Результат интеллектуальной деятельности: СПОСОБ ГИДРОЛОКАЦИИ В МЕЛКОВОДНЫХ ОБЛАСТЯХ С ОПЕРАТИВНЫМ КОНТРОЛЕМ ИЗМЕНЧИВОСТИ УСЛОВИЙ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ
Вид РИД
Изобретение
Изобретение относится к области гидролокации и может быть использовано при проведении подводных работ, контроле подводной обстановки и при охране различных объектов со стороны водной среды в изменчивых условиях работы гидролокационной системы, характерных, например, для мелководных прибрежных областей. В таких областях, с глубинами менее 5-10 м, при продольном волновом зондировании водной толщи наблюдается ряд факторов, вызывающих потери энергии распространяющихся в воде акустических сигналов. Это расширение фронта волны, пространственное затухание энергии акустических сигналов при распространении как в водной среде так и при многочисленных отражениях и рассеянии сигналов от дна и от волнующейся водной поверхности, а также рефракция звуковых лучей при распространении по неоднородно прогретому водному слою [1] и, кроме того, значительный фон естественных помех от ветра, дождя и волнения. В результате из-за суммарного влияния указанных факторов максимальная дальность обнаружения подводных целей, например, пловцов-нарушителей, в таких условиях может меняться значительно во времени: в зависимости от времени года, дня и ночи до нескольких часов, оказываясь практически не предсказуемой.
Для использовании описанного в патенте РФ №19160, опубл. 10.08.2001, комплексного стенда возникающая на практике необходимость экспериментального определения дальности обнаружения подводных объектов гидроакустическими средствами эвентуального наблюдателя в предпоходном планировании решается заданием известных среднестатистических экспериментальных данных для заданного времени года и района плавания, что возможно благодаря относительно стабильным условиям распространения звука в глубоководных областях акваторий. Однако это недостижимо для мелководных областей с их изменчивым характером условий обнаружения подводных целей.
Известен способ обнаружения вторжения подводного объекта в контролируемую область натурного водоема, подразумевающий прием провзаимодействовавшего с подводной целью акустического сигнала после его отражения от отражателей, расположенных вдоль эллиптической поверхности для формирования диаграммы направленности зондирующих сигналов специальной формы и достижения повышения соотношения сигнал/шум в принимаемом сигнале (патент РФ №2150123, опубл. 27.05.2000). К основным недостаткам данного способа, принятого за прототип, можно отнести очень сложную в технической реализации систему расположения устройств (приемника, излучателя и отражателей) в среде, жестко располагаемых в фокусах эллиптической поверхности области непрерывного акустического пятна, подверженную влиянию переменчивости условий среды (погодные условия, течения, волнение водной поверхности и пр.). В условиях мелководных областей это приведет к постоянной необходимости изменения геометрической системы расположения устройств и, соответственно, к смещению «фокусировки» отраженных сигналов, не поступающих на приемники, и таким образом создающих разряженную зону в области непрерывного акустического пятна, способствующую скрытному пересечению объектом контролируемой области.
Можно предположить, что для получения необходимой информации по распространению звука в условиях мелководных областей достаточно выполнить расчеты потерь, исходя из параметров и свойств мелководной среды, в которой распространяется звук, однако эти расчеты громоздки и сложны, как это следует из различных руководств, и, кроме того, требуют знания исходных параметров среды с учетом их изменений в оперативном режиме, например, знаний вертикального распределения скорости звука в водном слое и характера волнения, а также типа грунта и рельефа дна. При этом неизбежны значительные неточности и ошибки и, главное, теряется оперативность получения результата.
Технической проблемой, решение которой обеспечивается при осуществлении заявленного изобретения, является организация в процессе работы гидролокационной системы получения оперативной информации о влиянии потерь энергии гидроакустических сигналов и их изменчивости, а также фона помех на эффективность обнаружения подводных целей для возможной компенсации нежелательных последствий данных факторов посредством осуществления на практике в оперативном порядке необходимых мероприятий.
Такими мероприятиями могут быть увеличение или уменьшение уровня излучаемого зондирующего сигнала или изменение его частоты, выбор ширины диаграммы направленности излучаемого или принимаемого отраженного зондирующего сигнала и т.д., вплоть до перехода к известным способам гидролокации, обладающим преимуществами по дальности обнаружения целей, например, способу параметрической гидролокации, при котором дальность увеличивается за счет создания узкого сектора низкочастотного излучения зондирующих сигналов, когда снижаются потери энергии звука, или способам вынесенного приема, описанным в патентах РФ №№2358289, 2383899, 2461844, при которых отраженные от объекта зондирующие сигналы регистрируются приемником или приемниками, вынесенными в зону облучения ближе к цели, где уровни регистрируемых сигналов существенно более высокие по сравнению с их приемом на приемник, совмещенный с излучателем гидролокатора.
Техническим результатом заявленного изобретения является достижение постоянной максимально возможной дальности обнаружения подводных целей, а также помехоустойчивости в работе гидролокационной системы за счет оперативной оценки общих потерь энергии гидроакустических сигналов в контролируемой (зондируемой) мелководной области.
Для достижения заявленного технического результата предложен способ гидролокации в мелководных областях с оперативным контролем изменчивости условий обнаружения подводной цели, заключающийся в продольном волновом зондировании излучателем водной толщи и приеме отраженного от подводной цели зондирующего сигнала, в котором одновременно с обнаружением подводной цели дополнительно осуществляют прием отраженного от рассеивающего объекта зондирующего сигнала в по меньшей мере двух точках, расположенных на разном расстоянии от рассеивающего объекта, определяют степень затухания энергии отраженного от рассеивающего объекта зондирующего сигнала с использованием данных об отношении интенсивностей зондирующего сигнала, принятого в упомянутых по меньшей мере двух точках, и по результатам сравнения полученного значения энергии с пороговым принимают решение о компенсации негативного влияния присутствующих помех, вызванных изменчивостью условий обнаружения подводной цели, при этом рассеивающий объект располагают в зондируемой области.
В частных случаях реализации предложенного способа для продольного волнового зондирования используют излучатель зондирующего сигнала, совмещенный с его приемником, а прием отраженного от рассеивающего объекта зондирующего сигнала осуществляют на по меньшей мере два приемника, вынесенных в зондируемую область между излучателем и рассеивающим объектом. Прием отраженного от рассеивающего объекта зондирующего сигнала также могут осуществлять на подвижный приемник. Рассеивающим объектом может быть специально введенный в гидролокационную систему стационарный имитатор подводной цели (желательно наполненный воздухом сферический объект), а также сама подводная цель. В предложенном способе в знаменателе отношения интенсивностей зондирующего сигнала могут использовать интенсивность сигнала в наиболее близкой к рассеивающему объекту точке приема.
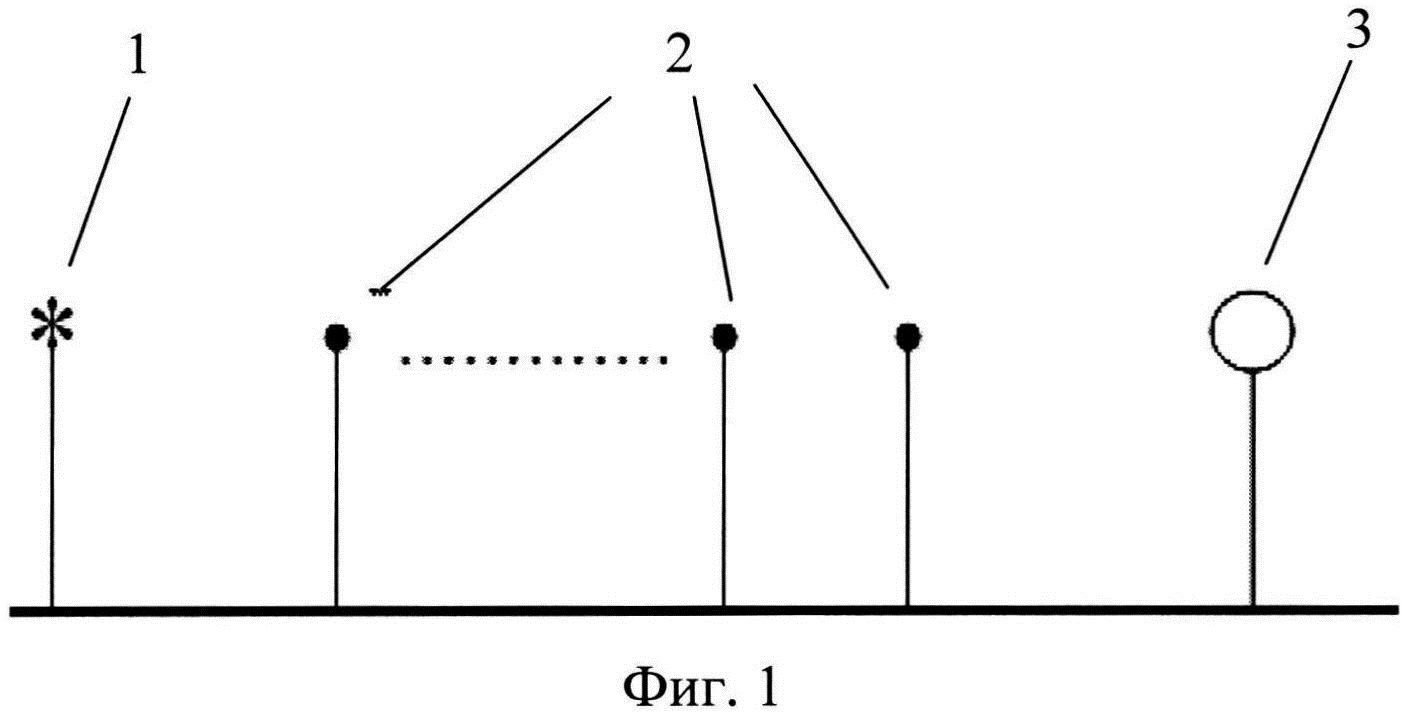
Структурная схема частного случая реализации заявленного способа показана на фиг. 1, где 1 - излучатель зондирующих сигналов, совмещенный с приемником; 2 - приемники, вынесенные в зону облучения; 3 - рассеивающий объект, находящийся в зондируемой зоне.
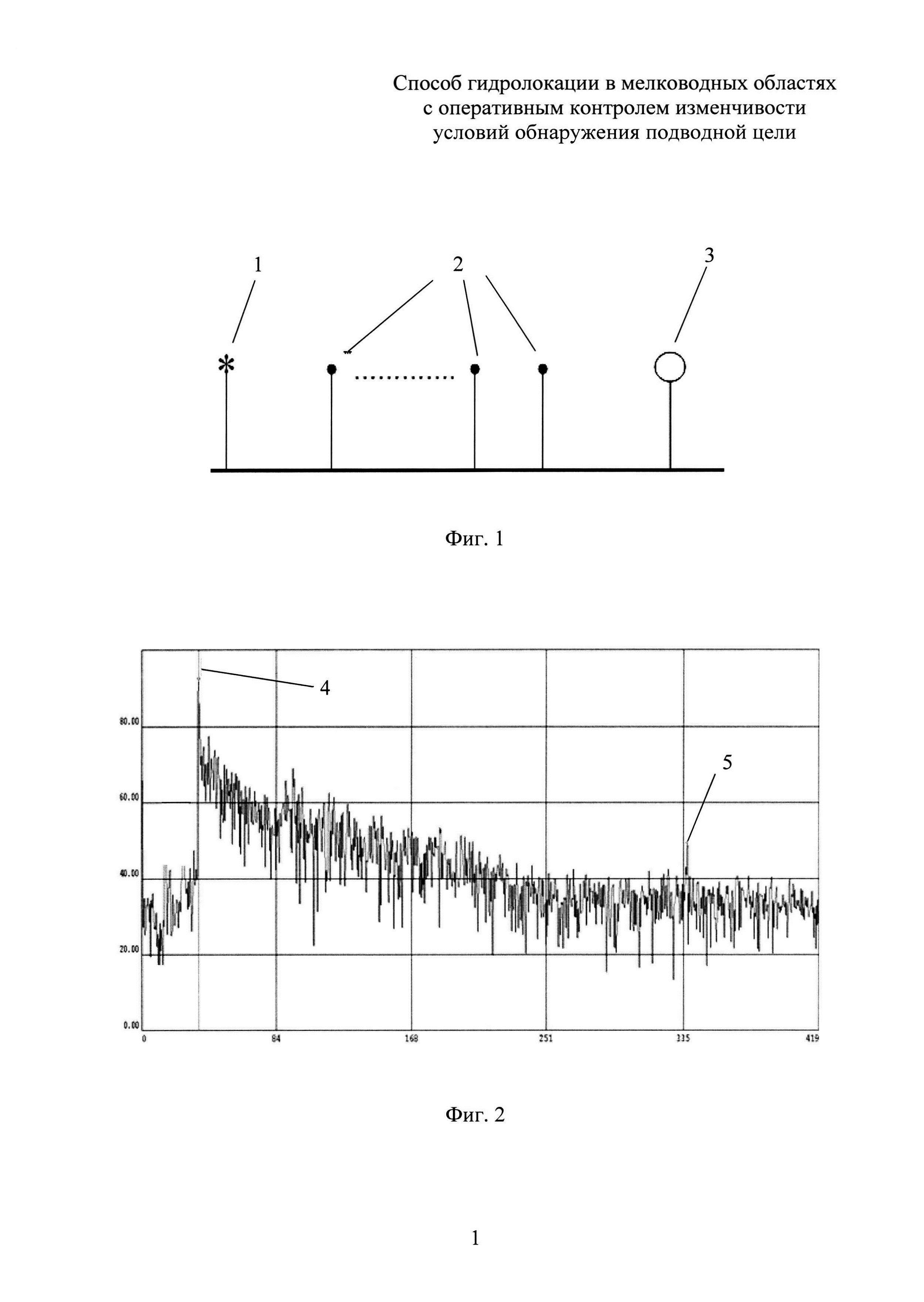
На фиг. 2 представлена осциллограмма регистрации излучаемого и отраженного от рассеивающего объекта зондирующего сигнала, где 4 - излучаемый зондирующий сигнал; 5 - отраженный от рассеивающего объекта зондирующий сигнал на фоне помех. По горизонтальной оси на фиг. 2 отложено отсчитываемое от излучателя расстояние, а по вертикали - уровень принимаемого зондирующего сигнала.
Потеря энергии (степень ее затухания) отраженного от рассеивающего объекта зондирующего сигнала при его прохождении в водном слое расстояния r от рассеивающего объекта к приемнику может быть оценена путем определения коэффициента затухания энергии β в дБ/км данного сигнала. Известно выражение для интенсивности принимаемого сигнала, учитывающее, кроме зависимости интенсивности от пространственного затухания волны, также расширение фронта волны при ее удалении от рассеивающего объекта:
I~r-2 10-0,1βr.
Обозначим приемники 2 (фиг. 1) между рассеивающим объектом и излучателем зондирующих сигналов как П1, П2, …, Пn, тогда расстояние r от рассеивающего объекта до каждого из приемником будет соответственно r1, r2, …rn.
Зондирующий сигнал от излучателя достигает рассеивающего объекта и, отразившись от него, приобретает некоторую интенсивность I. Этот отраженный и рассеянный объектом сигнал должен совершить еще обратный путь к n приемникам (n больше или равно 1), где его интенсивность уменьшается соответственно до I1, I2, …, In в результате расхождения фронта волны, потерь энергии из-за поглощения в воде и многократных отражений от дна и водной поверхности.
Для отношений I2/I1, …In/I1, определяющих снижение уровня отраженного от рассеивающего объекта зондирующего сигнала при прохождении расстояний r1, r2, …rn до одного или нескольких приемников, предложены выражения:
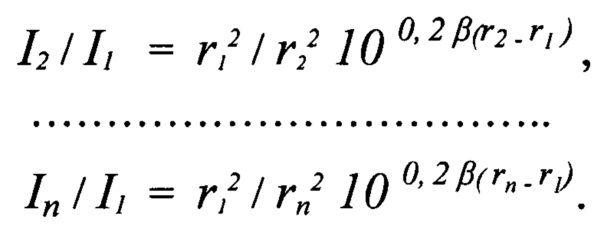
При этом в формировании отношений могут быть использованы любые другие их комбинации из имеющегося набора.
В полученных таким образом уравнениях значения интенсивности зондирующего сигнала I измеряются в точках приема единовременно или с заданной периодичностью, расстояния r1, r2, …rn заданы или легко могут быть измерены. Величина β может быть определена путем решения одного указанного уравнения или, например, путем получения усредненного значения при решении нескольких уравнений.
Возможны различные варианты практического выполнения и использования заявленного способа, например помещение в контролируемую зону излучателя, рассеивающего объекта и совокупности приемников, для проведения относительно длительных наблюдений регистрируемых приемниками отраженных от рассеивающего объекта зондирующих сигналов и их возможной изменчивости, вызываемой различными факторами, например волнением или сезонными изменениями условий распространения звука в водном слое. Другой вариант практической реализации заявленного способа предназначен для проведения оперативных замеров и может содержать ограниченное число приемников, вплоть до одного, местоположение которых между излучателем и рассеивающим объектом определяют в процессе проведения замеров.
Предложенный способ был опробован в реальных условиях озера Бисерово Московской области с глубинами 2-3 м, где наблюдались характерные для мелководных областей негативные факторы и потребовалось проведение необходимых мероприятий по увеличению дальности обнаружения подводных целей. На фиг. 2 представлен результат регистрации отраженного от рассеивающего объекта зондирующего сигнала одним из приемников 2 в эксперименте, вынесенным на 30 м от излучателя 1 по направлению излучения. То есть расстояние от данного приемника 2 до рассеивающего объекта 3 составило 300 м. Расстояние от излучателя 1 до рассеивающего объекта 3 равнялось 330 м. В эксперименте второй приемник был совмещен с излучателем 1.
На фиг. 2 видно, что до излучения зондирующего сигнала регистрируется естественный шум акватории, а затем выделяется излученный зондирующий сигнал 4 и реверберационные помехи как отклик на зондирующий сигнал 4 со стороны водной среды в виде отражений от дна и водной поверхности. Затем на этом фоне на приемник 2 приходит зондирующий сигнал 5, отраженный от рассеивающего объекта 1. Уровень естественного шума акватории до прихода на вынесенный приемник 2 излученного зондирующего сигнала 5 весьма слабый, судя по левой части рисунка, а фоном, на котором обнаруживается полезный сигнал от рассеивающего объекта 1, являются реверберационные помехи в виде многочисленных отражений зондирующего сигнала от дна и водной поверхности. Поэтому отмеченный на фиг. 2 отраженный от рассеивающего объекта зондирующий сигнал 5, хотя и обнаруживается на одном приемнике 2, вынесенном ближе к рассеивающему объекту 1, но оказывается сильно зашумленным. Результатом же предложенного способа является учет поглощения энергии как непосредственно в водной среде, так и в результате многочисленных отражений сигнала от дна и водной поверхности, определяющих снижение уровня отраженных от рассеивающего объекта сигналов при прохождении расстояний от рассеивающей цели до приемников.
Используя же результаты регистрации в по меньшей мере двух точках интенсивности отраженного от рассеивающего объекта зондирующего сигнала 5, получим при подстановке их в одно или несколько упомянутых уравнений искомую величину потерь энергии гидроакустических сигналов в зондируемой мелководной области. Для упомянутого эксперимента оценка значения коэффициента β на частотах в области 100 кГц, проводимая в течение 3 дней, по совокупности полученных в результате проведения измерений оказалась порядка 140 дБ/км. При сравнении данной величины с пороговой потребовалось изменение типа генерируемого зондирующего сигнала и его длительности. Повторное проведение эксперимента с измененными характеристиками зондирующего сигнала показало существенное увеличение его интенсивности в точках приема (почти в два раза), обеспечивающее наибольшую дальность обнаружения для текущих условий эксперимента. Увеличение интенсивности сигнала способствовало более четкому его выделению на уровне регистрируемых помех, что подтверждает общее повышение помехоустойчивости гидролокационной системы.
Источники информации
1. Акустика океана / Под ред. Л.М. Бреховских. М.: Наука, 1974. 695 с.
Бронезащита
Датчик углового положения
Устройство охлаждения активного элемента твердотельного лазера
Лазерный детонатор
Устройство для определения аэродинамических нагрузок, действующих на оперение модели
Несущая рама излучателя твердотельного лазера с диодной накачкой
Способ лазерной сварки соединения труба - трубная доска
Кольцевая щелевая антенна
Способ получения информации о входном оптическом сигнале, основанный на преобразовании моделированных оптических сигналов с помощью гетеродинного фотоприемного устройства, и устройство для его реализации
Способ определения динамического коэффициента внешнего трения
Пассивный метод и система обнаружения движущихся в воде объектов
Приемник низкочастотных колебаний давления в водной среде
Способ и система компенсации маскирующего влияния реверберационных помех на обнаружение подводных целей при гидролокации
Способ и система автоматически управляемой активной охраны объектов со стороны водной среды
Способ регистрации локальных колебаний давления при пассивной локации движущихся в воде целей с компенсацией помех от поверхностного волнения
Метод и система обнаружения целей при гидролокации
Способ и система обнаружения объектов при гидролокации
Система многоразового оповещения о волнах цунами в глубоком океане

