Результат интеллектуальной деятельности: Радиолокационный способ обнаружения и определения параметров движения маловысотных малозаметных объектов в декаметровом диапазоне радиоволн
Вид РИД
Изобретение
Изобретение относится к области радиолокации, в частности к методам обнаружения и оценки параметров движения маловысотных объектов в разнесенной радиолокации.
Известны различные способы обнаружения и измерения параметров движения маловысотных целей. В [1, 2] предложен способ использования информации о направлении прихода интерференционного сигнала и времени перехода частоты биений этого сигнала через нуль. Пространственные координаты объекта находятся как координаты точки пересечения поверхности постоянной суммы расстояний от передающей позиции до цели и от цели до приемной позиции (поверхность положения) и линии направления на цепь из приемной позиции (линии пеленга).
Указанный способ наиболее близок к предлагаемому по технической сущности и достигаемому результату и поэтому может быть использован в качестве прототипа.
Основные недостатки прототипа:
- увеличение ошибок при приближении цели к линии визирования передатчик- приемник,
- необходимость иметь направленную антенну (что особенно дорого при использовании указанного способа для локации в декаметровом диапазоне волн).
Кроме этого способа, в качестве прототипа может быть использован способ, основанный на локации воздушных объектов ионосферными РЛС [3, 4], которая рассматривается в качестве второго прототипа.
Основные недостатки этого способа:
- недостаточный энергетический потенциал для обнаружения маловысотных малоразмерных целей,
- большие ошибки измерения параметров движения обнаруженных целей (что затрудняет их классификацию).
Целью изобретения является повышение характеристик обнаружения и оценки параметров движения указанного класса целей при приемлемых затратах на его создание.
Степень достижения цели - это устранение отмеченных недостатков.
Предложенный способ позволяет увеличить недостающий потенциал до требуемого уровня за счет:
- приближения приемных позиций к требуемому району контроля,
- использования просветного метода обнаружения, при котором ЭПР цели максимальна,
- увеличения допустимого времени когерентного накопления за счет использования режима внешней когерентности (использования при обработке прямого сигнала от передатчика в качестве опорного),
- согласованной фильтрации при обработке принятых сигналов.
Предлагаемый способ на два порядка повышает точность измерения параметров движения целей, что, в конечном итоге, позволяет надежно оценивать степень опасности обнаруженных целей.
Указанная цель достигается путем создания «просветного РЛК» на базе передающей позиции ионосферной РЛС и двух приемных позиций, расположенных в районе, в котором должен производиться контроль за действиями маловысотных целей. Приемные позиции осуществляют обнаружение целей в пределах прямой видимости в режиме «на просвет» (для маловысотных целей - 15-20 км).
Обнаружение целей и параметров их движения осуществляется за счет использования согласованных с отраженным сигналом ЛЧМ-фильтров и определения моментов пересечения траекторией цели линии визирования.
Сравнение заявленного способа с другими техническими решениями показывает, что отсутствуют технические решения с признаками, сходными с признаками, отличающими указанный способ от прототипов.
Для более полного понимания изложенной сущности заявляемого способа следует обратиться к нижеследующему описанию и чертежам, иллюстрирующим изобретение.
На фиг. 1 представлена взаимосвязь значений составляющих скорости цели и условий наблюдения при двух приемных позициях.
На фиг. 2 представлены частотно-временные свойства сигнала и помехи на интервале времени τкн при пересечении траектории цели линии визирования.
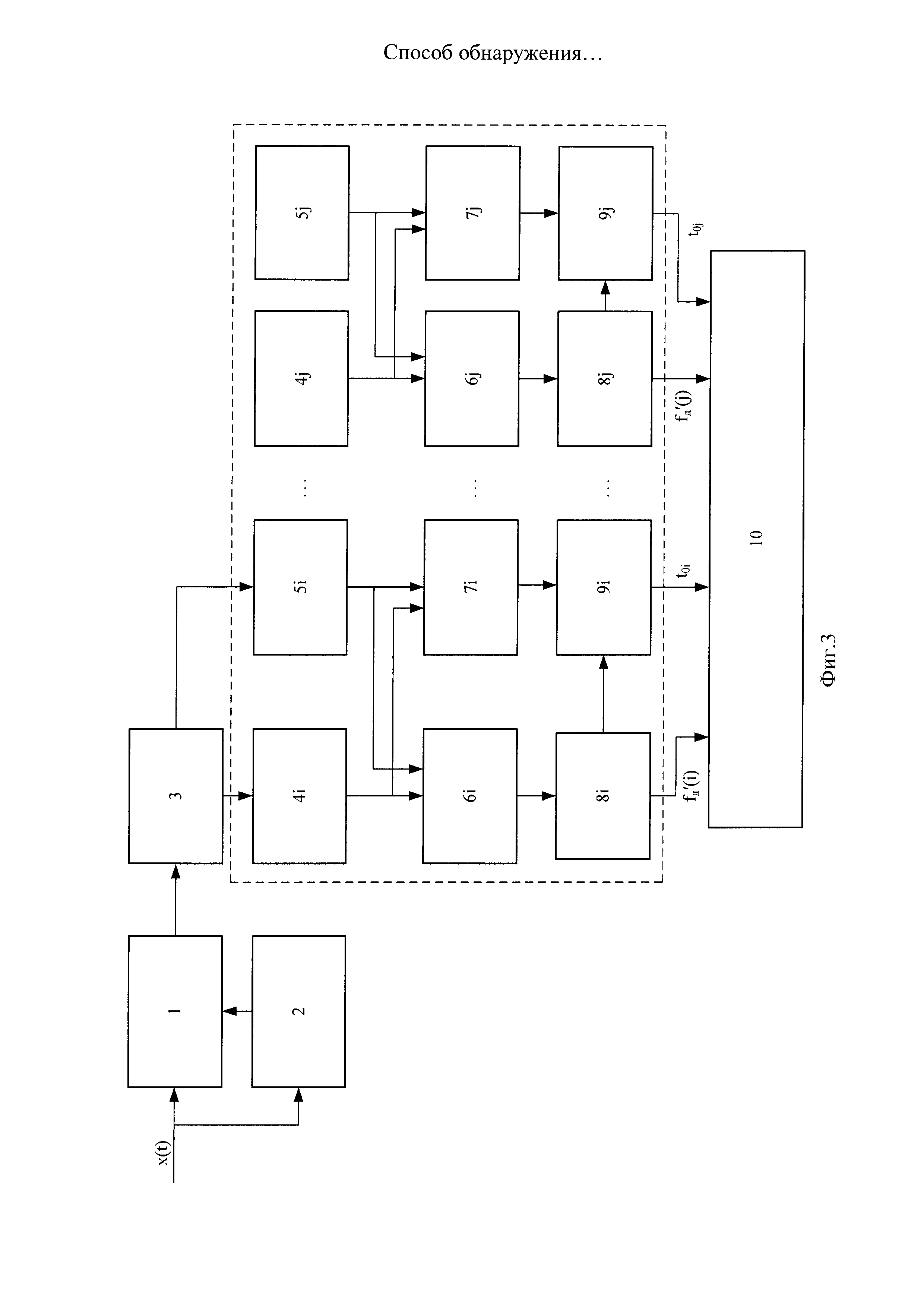
На фиг. 3 представлена блок- схема обнаружителя и оценки параметров (t0 и  ) для максимального сигнала (позиция Пр А0), где обозначено:
) для максимального сигнала (позиция Пр А0), где обозначено:
1 - блок БПФ (быстрого преобразования Фурье);
2 - блок выделения зондирующего сигнала;
3 - блок режекции пассивных помех;
4i,j - блоки согласованных фильтров (полуфильтры «1»);
5 i,j - блоки согласованных фильтров (полуфильтры «0»);
6 i,j - блоки сумматоров;
7 i,j - блоки дискриминаторов;
8 i,j - блоки обнаружителей;
9 i,j - блоки оценки времени перехода границы t-t0;
10 - блок отбора и оценки параметров максимального сигнала.
На фиг. 4 представлена блок-схема алгоритма оценки параметров движения цели, где обозначено:
1 - блок оценки параметра υτ(υy);
2 - блок оценки параметров R01, R11;
3 - блок оценки параметра υх;
4 - блок оценки параметра υ;
t0, t1 - времена пересечения наблюдаемым объектом линий визирования приемных позиций;
Rб - расстояние между приемными позициями;
R01, R11 - соответствующие расстояния между наблюдаемым объектом в момент пересечения первой линии визирования и приемными позициями;
 - параметры сигнала наблюдаемого объекта от каждой приемной позиции в моменты t0, t1.
- параметры сигнала наблюдаемого объекта от каждой приемной позиции в моменты t0, t1.
На фиг. 5 представлена зависимость среднеквадратической ошибки измерения дальности до цели от времени когерентного накопления (τкн) при различных значениях расстояния от точки пересечения целью линии визирования до приемника первой позиции (R11).
На фиг. 6 представлена зависимость среднеквадратической ошибки измерения дальности до цели от расстояния между приемными станциями (Rб) при времени когерентного накопления (τкн) 5 и 10 секунд.
На фиг. 7 представлена зависимость среднеквадратической ошибки измерения путевой скорости цели от времени когерентного накопления (τкн).
На фиг. 8 представлена зависимость среднеквадратических ошибок измерения дальности при различных значениях длины волны передатчика.
При разработке облика комплекса решены следующие задачи.
1. Определены параметры комплекса, которые позволяют получать требуемый для обнаружения малоразмерных целей потенциал РЛС.
2. Определены принципы обработки информации для классификации обнаруженных целей как КР.
Энергетический выигрыш способа определяется отношениями следующих параметров ЗГ РЛС к параметрам предлагаемого комплекса:
- отношением дальностей обнаружения  ;
;
- отношением ЭПР цели при просветной и обычной локации  ;
;
- отношением площадей приемных антенн  ;
;
- выигрышем за счет увеличения времени когерентного накопления (за счет использования внешней когерентности)  .
.
Суммарный выигрыш для комплекса равен νΣ=νrνэνaνнак.
Все коэффициенты могут быть рассчитаны аналитически, кроме отношения ЭПР при просветной и обычной локации, конкретное значение которого требует проведения экспериментальных работ.
Для оговоренных выше условий и принятых значениях νr=4⋅104, νн=6, νa=10-3, суммарный выигрыш для комплекса равен νΣ=240νэ, что обеспечивает надежное обнаружение маловысотных и малозаметных целей.
Для разработки принципов обнаружения сигналов от целей и оценки параметров движения рассмотрена взаимосвязь значений составляющих скорости цели с условиями наблюдения.
Для маловысотных целей предельная дальность обнаружения определяется известным выражением

Расстояние до таких целей будет небольшим, поэтому и расстояние между приемными позициями должно быть небольшим.
Взаимосвязь значений составляющих скорости цели и условий наблюдения при двух приемных позициях представлена на фиг. 1.
Цель движется под углом α к линии визирования, ее траектория пересекает линию визирования (Пер А - Пр A1) в точке В1, удаленной от Пр А1 на расстояние R11. Скорость цели равна υ.
Частотно-временные свойства сигнала от цели и помехи представлены на фиг. 2.
На первой приемной позиции доплеровское смещение сигнала от цели в точке В1 равно 0, а частотная модуляция сигнала, за счет тангенциальной составляющей, определяется выражением

Формульные зависимости для определения доплеровского смещения и частотной девиации на позициях Пр А1 и Пр А0 в момент времени t1, когда цель находится в точке В1, представлены в (3-6):
1. fд1(t1)=0,  - измерения на первой позиции, когда цель находится в точке В1
- измерения на первой позиции, когда цель находится в точке В1

2. fд0 (t1),  - измерения на тот же момент времени на позиции Пр А0
- измерения на тот же момент времени на позиции Пр А0



Мы получили четыре уравнения с четырьмя неизвестными υ, α, ψ, R11, решение которых можно получить известными численными методами.
Таким образом, при пересечении в точке B1 целью линии визирования можно оценить все параметры движения цели, а имея вторую приемную позицию оценить и направление ее движения.
Из приведенных выше формул следует, что в общем случае принимаемый на приемных позициях сигнал включает в себя два закона изменения фазы: линейный, вызванный радиальным перемещением цели, и квадратичный, вызванный тангенциальной составляющей скорости. Для согласованной фильтрации таких сигналов в общем случае необходима система ЛЧМ-фильтров в двумерном пространстве (fд, df/dt) (фиг. 2).
Поиск оптимального фильтра, соответствующего принимаемому сигналу, достаточно сложная процедура. Задача упрощается, когда цель на интервале анализа движется равномерно и прямолинейно. В этом случае можно при ее решении использовать информацию о пересечении целью каждой линии визирования и привести задачу к поиску оптимального фильтра в одномерном пространстве (fд=0, df/dt).
При двух приемных позициях вводится общая для них система координат. Возьмем прямоугольную систему координат с центром на позиции Пр А0, ось ординат направим на вторую приемную позицию Пр А1, ось абсцисс на передающую позицию Пер А.
На моменты пересечения траекторией цели соответствующих линий визирования выполняется условие

где: t0 - оценка момента времени пересечения целью линии визирования Пер А - Пр А0 (по результатам обнаружения сигнала в соответствующем доплеровском фильтре);
t1 - оценка момента времени пересечения целью линии визирования Пер А - Пр A1 (по результатам обнаружения сигнала в соответствующем доплеровском фильтре);
Rб - расстоянии между приемными позициями.
Дальность до цели от приемной позиции Пр А0 в момент пересечения соответствующей линии визирования

где  - оценка частотной девиации сигнала (на основании параметров фильтра, в котором произошло обнаружение сигнала при fд=0 на позиции Пр А0).
- оценка частотной девиации сигнала (на основании параметров фильтра, в котором произошло обнаружение сигнала при fд=0 на позиции Пр А0).
Скорость цели вдоль оси 0х определяется соотношением

Как было отмечено выше, при пересечении целью линии визирования доплеровское смещение сигнала от цели равно нулю (падающая и отраженная волна имеют одинаковый по величине и противоположный по знаку набег фазы), а частотная девиация сигнала от цели определяется выражением (2).
Для согласованной фильтрации такого сигнала надо иметь два фильтра одинаковыми по величине частотной девиации, но разными начальными частотами Доплера. В связи с тем, что полоса сигнала для рассматриваемого случая включает в себя и область пассивных помех, то необходима режекция сигналов в полосе Δfp в области fд=0. Указанные фильтры будут собирать сигналы в полосе Δfд1 и Δfд2 соответственно. Сигналы с выхода этих фильтров суммируются когерентно (с учетом фазы, определяемой временным сдвигом сигналов). Решение о пересечении линии визирования принимается по максимальному значению сигнала в двумерной области (время - частотная девиация). Эта процедура реализуется с помощью дискриминатора, на вход которого подаются сигналы с двух указанных выше фильтров. Блок-схема обнаружителя и оценки параметров (t0 и  ) для максимального сигнала на первой приемной позиции (Пр А1 на фиг. 1) представлена на фиг. 3. Для нулевой приемной позиции (Пр А0 на фиг. 1) блок-схема обнаружителя и оценки параметров будет такой же, как на фиг. 3.
) для максимального сигнала на первой приемной позиции (Пр А1 на фиг. 1) представлена на фиг. 3. Для нулевой приемной позиции (Пр А0 на фиг. 1) блок-схема обнаружителя и оценки параметров будет такой же, как на фиг. 3.
Информация с выходов блоков отбора максимального сигнала обнаружителей обеих приемных позиций (t0, t1, ) поступает на вход блока алгоритма оценки параметров движения цели.
Блок-схема алгоритма, позволяющего провести оценку параметров движения цели на основе приведенных выше формул, представлена на фиг. 4.
На выходе блока 4 получаем оценку полного вектора скорости цели.
Рассмотрим ошибки измерения дальности предлагаемого комплекса до цели.
При наличии частотной девиации принимаемых сигналов дальность до цели может быть определена с помощью выражений (7) и (8).
Дисперсию ошибок измерения дальности до цели можно определить методом линеаризации

При этом



где: q - отношение сигнал/шум,
 - дисперсия оценки момента пересечения целью линии визирования. Для ее вычисления требуется задаться отношением сигнал/шум (для построения зависимостей, приведенных на фиг. 3, принято q2=100).
- дисперсия оценки момента пересечения целью линии визирования. Для ее вычисления требуется задаться отношением сигнал/шум (для построения зависимостей, приведенных на фиг. 3, принято q2=100).
Результаты измерений среднеквадратических ошибок комплекса по дальности и скорости, полученные в среде математического моделирования MathLab, представлены на фиг. 5-8.
Из графика (фиг. 5) следует, что даже при времени когерентного накопления порядка от 3 до 5 секунд значения среднеквадратической ошибки измерения по дальности предлагаемого комплекса до цели на два-три порядка меньше по сравнению со значениями среднеквадратической ошибки измерения по дальности РЛС ЗГО. При времени когерентного накопления более 10 секунд значения среднеквадратической ошибки измерения по дальности практически не меняются.
Из графика (фиг. 6) следует, что при Rб≥10000 м среднеквадратические ошибки измерения по дальности практически постоянны.
Из графика (фиг. 7) следует, что при τкн=10 с среднеквадратическая ошибка измерения путевой скорости (συ) равна примерно 0,45 м/с. Полученная оценка среднеквадратической ошибки измерения путевой скорости предлагаемого комплекса на два порядки меньше среднеквадратической ошибки измерения путевой скорости РЛС ЗГО, что позволяет достаточно точно определить скорость полета цели и совместно с признаком малой высоты траектории полета идентифицировать ее как крылатую ракету.
Из графика (фиг. 8) следует, что при увеличении длинны волны характеристики измерителя значительно улучшаются.
Признак того, что цель летит на малой высоте, может быть получен косвенно по длительности получения сигнала от цели (короткая траектория).
Рассмотрим изменение f' в зависимости от расстояния до цели (при пересечении линии визирования) для различных длин волн (таблица 1).

Частотная девиация сигнала за время когерентного накопления определяется выражением ΔF=f'τкн.
В зависимости от соотношения ΔF и 
влияние частотной девиации различно. Так при времени когерентного накопления равного 1 сек, влияние девиации проявляется на дальностях менее 5 км в коротковолновой части диапазона. При времени когерентного накопления 10 сек влияние существенно на дальностях до 20 км во всем диапазоне частот. Не рассматривая другие факторы, влияющие на эффективность метода, можно в первом приближении считать, что время когерентного накопления в интересах решения задачи обнаружения маловысотных целей должно быть порядка 10 сек.
Источники информации, принятые во внимание при составлении описания:
1. Радиолокационный способ определения параметров движения объекта. RU 2133480, 20.07.1999.
2. Радиолокационный комплекс. RU 2324197, 20.02.2006.
3. Радиоэлектронные системы Основы построения и теория. Справочник под редакцией Я.Д. Ширмана. Москва «Радиотехника» 2007 г.
4. Акимов В.Ф., Калинин Ю.К. Введение в проектирование ионосферных загоризонтных радиолокаторов. ОАО «НИИ ДАР» г. Москва 2012 г.


Способ и устройство акустического обнаружения и распознавания летательных аппаратов
Дезинтегратор
Дезинтегратор
Кадрирующая рамка для оптико-электронного устройства сканирования и копирования
Дезинтегратор
Дезинтегратор
Дезинтегратор
Дезинтегратор
Дезинтегратор
Дезинтегратор
Дезинтегратор

