расположенные по ромбовидной схеме по отношению к наклонным стойкам 2. Эти две опоры выполнены в виде осей 4 двух приводных колес 5 мобильного робота, которые опираются на круговые платформы 6, закрепленные в своих центрах на вертикальных осях 7. Последние установлены своими нижними концами в опорных подшипниках 8, неподвижно соединенных с рамой 3. Под каждой круговой платформой 6 нанесены по окружности на ее нижней плоскости светоотражательные полоски. На раме под платформами установлены вертикальные стойки, на которых закреплены датчики угловой скорости 9 круговых платформ с выходами, связанными через устройство ввода-вывода 10 с входом бортового контроллера 11, выходы которого соединены также через устройство ввода-вывода 10 и устройство сопряжения 12 с обмотками якорей двигателей постоянного тока 13. Валы двигателей через редукторы 14 соединены с приводными колесами 5 и одновременно жестко связаны с валами тахогенераторов 15 постоянного тока, выходы которых, как и выходы тензодатчиков 17, установленных под опорными подшипниками 8 вертикальных осей 16, соединенных с центрами круговых платформ по схеме винт-гайка с контргайкой, связаны через устройство ввода-вывода 10 с входами бортового контроллера 11. Бортовой контроллер 11 соединен с ПЭВМ верхнего уровня 18, подключенной к компьютерной сети. Все электрические и электронные элементы бортовой системы управления соединены с блоком питания.
Стенд работает по схеме, приведенной на фиг. 6. Платформа 1, имеет четыре опоры в виде двух наклонных стоек 2, соединенных неподвижно нижними концами с рамой 3, а верхними - с платформой 1, и двух осей 4, расположенных по ромбовидной схеме по отношению к наклонным стойкам 2. Бортовой контроллер 11, посредством устройства ввода-вывода 10 через устройство сопряжения 12 осуществляет управление напряжением каждой якорной обмотки, от которого зависит скорость вращения соответствующего двигателя постоянного тока 13. Вращение каждого из двигателей постоянного тока 13 посредством механических соединений валов передается соответствующему тахогенератору 15 постоянного тока и через редуктор 14 оси соответствующего приводного колеса 5, которое опирается на круговую платформу 6 и вращает ее.
Датчики скорости 9 круговых платформ, воспринимают отраженный световой поток от плосок. При этом частота изменения светового потока зависит от скорости вращения платформы 6. Таким образом, сигнал на выходе датчика скорости 9 соответствует скорости вращения соответствующей круговой платформы 6.
Соединение центров круговых платформ 6 с опорными подшипниками 8 по схеме винт-гайка с контргайкой позволяет изменять давление колес мобильного робота на опорные круговые платформы 6, что моделирует различное давление приводных колес 5 на опорную поверхность при изменении массы перевозимого роботом груза. При этом контргайка обеспечивает фиксацию винта относительно гайки-втулки при вращении круговой платформы 6. Нижний конец гайки-втулки, вращается вместе с винтом. Подшипник 8, опирается на тензодатчик 17. Верхняя часть винта является шестигранником, что обеспечивает поворот винта шестигранным ключом относительно гайки-втулки и, как следствие, вертикальное смещение круговой платформы 6. В зависимости от вертикального смещения круговой платформы 6 меняется давление колеса на платформу, а, следовательно, на винт, гайку-втулку, подшипник 8 и, наконец, на тензодатчик 17. Таким образом, имеется возможность поворотом винта относительно гайки-втулки регулировать нагрузку на приводные колеса 5 и измерять ее при помощи тензодатчиков 17.
Сигналы, формируемые датчиками скорости 9 круговых платформ, тензодатчиками 17 и тахогенераторами 15, соответствующие скоростям вращения круговых платформ 6, нагрузкам на них и скоростям вращения двигателей постоянного тока 13, передаются по линиям связи устройству ввода-вывода 10, которое отсылает информацию от датчиков бортовому контроллеру 11. В качестве физической среды передачи электрических сигналов используются соединительные провода.
Графический интерфейс программы, запущенной на ПЭВМ верхнего уровня 18, позволяет задавать траекторию и закон управления движением и отображать виртуальную траекторию, рассчитанную по скорости вращения круговых платформ 6. Также происходит отображение нагруженности мобильного робота, рассчитанной по показаниям тензодатчиков 17, и величины проскальзывания каждого приводного колеса 5, рассчитанной в соответствие с алгоритмом обработки информации по сигналам тахогенератора 15 и датчика скорости 9, т.е. по разности скоростей вращения двигателя 13 и круговой платформы 6. Подключение ПЭВМ верхнего уровня 18 к компьютерной сети позволяет проводить исследование движения мобильного робота удаленно.
Таким образом, расширяются функциональные возможностей стенда за счет учета проскальзывания приводных колес в зависимости от степени нагружения мобильного робота.
Стенд для исследования движения нагруженного мобильного робота при наличии проскальзывания колес, состоящий из платформы, опирающейся на две наклонные стойки, соединенные неподвижно нижними концами с рамой, а верхними - с платформой, имеющей еще две точки опоры, расположенные по ромбовидной схеме по отношению к наклонным стойкам, в виде осей двух приводных колес робота, опирающихся на соответствующие круговые платформы, закрепленные в своих центрах на вертикальных осях, установленных своими нижними концами в опорных подшипниках, неподвижно соединенных с рамой, при этом под каждой круговой платформой с нанесенными по окружности на ее нижней плоскости светоотражательными полосками установлены на вертикальных стойках, закрепленных на раме, датчики угловой скорости круговых платформ с выходами, связанными через устройство ввода-вывода с входом бортового контроллера, выходы которого соединены также через устройство ввода-вывода с обмотками якорей двигателей постоянного тока, соединенных своими валами через редукторы с приводными колесами, и с ПЭВМ верхнего уровня, связанной с компьютерной сетью, отличающийся тем, что с валами двигателей постоянного тока жестко связаны валы тахогенераторов постоянного тока, выходы которых, как и выходы тензодатчиков, установленных под опорными подшипниками вертикальных осей, соединенных с центрами круговых платформ по схеме винт-гайка с контргайкой, связаны через устройство ввода-вывода с входами бортового контроллера, все электрические и электронные элементы бортовой системы управления соединены с блоком питания.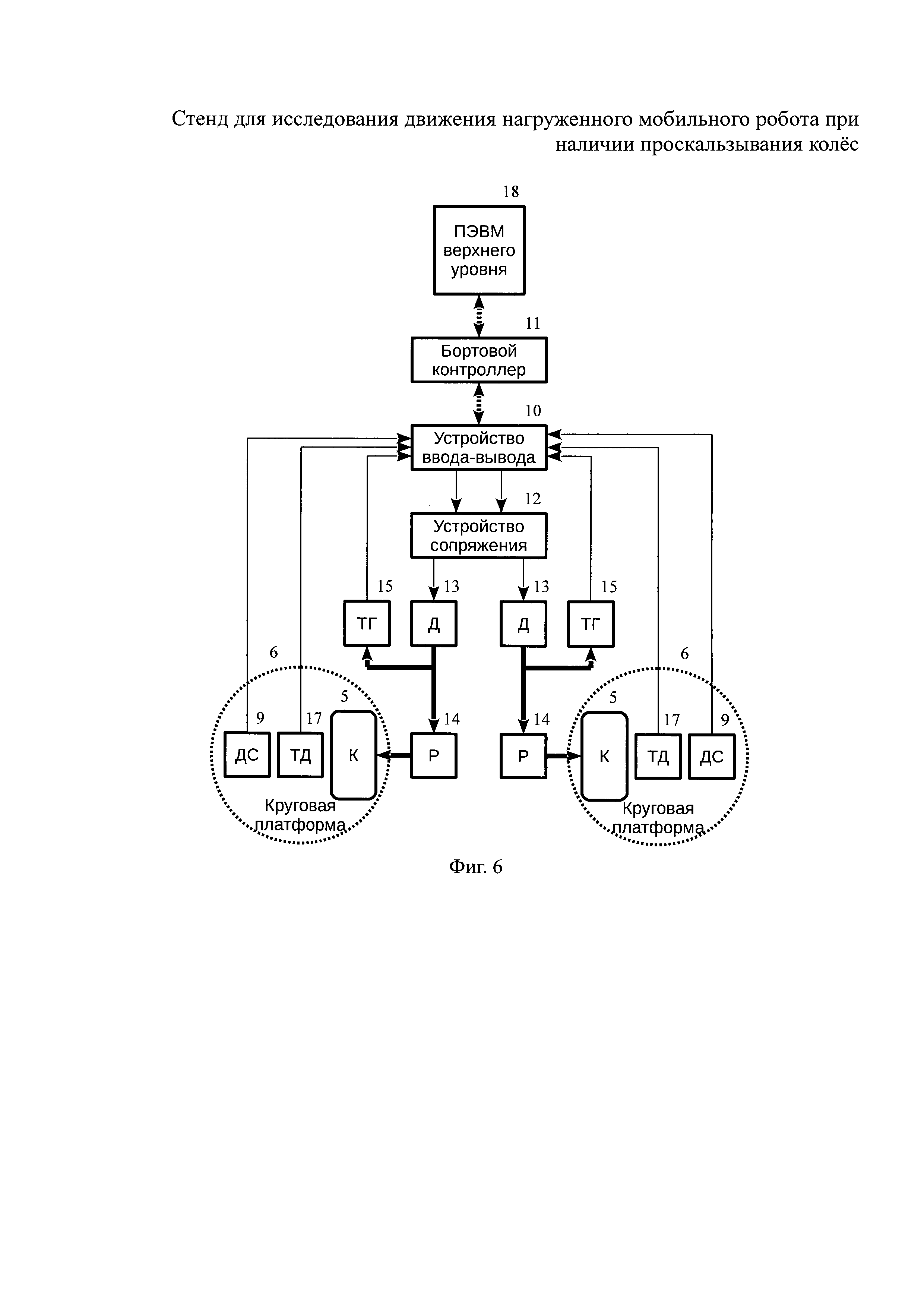
Гидрофобизирующий гранулированный заполнитель на основе кремнеземистого сырья для бетонной смеси, состав бетонной смеси для получения бетонных строительных изделий, способ получения бетонных строительных изделий и бетонное строительное изделие
Дезинтегратор
Дезинтегратор
Устройство регулирования температуры электронагрева
Вибрационный грохот
Смесь для жаростойкого пенобетона на основе наноструктурированного композиционного гипсового вяжущего, способ изготовления изделий
Асфальтобетонная смесь на основе модифицированного битума для устройства покрытий автомобильных дорог
Смесь для жаростойкого пенобетона на основе наноструктурированного композиционного гипсового вяжущего, способ изготовления изделий
Асфальтобетонная смесь на основе модифицированного битума для устройства покрытий автомобильных дорог
Сырьевая смесь и способ получения сырьевой смеси для пеногазобетона неавтоклавного твердения
Способ адаптивного трехпозиционного регулирования
Помольно-смесительный агрегат с автоматической балансировкой
Способ адаптивного двухпозиционного регулирования
Система регулирования температуры электронагрева
Автоматическая система управления движением транспортного средства
Устройство и способ автоматического подавления вибрации помольно-смесительного агрегата
Генератор хаотических колебаний
Стенд и способ исследования движения робокара
Способ автоматического подавления вибрации помольно-смесительного агрегата
Способ идентификации сложного объекта управления дробного порядка

