Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ РАЗРУШЕНИЯ ГАНТЕЛЬНОГО ЗАМКА СКРЕБКОВОГО КОНВЕЙЕРА
Вид РИД
Изобретение
Область техники
Изобретение относится к системе и способу обнаружения разрушения замка, в частности к системе и способу обнаружения разрушения гантельного замка скребкового конвейера.
Уровень техники
Рештачные ставы скребкового конвейера в полностью механизированном забое соединяются гантельными замками. В процессе добычи угля полностью механизированное горное оборудование непрерывно продвигают вперед, по мере изменения угольного забоя. Гантельные замки несут огромную ударную нагрузку в процессе продвижения и могут легко изнашиваться и разрушаться под действием чрезвычайно высокой растягивающей силы. В процессе продвижения рештачного става сила сопротивления против продвижения непрерывно возрастает и ход продвижения непрерывно увеличивается. Если какой-либо гантельный замок разрушается, то соединение смежных рештачных ставов может быть смещено или сломано, вызывая цепную реакцию, которая может повлиять на нормальное производство в забое или даже привести к разрушению всей системы добычи угля, и вызывая серьезную потенциальную угрозу безопасности.
В настоящее время в большинстве шахт в Китае до сих пор используется известный метод ручного осмотра для обнаружения отказов, ведущих к разрушению гантельных замков. Из-за сложных рабочих условий в шахтном стволе, большого количества гантельных замков и большой нагрузке при осмотре становится трудно своевременно обнаружить и заменить разрушенные гантельные замки. Следовательно, безопасные горные работы не могут быть обеспечены в шахтном стволе. Существующие методы обнаружения разрушения, в том числе методы с использованием электромагнитной индукции, методы обнаружения с использованием оптоволоконных датчиков, методы обнаружения с использованием датчиков деформации и метод обнаружения по тяге обратного тока и т.д., сложны в реализации из-за сложных рабочих условий в шахтных стволах, трудностей при подземном развертывании, и восприимчивости к внешним помехам.
Раскрытие сущности изобретения
Цель изобретения
В настоящем изобретении предложены система и способ обнаружения разрушения гантельного замка скребкового конвейера, которые преодолевают недостатки ручного обнаружения, просты и легки в реализации, и просты в обслуживании.
Для достижения вышеуказанной цели, настоящее изобретение задействует следующую техническую схему: система обнаружения разрушения гантельного замка в скребковом конвейере содержит скребковый конвейер, беспроводные устройства для измерения расстояния, беспроводные связные устройства, опорные контроллеры и центр управления и контроля; рештачные ставы скребкового конвейера находятся во взаимо-однозначном соответствии с гидравлическими опорами, размещенными в полностью механизированном забое, и расположены в линию вдоль фронта забоя врубовой машины; опорные контроллеры установлены в основании гидравлических опор так, чтобы управлять толкающим/тянущим усилиями для гидравлических опор, и во взаимо-однозначном соответствии с гидравлическими опорами; беспроводные устройства для измерения расстояния установлены по сторонам желоба для транспортировки угля рештачных ставов скребкового конвейера, и осуществляют связь с опорными контроллерами посредством беспроводных связных устройств; и опорные контроллеры электрически соединены с центром управления и контроля через CAN-шину (шину сети управляющих устройств) посредством Ethernet шлюза; беспроводные связные устройства составлены из беспроводных цифровых передающих модулей ZigBee; центр управления и контроля содержит систему обработки сигнала, которая использует чипы с архитектурами ARM (усовершенствованная RISC-машина), DSP (цифровой сигнальный процессор), или FPGA (программируемая пользователем вентильная матрица) в качестве микропроцессоров и цифровые устройства отображения, в которых в качестве ядра служит MCGS программное обеспечение управления производственным оборудованием.
Беспроводное устройство для измерения расстояния содержит направляющее устройство, поддерживающий механизм, неподвижное основание, лазерный дальномер, отражающий экран и установочные болты, при этом направляющее устройство приварено к стороне желоба для транспортировки угля рештачных ставов скребкового конвейера, и работает на верхней поверхности стороны рештачного става для формирования направляющего щелевого отверстия; поддерживающий механизм прикреплен к направляющему устройству с использованием установочных болтов и может перемещаться параллельно вдоль направляющего щелевого отверстия; лазерный дальномер размещен на неподвижном основании и прикреплен к поддерживающему механизму с использованием установочных болтов; отражающий экран непосредственно приварен к поддерживающему механизму в соответствии с направлением распространения лазера.
Направление распространения лазерного луча лазерного дальномера находится на той же горизонтальной линии, что и центр отражающего экрана, и лазерные дальномеры установлены в одних и тех же местах для любых двух смежных рештачных ставов.
Способ обнаружения разрушения гантельного замка скребкового конвейера, включающий в себя следующие этапы, согласно которым:
а) размещают рештачные ставы скребкового конвейера, гидравлические опоры и опорные контроллеры во взаимо-однозначном соответствии и единообразно нумеруют их, по принципу обеспечения прямолинейности и равномерности оборудования в полностью механизированном забое;
б) устанавливают пороговое значение для коэффициента смещения: перед тем как скребковый конвейер продвигают вперед, расстояние между лазерным дальномером, прикрепленным к поддерживающему механизму, и отражающим экраном равняется L (C<L<D); в процессе продвижения вперед скребкового конвейера, из-за ограничения установочного расстояния А между охватываемым разъемом и охватывающим разъемом смежных рештачных ставов и расстояния В стержня гантельного замка, обязательно предусмотрены два предельных положения относительного смещения в процессе относительного смещения двух смежных рештачных ставов до того, как разрушается какой либо гантельный замок; в этих предельных положениях сила сопротивления продвижению максимальна, гантельные замки подвергаются максимальной силе растяжения и испытывают наибольшую деформацию, и гантельные замки находятся в критическом состоянии разрушения: наибольшее расстояние между лазерным дальномером и отражающим экраном, когда любые два смежные рештачных става двигаются в одном и том же направлении относительно друг друга, обозначается как D, а минимальное расстояние между лазерным дальномером и отражающим экраном, когда указанные два смежных рештачных става двигаются в противоположных направлениях относительно друг друга, обозначается как C; для исключения ошибки определения, значения 0,9C/L и 1,1D/L устанавливают в качестве двух пороговых значений М0% и N0%;
в) измеряют расстояние беспроводным образом: в процессе продвижения вперед скребкового конвейера лазерный дальномер излучает лазерный сигнал, лазерному сигналу требуется интервал времени для того, чтобы достичь отражающего экрана и затем он отражается обратно к лазерному дальномеру и расстояние между лазерным дальномером и отражающим экраном определяют в соответствии с интервалом времени; устройство беспроводной связи преобразует измеренное расстояние в форму электрическую сигнала и передает сигнал на опорный контроллер беспроводным образом, а опорный контроллер передает принятый сигнал с данными в центр управления и контроля; таким образом выполняют одно измерение относительного смещения между любыми двумя смежными рештачными ставами;
г) управляют перемещениями с использованием опорных контроллеров: центр управления и контроля обрабатывает данные E относительного смещения для любых двух смежных рештачных ставов и присваивает значения данным E относительного смещения в определенном порядке, получает коэффициент относительного смещения N% (N%=E/L) через вычисления в реальном времени и сравнивает N% с предварительно установленными пороговыми значениями: если значения данных удовлетворяют условию M0%<N%<N0% в любой момент времени в течении каждых 5 с, это означает, что гантельные замки работают в нормальном режиме; если выполняется условие N%<M0% или N%>N0% в любой момент времени в течении каждых 5 с, можно сделать вывод о том, что гантельный замок разрушен; в этом случае центр управления и контроля анализирует данные и устанавливает положение разрушенного гантельного замка, передает информацию обратной связи на соответствующий опорный контроллер для управления остановкой соответствующего рештачного става и выключает скребковый конвейер для проверки;
д) повторяют этапы в) и г) для определения разрушения любого из гантельных замков скребкового конвейера в режиме реального времени.
Положительные эффекты
В соответствии с настоящим изобретением, относительное смещение между любыми двумя смежными рештачными ставами скребкового конвейера используется в качестве опорного значения в процессе продвижения скребкового конвейера, разрушение гантельного замка определяется точно путем сравнения относительного смещения с предварительно заданными пороговыми значениями, положение разрушенного гантельного замка быстро устанавливается посредством центра управления и контроля, а информация обратной связи передается к соответствующему опорному контроллеру для управления движениями соответствующих рештачных ставов. Таким образом, избегается сложная ручная работа и слепота ручного обнаружения, и цикл обнаружения значительно сокращается.
Краткое описание чертежей
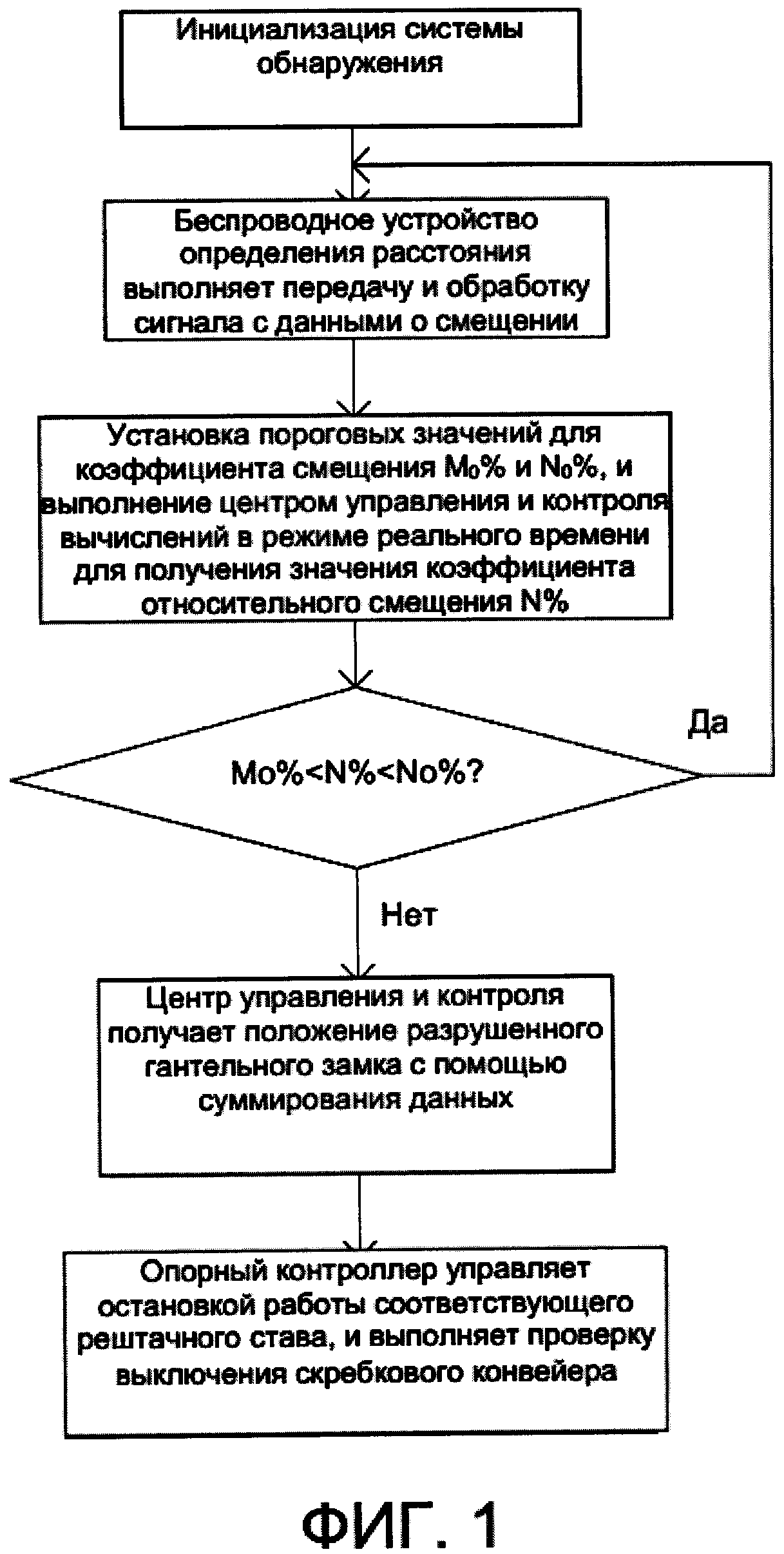
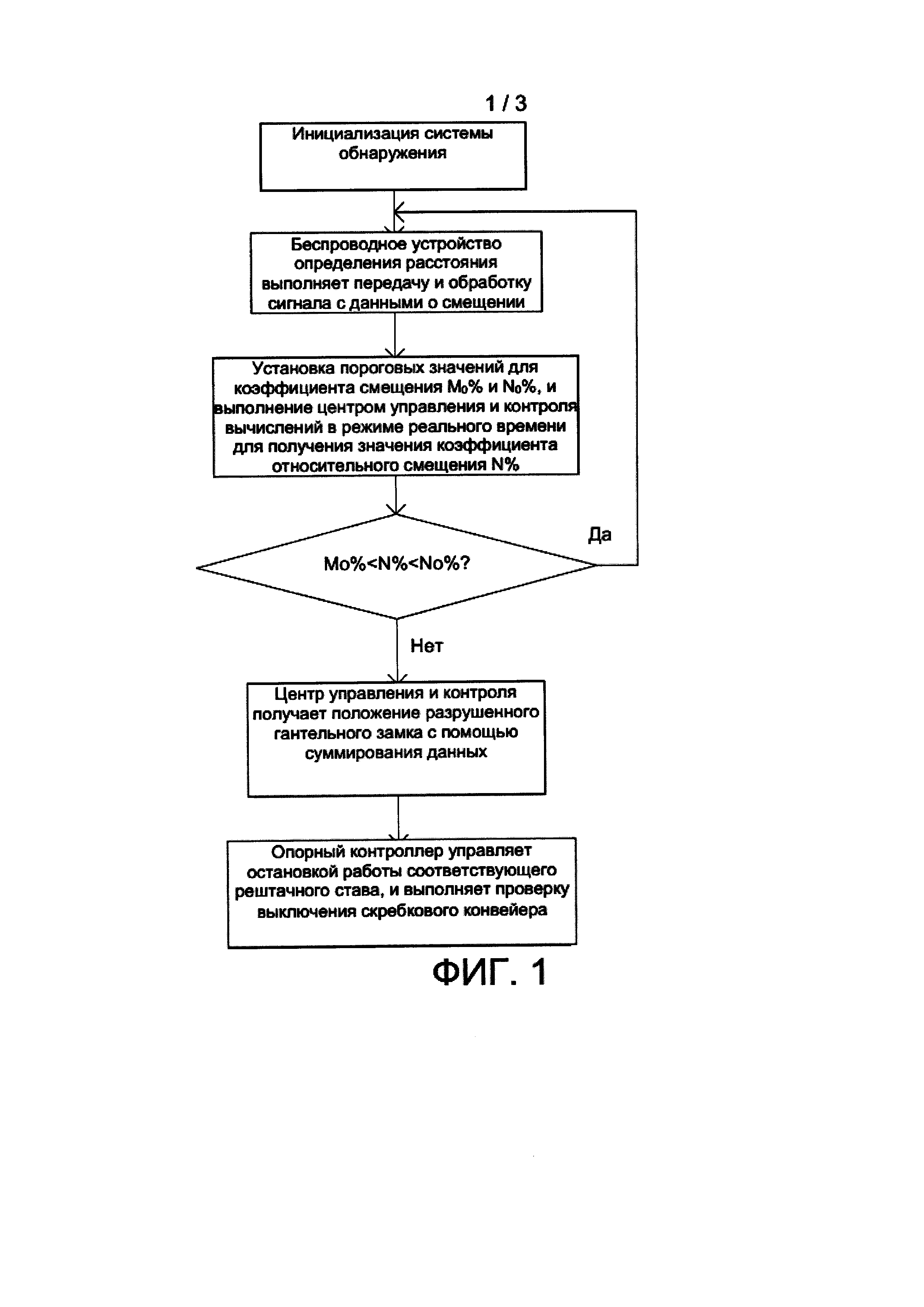
На Фиг. 1 показана блок-схема последовательности операций способа обнаружения разрушения гантельного замка согласно настоящему изобретению;
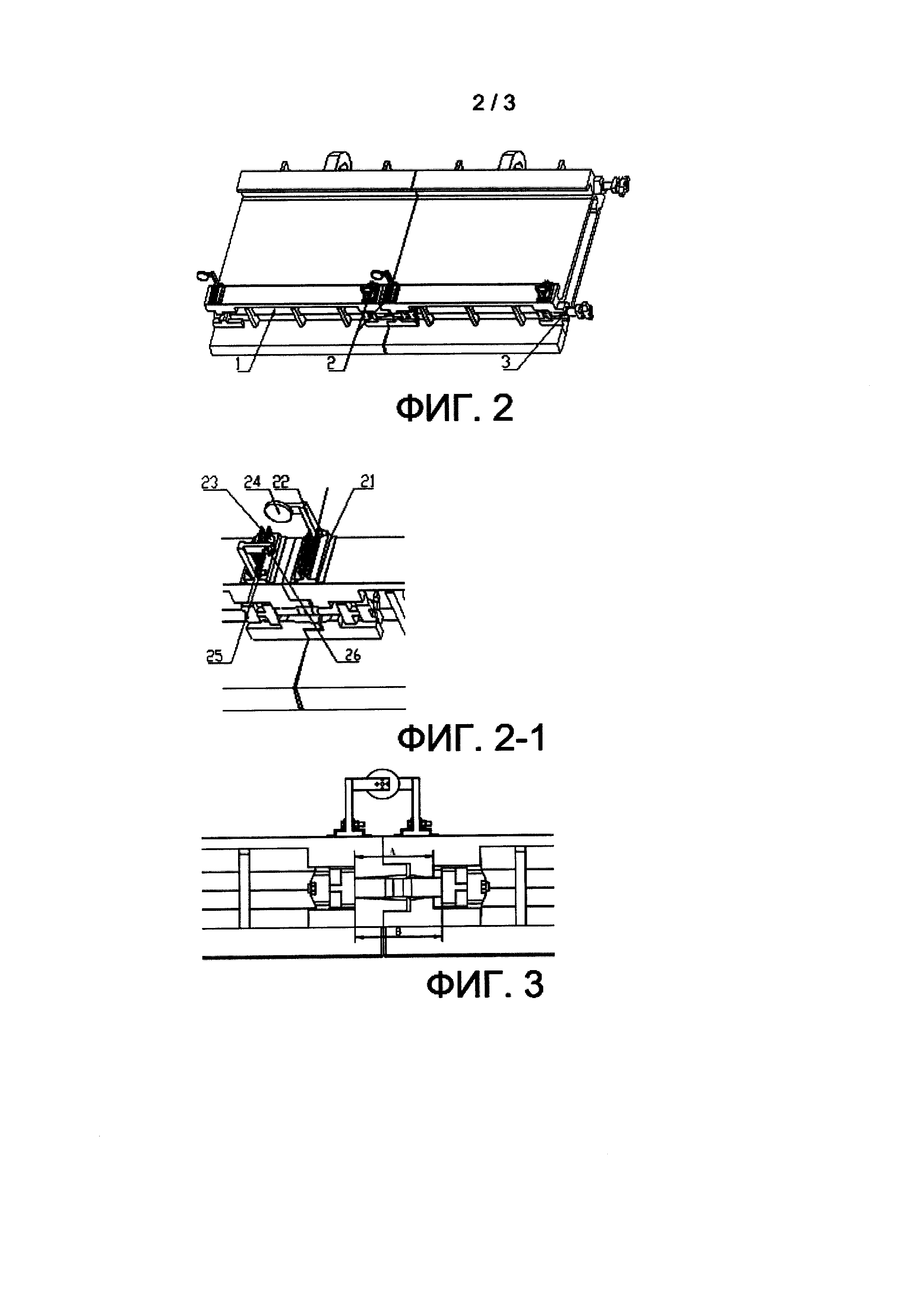
На Фиг. 2 показана схема установки беспроводного устройства для измерения расстояния согласно настоящему изобретению;
На Фиг. 2-1 показана схема беспроводного устройства для измерения расстояния;
На. Фиг. 3 показана схема подгонки размеров основания гантельного замка согласно настоящему изобретению;
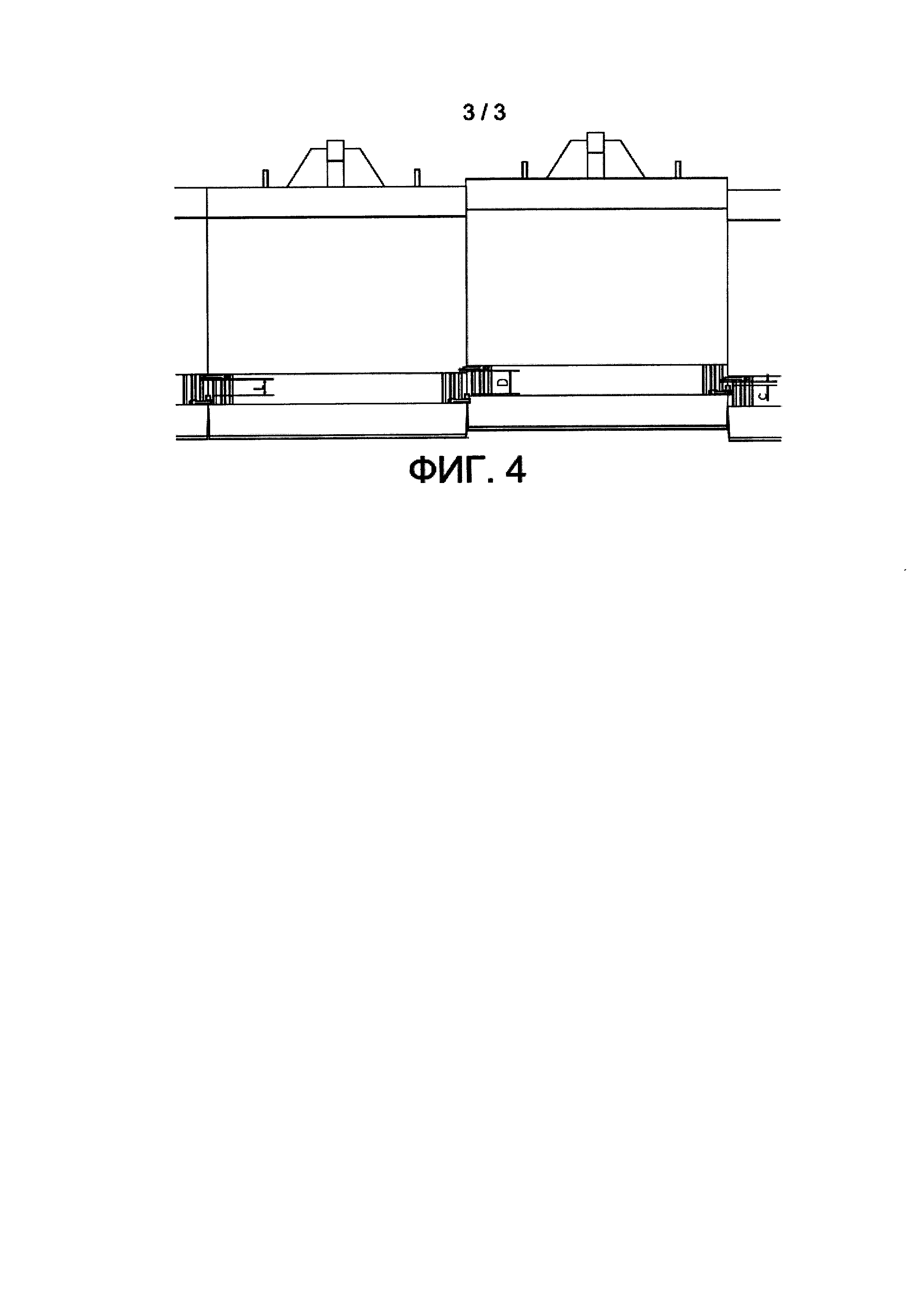
На Фиг. 4 показана схема смежных рештачных ставов в критическом состоянии во время процесса обнаружения разрушения в соответствии с вариантом реализации настоящего изобретения.
На чертежах:
1 - рештачный став скребкового конвейера;
2 - беспроводное устройство для измерения расстояния;
21 - направляющая;
22 - поддерживающий механизм;
23 - неподвижное основание;
24 - отражающий экран;
25 - установочный болт;
26 - отверстие для соединения провода;
3 - гантельный замок.
Осуществление изобретения
Далее настоящее изобретение будет подробно объяснено со ссылками на прилагаемые чертежи.
Как показано на Фиг. 2, система обнаружения разрушения гантельного замка в скребковом конвейере согласно настоящему изобретению содержит рештачные ставы скребкового конвейера, беспроводные устройства для измерения расстояния, беспроводные связные устройства, опорные контроллеры и центр управления и контроля; рештачные ставы 1 скребкового конвейера находятся во взаимо однозначном соответствии с гидравлическими опорами, размещенными в полностью механизированном забое, и расположены в линию вдоль фронта забоя врубовой машины; опорные контроллеры установлены в основании гидравлических опор так, чтобы управлять толкающим/тянущим усилием гидравлических опор, и во взаимо-однозначном соответствии с гидравлическими опорами; беспроводные устройства 2 для измерения расстояния установлены по сторонам желоба для транспортировки угля рештачных ставов скребкового конвейера, и осуществляют связь с опорными контроллерами посредством беспроводных связных устройств; и опорные контроллеры электрически соединены с центром управления и контроля через CAN-шину посредством Ethernet шлюза; беспроводные связные устройства составлены из беспроводных цифровых передающих модулей ZigBee; центр управления и контроля содержит систему обработки сигнала, которая использует ARM, DSP или FPGA чипы в качестве микропроцессоров и цифровые устройства отображения, в которых в качестве ядра служит MCGS программное обеспечение управления производственным оборудованием.
Беспроводное устройство 2 для измерения расстояния содержит направляющее устройство 21, поддерживающий механизм 22, неподвижное основание 23, лазерный дальномер, отражающий экран 24 и установочные болты 25, при этом направляющее устройство 21 приварено к стороне желоба для транспортировки угля рештачных ставов скребкового конвейера, и работает на верхней поверхности стороны рештачного става для формирования направляющего щелевого отверстия; поддерживающий механизм 22 прикреплен к направляющему устройству 21 с использованием установочных болтов 25 и может перемещаться параллельно вдоль направляющего щелевого отверстия; лазерный дальномер размещен на неподвижном основании 23 и прикреплен к поддерживающему механизму 22 с использованием установочных болтов 25; отражающий экран 24 непосредственно приварен к поддерживающему механизму в соответствии с направлением распространения лазера; поддерживающий механизм 22 выполнен с отверстиями 26 для соединеиня проводов для подсоединения электропитания устройства беспроводной связи; направление распространения лазерного луча лазерного дальномера находится на той же горизонтальной линии, что и центр отражающего экрана 24 и лазерные дальномеры установлены в одних и тех же местах для любых двух смежных рештачных ставов.
Как показано на Фиг. 1, 3 и 4, способ обнаружения разрушения гантельного замка скребкового конвейера, включает в себя следующие этапы, согласно которым:
а) размещают рештачные ставы скребкового конвейера, гидравлические опоры и опорные контроллеры во взаимо-однозначном соответствии и единообразно нумеруют их как 1, 2, …, N-1, N, по принципу обеспечения прямолинейности и равномерности оборудования в полностью механизированном забое;
б) устанавливают пороговое значение для коэффициента смещения: перед тем, как скребковый конвейер продвигают вперед, расстояние между лазерным дальномером, прикрепленным к поддерживающему механизму 22 и отражающим экраном 24 равняется L (C<L<D); в процессе продвижения вперед скребкового конвейера, из-за ограничения установочного расстояния А между охватываемым разъемом и охватывающим разъемом смежных рештачных ставов и расстояния В стержня гантельного замка, обязательно предусмотрены два предельных положения относительного смещения в процессе относительного смещения двух смежных рештачных ставов до того, как разрушается какой либо гантельный замок 3; в этих предельных положениях сила сопротивления продвижению максимальна, гантельные замки подвергаются максимальной силе растяжения и испытывают наибольшую деформацию, и гантельные замки находятся в критическом состоянии разрушения: наибольшее расстояние между лазерным дальномером и отражающим экраном, когда любые два смежных рештачных ставаы двигаются в одном и том же направлении относительно друг друга, обозначается как D, а минимальное расстояние между лазерным дальномером и отражающим экраном, когда указанные два смежных рештачных става двигаются в противоположных направлениях относительно друг друга, обозначается как С; для исключения ошибки определения, значения 0,9C/L и 1,1D/L устанавливают в качестве двух пороговых значений М0% и N0%;
в) измеряют расстояние беспроводным образом: в процессе продвижения вперед скребкового конвейера лазерный дальномер излучает лазерный сигнал, лазерному сигналу требуется интервал времени для того, чтобы достичь отражающего экрана 24 и затем он отражается обратно к лазерному дальномеру и расстояние между лазерным дальномером и отражающим экраном определяют в соответствии с интервалом времени; устройство беспроводной связи преобразует измеренное расстояние в форму электрическую сигнала и передает сигнал на опорный контроллер беспроводным образом и опорный контроллер передает принятый сигнал с данными в центр управления и контроля; таким образом выполняют одно измерение относительного смещения между любыми двумя смежными рештачными ставами;
г) управляют перемещениями с использованием опорных контроллеров: центр управления и контроля обрабатывает данные Е относительного смещения для любых двух смежных рештачных ставов и присваивает значения данным Е относительного смещения в определенном порядке, получает коэффициент относительного смещения N% (N%=E/L) через вычисления в реальном времени и сравнивает N% с предварительно установленными пороговыми значениями: если значения данных удовлетворяют условию M0%<N%<N0% в любой момент времени в течении каждых 5 с, это означает, что гантельные замки работают в нормальном режиме; если выполняется условие N%<M0% или N%>N0% в любой момент времени в течении каждых 5 с, можно сделать вывод о том, что гантельный замок разрушен; в этом случае центр управления и контроля анализирует данные и устанавливает положение разрушенного гантельного замка, передает информацию обратной связи на соответствующий опорный контроллер для управления остановкой соответствующего рештачного става и выключает скребковый конвейер для проверки;
д) повторяют этапы в) и г) для определения разрушения любого из гантельных замков скребкового конвейера в режиме реального времени.
Выше приведены лишь предпочтительные варианты реализации настоящего изобретения. Специалистам в данной области техники должно быть понятно, что различные изменения и модификации могут быть сделаны без отступления от сущности и объема защиты настоящего изобретения. Все такие изменения и модификации должны рассматриваться как находящиеся в защищаемом объеме настоящего изобретения.
Способ планирования предупреждения и устранения аварий, связанных со скоплением воды, для шахты, содержащей угольный пласт в виде основного водоносного горизонта
Способ водоудержания для ускорения самовосстановления рудничных трещин посредством химического размягчения карбонатита
Способ восстановления подземного изображения на основе технологии обратной трассировки лучей
Система мониторинга, поддерживающая степень сжатия наполняемого образования в выработанном пространстве угольной шахты, и способ мониторинга
Система глушения вибраций для интегрированного устройства позиционирования с инерциальной навигацией, содержащегося в проходческом комбайне, и способ ее применения

