Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ
Вид РИД
Изобретение
Изобретение относится к области навигации летательных аппаратов (ЛА) и предназначено для обеспечения безопасности полета группы ЛА, выполняющих совместные действия в сложных навигационных условиях, в том числе, при плохой видимости.
Известные способы определения относительного положения ЛА предполагают определение положения каждого из группы ЛА по крайней мере одним из навигационных способов и передачу данных о положении через каналы информационного обмена между всеми ЛА и, дополнительно, локационным способом путем излучения и приема зондирующих сигналов каждым ЛА с целью определения положения соседнего ЛА [1-5]. Необходимость дополнительного определения положения объясняется недостаточной точностью и надежностью определения взаимного положения навигационным способом.
В упомянутых патентах для повышения точности навигационного способа определения относительного положения используется спутниковая навигационная система (СНС) и передача данных о положении между ЛА и, дополнительно, из-за низкой надежности спутниковых данных, определение относительного положения соседних ЛА с помощью датчика относительного положения, построенного, например, на локационном способе.
В патенте [1] в качестве такого датчика используется радиолокационная станция межсамолетной навигации РЛС-МСН, в [2] выполняется измерение интенсивности высокочастотного сигнала, передаваемого соседним ЛА, в [3] и [4] - миллиметровый радар, в [5] - дальномерная система.
Если бы СНС и передача данных обладали достаточной надежностью, требуемой для управления ЛА, дополнительные датчики относительного положения не потребовались. Существующие СНС типа GPS и ГЛОНАСС имеют вероятность выдачи ошибочных данных 10-4 в час [6], что не удовлетворяет современным требованиям безопасности полета ЛА. По этой причине в существующих способах относительной навигации и управления полетом группы ЛА используют дополнительные системы определения относительного положения.
Наиболее распространенным предложением построения дополнительной системы определения относительного положения в патентах [1-4] является использование радиолокационного способа, позволяющего определить дальность и угловое положение соседних ЛА. Основным недостатком такого способа (и, вообще, первичной радио, тепловой и оптической локации) по отраженному от цели сигналу является отсутствие опознавания цели. Для опознавания цели в авиационной практике управления воздушным движением находит применение способ вторичной радиолокации, при котором на ЛА устанавливаются ответчики радиолокационных сигналов, передающие, кроме ответного дальномерного сигнала, также информационный сигнал [7]. Использование ответчиков также повышает точность и надежность радиолокационного способа. Недостатком радиолокационного способа является сложность реализации. Например, в [3] для обзора пространства вокруг ЛА предлагается применить шесть локаторов.
Более простым в реализации является дальномерный метод [5] с использованием ответчиков, который решает задачу измерения дальности между ЛА и задачу опознавания. При этом предполагается наличие системы синхронизации работы аппаратуры ЛА, работающей в режиме с временным разделением доступа к общему частотному каналу связи [13].
Согласно [5, 13], обмен информацией между ЛА в группе из небольшого числа ЛА (до 12) осуществляется в режиме TDMA (Time-Division Multiple Access - множественный доступ с временным разделением).
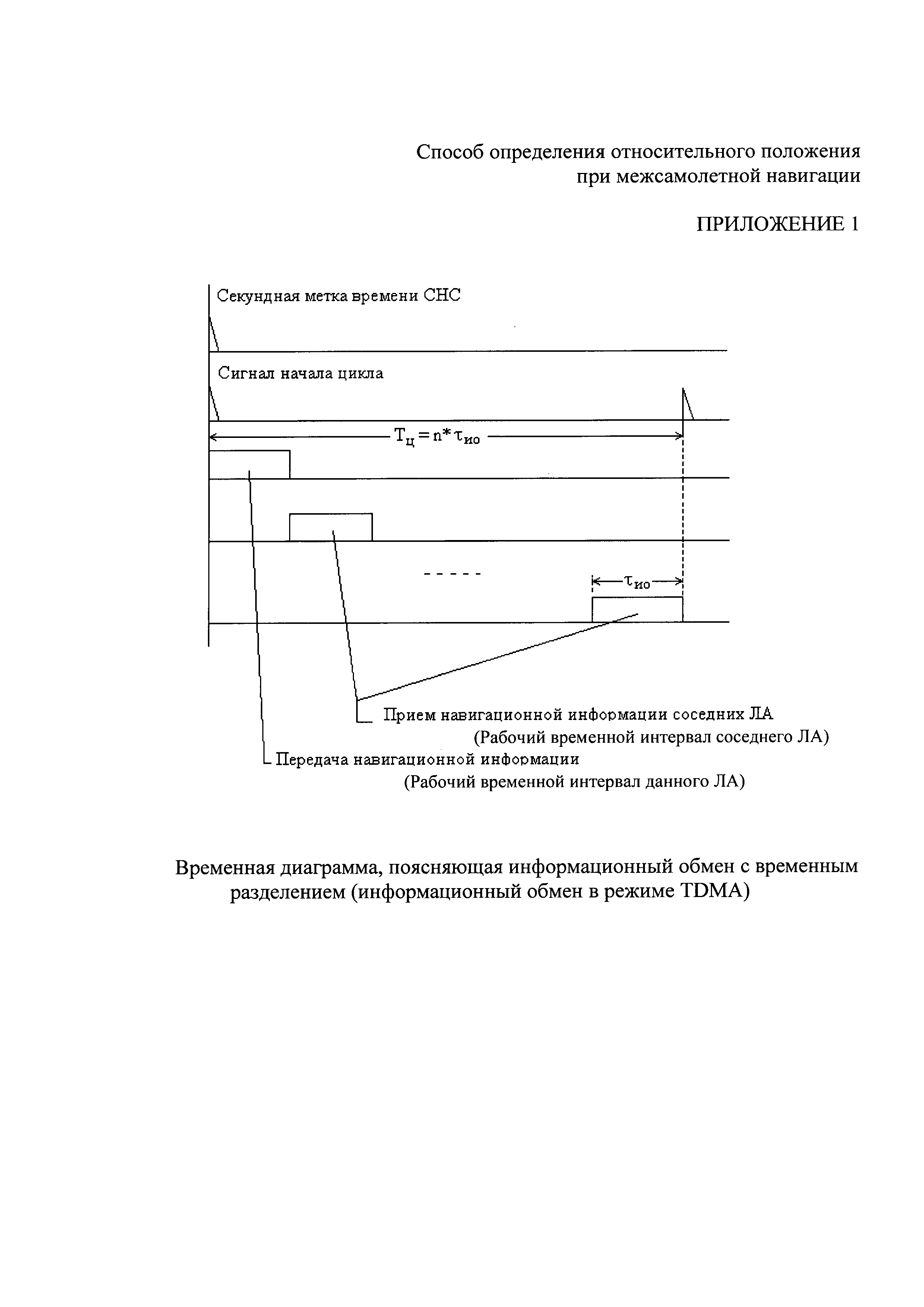
С этой целью в [5] предложена операция формирования сигналов синхронизации, обеспечивающая разделение времени приема и передачи навигационной информации. Для этого формируется интервальная временная сетка с периодом Тц, состоящая из n интервалов информационного обмена. При этом сигнал начала цикла информационного обмена всех ЛА синхронизируется меткой времени СНС (например, секундной меткой, Приложение 1). Период Tц равен
Tц=nτио,
где n - число интервалов информационного обмена в Tц; τио - длительность интервала информационного обмена.
Интервалы информационного обмена закреплены за каждым ЛА (число интервалов информационного обмена соответствует числу ЛА).
Недостатками такого способа информационного обмена в режиме TDMA [5, 13] являются дефицит временного ресурса при увеличении числа ЛА по сравнению с предельным значением, равным числу интервалов информационного обмена n, и неэффективное использование временного ресурса при уменьшении числа ЛА по сравнению с предельным значением.
Для устранения этих недостатков в [11, 12] предложен обмен информацией между ЛА в группе из произвольного числа ЛА, который осуществляется в режиме STDMA (Self-Organized Time-Division Multiple Access - самоорганизующийся множественный доступ с временным разделением). В этом случае интервалы информационного обмена не закреплены за каждым ЛА и для выбора интервала применяется метод уведомлений «интервал занят/свободен», реализуемый в три этапа: запрос на получение рабочего интервала, прием списка доступных интервалов, случайный выбор рабочего интервала (рабочих интервалов) из списка доступных интервалов.
Недостатком такого способа информационного обмена в режиме STDMA [11, 12] является большая временная задержка в распределении интервалов информационного обмена при изменении числа ЛА.
Общим недостатком способов [5, 13] и [11, 12] является то, что синхронизация интервальной временной сетки выполняется по сигналам синхронизации СНС, отказ которой ведет к неработоспособности операции формирования сигналов синхронизации. При этом точность временного разделения обмена информацией при отказе СНС зависит исключительно от качества бортовых эталонов времени.
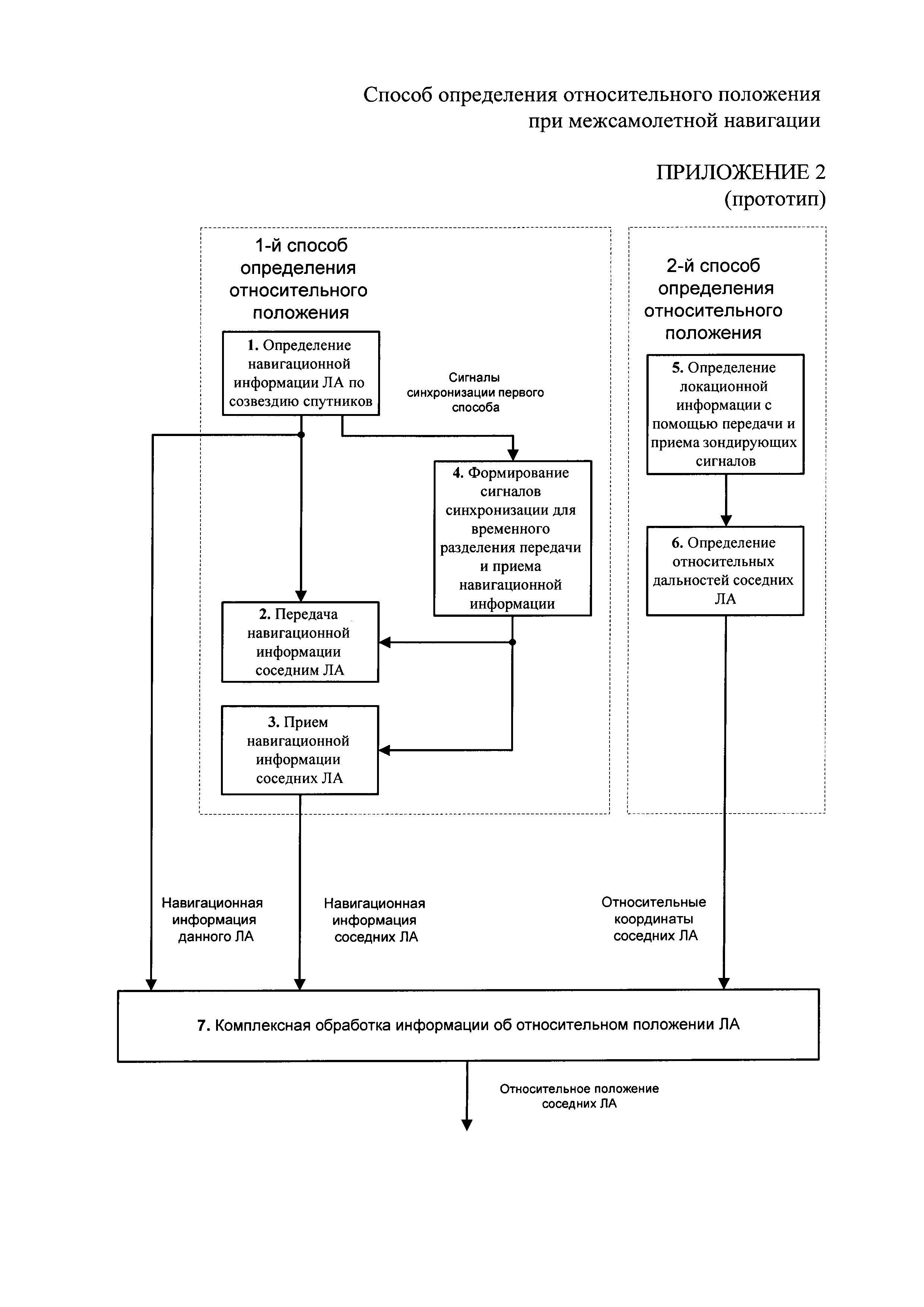
Способ-прототип [3] состоит в том, что предлагается способ определения относительного положения при межсамолетной навигации в общем случае N летательных аппаратов (ЛА), предусматривающий для каждого ЛА определение относительного положения соседних ЛА по отношению к данному ЛА первым и вторым способами, комплексную обработку информации об относительном положении ЛА, полученной первым и вторым способами, при этом первый способ предусматривает определение навигационной информации каждого ЛА по созвездию спутников, передачу упомянутой информации соседним ЛА и прием навигационной информации соседних ЛА через каналы информационного обмена путем формирования сигналов синхронизации для временного разделения передачи и приема навигационной информации, а второй способ предусматривает определение локационной информации с помощью передачи и приема зондирующих сигналов каждым ЛА и определение относительных дальностей соседних ЛА.
Блок-схема последовательности действий по способу-прототипу с расшифровкой обозначений приведена в Приложении 2. Там же показано использование сигналов синхронизации первого способа для формирования сигналов временного разделения передачи и приема навигационной информации в соответствии с Приложением 1.
Общим недостатком прототипа и аналогов изобретения является низкая надежность операции формирования сигналов временного разделения передачи и приема навигационной информации, что значительно снижает безопасность полетов.
Задачей заявляемого способа является повышение безопасности полетов путем повышения надежности операции формирования сигналов временного разделения передачи и приема навигационной информации, а также обеспечение временного разделения при получении локационной информации.
Поставленная задача решается следующим образом.
Предлагается способ определения относительного положения при межсамолетной навигации в общем случае N летательных аппаратов (ЛА), предусматривающий для каждого ЛА определение относительного положения соседних ЛА по отношению к данному ЛА первым и вторым способами, комплексную обработку информации об относительном положении ЛА, полученной первым и вторым способами, при этом первый способ предусматривает определение навигационной информации каждого ЛА по созвездию спутников, передачу упомянутой информации соседним ЛА и прием навигационной информации соседних ЛА через каналы информационного обмена путем формирования сигналов синхронизации для временного разделения передачи и приема навигационной информации, а второй способ предусматривает определение локационной информации с помощью передачи и приема зондирующих сигналов каждым ЛА и определение относительных дальностей соседних ЛА, при этом во втором способе для зондирующих сигналов также используется временное разделение с помощью сигналов синхронизации, а для обеспечения временного разделения упомянутых сигналов информационного обмена первого способа и временного разделения зондирующих сигналов второго способа формируют общие сигналы синхронизации для первого и второго способов на основе комплексной обработки временных параметров сигналов синхронизации первого и второго способов, при этом для формирования упомянутых сигналов синхронизации в первом способе при определении навигационной информации измеряют время прихода сигналов синхронизации данного ЛА, а во втором способе при определении локационной информации передают дополнительно сигналы синхронизации соседним ЛА, последовательно производят выделение сигналов синхронизации соседних ЛА, измерение времени прихода упомянутых сигналов синхронизации, преобразование упомянутого времени к рабочему временному интервалу, компенсацию временных задержек на основе учета относительных дальностей соседних ЛА, далее по измеренным в первом и втором способах временам прихода сигналов синхронизации выполняют комплексную обработку временных параметров сигналов синхронизации первого и второго способов, причем для обеспечения взаимного обмена информацией между ЛА формируют и настраивают на основе исходной шкалы времени корректируемую шкалу времени, определяют начало цикла обмена навигационной информацией и формируют общие сигналы синхронизации для первого и второго способов, используют упомянутые сигналы при передаче и приеме навигационной информации и определении упомянутой локационной информации, а настройку корректируемой шкалы времени выполняют по выходным сигналам упомянутой комплексной обработки временных параметров сигналов синхронизации первого и второго способов.
Предлагается вариант способа, в котором оценивают точность формирования общих сигналов синхронизации, включают полученные оценки точности в общий пакет информации и передают их через упомянутые каналы информационного обмена.
Предлагается вариант способа, в котором формирование сигналов синхронизации первого способа выполняют одновременно с определением навигационной информации каждого ЛА по созвездию спутников.
Предлагается вариант способа, в котором для оценивания точности формирования общих сигналов синхронизации используют алгоритм калмановской фильтрации, причем точность формирования сигналов синхронизации первого способа оценивается одновременно с определением навигационной информации каждого ЛА по созвездию спутников, а точность формирования сигналов синхронизации действий второго способа оценивается с учетом условий распространения зондирующих сигналов при их передаче и приеме.
Предлагается вариант способа, в котором при межсамолетной навигации более двух ЛА, в случае существенного различия оценок точности синхронизации, комплексная обработка временных параметров сигналов синхронизации первого и второго способов выполняется на всех ЛА, кроме одного, имеющего наилучшую оценку точности формирования общих сигналов синхронизации.
Предлагается вариант способа, в котором зондирующие сигналы при определении локационной информации используются одновременно в качестве сигналов синхронизации второго способа.
Суть заявляемого способа поясняется с помощью Фиг. 1, 2, 3 и Приложений 1, 2.
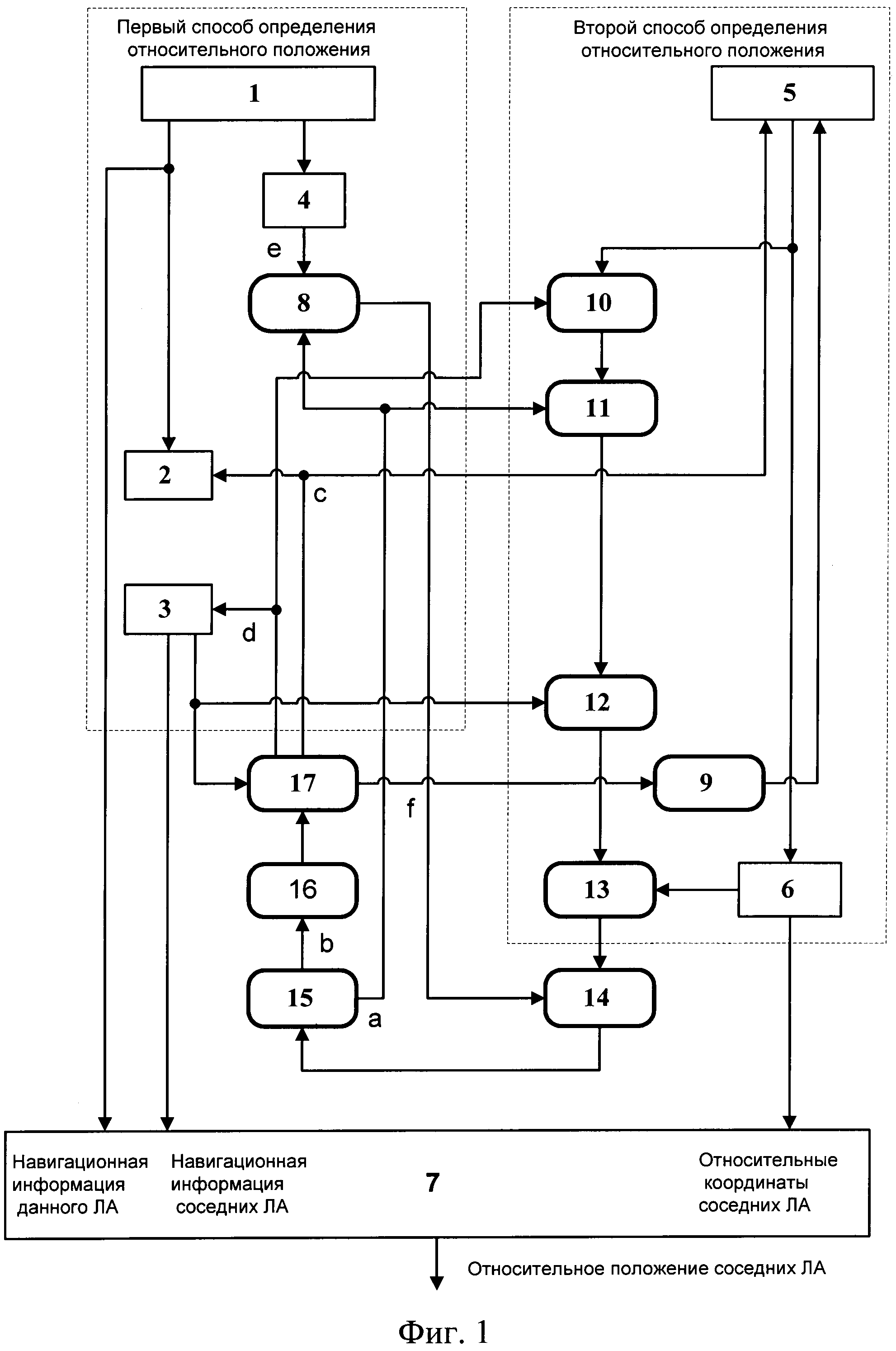
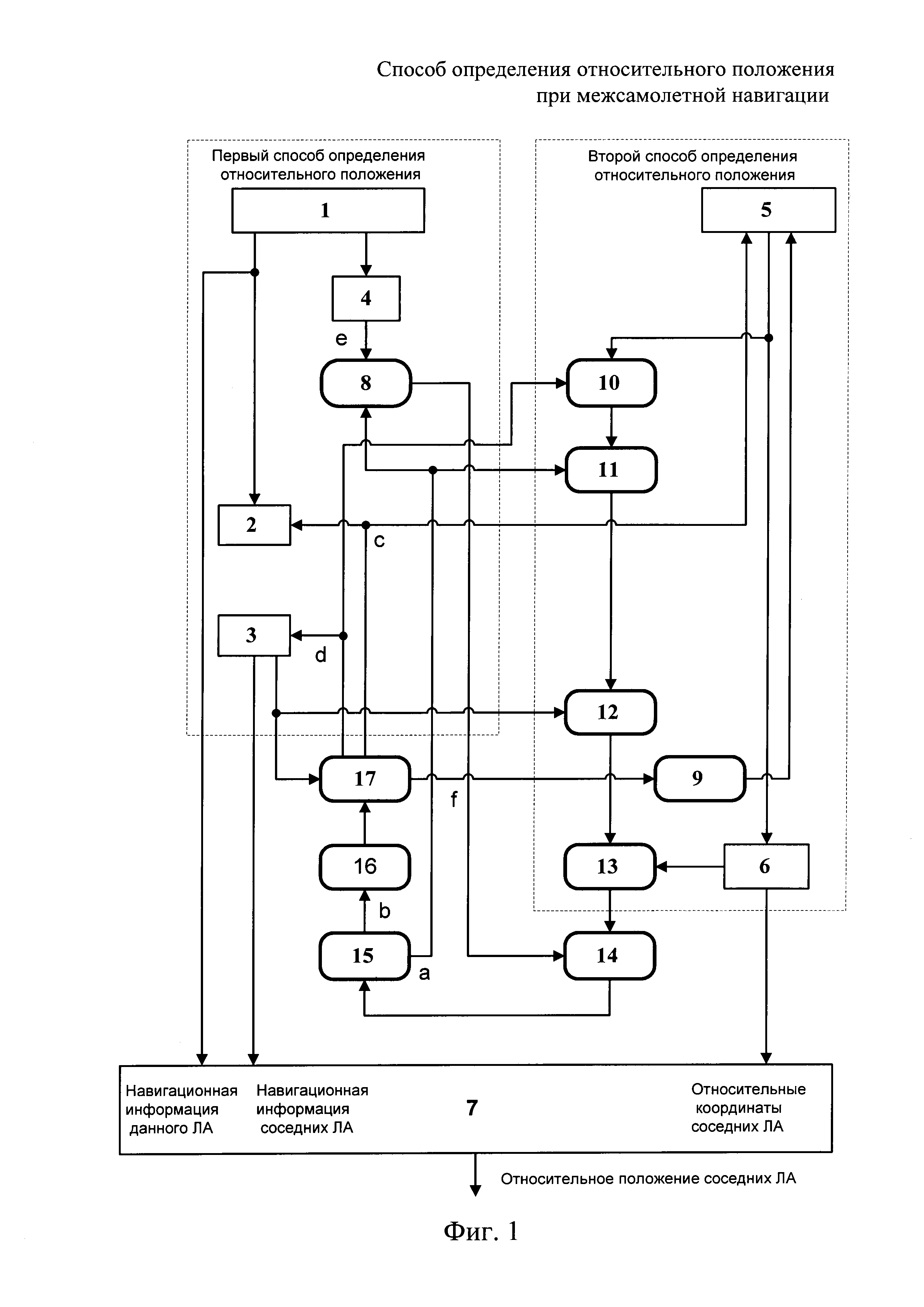
На Фиг. 1 представлена блок-схема основной последовательности операций предложенного способа определения относительного положения ЛА. Операции, используемые в способе-прототипе, выделены прямоугольниками с тонкими линиями, вновь предложенные операции выделены прямоугольниками с толстыми линиями и закругленными углами.
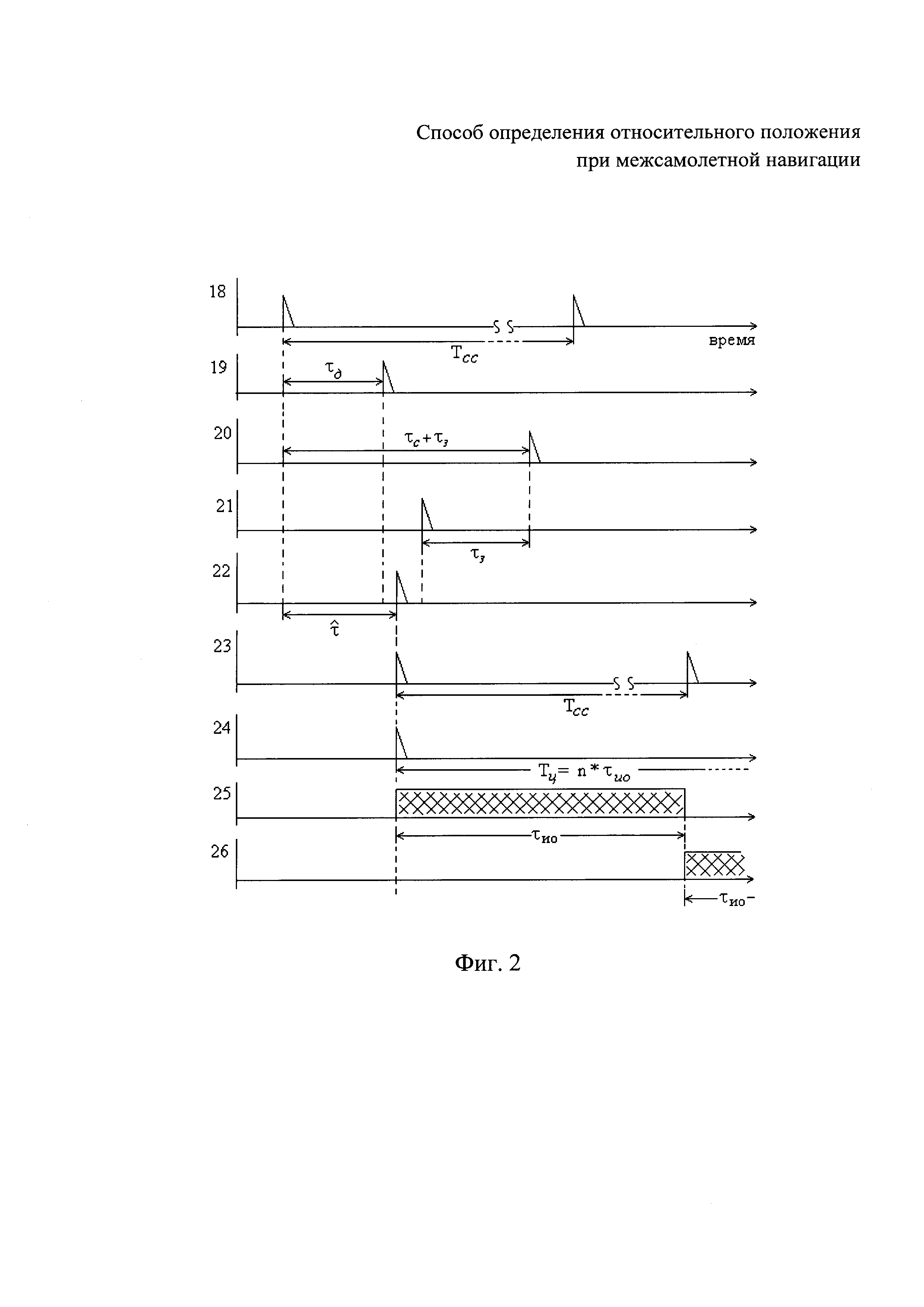
На Фиг. 2 приведены временные диаграммы, иллюстрирующие измерение времени прихода сигналов синхронизации первого и второго способов и формирование общих сигналов синхронизации.
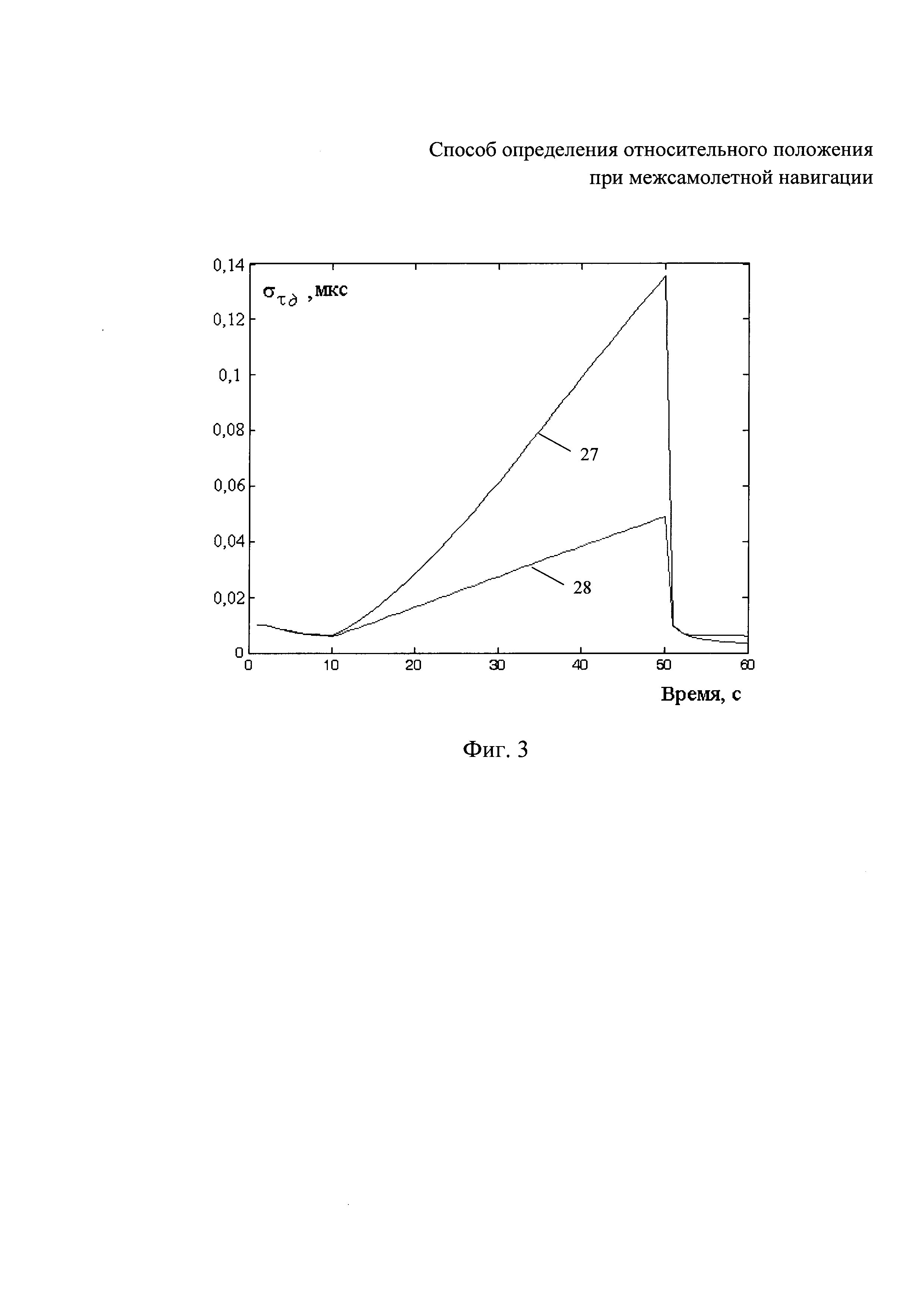
Фиг. 3 поясняет точность комплексной обработки временных параметров сигналов синхронизации при кратковременных отключениях спутникового сигнала (в случае нарушения работоспособности первого способа).
В Приложении 1 приведена временная диаграмма, иллюстрирующая временное разделение информационного обмена в режиме TDMA.
В Приложении 2 приведена блок-схема последовательности действий по способу-прототипу с расшифровкой обозначений.
Рассмотрим действия предлагаемого способа в соответствии с Фиг. 1.
На Фиг. 1 приняты следующие обозначения:
1. Определение навигационной информации каждого ЛА по созвездию спутников.
2. Передача навигационной информации соседним ЛА через каналы информационного обмена с временным разделением.
3. Прием навигационной информации соседних ЛА через каналы информационного обмена с временным разделением.
4. Формирование сигналов синхронизации для временного разделения передачи и приема навигационной информации. Выход «е» - сигнал синхронизации данного ЛА первого способа.
5. Определение локационной информации с помощью передачи и приема зондирующих сигналов каждым ЛА.
6. Определение относительных дальностей соседних ЛА.
7. Комплексная обработка информации об относительном положении ЛА.
8. Измерение времени прихода сигналов синхронизации данного ЛА по первому способу.
9. Передача сигналов синхронизации соседним ЛА.
10. Выделение сигналов синхронизации соседних ЛА второго способа.
11. Измерение времени прихода сигналов синхронизации соседних ЛА второго способа.
12. Преобразование времени прихода сигналов синхронизации соседних ЛА к рабочему временному интервалу данного ЛА.
13. Компенсация временных задержек сигналов синхронизации соседних ЛА.
14. Комплексная обработка временных параметров сигналов синхронизации первого и второго способов.
15. Формирование и настройка корректируемой шкалы времени. Выход «а» - сигналы исходной шкалы времени. Выход «b» - сигналы корректированной шкалы времени.
16. Определение начала цикла обмена навигационной информацией.
17. Формирование общих для первого и второго способов сигналов синхронизации.
Выход «с» - рабочий временной интервал данного ЛА. Выход «d» - рабочий временной интервал соседних ЛА. Выход «f» - сигнал синхронизации данного ЛА для передачи соседним ЛА.
Способ включает общие со способом-прототипом действия (см. Приложение 2): определение навигационной информации каждого ЛА по созвездию спутников 1, передачу навигационной информации соседним ЛА через каналы информационного обмена с временным разделением 2, прием навигационной информации соседних ЛА через упомянутые каналы 3, формирование сигналов синхронизации для временного разделения передачи и приема навигационной информации 4, определение локационной информации с помощью передачи и приема зондирующих сигналов каждым ЛА 5, определение относительных дальностей соседних ЛА 6, комплексную обработку информации об относительном положении ЛА 7. Операции 1-4 составляют 1-й способ определения относительного положения, а операции 5 и 6 составляют 2-й способ.
Предложены новые действия, реализующие заявленный способ. Новизна способа, согласно Фиг. 1, состоит в том, что в процессе определения навигационной информации каждого ЛА по созвездию спутников 1 выполняется формирование не только навигационной информации (координат) данного ЛА и формирование сигналов синхронизации для временного разделения передачи и приема навигационной информации 4 (как в прототипе), но и измерение времени прихода сигналов синхронизации данного ЛА первого способа 8 относительно исходной шкалы времени данного ЛА в операции 15, выход «а», и это измерение в дальнейшем используется для комплексной обработки временных параметров сигналов синхронизации первого и второго способов 14. При этом координаты данного ЛА включаются в навигационную информацию для передачи соседним ЛА через каналы информационного обмена с временным разделением 2, а также используются в комплексной обработке информации об относительном положении ЛА 7. Также (как в прототипе) выполняется прием навигационной информации (координат) соседних ЛА через каналы информационного обмена с временным разделением 3, которая используется в комплексной обработке информации об относительном положении ЛА 7. В процессе приема навигационной информации соседних ЛА 3 также принимается информация о рабочем временном интервале информационного обмена соседних ЛА, которая используется при формировании общих для первого и второго способов сигналов синхронизации 17 и для преобразования времени прихода сигналов синхронизации соседних ЛА к рабочему временному интервалу данного ЛА 12.
В процессе определения локационной информации с помощью передачи и приема зондирующих сигналов каждым ЛА 5 выполняется определение не только локационной информации и определение относительных дальностей соседних ЛА 6 (как в прототипе), но и осуществляется передача сигналов синхронизации соседним ЛА 9 и выделение сигналов синхронизации соседних ЛА второго способа 10 (канал передачи и приема зондирующих сигналов используется также для передачи и приема сигналов синхронизации). Далее выполняется измерение времени прихода сигналов синхронизации соседних ЛА второго способа 11 относительно исходной шкалы времени данного ЛА в операции 15, выход «а». Поскольку сигнал синхронизации соседнего ЛА второго способа приходит в своем (для соседнего ЛА) рабочем временном интервале информационного обмена, выполняется преобразование упомянутого времени прихода сигнала синхронизации соседнего ЛА к рабочему временному интервалу данного ЛА 12. Затем осуществляется компенсация временных задержек сигналов синхронизации соседних ЛА 13 с помощью определенных относительных дальностей соседних ЛА 6. Результаты измерений временных параметров сигналов синхронизации по первому и второму способу 8 и 13 подвергаются комплексной обработке в 14, результаты которой используются для формирования и настройки (на основе исходной шкалы времени) корректируемой шкалы времени 15, формирования начала цикла обмена навигационной информацией 16 и формирования общих для первого и второго способов сигналов синхронизации 17.
Работа заявляемого способа происходит следующим образом. Действия 2 и 3, а также 6 и 7 выполняются полностью аналогично прототипу.
Определение навигационной информации ЛА по созвездию спутников 1 включает в себя, помимо определения пространственных координат ЛА, еще и выделение (из приемника спутниковой навигационной системы) и формирование сигналов синхронизации первого способа 4, которые в дальнейшем используются для формирования общих сигналов синхронизации 17.
Определение локационной информации с помощью передачи и приема зондирующих сигналов 5 включает в себя, помимо передачи и приема зондирующих сигналов дополнительно передачу сигналов синхронизации соседним ЛА 9, а также прием и выделение сигналов синхронизации соседних ЛА второго способа 10. При этом зондирующие сигналы и сигналы синхронизации кодируются (например, с помощью времяимпульсного кода [13]). Для передачи используются общие для первого и второго способов сигналы синхронизации, сформированные операцией 17 (передача осуществляется в рабочем временном интервале информационного обмена данного ЛА). Прием и выделение сигналов синхронизации соседних ЛА осуществляется в рабочем временном интервале информационного обмена соседних ЛА. Определение локационной информации с помощью передачи и приема зондирующих сигналов 5 осуществляется в рабочем временном интервале информационного обмена данного ЛА.
Измерение времени прихода сигналов синхронизации данного ЛА первого способа 8 и соседних ЛА второго способа 11 иллюстрируется на Фиг. 2, где приняты следующие обозначения:
18. Сигналы исходной шкалы времени с периодом повторения Тсс (выход «а» операции 15 на Фиг. 1).
19. Сигнал синхронизации данного ЛА первого способа (выход «е» операции 4).
20. Сигнал синхронизации соседнего ЛА (до компенсации) после преобразования к рабочему интервалу (выход операции 12).
21. Сигнал синхронизации соседнего ЛА после компенсации (выход операции 13).
22. Сигнал синхронизации после комплексной обработки 14.
23. Последовательность сигналов для формирования корректируемой и настраиваемой шкалы времени (выход «b» операции 15).
24. Сигнал начала цикла обмена навигационной информации с периодом Tц.
25. Рабочий временной интервал длительностью τио информационного обмена данного ЛА (выход «с» операции 17).
26. Начало рабочего временного интервала длительностью τио информационного обмена соседнего ЛА (выход «d» операции 17).
Бортовой генератор формирует исходную шкалу времени, представляющую собой интервальную временную сетку, (диаграмма 18 на Фиг. 2) с периодом повторения сигналов синхронизации Тсс (выход «а» операции 15 на Фиг. 1). Относительно этой временной сетки измеряется время прихода сигнала синхронизации (выход «е» операции 4 на Фиг. 1, диаграмма 19 на Фиг. 2) данного ЛА первого способа 8 τ∂ и соседнего ЛА второго способа τс* (сигнал синхронизации соседнего ЛА приходит в своем рабочем временном интервале информационного обмена и на Фиг. 2 не показан).
Один из временных интервалов (например, первый, показанный на диаграмме 25 Фиг. 2) используется как рабочий интервал для данного ЛА, т.е. для передачи навигационной информации и определения локационной информации (выход «с» операции 17 на фиг. 1). Остальные временные интервалы используются для приема навигационной информации и выделения сигналов синхронизации соседних ЛА (выход «d» операции 17 на фиг. 1). Информация о номере рабочего временного интервала информационного обмена соседнего ЛА «k» известна (получена в результате приема навигационной информации соседних ЛА 3), поэтому выполняется преобразование времени прихода сигналов синхронизации соседних ЛА к рабочему временному интервалу данного ЛА 12 по формуле (1):

где
τc+τз - время прихода сигнала синхронизации соседнего ЛА после преобразования к рабочему интервалу данного ЛА;
τз - время распространения сигнала соседнего ЛА; τс* - время прихода сигнала синхронизации соседнего ЛА в своем рабочем временном интервале информационного обмена;
k - номер рабочего временного интервала информационного обмена соседнего ЛА;
τио - длительность интервала информационного обмена.
Результат такого преобразования показан на диаграмме 20 Фиг. 2. При этом сигнал синхронизации соседнего ЛА задержан на величину τз, соответствующую времени распространения сигнала (2):

где D - относительная дальность соседнего ЛА, с - скорость распространения сигнала.
Относительная дальность определяется (операция 6) и величина τз вычитается из результата измерения времени прихода сигналов синхронизации соседнего ЛА после преобразования 12 (компенсация временных задержек сигналов синхронизации соседних ЛА 13). Результат показан на диаграмме 21 Фиг. 2.
Таким образом, временные параметры сигналов синхронизации первого и второго способов включают в себя сигнал синхронизации данного ЛА первого способа τ∂ и соседнего ЛА второго способа τс.
Комплексная обработка временных параметров сигналов синхронизации первого и второго способов 14 строится на базе алгоритма фильтра Калмана [10] (на диаграмме 22 Фиг. 2 показан сигнал синхронизации после комплексной обработки 14).
По результатам комплексной обработки временных параметров сигналов синхронизации первого и второго способов 14 формируется и настраивается корректируемая шкала времени 15. При этом формируются сигналы синхронизации с периодом повторения Тсс (выход «б» операции 15 на Фиг. 1, диаграмма 23 на Фиг. 2). Далее определяется начало цикла обмена навигационной информации 16 и формируется сигнал начала цикла (диаграмма 24 на Фиг. 2) с периодом Тц, а также формируются общие для первого и второго способов сигналы синхронизации 17 (n временных интервалов информационного обмена длительностью τио - выходы «d» и «с» операции 17 на Фиг. 1). Кроме того формируется сигнал синхронизации данного ЛА для передачи соседним ЛА (выход «f» операции 17 на Фиг. 1).
Рассмотрим пример построения комплексной обработки временных параметров сигналов синхронизации данного и соседнего ЛА на основе фильтра Калмана. При необходимости этот алгоритм может быть расширен на несколько соседних ЛА.
Вектор состояния бортовых часов в дискретном времени i Y(i)=(τ(i) vt(i))T содержит задержку τ(i) и скорость ее изменения vt(i). Разностное уравнение состояния имеет вид (3):

где V(i) - 2-мерный вектор дискретного белого шума с известной корреляционной матрицей  - матрица перехода; Δt - интервал временной дискретизации.
- матрица перехода; Δt - интервал временной дискретизации.
Матрица  , где S - спектральная плотность белого шума, зависящая от свойств бортового генератора.
, где S - спектральная плотность белого шума, зависящая от свойств бортового генератора.
По данным [9] значение S=7.79*10-19 для генератора ГК99 фирмы "Марион" и S=7.79*10-22 для ГК89ТС той же фирмы.
Наблюдаемый вектор Z(i) содержит измерения задержек τ∂ и τc и имеет вид (4):

где  ; N(i) - вектор дискретного белого шума с известной корреляционной матрицей
; N(i) - вектор дискретного белого шума с известной корреляционной матрицей  ;
;  и
и  - дисперсии ошибок оценивания времени прихода τ∂ и τс, соответственно.
- дисперсии ошибок оценивания времени прихода τ∂ и τс, соответственно.
Дисперсию  можно получить от спутникового приемника.
можно получить от спутникового приемника.
При определении  следует, кроме ошибки формирования, дополнительно учесть ошибку фиксации времени прихода сигнала и точность определения дальности (5):
следует, кроме ошибки формирования, дополнительно учесть ошибку фиксации времени прихода сигнала и точность определения дальности (5):

где
 - дисперсия ошибки формирования сигнала синхронизации соседнего ЛА;
- дисперсия ошибки формирования сигнала синхронизации соседнего ЛА;
 - дисперсия ошибки фиксации временного положения сигнала;
- дисперсия ошибки фиксации временного положения сигнала; 
 - дисперсия ошибки определения дальности.
- дисперсия ошибки определения дальности.
По формуле Вудворда [8] вычисляется дисперсия ошибки фиксации временного положения сигнала (6):

где q - отношение сигнал/шум в канале синхронизации; Δƒ - эффективная ширина спектра сигнала синхронизации.
Аналогичная формула используется и для вычисления дисперсии ошибки определения дальности.
Оптимальная оценка задержки τ(i) и скорости ее изменения vt(i):
 равна
равна

где K(i) - оптимальный коэффициент усиления;  .
.
Расчет оптимального коэффициента производится с помощью выражений:
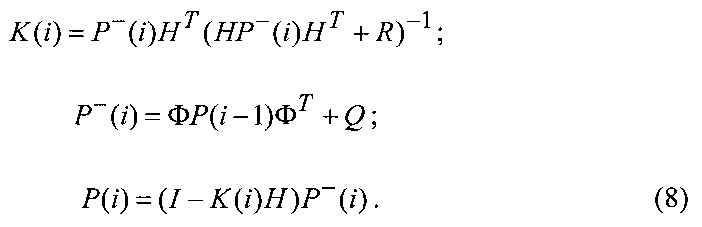
В результате решения уравнения (7) получается оптимальная комплексная оценка задержки  . На диаграмме 22 Фиг. 2 показан сигнал синхронизации с задержкой
. На диаграмме 22 Фиг. 2 показан сигнал синхронизации с задержкой  после комплексной обработки 14.
после комплексной обработки 14.
Решение уравнения (8) содержит дисперсию ошибки оценивания задержки (элемент матрицы P(i): Р[1,1). Среднеквадратическое значение ошибки определяется выражением (9):

и включается в общий пакет информационного обмена.
При кратковременных пропаданиях сигнала спутникового канала τ∂ оценка не формируется и обрабатывается только оценка τс. При этом  и со временем происходит постепенное ухудшение точности синхронизации в соответствии с качеством используемого эталона времени.
и со временем происходит постепенное ухудшение точности синхронизации в соответствии с качеством используемого эталона времени.
Моделирование алгоритма фильтрации показывает, что при кратковременных пропаданиях спутникового сигнала (например, при маневрах ЛА с большими значениями угла крена) алгоритм фильтрации позволяет сохранить высокую точность формирования сигналов синхронизации. Для примера, на Фиг. 3 приведены результаты оценки ошибки синхронизации при пропадании спутникового сигнала с 10-ой до 50-ой секунды моделируемого времени для значений σ∂=0,01 мкс и σс=1,0 мкс. На Фиг. 3 видно, что при перерыве приема спутникового сигнала значение ошибки синхронизации достигало уровня 0,136 мкс и 0,04 мкс при использовании генераторов ГК99 (кривая 27) и ГК89ТС (кривая 28), соответственно. Отметим, что эти значения ошибки намного меньше, чем σc.
Ниже рассмотрены варианты, развивающие и уточняющие предложенный способ.
Предлагается вариант способа, в котором оценивают точность формирования общих сигналов синхронизации, включают полученные оценки точности в общий пакет информации и передают их через упомянутые каналы информационного обмена. Для оценки точности формирования общих сигналов синхронизации используется выражение (5).
Предлагается вариант способа, в котором формирование сигналов синхронизации первого способа выполняют одновременно с определением навигационной информации каждого ЛА по созвездию спутников. При этом используются вырабатываемые спутниковым приемником метки времени (Pulse Per Second signals: PPS), следующие с заданным временным интервалом [6].
Предлагается вариант способа, в котором для оценивания точности формирования общих сигналов синхронизации используют алгоритм калмановской фильтрации, причем точность формирования сигналов синхронизации первого способа оценивается одновременно с определением навигационной информации каждого ЛА по созвездию спутников, а точность формирования сигналов синхронизации действий второго способа оценивается с учетом условий распространения зондирующих сигналов при их передаче и приеме.
Для оценки точности формирования сигналов синхронизации первого способа используется результат вычислений корреляционной матрицы ошибок измерения координат и времени (Position Covariance Matrix), выполняемых в приемнике спутниковой навигационной системы, причем дисперсия ошибки измерений времени  обычно [6] определяется в метрах в квадрате (м2) и ее следует пересчитать по формуле:
обычно [6] определяется в метрах в квадрате (м2) и ее следует пересчитать по формуле:

Оценка точности формирования сигналов синхронизации действий второго способа выполняется с использованием выражений (5)-(6).
Предлагается вариант способа, в котором при межсамолетной навигации более двух ЛА, в случае существенного различия оценок точности синхронизации, комплексная обработка временных параметров сигналов синхронизации первого и второго способов выполняется на всех ЛА, кроме одного, имеющего наилучшую оценку точности формирования общих сигналов синхронизации. В этом варианте формирование корректируемой шкалы времени на ЛА, имеющем наилучшую оценку точности формирования сигналов синхронизации, выполняется исключительно по сигналам синхронизации данного ЛА.
Предлагается вариант способа, в котором зондирующие сигналы при определении локационной информации используются одновременно в качестве сигналов синхронизации второго способа. В этом варианте появляется возможность отказаться от излучения ответных зондирующих сигналов и измерять относительные дальности в однопутевом (псевдодальномерном) режиме, так как моменты излучения зондирующих сигналов известны на всех ЛА.
Таким образом, в предложенном способе введены новые операции и новые сочетания их с известными операциями, связанные с совместной обработкой временных параметров сигналов синхронизации двух способов определения относительного положения ЛА, причем сигналы синхронизации второго способа преобразуются к рабочему временному интервалу данного ЛА, а по результатам совместной обработки формируется корректируемая шкала времени, обеспечивающая разделение времени приема и передачи навигационной информации, а также получения локационной информации.
При этом существенно, что наличие дополнительной (избыточной) информации относительно временных параметров сигналов синхронизации повышает надежность и точность операций формирования сигналов синхронизации при определении относительного положения ЛА.
Указанные операции определяют существенную новизну предложенного способа. Эффективность предложенного способа подтверждена результатами имитационного цифрового и полунатурного моделирования на комплексных стендах при разработке и отладке программного обеспечения бортовых навигационно-посадочных комплексов перспективных ЛА. При этом во втором способе определения относительного положения соседних ЛА по отношению к данному ЛА применен дальномерный метод с использованием сложного фазоманипулированного зондирующего сигнала (погрешность измерения дальности с вероятностью 0,95 не превышала 1,2 м, что соответствует погрешности измерения временных параметров сигналов синхронизации второго способа около 4 нс и примерно на порядок превышает точность формирования сигналов синхронизации первого способа.
Проведенные летные проверки на двух самолетах типа Су-21 показали техническую целесообразность и эффективность предложенного способа.
Заявляемое изобретение является перспективным для решения проблем повышения надежности и точности перспективных систем межсамолетной навигации и, в конечном итоге, для снижения вероятности авиационных катастроф.
Таким образом, из вышеприведенного следует новизна и полезность предложенного способа.
Литература
1. Информационная система межсамолетной навигации: пат. №2222781, Рос. Федерация. №2002101344/28; заявл. 10.01.00; опубл. 27.01.2004.
2. Method and system for automatic control of the flight formation of unmanned aerial vehicles: UK Patent GB №2476149; Date of Publication 16.07.2014.
3. Autonomous station keeping system for formation flight: Patent Application Publication № US 2005/0055143; Pub. Data: Mar. 10, 2005.
4. Automatic formation flight control system (AFFCS) - a system for automatic formation flight control of vehicles not limited to aircraft, helicopters, or space platforms: United States Patent. № US 6,926,23; Date of Patent: Aug. 9, 2005.
5. Дальномерная радиотехническая система ближней навигации летательных аппаратов: пат. №2478979: Рос. Федерация. №2002101344/28; заявл. 11.11.2011; опубл. 10.04.2013.
6. Navstar GPS Space Segment/Navigation User interfaces, ICD-GPS-200C // ARINC Research Corporation, 10 October 1993. Режим доступа http://www.arinc.com/gps.
7. Сосновский А.А. и др. Авиационная радионавигация, справочник. - М.: Транспорт, 1990.
8. Радиотехнические системы / под ред. Ю.М. Казаринова. - М.: Изд.центр «Академия», 2009.
9. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Перова, В.Н. Харисова. 4-е изд. М.: Радиотехника. - 800 с.
10. Roger R.M. Applied mathematics in integrated navigation systems. AIAA, 2007.
11. Apparatus and method for generating low latency position information from position signals transmitted in a narrow bandwidth: заявка на пат. США 2013/0069815; опубл. 21.03.2013.
12. Apparatus and method for generating low latency position information from position signals transmitted in a narrow bandwidth channel of a radio frequency: пат. 8692705 США. №2013/0069815; заявл. 21.03.13; опубл. 08.04.2014.
13. Орлов В.К., Герчиков А.Г., Чернявский А.Г. Локальные радиотехнические системы межсамолетной навигации: СПб., Изд. СПбГЭТУ «ЛЭТИ», 2011. 123 с.
Дальномерная радиотехническая система ближней навигации летательных аппаратов
Многоцелевая самолетная антенно-фидерная система
Комплексный способ навигации летательных аппаратов
Способ инерциально-спутниковой навигации летательных аппаратов
Комплексный способ навигации летательных аппаратов
Способ определения относительного положения летательных аппаратов при межсамолетной навигации
Дальномерная радиотехническая система ближней навигации летательных аппаратов
Многоцелевая самолетная антенно-фидерная система
Комплексный способ навигации летательных аппаратов
Способ инерциально-спутниковой навигации летательных аппаратов
Комплексный способ навигации летательных аппаратов
Способ определения относительного положения летательных аппаратов при межсамолетной навигации
Стабилизатор напряжения аппаратуры электропитания посадочного радиолокатора
Способ контроля достоверности данных системы автоматического зависимого наблюдения
Система предупреждения столкновения летательного аппарата с землей
Способ посадки летательных аппаратов с использованием спутниковой навигационной системы и система посадки на его основе

