Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Область техники
Изобретение относится к акустическим пеленгационным системам и может быть использовано для обнаружения и распознавания летательных аппаратов (ЛА), движущихся в приземных слоях атмосферы с дозвуковой скоростью.
Уровень техники. Известны способы и устройства акустического обнаружения и распознавания летательных аппаратов [1…11], заключающийся в приеме акустического излучения от летательных аппаратов (ЛА), сравнении амплитуды принятого сигнала от ЛА с уровнем фона (шумов атмосферы и акустического приемника), отборе сигналов, превышающих уровень фона, преобразовании амплитудно-временных характеристик отобранных сигналов в спектральные сигналы методом Фурье-преобразования, сравнения полученного спектра с библиотекой спектров ЛА и принятие решения об обнаружении ЛА конкретного типа.
Наиболее близким по назначению и технической сущности к заявленному изобретению относится способ и устройство акустического обнаружения и распознавания летательных аппаратов [2].
Согласно [2] способ акустического обнаружения и распознавания летательных аппаратов заключается в многоканальном приеме акустического излучения от летательных аппаратов (ЛА), низкочастотной фильтрации принятых сигналов каждого канала в диапазоне акустического спектра излучений требуемых типов ЛА, совместной корреляционной обработке (сложении совпадающих по амплитудно-временным характеристикам) отфильтрованных сигналов для формирования взаимной корреляционной функции (ВКФ), сравнении максимального значения «Zмах» амплитуды ВКФ с порогом «Zпор» (уровнем шумового фона) для обнаружения ЛА с заданной вероятностью, отборе сигналов ВКФ, превышающих пороговый уровень фона, преобразовании амплитудно-временных характеристик отобранных сигналов в спектральные сигналы методом Фурье-преобразования, сравнении полученного спектра с библиотекой спектров ЛА и принятии решения об обнаружении ЛА конкретного типа.
При этом значение порога Zпор обнаружения ЛА выбрано фиксированным исходя из среднего значения уровня атмосферных шумов в районе расположения акустических приемников.
Устройство акустического обнаружения и распознавания летательных аппаратов, реализующее известный способ [2], содержит акустическую антенную решетку из микрофонов, соединенных через канальные усилители и аналоговые низкочастотные фильтры с аналого-цифровым преобразователем (АЦП). Выход АЦП через цифровое устройство корреляционной обработки сигналов, цифровое пороговое устройство и цифровое устройство распознавания ЛА по виду его спектра соединен с индикаторным устройством и радиомодемом для связи с внешним потребителем акустической пеленгационной информации.
Недостатком данного способа и устройства акустического обнаружения и распознавания ЛА является низкая достоверность акустического обнаружения, связанная с высоким уровнем и нестабильностью внешних шумов по сравнению с полезным сигналом.
Это связано с тем, что шумовой фон атмосферы в акустическом диапазоне длин волн может значительно превышать мощность полезного сигнала от ЛА, а его абсолютный уровень отличается высокой временной нестабильностью.
При этом обнаружение ЛА, реализованное в известном способе и устройстве, основанное на использовании регистрации превышения уровня ВКФ фиксированного порога обнаружения не позволяет обеспечить достаточную достоверность обнаружения ЛА на реальном быстроменяющемся шумовом фоне атмосферы.
Задачей изобретения является повышение достоверности акустического обнаружения ЛА, а техническим результатом, обеспечивающим решение этой задачи - снижение уровня ложных тревог, вызванных атмосферными шумами.
Изобретение стало возможным благодаря экспериментальным исследованиям авторов по исследованиям факторов, влияющих на спектр атмосферных шумов и выделении на их фоне спектров полезных сигналов, характерных для ЛА. При этом выявлено, что основным источником мощных акустически помех для акустических пеленгаторов является ветер. В данном изобретении учет этого фактора позволил существенно улучшить характеристики акустических пеленгаторов и способов их использования.
Сущность изобретения
Для достижения заявленного технического результата и решения поставленной задачи способ акустического обнаружения и распознавания летательных аппаратов, включающий многоканальный прием акустического излучения от летательных аппаратов (ЛА), фильтрацию принятых сигналов каждого канала в диапазоне акустического спектра излучений ЛА, корреляционную обработку отфильтрованных сигналов и формирование взаимной корреляционной функции (ВКФ), сравнение максимального значения амплитуды ВКФ с порогом обнаружения ЛА, отбор сигналов ВКФ, превысивших порог обнаружения, определение пеленга на цель по временному сдвигу максимума ВКФ, преобразование амплитудно-временных характеристик отобранных сигналов в спектральные сигналы методом Фурье-преобразования, сравнение полученного спектра с библиотекой спектров ЛА и принятие решения об обнаружении ЛА конкретного типа.
Согласно изобретению, в данном способе дополнительно измеряют скорость ветра, определяют на основе измеренной скорости реальное значение дисперсии атмосферных шумов, на основе реального значения дисперсии рассчитывают и вводят поправку в численное значение нижней частоты фильтрации акустических сигналов и - в численное значение порога обнаружения ЛА.
Устройство акустического обнаружения и распознавания летательных аппаратов, реализующее предложенный способ, содержит акустическую антенную решетку из микрофонов, соединенных через канальные усилители с блоком аналого-цифровых преобразователей (АЦП), выходы которых через цифровое устройство корреляционной обработки сигналов, цифровое пороговое устройство и цифровое устройство спектрального распознавания ЛА соединены с индикаторным устройством и радиомодемом для связи с внешним потребителем акустической пеленгационной информации.
Согласно изобретению устройство дополнительно содержит блок цифровых фильтров высоких частот (ФВЧ) с управляемой полосой пропускания, блок расчета нижней границы полосы пропускания ФВЧ, блок расчета дисперсии атмосферных шумов, зависящих от скорости ветра, блок расчета адаптивного значения порога обнаружения ЛА и датчик ветра, соединенный через блок расчета дисперсии атмосферных шумов, блок расчета нижней границы полосы пропускания цифрового фильтра высоких частот с цифровыми фильтрами высоких частот и через блок расчета адаптивного значения порога обнаружения ЛА - со вторым входом порогового устройства, первый вход которого через цифровое устройство корреляционной обработки сигналов и блок цифровых ФВЧ соединен с соответствующими канальными АЦП.
Введение указанных отличий в способ и устройство акустического обнаружения и распознавания ЛА позволяет блокировать прием мощных низкочастотных шумов атмосферы, вызванных ветром, путем соответствующего сужения полосы пропускания цифровых фильтров.
Это позволяет увеличить амплитуду ВКФ на фоне шумов при корреляционной обработке сигналов. В результате увеличивается достоверность обнаружения ЛА на фоне уменьшенных атмосферных шумов и снижается вероятность ложных тревог в пороговом устройстве.
Применение при этом в пороговом устройстве адаптивного порога обнаружения ЛА, зависящего от скорости ветра, дополнительно позволяет уменьшить ложные срабатывания порогового устройства за счет увеличенной разности значений сигналов на входах порогового устройства.
Следствием указанных технических преимуществ является достижение заявленного технического результата и решение поставленной задачи, заключающихся в снижении уровня ложных тревог, вызванных атмосферными шумами, и в увеличении достоверности акустического обнаружения ЛА на фоне мощных атмосферных помех.
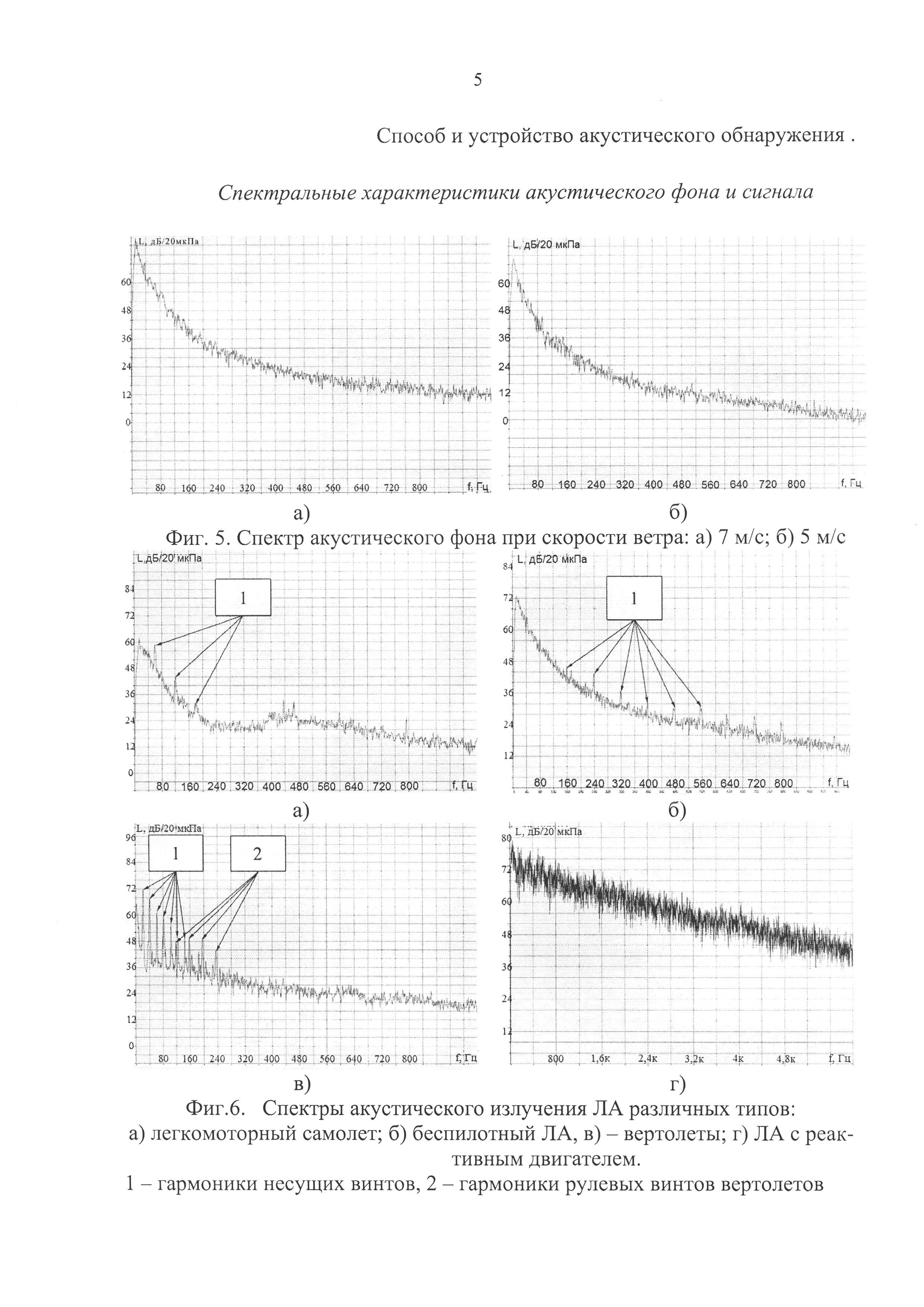
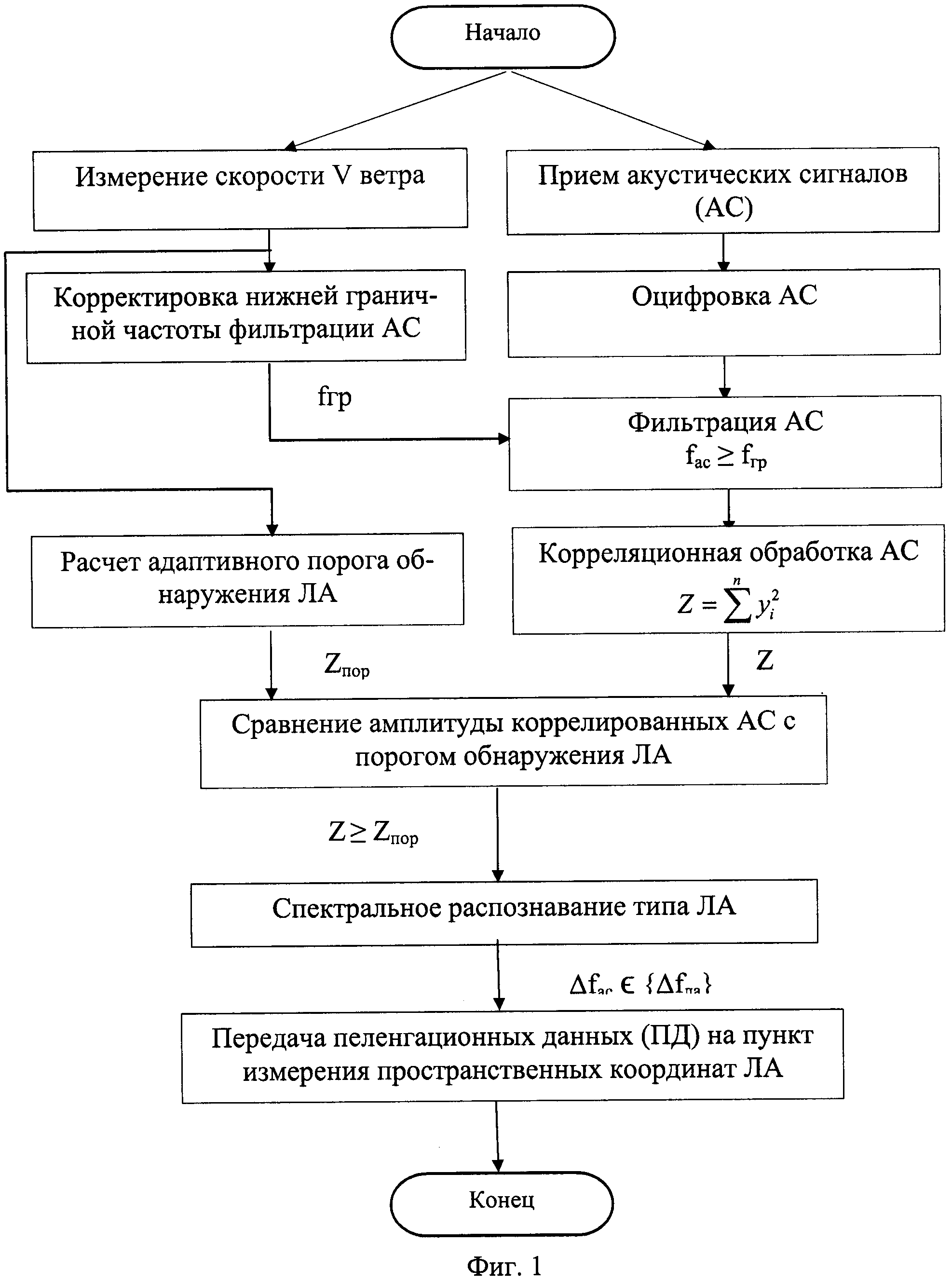
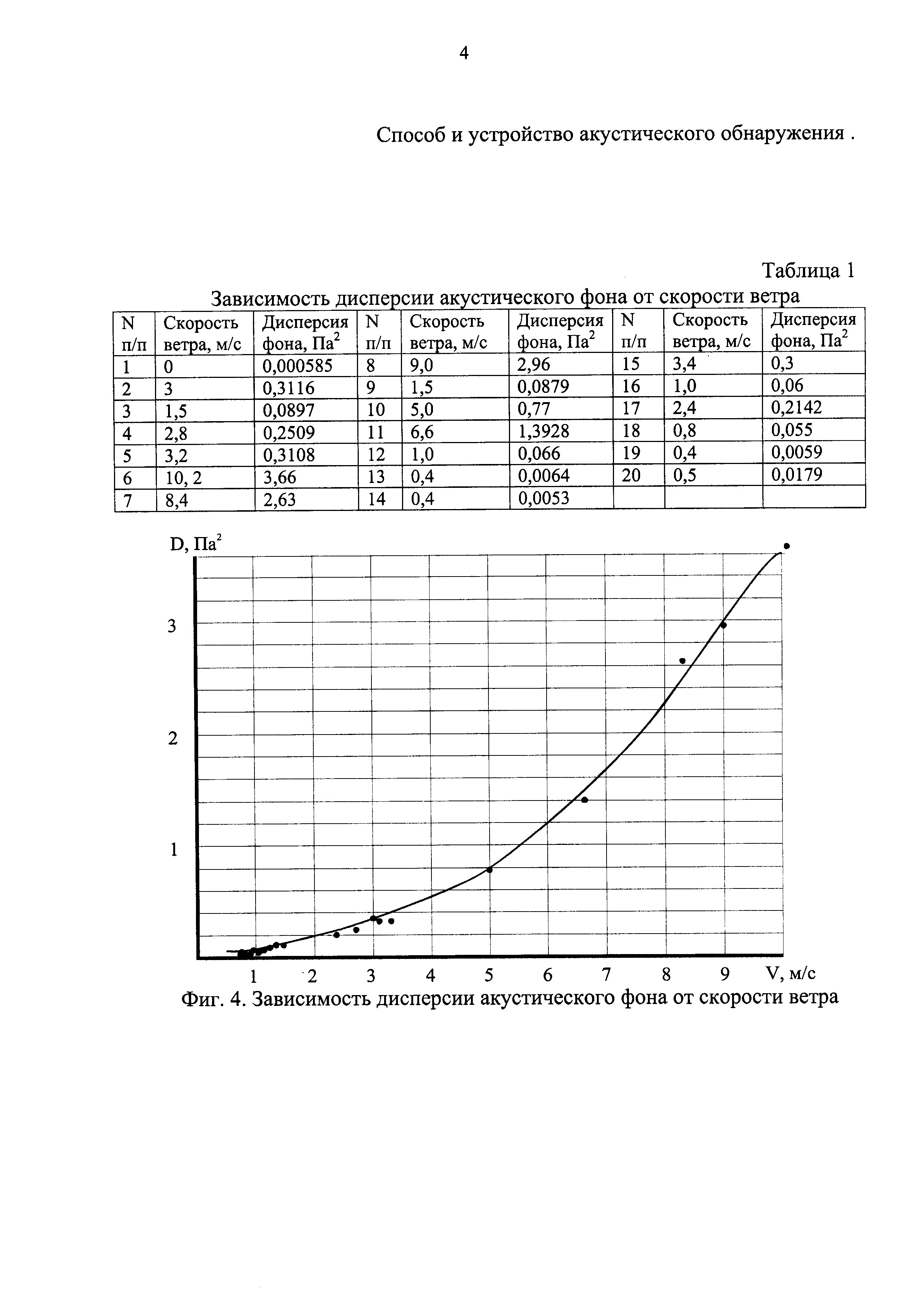
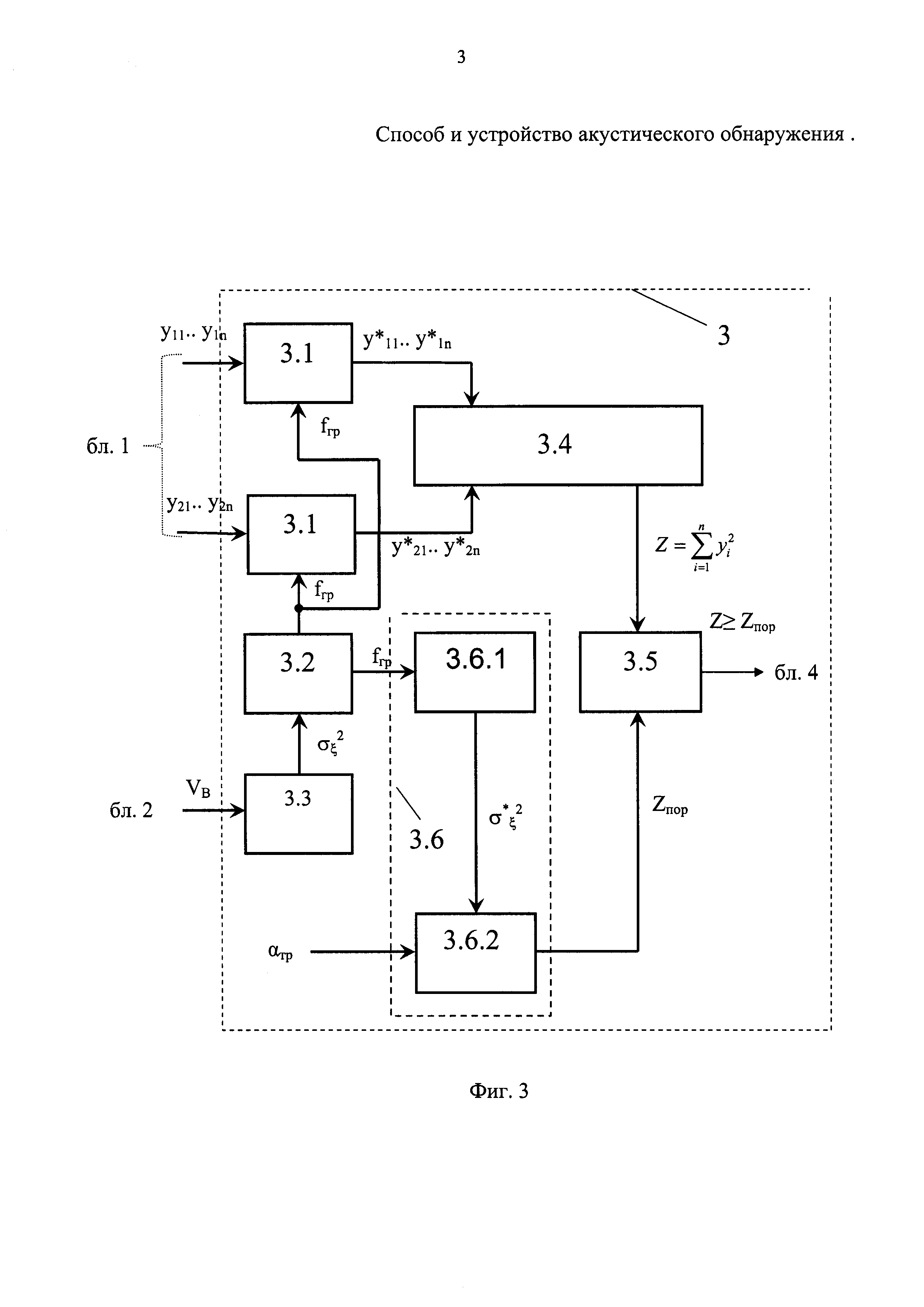
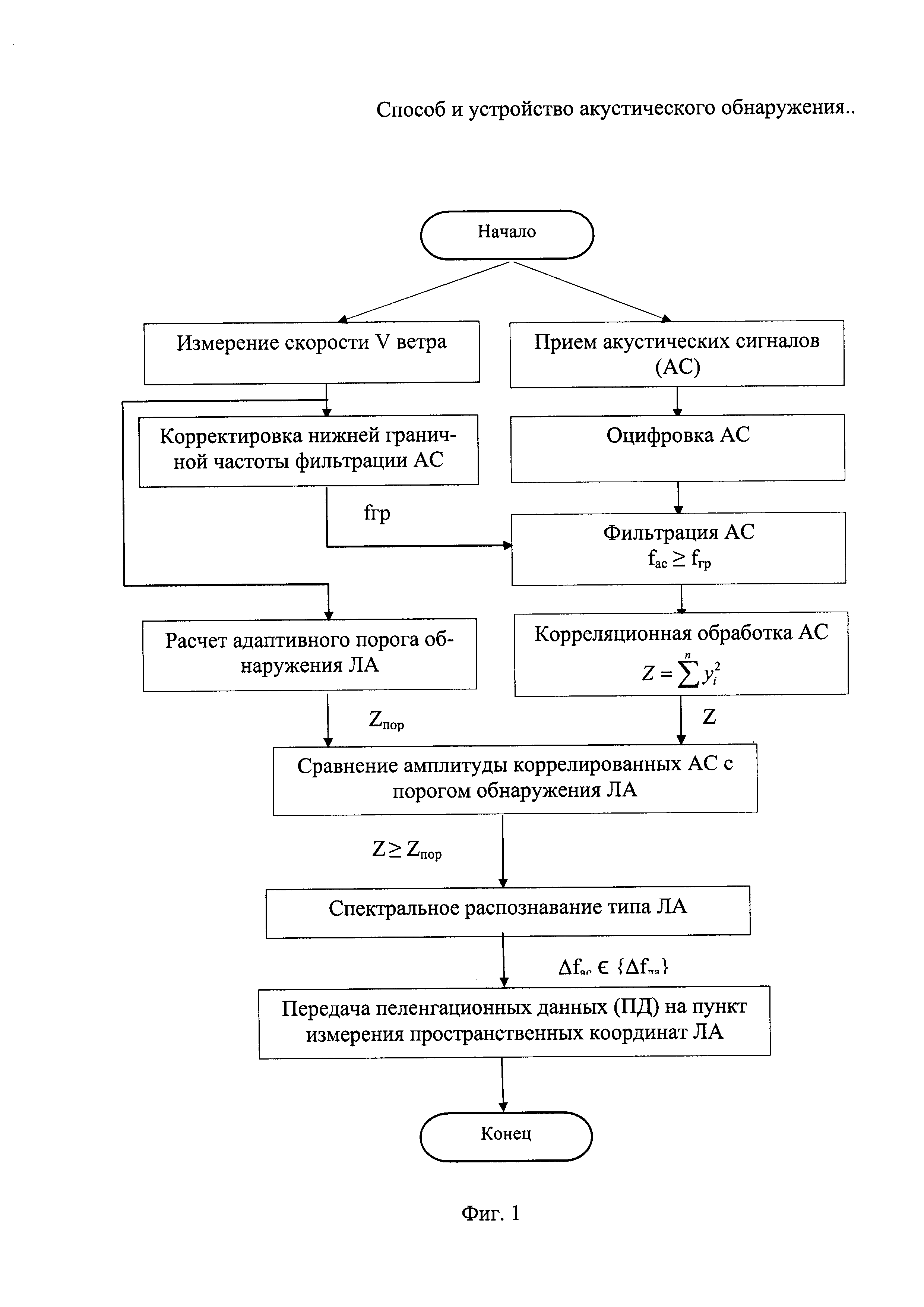
Ссылка на чертежи. На фиг. 1 представлен алгоритм акустического обнаружения и распознавания летательных аппаратов на основе измерений скорости ветра V, на фиг. 2 - функциональная схема устройства, реализующая предлагаемый способ акустического обнаружения и распознавания летательных аппаратов, на фиг. 3 - функциональная схема двухканального обнаружителя акустических сигналов, на фиг. 4 - зависимость дисперсии акустического фона от скорости ветра V в табличном и графическом изображении, на фиг. 5 - спектр акустического фона при скорости ветра: а) 7 м/с; б) 5 м/с, на фиг. 6 - спектры акустического излучения ЛА различных типов: а) легкомоторный самолет; б) беспилотный ЛА, в) вертолет; г) ЛА с реактивным двигателем, на фиг. 7 - принцип спектрального подавления мощных акустических шумов, зависящих от скорости ветра V, на фиг. 8 - рисунок, поясняющий эффективность подавления шумов ветра со скоростью V=9.2 м/с (адаптивный порог фильтрации fгр=30 Гц).
Раскрытие сущности изобретения
Способ акустического обнаружения и распознавания летательных аппаратов включает многоканальный прием полезных сигналов - акустического излучения (фиг. 6) от летательных аппаратов (ЛА) на фоне (фиг. 5) акустических атмосферных шумов и собственных шумов акустических приемников в диапазоне частот до 10 кГц. Одновременно с приемом полезных сигналов измеряют мгновенную скорость ветра V. На основе измеренной мгновенной скорости V из известной зависимости  (фиг. 4) определяют дисперсию D атмосферных шумов, где, где σξ - среднеквадратическое отклонение акустического шума. Нижнюю граничную частоту fгр цифровой фильтрации принятого сигнала определяют из условия обеспечения требуемого отношения сигнал/шум на входе цифрового коррелятора. Повышение отношения сигнал/шум при фильтрации обусловлено разницей ширины спектра фона (до 300 Гц) и сигналов от ЛА (5-10 кГц). При этом дисперсия акустического шума уменьшается до значения
(фиг. 4) определяют дисперсию D атмосферных шумов, где, где σξ - среднеквадратическое отклонение акустического шума. Нижнюю граничную частоту fгр цифровой фильтрации принятого сигнала определяют из условия обеспечения требуемого отношения сигнал/шум на входе цифрового коррелятора. Повышение отношения сигнал/шум при фильтрации обусловлено разницей ширины спектра фона (до 300 Гц) и сигналов от ЛА (5-10 кГц). При этом дисперсия акустического шума уменьшается до значения  , где
, где  - среднеквадратическое отклонение акустического шума после фильтрации. После формирования сигнала ВКФ определяют максимальное значение его амплитуды Zmax и сравнивают его с пороговым значением Zпор. Численное значение Zпор зависит от уровня акустических шумов после фильтрации (D*) и заданной вероятности а ложной тревоги по обнаружению ЛА.
- среднеквадратическое отклонение акустического шума после фильтрации. После формирования сигнала ВКФ определяют максимальное значение его амплитуды Zmax и сравнивают его с пороговым значением Zпор. Численное значение Zпор зависит от уровня акустических шумов после фильтрации (D*) и заданной вероятности а ложной тревоги по обнаружению ЛА.
При превышении значения полезного сигнала Zmax≥Zпор принимается решение об обнаружении ЛА. Определение пеленга на цель осуществляется по временному сдвигу максимума ВКФ. Распознавание обнаруженного ЛА осуществляется путем сравнения спектра акустического излучения ЛА с библиотекой спектров типовых летательных аппаратов (фиг. 6). При этом дополнительной информацией для распознавания может быть скорость цели и уровень ее акустического излучения.
Устройство акустического обнаружения и распознавания летательных аппаратов (ЛА), реализующее предложенный способ, содержит многоканальный акустический приемник 1 излучений (сигналов) ЛА продольных волн звукового диапазона и датчик 2 скорости ветра, например типа «ДСВ 1.13», соединенные через цифровой обнаружитель 3 и через устройство 4 распознавания с индикаторным устройством 5 и радиомодемом 6 передачи пеленгационных данных. Многоканальный приемник 1 содержит не менее двух акустических приемных каналов, включающих последовательно соединенные микрофоны 1.1, усилители 1.2 и аналого-цифровые преобразователи (АЦП) 1.3. Сигнальные выходы АЦП 1.3 соединены с соответствующими сигнальными входами цифрового обнаружителя 3. Цифровой обнаружитель 3 выполнен на перепрограммируемых логических интегральных схемах (ПЛИС) и содержит блок цифровых фильтров 3.1 высоких частот (ФВЧ) с управляемой нижней границей fгр их полосы пропускания. Сигнальные входы ФВЧ 3.1 соединены с выходами соответствующих АЦП 1.3 приемника 1. Управляющие входы всех ФВЧ 3.1 соединены через блок 3.2 расчета нижней границы частоты fгр пропускания и через блок 3.3 расчета дисперсии атмосферных шумов с выходом датчика 2 скорости ветра. Сигнальные выходы фильтров 3.1 соединены с входами цифрового устройства корреляционной обработки сигналов (цифрового коррелятора) 3.4. Выход коррелятора 3.4 соединен с первым входом порогового устройства 3.5, второй вход которого через блок 3.6 расчета адаптивного порога обнаружения соединен со вторым выходом блока 3.2 расчета нижней границы частоты fгр полос пропускания фильтров 3.1. Выход порогового устройства 3.5 по сигналам взаимной корреляционной функции (ВКФ) коррелятора 3.4, превышающим пороговое значение, соединен с входом устройства 4 распознавания типа ЛА. Устройство, 4 как и в [2], содержит последовательно соединенные Фурье преобразователь сигналов ВКФ в спектральный сигнал и блок сравнения спектра сигнала ВКФ с библиотекой спектров типов ЛА соответствующего блока памяти (на фигурах не показано). Выход устройства 4 распознавания соединен с индикаторным устройством 5 и радиомодемом 6 передачи пеленгационных данных на станцию вторичной обработки результатов пеленга.
Устройство акустического обнаружения и распознавания летательных аппаратов (ЛА) по предложенному способу работает следующим образом.
На входы микрофонов 1.1 приемника 1 поступают акустические сигналы вида:
y(t)=Ax(t)+ξ(t),
где x(t) - акустический сигнал от ЛА;
ξ(t) - аддитивный акустический фон;
А - параметр, определяющий наличие или отсутствие ЛА в зоне обзора (А=1 - ЛА есть, А=0 - ЛА нет).
Принятые аналоговые сигналы y усиливаются усилителями 1.2 и далее в АЦП 1.3 преобразуются в цифровую форму:
 ,
,
где xi - значение сигнала от ЛА в i-м отсчете входного сигнала;
ξi - значение аддитивного фона в i-м отсчете входного сигнала;
ηi - значение собственного шума приемного устройства в i-м отсчете входного сигнала;
А - параметр, определяющий наличие или отсутствие ЛА в зоне обзора (А=1 - ЛА есть, А=0 - ЛА нет);
n - размер обрабатываемой реализации принятого сигнала.
После оцифровки усиленные сигналы передаются на соответствующие фильтры 3.1 высоких частот (ФВЧ) цифрового обнаружителя 3. Одновременно на обнаружитель 3 с датчика 2 скорости ветра в цифровой форме выдаются текущие данные о скорости «V» ветра, характеризующие преимущественную мощность фона (акустических шумов атмосферы). При этом по известной экспериментальной зависимости (фиг. 4) в блоке 3.3 производится расчет дисперсии  атмосферных шумов, на фоне которых необходимо обнаружить сигнал от ЛА. Поскольку спектр полезный сигнал от ЛА значительно шире спектра акустического шума, а основная энергия фона сосредоточена в диапазоне до 300 Гц и зависит от скорости ветра «V», то появляется возможность блокировать мощные спектральные составляющие атмосферных шумов в обнаружителе 3 без существенных спектральных потерь полезного сигнала ЛА путем установки нижней частотной границы «fгр» ФВЧ 3.1. Численное значение величины fгр определяется в блоке 3.2 из условия обеспечения требуемого отношения сигнал/шум на входе цифрового коррелятора 3.4. Текущее значение fгр с блока 3.2 передается на все ФВЧ 3.1 одновременно для корректировки их полосы (АЧХкор) пропускания полезного сигнала на фоне помех в каждом приемном канале с увеличенным соотношением сигнал/шум. Далее отфильтрованные цифровые отсчеты аддитивных смесей сигнала и помехи со всех ФНЧ 3.1 поступают на входы коррелятора 3.4. В корреляторе 3.4 в процессе сканирования относительной взаимной задержкой τ сигналов производится расчет взаимной корреляционной функции (ВКФ) с максимумом.
атмосферных шумов, на фоне которых необходимо обнаружить сигнал от ЛА. Поскольку спектр полезный сигнал от ЛА значительно шире спектра акустического шума, а основная энергия фона сосредоточена в диапазоне до 300 Гц и зависит от скорости ветра «V», то появляется возможность блокировать мощные спектральные составляющие атмосферных шумов в обнаружителе 3 без существенных спектральных потерь полезного сигнала ЛА путем установки нижней частотной границы «fгр» ФВЧ 3.1. Численное значение величины fгр определяется в блоке 3.2 из условия обеспечения требуемого отношения сигнал/шум на входе цифрового коррелятора 3.4. Текущее значение fгр с блока 3.2 передается на все ФВЧ 3.1 одновременно для корректировки их полосы (АЧХкор) пропускания полезного сигнала на фоне помех в каждом приемном канале с увеличенным соотношением сигнал/шум. Далее отфильтрованные цифровые отсчеты аддитивных смесей сигнала и помехи со всех ФНЧ 3.1 поступают на входы коррелятора 3.4. В корреляторе 3.4 в процессе сканирования относительной взаимной задержкой τ сигналов производится расчет взаимной корреляционной функции (ВКФ) с максимумом.  Максимальное значение ВКФ Z=Zmax подается далее на первый вход порогового устройства 3.5, на второй вход которого с блока 3.6 подается адаптивное значение порога величиной Zпор. Текущее значение Zпор зависит от уровня акустических шумов после фильтрации (дисперсии D* и заданной вероятности α ложной тревоги по обнаружению ЛА и рассчитывается в блоке 3.6. При этом численное значение дисперсии
Максимальное значение ВКФ Z=Zmax подается далее на первый вход порогового устройства 3.5, на второй вход которого с блока 3.6 подается адаптивное значение порога величиной Zпор. Текущее значение Zпор зависит от уровня акустических шумов после фильтрации (дисперсии D* и заданной вероятности α ложной тревоги по обнаружению ЛА и рассчитывается в блоке 3.6. При этом численное значение дисперсии  , где
, где  - среднеквадратическое отклонение амплитуды шума после фильтрации, находится в блоке 3.6.1 на основе измерений скорости ветра при корректировке полосы пропускания ФНЧ 3.1. При этом численное значение адаптивного порога обнаружения ЛА находят в блоке 3.6.2 из условия обеспечения заданного уровня ложной тревоги α. При превышении значения Zmax полезного сигнала порогового Zпор значения (Zmax≥Zпор в пороговом устройстве 3.5 принимается решение об обнаружении ЛА. Далее распознавание обнаруженного ЛА осуществляется в блоке 4 путем сравнения спектра акустического излучения ЛА с библиотекой спектров типовых летательных аппаратов (фиг. 5). При этом дополнительной информацией для распознавания может быть скорость цели и уровень ее акустического излучения. Результаты распознавания и пеленгационные характеристики обнаруженных ЛА отображаются на индикаторном устройстве 5 и через аппаратуру 6 передачи данных передаются по радиолинии связи на станцию вторичной обработки результатов пеленга для определения пространственно-временных параметров ЛА методом триангуляции.
- среднеквадратическое отклонение амплитуды шума после фильтрации, находится в блоке 3.6.1 на основе измерений скорости ветра при корректировке полосы пропускания ФНЧ 3.1. При этом численное значение адаптивного порога обнаружения ЛА находят в блоке 3.6.2 из условия обеспечения заданного уровня ложной тревоги α. При превышении значения Zmax полезного сигнала порогового Zпор значения (Zmax≥Zпор в пороговом устройстве 3.5 принимается решение об обнаружении ЛА. Далее распознавание обнаруженного ЛА осуществляется в блоке 4 путем сравнения спектра акустического излучения ЛА с библиотекой спектров типовых летательных аппаратов (фиг. 5). При этом дополнительной информацией для распознавания может быть скорость цели и уровень ее акустического излучения. Результаты распознавания и пеленгационные характеристики обнаруженных ЛА отображаются на индикаторном устройстве 5 и через аппаратуру 6 передачи данных передаются по радиолинии связи на станцию вторичной обработки результатов пеленга для определения пространственно-временных параметров ЛА методом триангуляции.
Источники информации
1. В.П. Антонов, А.К. Кузьменко, В.Д. Свет, Е.И. Спицын. Экспериментальные исследования методов акустической навигации вертолета по его шумоизлучению. М: «Акустический журнал», т. 46, №6, 2000.
2. В.И. Кондратьев, С.В. Новиков, Д.Н. Рассадов, А.В. Стадник. Экспериментально-теоретическое исследование возможности акустической пеленгации вертолетов. Дубна: ФГУП «НИИПА», «Молекулярные технологии», №4, 2010.
3. В.А. Тарасов, Д.А. Кропачев. Корреляционная пассивная звуковая локация. М: «Технология и конструирование в электронной аппаратуре», №2, 2002.
4. Gaetano Caronna, Ivan Roselli, Pierluigi Testa. «Acoustic System for Aircraft Detection and Tracking based on Passive Microphones Arrays». Department of Technical Physics Faculty of Engineering University of Rome "La Sapienza", Rome, Italy. 148th Meeting of the Acoustical Society of America San Diego, November 2004.
5. James M. Hanson and Frank J. Marcotte. «Aircraft Wake Vortex Detection Using Continuous-Wave Radar». Johns hopkins apl technical digest, volume 18, number 3 (1997).
6. US 7149147 B1.
7. US 6400647 В1.
8. US 7872948 B2.
9. US 6400647 В1.
10. US 7957225 B2.
11. WO 2009085345 A1.
Разностно-дальномерный способ и наземно-космическая система измерения пространственных координат летательных аппаратов по сигналам радиоизлучения их бортового радиоэлектронного оборудования
Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне
Радиолокационный способ обнаружения и определения параметров движения маловысотных малозаметных объектов в декаметровом диапазоне радиоволн
Генератор водорода
Водогрейный котел
Способ определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты
Разностно-дальномерный способ и наземно-космическая система измерения пространственных координат летательных аппаратов по сигналам радиоизлучения их бортового радиоэлектронного оборудования
Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне
Генератор водорода
Способ определения интервалов относительной стационарности сигналов ионосферно-пространственного распространения радиоволн
Водогрейный котел

