Результат интеллектуальной деятельности: СПОСОБ СТАБИЛИЗАЦИИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Изобретение относится к способу стабилизации рельсового транспортного средства с колесной парой, при котором скорость рельсового транспортного средства изменяется при возникновении критического колебательного состояния колесной пары.
Рельсовые транспортные средства содержат обычно со стороны оси жестко соединенные в колесную пару колеса. Для движения по рельсу колеса имеют обычно конические профили, наружные диаметры которых уменьшаются к наружной стороне транспортного средства. Несмотря на попарное жесткое соединение колес, этот вид профилирования обеспечивает малоизнашивающееся и малошумное прохождение кривых, поскольку обусловленные кривой путевые отличия между внутренними и внешними относительно кривой колесами могут компенсироваться за счет движений качения по разным наружным диаметрам.
При движении с высокой скоростью на прямом участке пути или по кривым с большими радиусами профилированная таким образом колесная пара может попасть в критическое колебательное состояние. Этой вызванной таким образом неустойчивости может сопутствовать, в частности, чрезмерная нагрузка на полотно дороги или ухудшение комфорта для пассажиров.
Задачей изобретения является создание способа, который позволил бы надежно стабилизировать рельсовое транспортное средство.
Эта задача решена посредством способа описанного выше рода, при котором, согласно изобретению, скорость рельсового транспортного средства изменяется с использованием параметра колебательного состояния колесной пары.
При этом изобретение исходит из того факта, что продолжительное снижение скорости до заданного значения, которое у высокоскоростного поезда может составлять 180 км/ч и менее, может привести к снижению точности расписания движения и снижению пунктуальности рельсового транспортного средства. Согласно изобретению, скорость изменяется с использованием параметра колебательного состояния, так что изменение может быть приведено в функциональную зависимость от параметра колебательного состояния. Изменение в качестве функции параметра колебательного состояния может также варьироваться с его изменением. Следовательно, можно достичь изменения скорости для стабилизации рельсового транспортного средства, соразмерного по продолжительности, виду и/или объему фактическим обстоятельствам критического колебательного состояния. Таким образом, можно, во-первых, выполнить требования техники безопасности, а, во-вторых, избежать чрезмерного по продолжительности и объему уменьшения скорости. В частности, после уменьшения скорости можно снова повысить ее, в частности в зависимости от параметра колебательного состояния, и за счет этого достичь повышения точности расписания движения и повышения пунктуальности рельсового транспортного средства.
Под стабилизацией рельсового транспортного средства в смысле изобретения можно понимать ослабление продольного колебания его колесной пары. Это ослабление может достигаться уменьшением сил возбуждения колебания, изменением гашения колебания и т.п.
Колесная пара может включать в себя два колеса, соединенных между собой без возможности вращения посредством оси или вала. Колесная пара может быть расположена на тележке. Преимущественно на одной тележке расположены две колесные пары. Колесная тележка может быть расположена на нижней стороне рельсового транспортного средства с возможностью вращения вокруг его вертикальной оси. Преимущественно тележка включается в себя демпфер, называемый также демпфером виляния, для демпфирования вращательного движения тележки.
Под критическим колебательным состоянием колесной пары можно понимать колебательное состояние, при котором его параметр, например ускорение, по величине достигает и/или превышает заданное предельное значение. Заданное предельное значение может быть установлено соответствующей нормой.
Параметром колебательного состояния может быть зависимый от времени параметр, например отклонение, скорость или ускорение, который, при необходимости вместе с другим параметром, однозначно описывает состояние периодически движущейся системы. Стабилизации рельсового транспортного средства может сопутствовать уменьшение по величине параметра колебательного состояния колесной пары.
Колебание S(t) рельсового транспортного средства зависит от его скорости v(t) и от других параметров, так как направление пути, состояние пути, эквивалентная конусность, боковой ветер, загрузка рельсового транспортного средства и т.п.: S(t) = f(v(t), …, t). Функцию f(v(t), …, t) трудно аналитически установить вследствие ее высокой изменчивости. Тем не менее, в блоке управления рельсового транспортного средства целесообразно хранится функция φ, которая указывает функциональную взаимосвязь между параметром s колебательного состояния и скоростью рельсового транспортного средства, в частности со скоростью в качестве зависимой переменной v = φ(s), где v и s, в свою очередь, могут зависеть от времени t, а φ может зависеть от других переменных. Функция φ указывает целесообразно для различных величин параметра s колебательного состояния различные скорости v, причем каждому параметру s колебательного состояния может быть однозначно придана скорость v. Вместо скорости v может использоваться изменение dv/dt или v’ скорости. Изменение скорости v рельсового транспортного средства, т.е. градиент скорости и/или конечная точка изменения, следовательно, целевая скорость, происходит целесообразно с использованием функции φ, так что при наличии критического колебательного состояния уменьшение происходит в зависимости от параметра колебательного состояния в соответствии с функцией φ. Разные величины параметра колебательного состояния могут, тем самым, привести к разным изменениям скорости.
Предпочтительно изменение скорости происходит, по меньшей мере, главным образом автоматически, т.е. с предотвращением ручного вмешательства машиниста. Таким образом, предотвращается чрезмерно сильное по продолжительности и величине или объему уменьшение, т.е. уменьшение, выходящее за пределы уменьшения, достаточного по времени и/или по величине для стабилизации рельсового транспортного средства, повышается его достигаемая средняя скорость, и, тем самым, обеспечивается повышение точности расписания движения или повышение пунктуальности.
В одном предпочтительном варианте параметр колебательного состояния используется в качестве регулируемого параметра для изменения скорости. Целесообразно скорость изменяется таким образом, что параметр колебательного состояния по величине не достигает заданного предельного значения. Преимущественно параметр колебательного состояния регистрируется посредством измерительной техники с заданными интервалами времени, предпочтительно непрерывно или квазинепрерывно. Целесообразно параметр колебательного состояния сравнивается с заданным значением, и скорость изменяется в зависимости от разности между заданным и зарегистрированным значениями. Предпочтительно, если скорость изменяется в пределах контура регулирования параметра колебательного состояния. В пределах контура регулирования скорость может быть управляющим параметром.
В другом варианте параметром колебательного состояния является ускорение. Ускорением может быть, в частности, проходящее, в основном, поперек направления движения рельсового транспортного средства ускорение, т.е. поперечное или боковое. Ускорением может быть ускорение элемента рельсового транспортного средства, в частности колеса, колесной пары или тележки.
Целесообразно ускорение определяется на тележке рельсового транспортного средства. Возможно также определение ускорения на колесной паре, колесе и/или другом элементе рельсового транспортного средства. Определение может осуществляться с помощью предназначенного для этого измерительного устройства. Измерительное устройство может содержать датчик, предпочтительно пьезоэлектрический датчик ускорения. Предпочтительным образом определение параметра колебательного состояния может осуществляться с помощью датчика перемещений, в частности в комбинации с устройством измерения времени.
В одном предпочтительном варианте скорость повышается, если рельсовое транспортное средство прошло заданную область движения в пределах некритического диапазона колебательного состояния. Под областью движения в смысле изобретения можно понимать продолжительность движения или участок движения, в общем, продолжительность или участок. Например, заданной областью движения может быть продолжительность движения 30 мин, участок движения 50 км и т.п. Предпочтительно, если заданы несколько областей движения, в частности в зависимости от текущей скорости рельсового транспортного средства.
Другими словами, способ может выполняться таким образом, что скорость уменьшается при возникновении критического колебательного состояния колесной пары, наступающего, например, при 275 км/ч, вплоть до стабилизации рельсового транспортного средства или достаточного уменьшения параметра колебательного состояния. Уменьшенная таким образом скорость может составлять, например, 254,5 км/ч. После прохождения рельсовым транспортным средством заданной области движения, например, 20 км без возникновения нового критического колебательного состояния скорость снова повышается. Таким образом, минимизируется возможное отклонение от расписания, т.е. потеря времени вследствие предыдущего, обусловленного нестабильностью уменьшения скорости, и повышается пунктуальность рельсового транспортного средства.
На нестабильность может влиять параметр транспортного средства и/или полотна дороги. Например, изношенный или поврежденный отрезок пути может повлиять на возникновение критического колебательного состояния. За счет задавания области движения вплоть до нового повышения скорости предотвращается, в частности, повторное возникновение критического колебательного состояния на таком отрезке пути из-за преждевременного повышения скорости.
Целесообразным является то, что скорость снова повышается после того, как рельсовое транспортное средство пройдет область движения с заданной средней скоростью. Средняя скорость может составлять, например, 70-80%, предпочтительно 80-95%, скорости, достигнутой непосредственно после изменения скорости в соответствии со способом. За счет этого можно избежать повышения скорости преждевременно или перед прохождением достаточно длинного участка движения и нового критического колебательного состояния за счет слишком быстрого движения по изношенному отрезку пути.
На колебательное состояние или колебание колесной пары решающим образом могут влиять действующие на колесную пару или на ее колеса силы. В частности, на колебание колесной пары могут влиять торможение рельсового транспортного средства и возникающие при этом силы трения между колесом и рельсом. Поэтому может произойти так, что рельсовое транспортное средство за счет процесса торможения и сопутствующего ему уменьшения скорости стабилизируется, однако после, по меньшей мере, преобладающего уменьшения тормозной силы, т.е. при, по меньшей мере, частичном отпускании тормоза, снова возникнет критическое колебательное состояние.
В частности, поэтому оказалось предпочтительным определять отличную от измененной скорости максимальную скорость рельсового транспортного средства в зависимости от измененной скорости. Целесообразным является то, что эта максимальная скорость ниже измененной скорости, так что возникновения критического колебательного состояния вследствие частичного или полного изменения тормозной силы можно простым образом избежать.
Целесообразно определять максимальную скорость в виде произведения коэффициента безопасности и измененной скорости. Коэффициент безопасности может составлять 0,85-0,95, предпочтительно 0,95-0,99. В частности, с коэффициентом безопасности 0,98 можно достичь достаточной стабилизации рельсового транспортного средства при минимально дополнительно уменьшенной скорости.
Предпочтительным образом максимальная скорость ограничена областью движения, так что после ее прохождения скорость может быть повышена выше максимальной скорости.
Способ может выполняться таким образом, что при возникновении нестабильности в результате колебания скорость уменьшается вплоть до стабилизации рельсового транспортного средства, определяется соответствующая максимальная скорость или ограничение скорости и целесообразно ставится в зависимость от параметра колебательного состояния.
Если в пределах области движения – ею может быть участок движения или продолжительность движения – не возникнет новой нестабильности, то установленное последним ограничение скорости устраняется. В соответствии со способом можно во время движения в нескольких нестабильных режимах последовательно установить несколько ограничений скорости. Для повышения скорости оказалось предпочтительным, если ограничения скорости устраняются после прохождения заданной области движения последовательно, т.е. сначала установленного по времени последним, затем установленного по времени предпоследним и т.д. В этой связи можно говорить о приближении рельсового транспортного средства к скорости, которая как раз обеспечивает еще стабильный режим движения.
В другом предпочтительном варианте скорость уменьшается непрерывно, пока параметр колебательного состояния не упадет ниже заданного предельного значения. Непрерывно означает в этой связи, что рельсовое транспортное средство тормозится к неисчезающим градиентом скорости до неизвестной в начале процесса торможения скорости. Таким образом, можно достичь того, что скорость будет уменьшаться не сильнее, чем это необходимо для стабилизации рельсового транспортного средства. Заданным предельным значением может быть установленное в соответствующей норме и/или эмпирическое значение.
В одном предпочтительном варианте скорость уменьшается, во время уменьшения скорости измеряется параметр колебательного состояния, и скорость уменьшается до тех пор, пока параметр колебательного состояния за счет уменьшения скорости не упадет ниже заданного предельного значения.
Кроме того, предпочтительно, если скорость изменяется до одного или последовательно нескольких дискретных значений и, тем самым, пошагово. Предпочтительным образом изменение скорости происходит до равномерно распределенных в интервале скоростей значений. Значения скорости могут лежать в интервале скоростей 50 км/ч, предпочтительно 10 км/ч. Например, интервал скоростей 210-330 км/ч может иметь дискетные промежуточные значения 300, 270 и 240 км/ч. Этим можно достичь упрощенной реализации способа, в частности упрощенного преобразования этапов способа в программный код.
Может быть желательным вызвать стабилизацию рельсового транспортного средства с минимизацией неизбежно возникающих возмущающих воздействий. Такими возмущающими воздействиями могут быть, в частности, силы на колесной паре, которые возникают импульсным, колебательным или подобным образом. Поэтому предпочтительно, если скорость уменьшается с постоянным замедлением. Таким образом, можно достичь стабилизации тормозных сил, действующих на колесную пару во время торможения. Вследствие этого минимизируется влияние колебаний тормозной силы в качестве возмущающего воздействия на стабилизацию рельсового транспортного средства.
Кроме того, желательно противодействовать повторной смене между стабильным и нестабильным режимами движения рельсового транспортного средства и некритическим и критическим колебательными состояниями колесной пары. Такие смены режимов и состояний могут вызвать пило-, зигзаго- и/или волнообразную характеристику скорости рельсового транспортного средства и с технической и экономической точек зрения нежелательны.
В частности, поэтому предпочтительно, если при многократном возникновении критического колебательного состояния колесной пары скорость продолжительно уменьшается до заданного значения.
Предпочтительным образом скорость уменьшается до заданного значения, если критическое колебательное состояние возникает повторно в пределах интервала скоростей.
Кроме того, оказалось предпочтительным, если скорость уменьшается до заданного значения, если критическое колебательное состояние возникает повторно на одной и той же колесной паре рельсового транспортного средства.
Критические колебательные состояния могут возникать многократно в пределах интервала скоростей и/или на одной и той же колесной паре, в частности, тогда, когда на них, по меньшей мере, преобладающим образом влияет параметр рельсового транспортного средства. Таким параметром может быть износ колеса, колесной пары, тележки и т.п. В частности, возникновению критического колебательного состояния может способствовать состояние износа демпфера тележки, подшипника колеса или колесной пары и т.п.
Предпочтительным образом скорость длительно уменьшается, например, вплоть до ближайшей остановки по расписанию, предпочтительно вплоть до ближайшего обслуживания рельсового транспортного средства. Этим можно избежать обусловленной скоростью перегрузки изношенных компонентов и/или критических для безопасности режимов движения рельсового транспортного средства.
Возможно, чтобы обычные режимы движения рельсового транспортного средства при низких или умеренных скоростях, например прохождение стрелки на скорости 100 км/ч, кратковременно приводили к боковым колебаниям колесной пары. В частности, для того, чтобы избежать вследствие таких режимов движения, в частности, автоматического изменения скорости в соответствии со способом, целесообразно, если скорость выше заданной максимальной скорости изменяется только при возникновении критического колебательного состояния колесной пары. Заданная максимальная скорость может составлять 160-200 км/ч, предпочтительно 200-220 км/ч.
В другом варианте скорость рельсового транспортного средства изменяется с использованием информации системы GPS о текущем положении рельсового транспортного средства. Например, используя информацию системы GPS о текущем положении рельсового транспортного средства, можно определить положение для начала торможения, значение задержки, значение ускорения и т.п. для оптимальной стабилизации рельсового транспортного средства.
Использование текущей информации о месте или положении рельсового транспортного средства, например на основе информации системы GPS, ГЛОНАСС или Galileo, может быть предпочтительным в сочетании с накопленной информацией о положении при возникновении критического колебательного состояния. Кроме того, предпочтительным может быть использование информации о положении в сочетании с накопленной информацией о положении поврежденного, изношенного, в самом широком смысле критического отрезка пути, который может способствовать нестабильности рельсового транспортного средства. Для определения положения рельсового транспортного средства можно использовать также характерный элемент пути движения или установленную на пути движения локационную систему.
Можно также, используя информацию о месте или положении, избежать возникновения критического колебательного состояния или нестабильного режима движения, например за счет своевременного торможения рельсового транспортного средства перед известным критическим отрезком пути и т.п. Благодаря этому рельсовое транспортное средство можно стабилизировать соответствующим характеру отрезка образом.
В другом предпочтительном варианте скорость рельсового транспортного средства изменяется с использованием измерительного сигнала установленного на нем путеизмерительного устройства. Путеизмерительным устройством может быть устройство регистрации с помощью измерительной техники профиля рельсов или ошибки положения пути. Ошибкой положения пути может быть отклонение положения пути в горизонтальном или вертикальном положении от заданного положения. Кроме того, ошибкой положения пути может быть ошибка взаимного положения по высоте двух образующих путь рельсов, которая может возникнуть при возведении или в результате изменений нижнего строения пути.
Измерительный сигнал может использоваться в качестве параметра для определения замедления или ускорения, которое соответствует представленному измерительным сигналом текущему состоянию пути. Измерительный сигнал может использоваться в качестве параметра в регулирующем контуре для изменения скорости. Кроме того, измерительный сигнал может использоваться в качестве параметра в регулирующем контуре для определения управляющего параметра, в частности ускорения или замедления, для стабилизации рельсового транспортного средства. По профилю рельса можно определить, например, отклонение профиля от заданного профиля и/или эквивалентную конусность.
За счет этого можно простым образом достичь улучшенной, согласованной с текущим состоянием пути реакции для стабилизации рельсового транспортного средства при возникновении критического колебательного состояния.
Кроме того, предпочтительно, если демпфирование колебания рельсового транспортного средства изменяется. Демпфированием может быть демпфирование демпфера тележки, демпфера колеса или колесной пары и т.п. При возникновении критического колебательного состояния изменение демпфирования наряду с изменением скорости рельсового транспортного средства может использоваться в качестве дополнительной меры для его стабилизации.
При этом возможно изменить сначала скорость, а затем демпфирование. Кроме того, может быть предпочтительным изменить сначала демпфирование, а затем скорость. Также возможно осуществление обеих мер одновременно.
Кроме того, изобретение направлено на устройство стабилизации рельсового транспортного средства, содержащего колесную пару и приводной блок для ускорения и/или замедления рельсового транспортного средства, с устройством определения параметра колебательного состояния колесной пары.
Устройство содержит, согласно изобретению, блок управления, который предназначен для управления приводным блоком с использованием параметра колебательного состояния колесной пары для изменения скорости рельсового транспортного средства.
Приведенное выше описание предпочтительных вариантов осуществления изобретения содержит признаки, которые в отдельных зависимых пунктах формулы объединены частично по несколько. Однако эти признаки могут быть целесообразно также рассмотрены по отдельности и объединены в целесообразные другие комбинации. В частности, эти признаки могут комбинироваться по отдельности и в любой подходящей комбинации с предложенными способом и устройством в соответствии с независимыми пунктами формулы.
Описанные выше свойства, признаки и преимущества изобретения, а также способ их достижения становятся более ясными и понятными в связи с нижеследующим описанием примеров осуществления, которые более подробно поясняются со ссылкой на чертежи. Примеры осуществления служат для пояснения изобретения и не ограничивают его приведенной в нем комбинацией признаков, также в отношении функциональных признаков. Кроме того, подходящие для этого признаки каждого примера осуществления могут рассматриваться также изолированно, могут быть исключены из примера осуществления, могут быть включены в другой пример осуществления для его дополнения и/или комбинированы с любым из пунктов формулы.
На чертежах представлено следующее:
фиг. 1 – рельсовое транспортное средство с устройством его стабилизации;
фиг. 2 – схематично, регулирующий контур для стабилизации рельсового транспортного средства по фиг. 1;
фиг. 3 – схематично, характеристика скорости рельсового транспортного средства по фиг. 1;
фиг. 4 – схематично, другая характеристика скорости с ее уменьшениями до заданных значений;
фиг. 5 – схематично, другая характеристика скорости с ее заданным ограничением;
фиг. 6 – блок-схема примера осуществления способа.
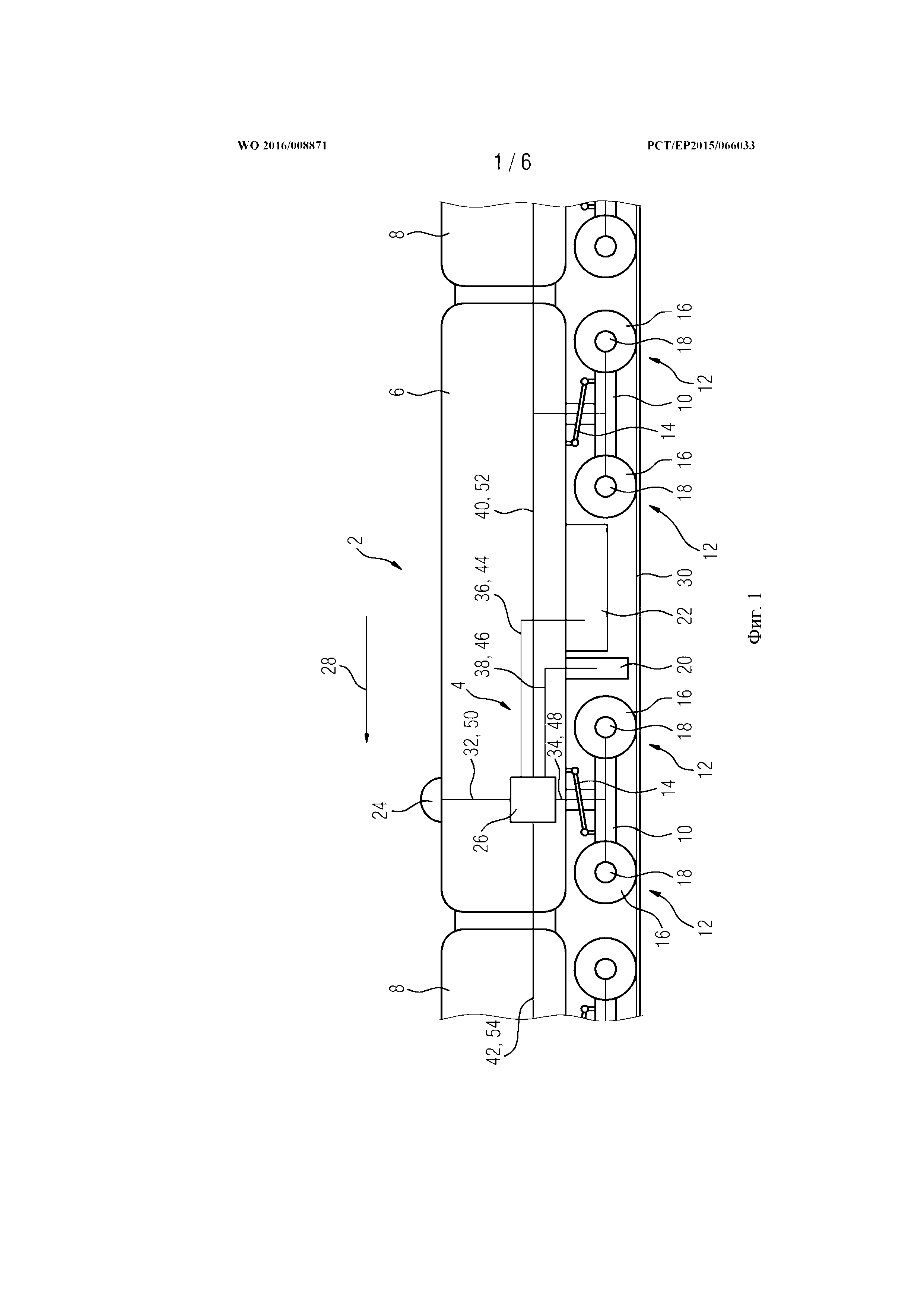
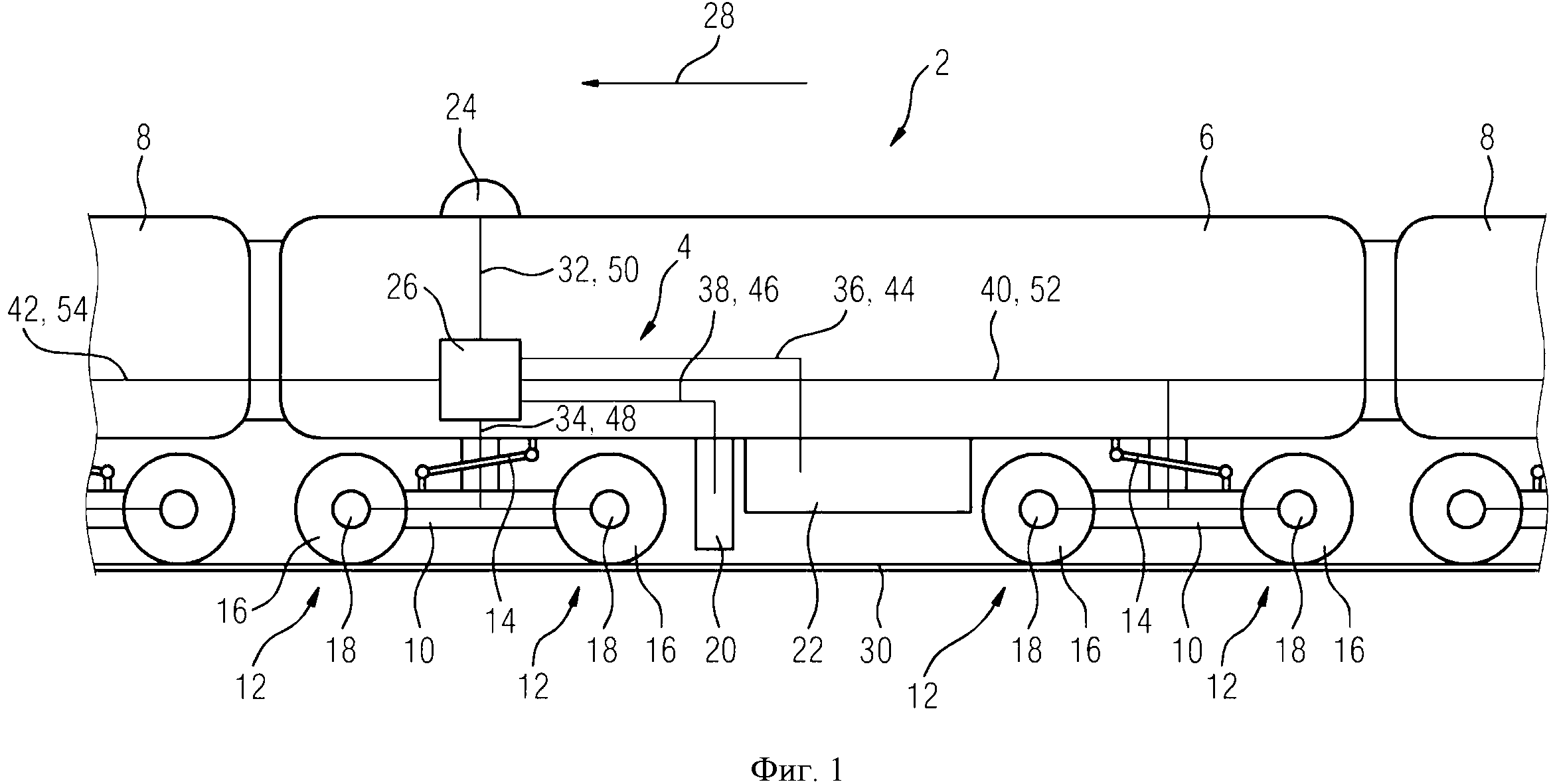
На фиг. 1 представлено рельсовое транспортное средство 2 с устройством 4 его стабилизации. Рельсовое транспортное средство 2 включает в себя в данном примере несколько вагонов 6, 8, из которых для наглядности вагон 6 изображен полностью, а вагон 8 – частично. Возможно также, чтобы рельсовое транспортное средство 2 содержало единственный вагон, который может быть тяговой подвижной единицей и т.п.
Рельсовое транспортное средство 2 содержит две установленные на нижней стороне вагона 6 с возможностью вращения тележки 10 с колесной парой 12 каждая. Каждая тележка 10 соединена с вагоном 6 посредством демпфера 14 для демпфирования вращательного движения. Каждая из колесных пар 12 включает в себя два жестко соединенных между собой посредством оси колеса 16, причем при этом виде сбоку показано соответственно лишь одно колесо.
Устройство 4 стабилизации рельсового транспортного средства 2 включает в себя несколько определяющих устройств 18, путеизмерительное устройство 20 и блок управления 26. Приводной блок 22 и устройство 24 определения положения рельсового транспортного средства 2 могут опционально рассматриваться как составные части устройства 4.
Определяющие устройства 18 расположены в данном примере на тележках 10, точнее, на колесах 16 колесных пар 12 и предназначены каждое для определения параметра колебательного состояния соответствующей колесной пары 12. В данном примере параметром колебательного состояния является поперечное ускорение, которое проходит, в основном, перпендикулярно направлению 28 движения рельсового транспортного средства 2 и, в частности, горизонтально.
Путеизмерительное устройство 20 предназначено для регистрации с помощью измерительной техники ошибки положения пути 30, которая описывает отклонение положения пути 30 в горизонтальном или вертикальном направлении от заданного положения.
Приводной блок 22 предназначен для ускорения и торможения рельсового транспортного средства 2. В отличие от данного примера, рельсовое транспортное средство может содержать также несколько приводных блоков, которые могут быть расположены, например, на тележках или распределены по отдельным вагонам рельсового транспортного средства.
Устройством 24 определения положения является приемный блок для приема сигналов с целью определения с помощью спутника текущего положения рельсового транспортного средства 2.
Блок управления 26 посредством сигнальных соединений 32, 34, 36, 38 соединен с устройствами 24 определения положения, определяющими устройствами 18 передней в направлении 28 движения тележки 10 вагона 6, приводным блоком 22 и путеизмерительным устройством 20. Кроме того, блок управления 26 посредством сигнальных соединений 40, 42 соединен с определяющими устройствами 18 задней в направлении 28 движения тележки 10 и, при необходимости, другими определяющими устройствами, в частности теми, что расположены в других вагонах 8 рельсового транспортного средства 2. Также, возможно, чтобы каждый вагон рельсового транспортного средства, каждая тележка вагона, каждая колесная пара тележки или каждое колесо колесной пары располагало отдельным блоком управления.
Блок управления 26 предназначен для управления приводным блоком 22 с помощью управляющего сигнала 44 через сигнальное соединение 36 для ускорения или замедления рельсового транспортного средства 2 с использованием измерительных сигналов 46, 48 и позиционного сигнала 50 или информации 50 системы GPS. Кроме того, он предназначен для использования измерительных сигналов 52, 54, направляемых через сигнальные соединения 40, 42.
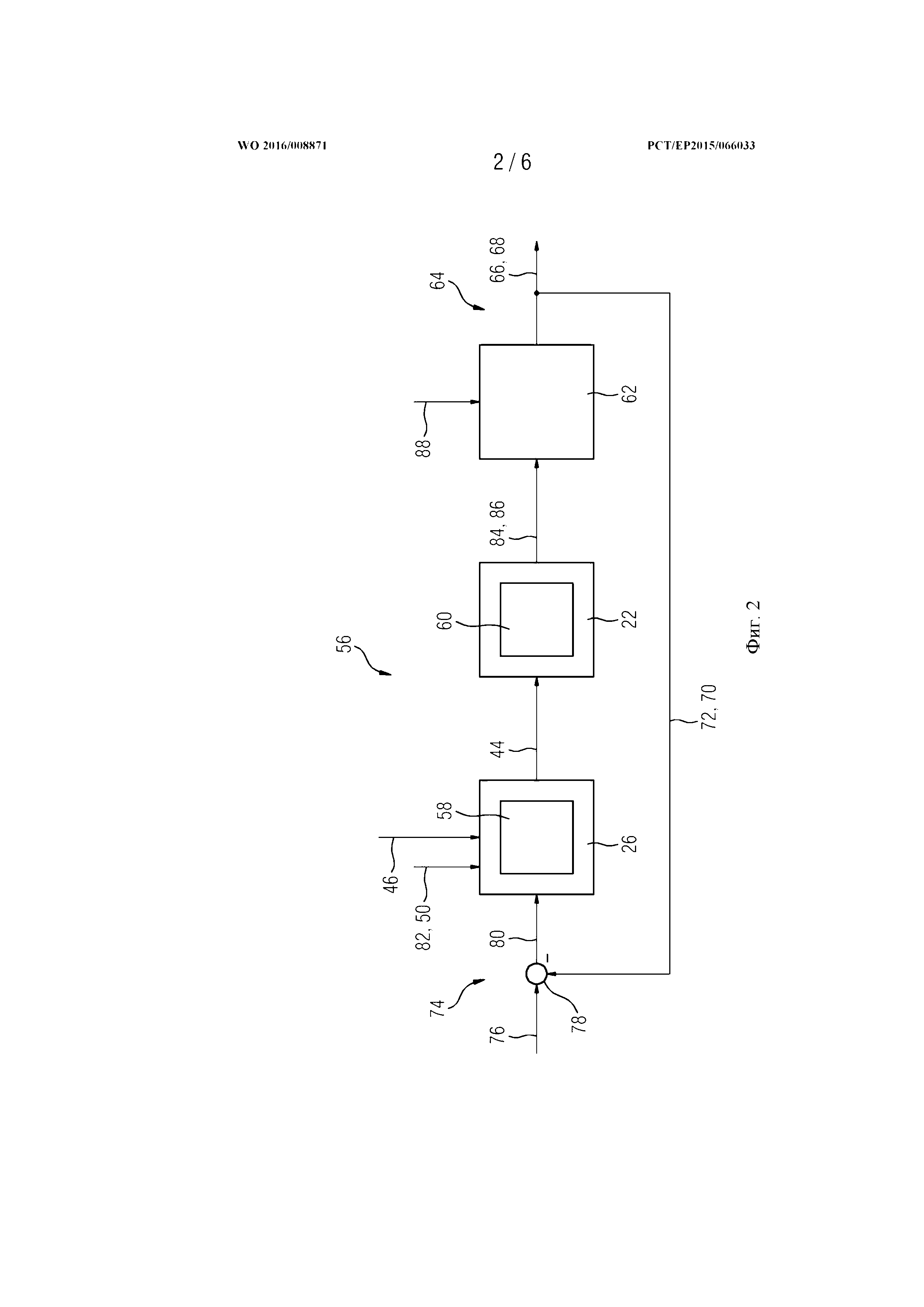
На фиг. 2 схематично представлен контур регулирования 56 для стабилизации рельсового транспортного средства 2 по фиг. 1. Контур регулирования 56 содержит регулятор 58, исполнительный орган 60 и объект регулирования 62.
Регулятор 58 является составной частью описанного в примере на фиг. 1 блока управления 26. Исполнительный орган 60 является составной частью приводного блока 22, а объект регулирования 62 – колебательным состоянием колесной пары 12 рельсового транспортного средства 2. Возможно также описать объект регулирования 62 вообще как режим движения рельсового транспортного средства 2, колебание тележки или колесной пары и т.п.
К выходу 64 контура регулирования 56 приложен параметр 66 колебательного состояния в качестве регулируемого параметра 68, который в данном примере является ускорением колеса 16 рельсового транспортного средства 2 поперек направления 28 движения. Это (боковое) ускорение 66 предпочтительно для регистрации с помощью измерительной техники нестабильности или синусоидального хода рельсового транспортного средства 2.
Регулируемый параметр 68, т.е. ускорение, определяется на выходе 64 контура регулирования 56 и в качестве измеряемого параметра 70 подается через обратную связь 72 к входу 74 контура регулирования 56. Это определение с помощью измерительной техники ускорения или измеряемого параметра 70 происходит посредством определяющего устройства 18 на колесной паре 12 рельсового транспортного средства 2.
Кроме того, к входу 74 контура регулирования 56 приложена направляющая величина, которая в данном примере является заданным предельным значением 76 ускорения колесной пары 12. После образования 78 разности эта разность между измеряемым параметром 70 и предельным значением 76 в качестве рассогласования подается к регулятору 58, т.е. к блоку управления 26. Возможно также, чтобы образование 78 разности происходило посредством функции блока управления 26.
Регулятор 58 или блок управления 26 формирует управляющий сигнал 44 (см. также фиг. 1) с использованием образованного рассогласования 80, т.е. неявно с использованием параметра 66 колебательного состояния или регулируемого параметра 68, и управляет посредством управляющего сигнала 44 исполнительным органом 60 или приводным блоком 22.
В данном примере регулятор 58 использует информацию 82 системы GPS или измерительный сигнал 50 и измерительный сигнал 46 путеизмерительного устройства 20 для формирования управляющего сигнала 44. Исполнительный орган 60 выдает вслед за этим управляющий параметр 84, т.е. приводной блок 22 замедляет или ускоряет рельсовое транспортное средство 2, так что управляющий параметр 84 в виде измеренной скорости 86 воздействует на объект 62 регулирования или на колесную пару 12.
Вследствие изменения скорости 86 объект 62 регулирования изменяет свое состояние, т.е. устанавливается изменившееся отныне колебательное состояние 66 колесной пары 12, которое, в свою очередь, регистрируется с помощью измерительной техники в качестве изменившегося (бокового) ускорения, которое не следует путать с продольным ускорением в направлении 28 движения рельсового транспортного средства 2, и устанавливается его обратная связь.
Кроме того, на объект 62 регулирования или на колесную пару 12 воздействует возмущающий параметр 88. Таковым здесь является сила, действующая на колесную пару 12, точнее, сила торможения или ускорения, выработанная приводным блоком 22 вследствие управляющего сигнала 44.
Описанный процесс регулирования будет проходить непрерывно или квазинепрерывно для большого числа следующих друг за другом моментов времени, пока не произойдет уравнивания между измеряемым параметром 70 и предельным значением 76.
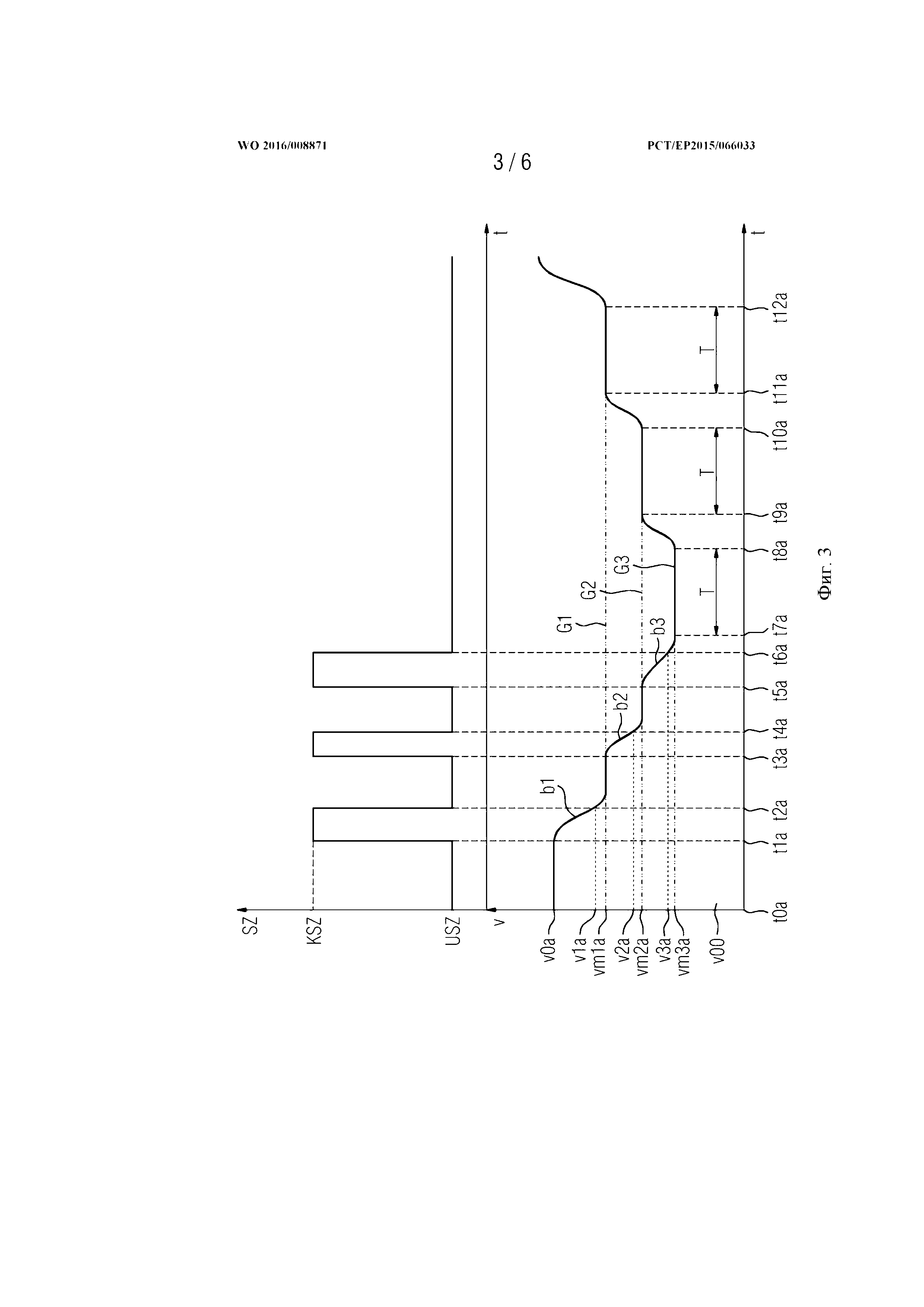
На фиг. 3 схематично изображена характеристика скорости v (84, 86, см. фиг. 2) рельсового транспортного средства 2 по фиг. 1. Кроме того, изображена соответствующая временнáя характеристика колебательного состояния SZ (66, 68, 70, см. фиг. 2). Обе характеристики нанесены в зависимости от времени t, причем обе абсциссы идентичны.
При этом скорость v является скоростью 86 рельсового транспортного средства 2, а колебательное состояние SZ – состоянием параметра 66 колебания или (боковым) ускорением колесной пары 12.
Поскольку здесь для пояснения способа нет необходимости в реалистичном представлении колебательного состояния SZ в зависимости от времени t, а также в целях улучшения наглядного представления характеристика SZ изображена в сильно упрощенном виде. Следовательно, характеристика колебательного состояния SZ отражает лишь смену между двумя дискретными состояниями, а именно критическим KSZ и некритическим USZ колебательными состояниями.
В момент t0a рельсовое транспортное средство 2 (фиг. 1) движется со скоростью v0a, причем имеет место некритическое колебательное состояние USZ рельсового транспортного средства 2 или колесной пары 12.
Те же признаки, которые, однако, могут иметь незначительные отличия, например по величине или числовому значению, размеру, положению и/или функции и т.п., обозначены теми же ссылочными позициями и другими ссылочными обозначениями. Если ссылочные позиции упоминаются одни без ссылочных букв, то имеются в виду соответствующие детали всех примеров.
В момент t1a возникает критическое колебательное состояние KSZ, и скорость v рельсового транспортного средства 2 уменьшается, согласно способу, например, в соответствии с описанным на фиг. 2 процессом регулирования. Скорость v уменьшается до тех пор, пока колебательное состояние SZ не достигнет некритического значения USZ, что происходит в момент t2a при скорости v1a.
Торможение рельсового транспортного средства 2 между t1a и t2a и возникающие при этом силы трения между колесом 16 и путем 30 могут оказать влияние на колебательное состояние SZ. Поэтому может произойти так, что за счет процесса торможения и сопутствующего этому уменьшения скорости v рельсовое транспортное средство 2 стабилизируется, однако после, по меньшей мере, преобладающего уменьшения тормозной силы, т.е. при, по меньшей мере, частичном отпускании тормоза, снова возникнет критическое колебательное состояние KSZ.
Во избежание этого в зависимости от изменившейся таким образом скорости v1a определяется максимальная скорость vm1a при vm1a < v1a и до поры до времени устанавливается в качестве ограничения G1 скорости рельсового транспортного средства 2. В соответствии с этим оно движется вплоть до момента t3a со скоростью vm1.
В момент t3a снова возникает критическое колебательное состояние KSZ, и скорость v рельсового транспортного средства 2 снова уменьшается, пока колебательное состояние SZ не достигнет некритического значения USZ, что происходит в момент t4a при скорости v2a. Снова в зависимости от изменившейся таким образом скорости v2a определяется максимальная скорость vm2a при vm2a < v2a и до поры до времени устанавливается в качестве ограничения G2 скорости рельсового транспортного средства 2. В соответствии с этим оно движется вплоть до момента t5a со скоростью vm2.
В момент t5a еще раз возникает критическое колебательное состояние KSZ, и скорость v рельсового транспортного средства 2 еще раз уменьшается, пока колебательное состояние SZ не достигнет некритического значения USZ, что происходит в момент t6 при скорости v3a. В зависимости от изменившейся таким образом скорости v3a определяется максимальная скорость vm3a при vm3a < v3a и до поры до времени устанавливается в качестве ограничения G3 скорости рельсового транспортного средства 2.
В соответствии с этим рельсовое транспортное средство 2 движется с момента t7a до заданного момента времени со скоростью vm3a. Если в зависимости от участка пути или расписания потребуется меньшая скорость v, то она может быть соответственно уменьшена, или рельсовое транспортное средство остановлено.
В момент t8a скорость v снова повышается, поскольку рельсовое транспортное средство 2 в заданной области Т движения двигалось в пределах некритического диапазона USZ колебательного состояния.
Это значит, что в момент t8a установленное в момент t6a ограничение G3 скорости устраняется или гасится, и рельсовое транспортное средство 2 ускоряется. Оно ускоряется вплоть до установленного в момент t4a и еще действующего ограничения G2 скорости и достигает его в момент t9a.
В момент t10a скорость v снова повышается, поскольку рельсовое транспортное средство 2 в другой заданной области Т движения двигалось с некритическим колебательным состоянием USZ. В этот момент t10a установленное в момент t4a ограничение G2 скорости устраняется, и рельсовое транспортное средство 2 ускоряется. Оно ускоряется вплоть до установленного в момент t2a и еще действующего ограничения G1 скорости и достигает его в момент t11a.
После дальнейшего стабильного прохождения области Т движения между моментами t11a и t12a устраняется также последнее ограничение G1 скорости, и рельсовое транспортное средство 2 ускоряется.
В данном примере заданной областью Т движения является продолжительность движения между двумя моментами. Однако возможно также, чтобы областью движения был участок движения между двумя точками участка.
Далее желательно осуществлять стабилизацию рельсового транспортного средства 2 с минимизацией неизбежно возникающих возмущающих параметров (88, см. фиг. 2). Такими возмущающими параметрами могут быть, в частности, силы на колесной паре 12, которые возникают импульсным, колебательным или подобным образом.
Поэтому скорость v уменьшается с замедлением b1, b2, b3, в основном, постоянным между моментами t1a и t2a, t3a и t4a, t5a и t6a. Таким образом, можно достичь стабилизации действующих на колесную пару 12 во время торможения тормозных сил, так что минимизируется влияние колебаний тормозной силы в качестве возмущающего воздействия 88 на стабилизацию рельсового транспортного средства 2 или объект 62 регулирования.
Возможно также, чтобы обычные режимы движения рельсового транспортного средства 2 с низкими или умеренными скоростями v, например прохождение стрелки, кратковременно приводили к критическому колебательному состоянию KSZ.
Во избежание того, чтобы вследствие таких режимов движения не произошло изменения скорости в соответствии со способом, скорость изменяется только при возникновении критического колебательного состояния KSZ выше заданной максимальной скорости v00.
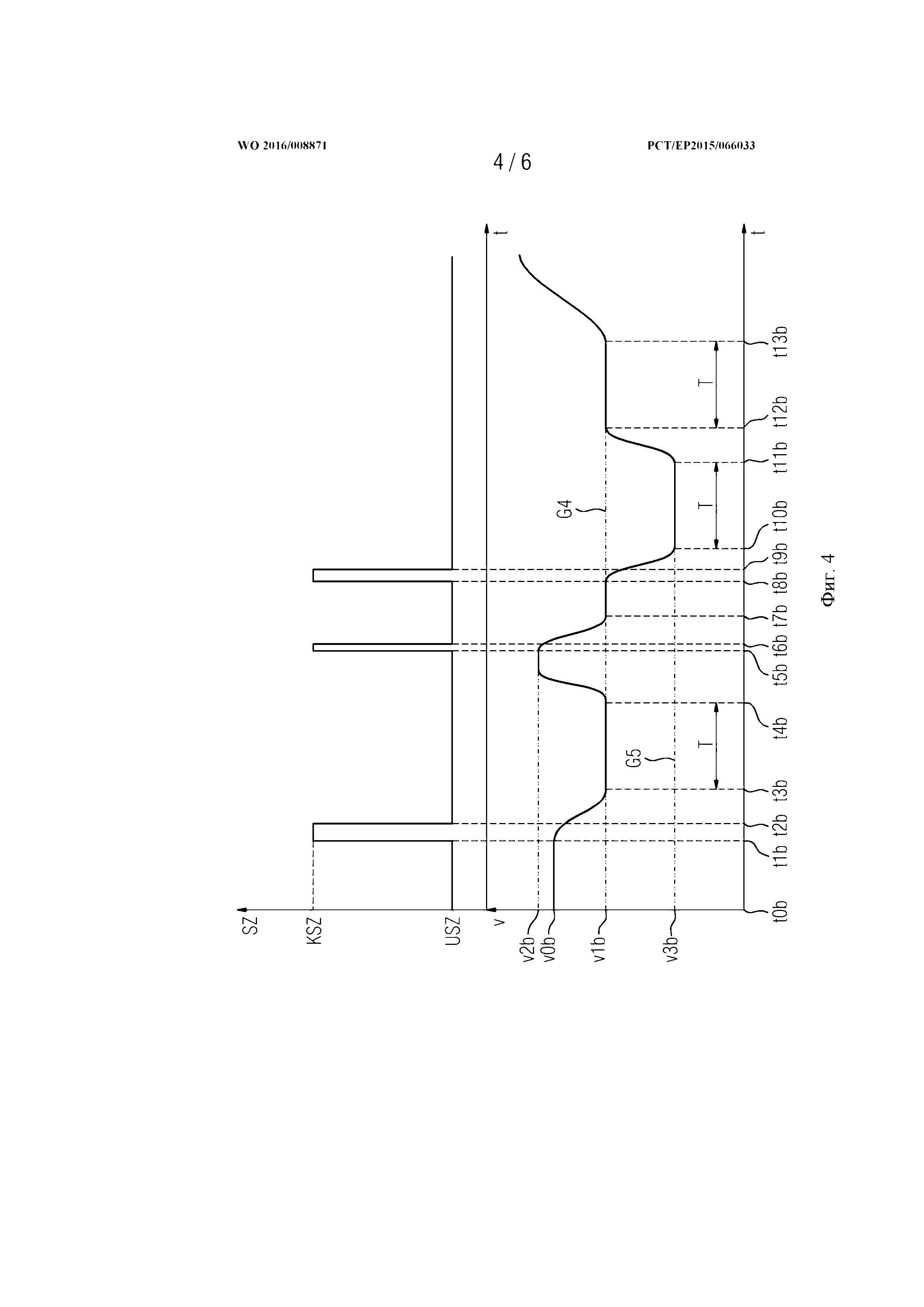
На фиг. 4 схематично изображены в зависимости от времени t другая характеристика скорости v и соответствующая ей характеристика колебательного состояния SZ, причем обе абсциссы также идентичны. Нижеследующее описание ограничено, в основном, отличиями от предыдущих примеров, на которые в отношении одинаковых признаков и функций дана ссылка.
В отличие от примера на фиг. 3, уменьшение скорости происходит здесь до заданных дискретных значений, благодаря чему может быть достигнута упрощенная реализация способа, в частности упрощенное преобразование этапов способа в программный код. К упрощенной иллюстрации временнóй характеристики колебательного состояния SZ относятся пояснения к фиг. 3.
В момент t0b рельсовое транспортное средство 2 (см. фиг. 1) движется со скоростью v0b, причем имеет место некритическое колебательное состояние колесной пары 12 или стабильное движение рельсового транспортного средства 2.
В момент t1b возникает критическое колебательное состояние KSZ, и скорость v рельсового транспортного средства 2 уменьшается. Скорость v уменьшается до заданного значения v1b, которое до заданного момента времени используется в качестве заданного ограничения G4 скорости, достигаемого в момент t3b. При этом в момент t2b при t2b < t3b уже достигается некритическое колебательное состояние USZ.
В момент t4b скорость v снова повышается, и ограничение G4 скорости устраняется, поскольку рельсовое транспортное средство 2 в заданной области Т движения двигалось в пределах некритического диапазона USZ колебательного состояния. Скорость v повышается до значения v2b при v2b > v0b, причем для установления v2b решающим является внешнее, т.е. не обусловленное способом, обстоятельство.
В момент t5b снова возникает критическое колебательное состояние KSZ, и скорость v рельсового транспортного средства 2 снова уменьшается. Скорость v еще раз уменьшается в момент t7b до заданного значения v1b, которое, в свою очередь, используется в качестве ограничения G4 скорости. При этом уже в момент t6b при t6b < t7b достигается некритическое колебательное состояние USZ.
В момент t8b снова возникает критическое колебательное состояние KSZ, и скорость v рельсового транспортного средства 2 снова уменьшается. Скорость v уменьшается в момент t10b до заданного значения v3b, которое используется в качестве ограничения G5 скорости. При этом уже в момент t9b при t9b < t10b достигается некритическое колебательное состояние USZ.
Вслед за этим после прохождения области Т движения скорость повышается в момент t11b до v1b за счет устранения ограничения G5 скорости.
После дальнейшего прохождения другой области Т движения между моментами t12b и t13b устраняется также еще оставшееся ограничение G4 скорости, и рельсовое транспортное средство 2 ускоряется.
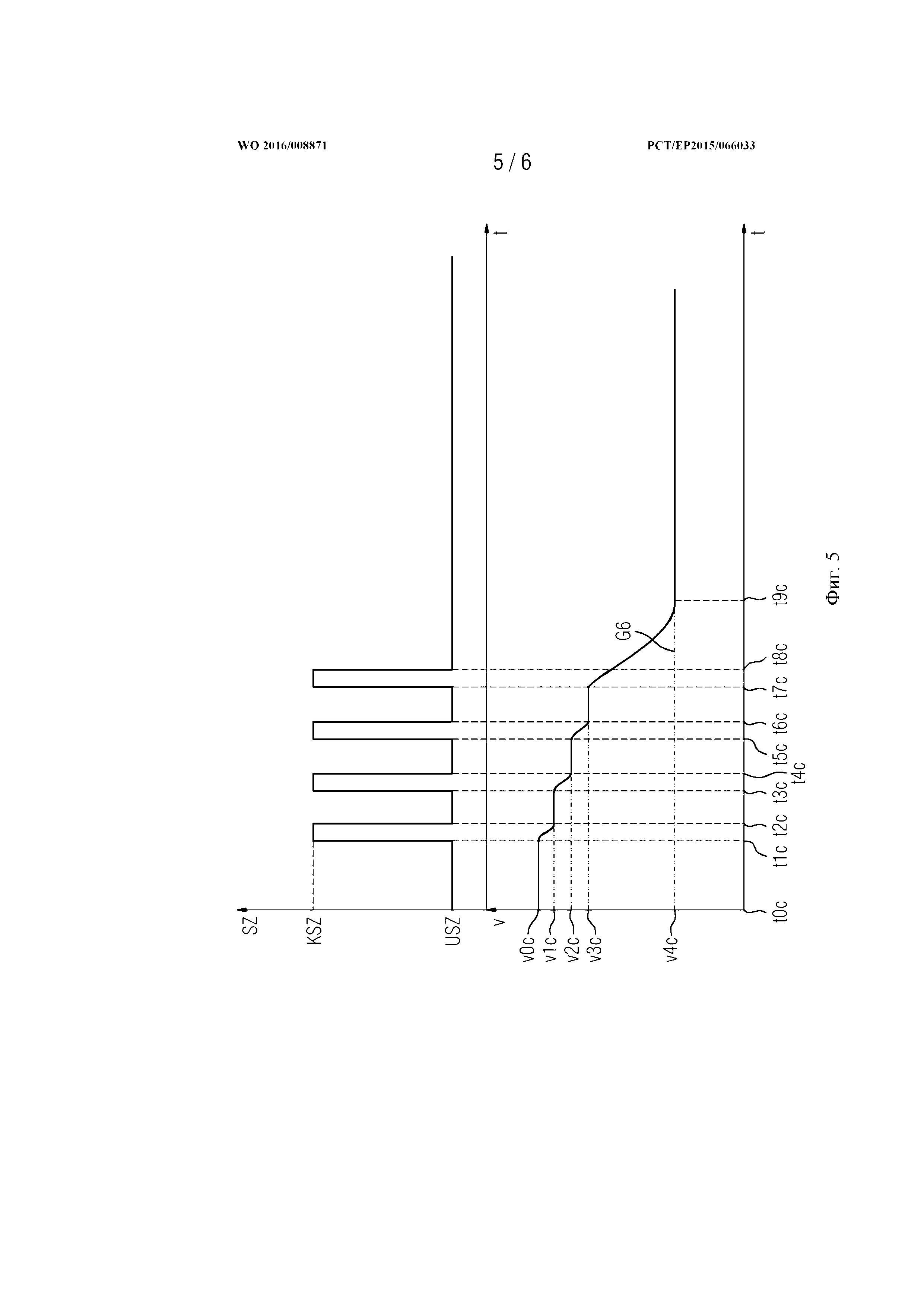
На фиг. 5 схематично изображены другая характеристика скорости v и соответствующая ей характеристика колебательного состояния SZ.
В отличие от примеров на фиг. 3 и 4, здесь после многократного возникновения критического колебательного состояния KSZ происходит постоянное ограничение скорости до заданного, заметно уменьшенного значения. Этим можно избежать обусловленной скоростью перегрузки изношенных компонентов рельсового транспортного средства 2 и/или критических для безопасности режимов движения.
Исходя из скорости v0c, при возникновении критических колебательных состояний KSZ в моменты t1c, t3c и t5c скорость последовательно уменьшается до значений v1c, v2c и v3c, достигаемых в моменты t2c, t4c и t6c.
В момент t7c снова возникает нестабильность или критическое колебательное состояние KSZ. Вследствие многократно возникающей нестабильности рельсового транспортного средства 2 скорость v уменьшается до заданного, заметно уменьшенного значения v4c, причем рельсовое транспортное средство 2 уже в момент t8c выходит из возникшего в момент t7c критического колебательного состояния KSZ.
Достигнутое таким образом в момент t9c значение v4c скорости устанавливается в качестве ограничения G6 скорости, и рельсовое транспортное средство 2 эксплуатируется до заданного момента времени с этой максимальной скоростью.
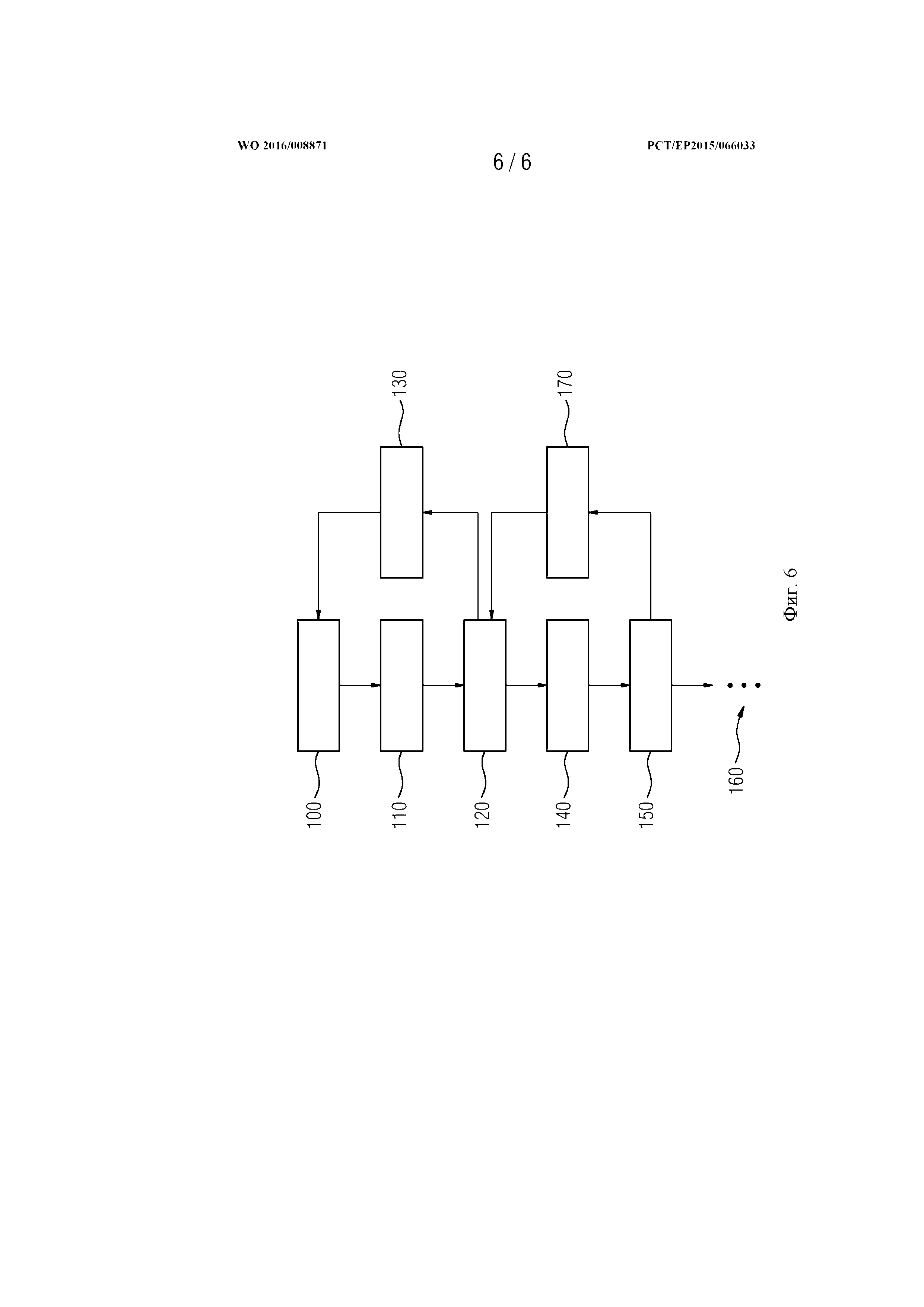
На фиг. 6 изображена блок-схема способа. Сначала рельсовое транспортное средство 2 движется со скоростью v (см. фиг. 3, v0a) в стабильном режиме (см. фиг. 3, USZ). Следовательно, на этом этапе 100 способа не установлено никакого ограничения скорости, или оно неактивно.
При возникновении критического состояния KSZ скорости колесной пары 12 скорость v0a с использованием параметра 66 колебательного состояния, точнее, ускорения, т.е. регулируемого параметра 68, на этапе 110 изменяется. Скорость уменьшается, пока параметр 66 колебательного состояния не достигнет заданного предельного значения (см. фиг. 2, поз. 76).
На следующем этапе определяется максимальная скорость (например, vm1a), отличающаяся от измененной таким образом скорости, которая может составлять, например, v1a (фиг. 3), и на этапе 120 устанавливается в качестве ограничения (G1, фиг. 3). Рельсовое транспортное средство 2 эксплуатируется до поры до времени со скоростью, которая не превышает это ограничение.
Если рельсовое транспортное средство 2 для заданной области движения Т (см., например, фиг. 3) двигалось в пределах некритического диапазона колебательного состояния колесной пары 12, то выявленное до этого и установленное на этапе 120 ограничение скорости на этапе 130 устраняется, и скорость рельсового транспортного средства 2, при необходимости, повышается.
Если снова возникает нестабильность, прежде чем будет пройдена заданная область движения, то на этапе 140 скорость снова уменьшается. На этапе 150 определяется и устанавливается дальнейшее.
Этапы способа «изменение скорости» и «установление ограничения скорости» повторяются, если перед прохождением заданных областей движения возникают дальнейшие нестабильности. Это повторяется до тех пор, пока, например, не будет установлено максимальное число ограничений скорости, не будет достигнута заданная минимальная скорость и т.п. Продолжение способа на этапе 160 обозначено пунктиром.
Если рельсовое транспортное средство 2, исходя из установления на этапе 150 ограничения скорости для заданной области движения, двигалось в пределах некритического диапазона колебательного состояния, то на этапе 170 выявленное последним и установленное на этапе 150 ограничение скорости устраняется или гасится. Однако выявленное и установленное на этапе 120 ограничение скорости остается активированным.
Если рельсовое транспортное средство 2 снова проходит заданную область движения без возникновения нестабильностей, то на этапе 130 устраняется также это ограничение скорости. Тогда все ограничения скорости в соответствии со способом неактивные, и рельсовое транспортное средство снова возвращается в состояние на этапе 100.
Переходной элемент герметизированного корпуса
Модуль подшипника с сенсорным устройством
Привод хвостового винта вертолета
Способ запирания выпрямителя переменного тока с распределенными накопителями энергии
Устройство для монтажа элемента теплозащитного экрана
Способ для определения момента времени загрузки для загрузки расплавляемого материала в электродуговую печь, устройство обработки сигналов, машиночитаемый программный код, носитель для хранения данных и электродуговая печь
Сенсорное устройство для тока подшипника с преобразователем энергии
Способ восстановления лопатки турбины, снабженной по меньшей мере одной платформой
Система валогенератора
Система элементов теплозащитного экрана и способ монтажа элемента теплозащитного экрана

