Результат интеллектуальной деятельности: Ступня ноги шагающего космического микромеханизма
Вид РИД
Изобретение
Изобретение относится к робототехнике, а именно к шагающим мобильным роботам, и предназначено для осуществления работ в экстремальных ситуациях, преимущественно в условиях открытого космоса и выполнения задач напланетных миссий.
Известен робот-альпинист, конструкция которого предусматривает использование адгезивных элементов для закрепления на поверхности перемещения (US 2012181096 [1]). В качестве адгезивных элементов в преимущественном варианте реализации предлагается использовать вакуумные присоски, закрепленные на снабженной соответствующим приводом движущейся ленте, охватывающей опору.
Недостатком известной конструкции является ее сложность и значительные массогабаритные характеристики, что ограничивает их применение для выполнения задач напланетных миссий.
Известна конструкция ноги для многоногого шагающего робота, содержащая гибкую ступню с выполненными в ней отверстиями для подачи жидкого адгезива на нижнюю, контактную поверхность (CN 201784730 [2]). Над ступней размещается резервуар с жидким адгезивом со средством создания в нем избыточного давления, обеспечивающим подачу адгезива на контактную поверхность ступни.
Недостатком известной конструкции является ее сложность и значительные массогабаритные характеристики, что ограничивает их применение для выполнения задач напланетных миссий.
Наиболее близким к заявляемому изобретению по своей технической сущности является шагающий робот, предназначенный для выполнения работ в открытом космосе, в частности для инспекции поверхности аппаратов (US 2007173973 [3]). Ступня робота выполнена в виде пластины, закрепленной на стержне (голеностопе) по ее центру, а на поверхность контакта с поверхностью перемещения нанесен слой адгезива.
Недостатком известной конструкции ступни является ее невозможность адаптации к неровностям поверхности перемещения при высоте неровностей, превышающей толщину адгезива, что приводит к уменьшению поверхности контакта и снижает надежность фиксации робота к поверхности перемещения. Кроме того, ступня робота выполнена в виде пластины, что также снижает надежность фиксации робота к поверхности перемещения. Известно также, что усилие отрыва зачастую превосходит усилие прижатия, при этом известная конструкция не позволяет уменьшить усилие отрыва из-за изотропной жесткости пластины.
Заявляемая конструкция ступни ноги шагающего космического микромеханизма направлена на повышение надежности фиксации на поверхности перемещения.
Указанный результат достигается тем, что ступня ноги шагающего космического микромеханизма выполнена в виде пластины с нанесенным на площадь ее контакта с поверхностью перемещения адгезивом. При этом ступня соединена пяткой с ногой с помощью шарнира с одной степенью свободы, пластина выполнена гибкой с размещенными на ней с промежутками между собой жесткими элементами, при этом их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку.
Указанный результат достигается также тем, что жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку.
Указанный результат достигается также тем что жесткие элементы выполнены с разной площадью, убывающей от пятки к носку
Указанный результат достигается также тем, что суммарная площадь жестких элементов на единице поверхности пластины монотонно убывает от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
Указанный результат достигается также тем, что жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
Указанный результат достигается также тем, что жесткие элементы выполнены с разной площадью, убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку.
Указанный результат достигается также тем, что между гибкой пластиной и адгезивом размещена пленка из поляризованного пьезоэлектрического материала, подсоединенной к источнику переменного напряжения.
Указанный результат достигается также тем, что источник переменного напряжения выполнен с рабочей частотой выше 2 кГц (http://www.piceramic.de [5]).
Указанный результат достигается также тем, что жесткие элементы выполнены из пластин пьезоэлектрика и подсоединены к источнику переменного напряжения.
Указанный результат достигается также тем, что источник переменного напряжения выполнен с рабочей частотой выше 2 кГц.
Указанный результат достигается также тем, что адгезив размещен на гибкой пластине в виде отдельных площадок на поверхности контакта ступни с поверхностью перемещения, при этом площадки адгезива размещены под жесткими элементами.
Указанный результат достигается также тем, что площадки адгезива совпадают по форме и размеру с жесткими элементами, размещенными на гибкой пластине.
Указанный результат достигается также тем, что используют адгезив с многократным циклом «прилипание-отлипание».
Отличительными признаками заявляемого устройства являются:
- ступня соединена пяткой с ногой с помощью шарнира с одной степенью свободы;
- пластина выполнена гибкой с размещенными на ней с промежутками между собой жесткими элементами;
- суммарная площадь жестких элементов на единице поверхности пластины монотонно убывает от пятки к носку;
- жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку.
- жесткие элементы выполнены с разной площадью, убывающей от пятки к носку;
- суммарная площадь жестких элементов на единице поверхности пластины монотонно убывает от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку;
- жесткие элементы выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку;
- жесткие элементы выполнены с разной площадью, убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку;
- между гибкой пластиной и адгезивом размещена пленка из поляризованного пьезоэлектрического материала, подсоединенной к источнику переменного напряжения;
- источник переменного напряжения выполнен с рабочей частотой выше 2 кГц,
- жесткие элементы выполнены из пластин пьезоэлектрика и подсоединены к источнику переменного напряжения;
- источник переменного напряжения выполнен с рабочей частотой выше 2 кГц;
- адгезив размещен на гибкой пластине в виде отдельных площадок на поверхности контакта ступни с поверхностью перемещения, при этом площадки адгезива размещены под жесткими элементами;
- площадки адгезива совпадают по форме и размеру с жесткими элементами, размещенными на гибкой пластине;
- используют адгезив с многократным циклом «прилипание-отлипание». Выполнение пластины гибкой обеспечивает адаптацию ступни по неровной поверхности перемещения и этим обеспечивает увеличение площади контакта между ступней и поверхностью перемещения.
Размещение жестких элементов на пластине с промежутками между собой не влияет на адаптацию ступни к поверхности перемещения, но предотвращает ее скручивание, т.к. жесткие элементы выполняют роль грузиков и обеспечивают прижим ступни к поверхности перемещения.
Соединение ступни пяткой с ногой с помощью шарнира с одной степенью свободы и размещение жестких элементов на пластине так, что их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку необходимо для того, чтобы преодолеть силу сцепления ступни с поверхностью перемещения, обусловленную наличием адгезива и обеспечить отрыв ступни от поверхности перемещения. Таким образом механика процесса «прилипание-отлипание» заключается в последовательном прикреплении пятки ступни с помощью адгезива, образовании узкой трещины, образуемой между поверхностью и пяткой ступни, увеличении поверхности контакта, с уменьшением величины трещины и в результате прикрепления ступни к поверхности с незначительным усилием по сравнению с со ступней, выполненной из жесткой пластинки. Отлипание ступни от поверхности начинается от пятки ступни к носку с последовательным увеличением трещины за счет ослабления сил сцепления при условии переменной жесткости, монотонно убывающей от пятки к носку.
Для того, чтобы обеспечить выполнение условия монотонного убывания от пятки к носку суммарной площади жестких элементов на единице поверхности пластины можно использовать в частных случаях различные варианты реализации устройства. Можно жесткие элементы выполнять одинаковой площади, а промежутки между ними увеличивать от пятки к носку. А можно выполнять жесткие элементы с разной площадью, убывающей от пятки к носку.
Кроме того, в частных случаях реализации целесообразно изменять жесткость ступни не только от пятки к носку, но и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку. Это обеспечит полный контакт ступни с поверхностью при условии неоднородностей поверхности по двум осям.
При этом также возможны варианты реализации для выполнения этого условия. Можно жесткие элементы выполнять одинаковой площади и изменять промежутки между ними по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку, а можно выполнять жесткие элементы с разной площадью, уменьшающейся по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку.
В частных случаях реализации целесообразно между гибкой пластиной и адгезивом размещать пленку из поляризованного пьезоэлектрического материала, подсоединенную к источнику переменного напряжения. При подаче напряжения ступня будет вибрировать и может обеспечить выполнение двух функций - облегчить отрыв ступни от поверхности перемещения чтобы преодолеть силу сцепления ступни с поверхностью перемещения, обусловленную наличием адгезива (напряжение следует подавать с момент совершения шага) и обеспечить очистку адгезива от загрязнений. В этом случае необходимо подавать переменное напряжение с частотой выше 2 кГц.
В частных случаях целесообразно выполнять жесткие элементы в виде пластин пьезоэлектрика и подсоединять к источнику переменного напряжения. В этом случае жесткие элементы будут выполнять несколько функций - выполнять роль грузиков, обеспечивая прижим ступни к поверхности перемещения и являться источником колебаний, облегчая отрыв ступни от поверхности перемещения, чтобы преодолеть силу сцепления ступни с поверхностью перемещения, обусловленную наличием адгезива (напряжение следует подавать с момент совершения шага) и обеспечивать очистку адгезива от загрязнений. Адгезив в этом случае целесообразно размещать на гибкой пластине в виде отдельных площадок на поверхности контакта ступни с поверхностью перемещения и площадки адгезива размещать под жесткими элементами. Это позволит существенно снизить массу конструкции. Представляется оптимальным для функционирования шагающего робота использовать адгезив с многократным циклом «прилипание-отлипание». В частности, такой «сухой» адгезив описан, например, в (CN 103333495 [4], www.membrana.ru/particle/17615 [6]).
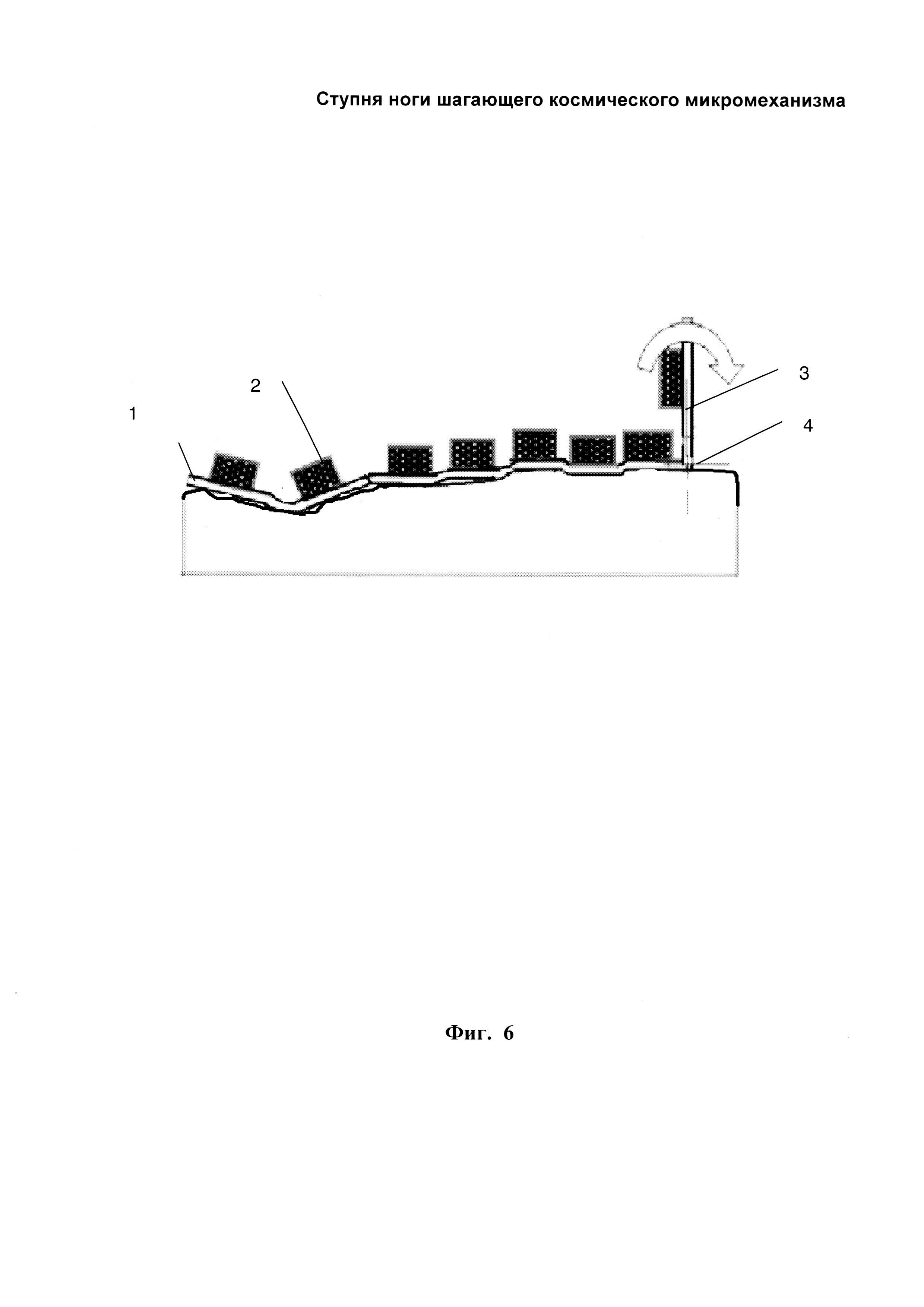
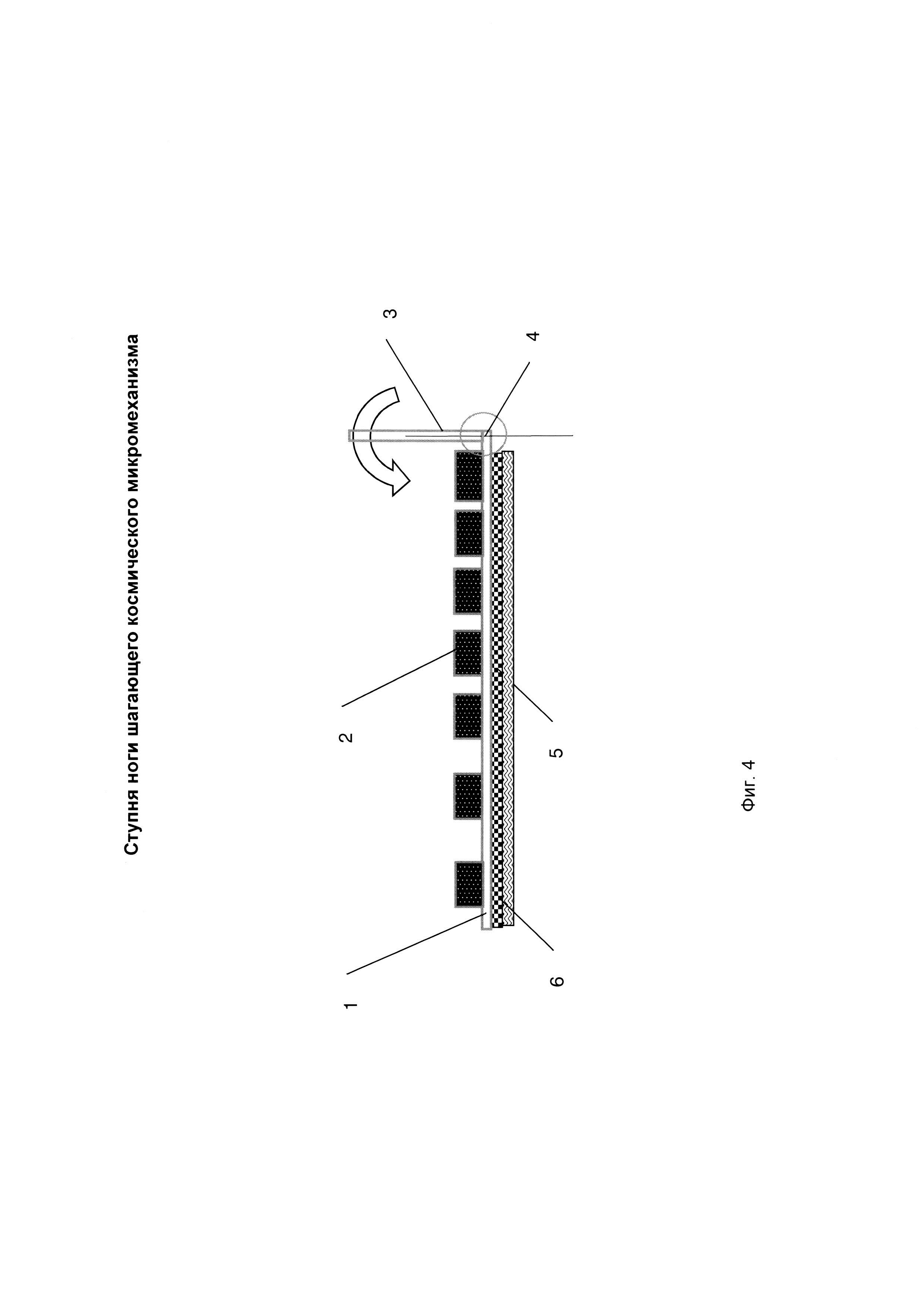
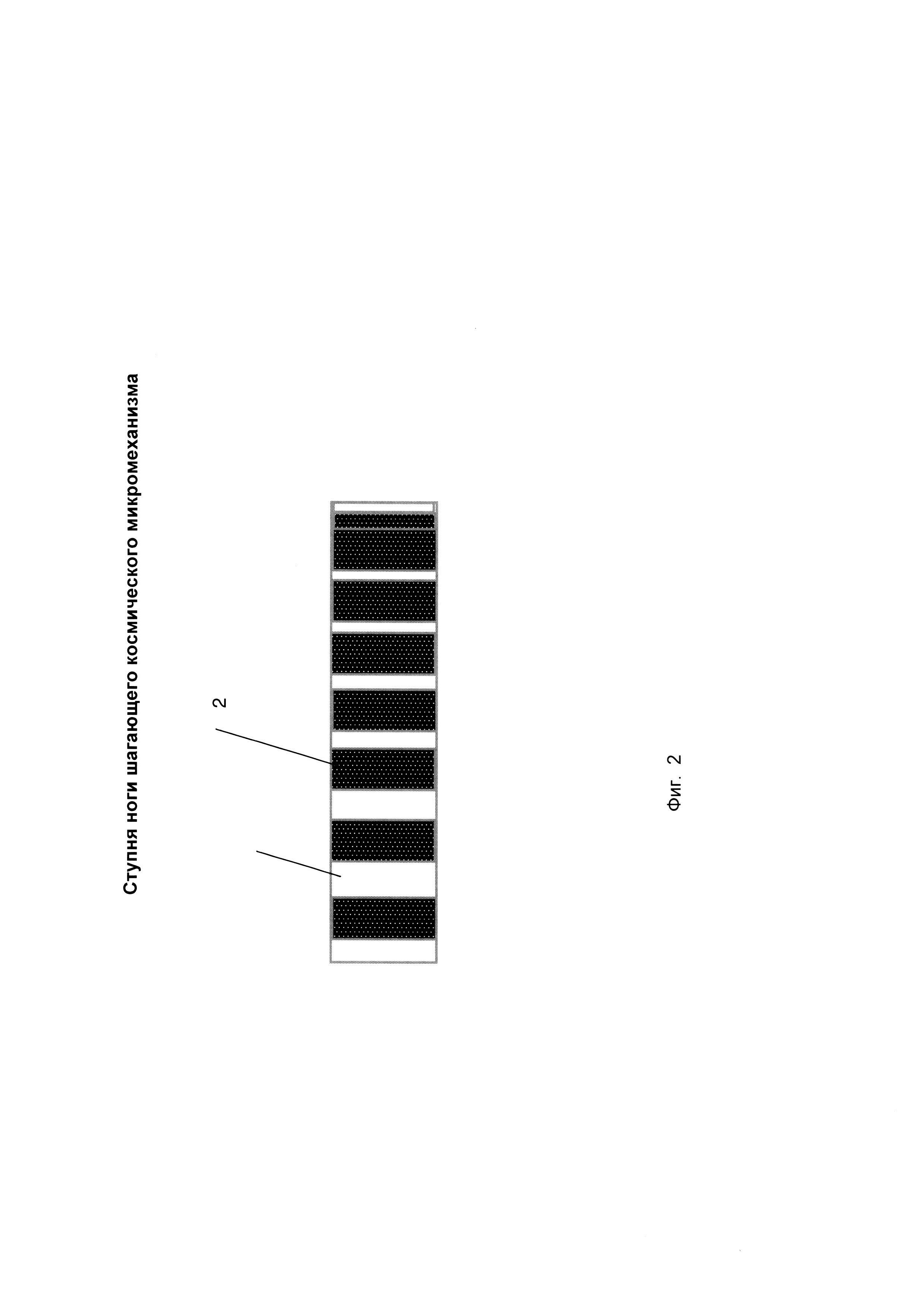
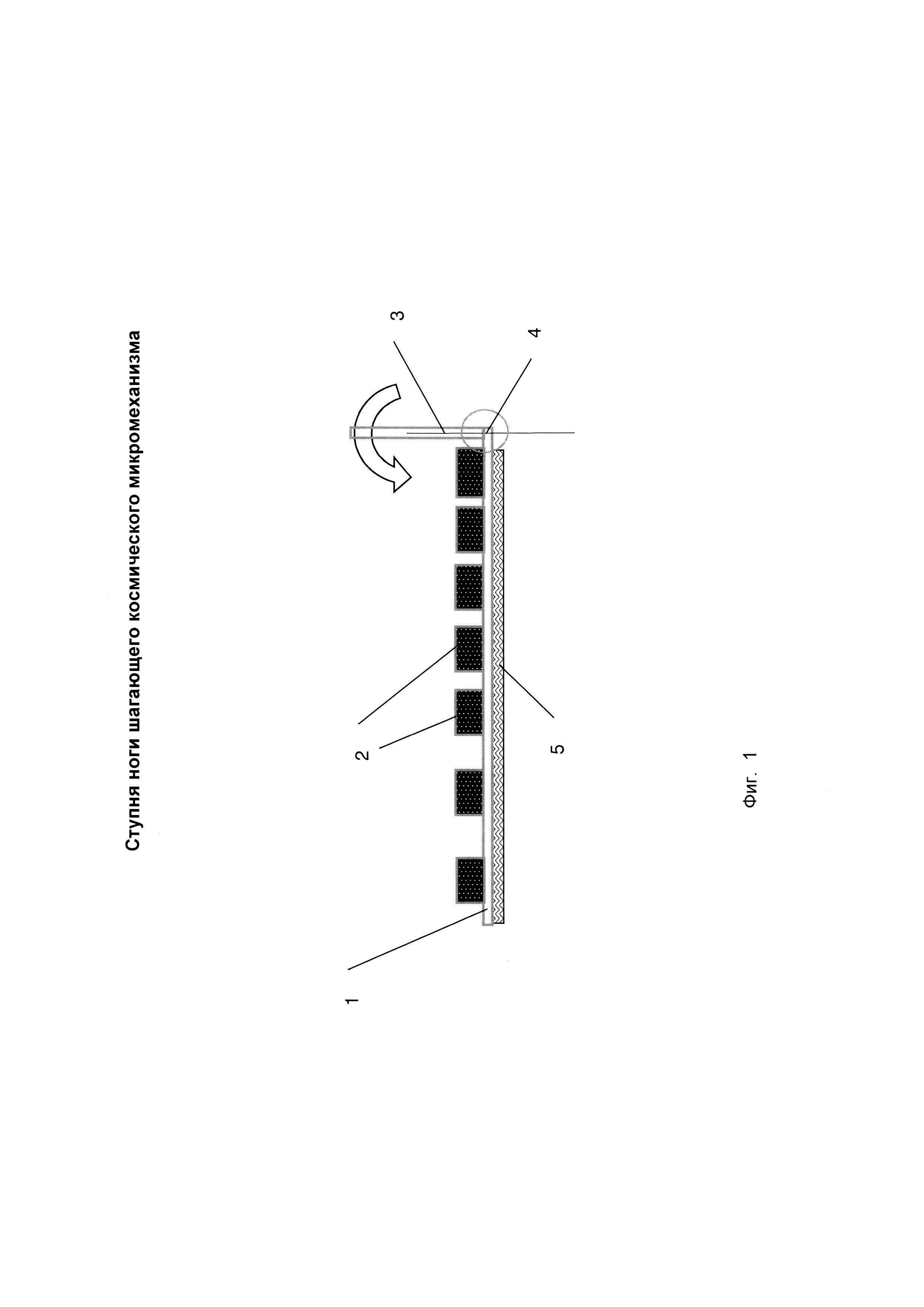
Сущность заявляемого устройства поясняется примерами реализации и чертежами. На фиг.1 показан схематично вид сбоку на ступню, реализованную в наиболее общем виде. На фиг.2 показан схематично вид сверху на ступню. На фиг.3 представлены варианты реализации ступни (вид сверху) когда жесткие элементы выполнены с разной площадью, убывающей по направлению к периферии от оси симметрии, проходящей через пятки к носку. На фиг. 4 представлен вариант реализации ступни с использованием между гибкой пластиной и адгезивом пленки из поляризованного пьезоэлектрического материала, подсоединенную к источнику переменного напряжения. На фиг. 5 представлен вариант реализации ступни с использованием жестких элементов, выполненных из пьезоэлектрического материала, подсоединенных к источнику переменного напряжения. На фиг. 6 схематично показана адаптация ступни к поверхности перемещения.
Пример 1. Ступня в самом общем случае представляет собой гибкую пластину 1 на которой размещены с промежутками между собой жесткие элементы 2 так, что их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку. Ступня соединена пяткой с ногой 3 с помощью шарнира 4 с одной степенью свободы. На поверхность контакта пластины 1 с поверхностью перемещения нанесен слой адгезива 5. В качестве материала пластины может использоваться полиимид, полиэфирамид, полисульфон или подобный полимер, формируемый из раствора с последующей полимеризацией. В качестве материала жестких элементов может выступать монокристаллический кремний, поликристаллический кремний, поликор, металлы или пьезоэлектрические жесткие материалы -кварц, ниобат лития и пр.
Устройство функционирует следующим образом. При прилипании ступни (фиг 1) к поверхности последовательно прикрепляется пятка ступни возле шарнира 4 с помощью адгезива 5 с постепенным увеличением площади контакта между ступней и поверхностью за счет адгезионных сил с уменьшением трещины между ступней и поверхностью и за счет переменной жесткости ступни (фиг. 3), обеспечиваемой суммарной площадью жестких элементов 2 (фиг. 3) на единице поверхности пластины монотонно убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку. При этом жесткие элементы 2 (фиг. 3) выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку, жесткие элементы могут быть выполнены с разной площадью (2, фиг. 3), убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку. Отлипание ступни (фиг.1 - 5) от поверхности начинается от пятки ступни к носку с последовательным увеличением трещины за счет ослабления сил сцепления при условии переменной жесткости ступни, монотонно убывающей от пятки к носку за счет уменьшения площади жестких элементов 2.
Пример 2. Ступня представляет собой гибкую пластину 1 на которой размещены с промежутками между собой жесткие элементы 2 так, что их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку. Ступня соединена пяткой с ногой 3 с помощью шарнира 4 с одной степенью свободы, пластина выполнена гибкой с размещенными на ней с промежутками между собой жесткими элементами, при этом их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку. На поверхность контакта пластины 1 с поверхностью перемещения нанесен слой адгезива 5. Между гибкой пластиной 1 и слоем адгезива размещена пленка 6 из поляризованного пьезоэлектрического материала, подсоединенной к источнику переменного напряжения (на чертеже не показано).
Устройство функционирует следующим образом. При прилипании ступни (фиг 4.) к поверхности последовательно прикрепляется пятки ступни возле шарнира 4 помощью адгезива 5 с постепенным увеличением площади контакта между ступней и поверхностью за счет адгезионных сил и деформации ступни за счет пьезоэлектрической пленки 6, активированной напряжением с последовательным уменьшением трещины между ступней и поверхностью и за счет переменной жесткости ступни (фиг. 3), обеспечиваемой суммарной площадью жестких элементов 2 (фиг. 3) на единице поверхности пластины, монотонно убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку. При этом жесткие элементы 2 (фиг. 3) выполнены одинаковой площади, а промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку, а жесткие элементы выполнены с разной площадью, убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку. После образования контакта пятки с поверхностью активацию напряжением пленки 6 отключают. Отлипание ступни (фиг. 4) от поверхности начинается от пятки ступни к носку при одновременной активации пьезоэлектрической пленки 6 с последовательным увеличением трещины за счет ослабления сил сцепления при условии переменной жесткости ступни, монотонно убывающей от пятки к носку за счет уменьшения площади жестких элементов 2.
Пример 3. Ступня представляет собой гибкую пластину 1 на которой размещены с промежутками между собой жесткие элементы 2 так, что их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку. Ступня соединена пяткой с ногой 3 с помощью шарнира 4 с одной степенью свободы, пластина выполнена гибкой с размещенными на ней с промежутками между собой жесткими элементами, при этом их суммарная площадь на единице поверхности пластины монотонно убывает от пятки к носку. Под жесткими элементами на гибкой пластине размещен адгезив в виде отдельных площадок на поверхности контакта ступни с поверхностью перемещения. Жесткие элементы 2 выполнены из пьезоэлектрического материала и подсоединены к источнику переменного напряжения (на чертеже не показано). В качестве пьезоэлектрического материала может выступать монокристаллический кварц, спеченная пьезокерамика типа ЦТС, ниобат лития и пр.
Устройство функционирует следующим образом. При прилипании ступни (фиг 5.) к поверхности последовательно прикрепляется пятка ступни, расположенная возле шарнира 4 с помощью адгезива 5 с постепенным увеличением площади контакта между ступней и поверхностью за счет адгезионных сил и деформации ступни с последовательным уменьшением трещины между ступней и поверхностью и за счет переменной жесткости ступни (фиг. 2 и 3), обеспечиваемой суммарной площадью жестких элементов 2 (фиг. 5) на единице поверхности пластины монотонно убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку. При этом жесткие элементы 2 (фиг. 5) выполнены из пьезоэлектрика, промежутки между ними возрастают от пятки к носку и по направлению к периферии от оси симметрии, проходящей через ступню от пятки к носку. Жесткие элементы могут быть выполнены с разной площадью (2, фиг. 3), убывающей от пятки к носку и по направлению к периферии от оси симметрии, проходящей через пятки к носку. Перед образованием контакта между ступней и поверхностью пьезоэлектрические жесткие вставки активируются напряжением для удаления пыли, частиц и т.п. Затем активацию напряжением жестких элементов 2 отключают. Отлипание ступни (фиг. 5) от поверхности начинается от пятки ступни к носку с последовательным увеличением трещины за счет ослабления сил сцепления при условии переменной жесткости ступни, монотонно убывающей от пятки к носку.
Литература
1. US 2012181096.
2. CN 201784730.
3. US 2007173973.
4. CN 103333495.
5. http://www.piceramic.de
6. www.membrana.ru/particle/17615
Ступня ноги для шагающего космического микроробота
Устройство для испытания материалов на трение и износ
Шагающий инсектоморфный мобильный микроробот
Устройство управления манипулятором робота
Способ определения коэффициентов трения трибосопряжения "поддон-напольное покрытие"
Генератор импульсов ионизации
Способ измерения температуры модели при вакуумировании в гиперзвуковом потоке
Способ удаления нефтепродуктов с поверхности воды
Способ лазерной калибровки датчиков теплового потока с имитацией экспериментальной нагрузки
Способ одновременной калибровки нескольких датчиков теплового потока
Способ изготовления метаматериала (варианты)
Микромеханическая система
Солнечная батарея для малоразмерных космических аппаратов и способ ее изготовления
Микроструктурная многослойная экранно-вакуумная изоляция космических аппаратов
Микросистемный космический робот-инспектор (варианты)
Способ фотолитографии
Микросистемный захват
Двунаправленный тепловой микромеханический актюатор и способ его изготовления
Кремниево-полиимидное гибкое сочленение для микросистем
Датчик электростатического поля

