Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА КОМПЕНСАЦИИ МАСКИРУЮЩЕГО ВЛИЯНИЯ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ НА ОБНАРУЖЕНИЕ ПОДВОДНЫХ ЦЕЛЕЙ ПРИ ГИДРОЛОКАЦИИ
Вид РИД
Изобретение
Изобретение относится к области гидролокации и предназначено для обнаружения подводных целей в морских областях, озерах, в речных руслах и каналах.
Предложенный способ и система обнаружения целей при гидролокации могут быть использованы для обнаружения подводных целей при организации контроля подводной обстановки и охраны береговых объектов со стороны мелководной среды или охраны подводных сооружений, находящихся в мелководных областях, таких как проложенные под водой кабели, коллекторы, трубопроводы, а также охраны судов на якорной стоянке, морских нефтяных платформ, входов в порты, опор мостов, каналов, акваторий гидро- и атомных станций, пирсов, верфей, гаваней от возможных нарушителей и террористов.
В настоящее время гидролокация находит широкое применение для систем охраны объектов со стороны водной среды, когда отраженные от подводных целей зондирующие сигналы гидролокатора регистрируются приемниками, размещенными в акватории. При этом условием уверенного обнаружения подводных целей и определения их местоположения является значительное превышение регистрируемых приемниками отраженных от целей зондирующих сигналов над уровнем помех. Однако в реальных условиях помеховой обстановки, особенно характерной для мелководных прибрежных областей, типичной является ситуация, когда отраженные от цели сигналы оказываются слабо различимыми на фоне многочисленных отражений зондирующих сигналов от дна и водной поверхности, представляющих реверберационную помеху.
Известен способ и система обнаружения объектов при гидролокации (Патент РФ №2358289), в котором для увеличения регистрируемого приемниками отраженного от целей сигнала над уровнем помех регистрацию сигналов ведут на приемники, пространственно вынесенные от излучателя гидролокатора ближе к цели.
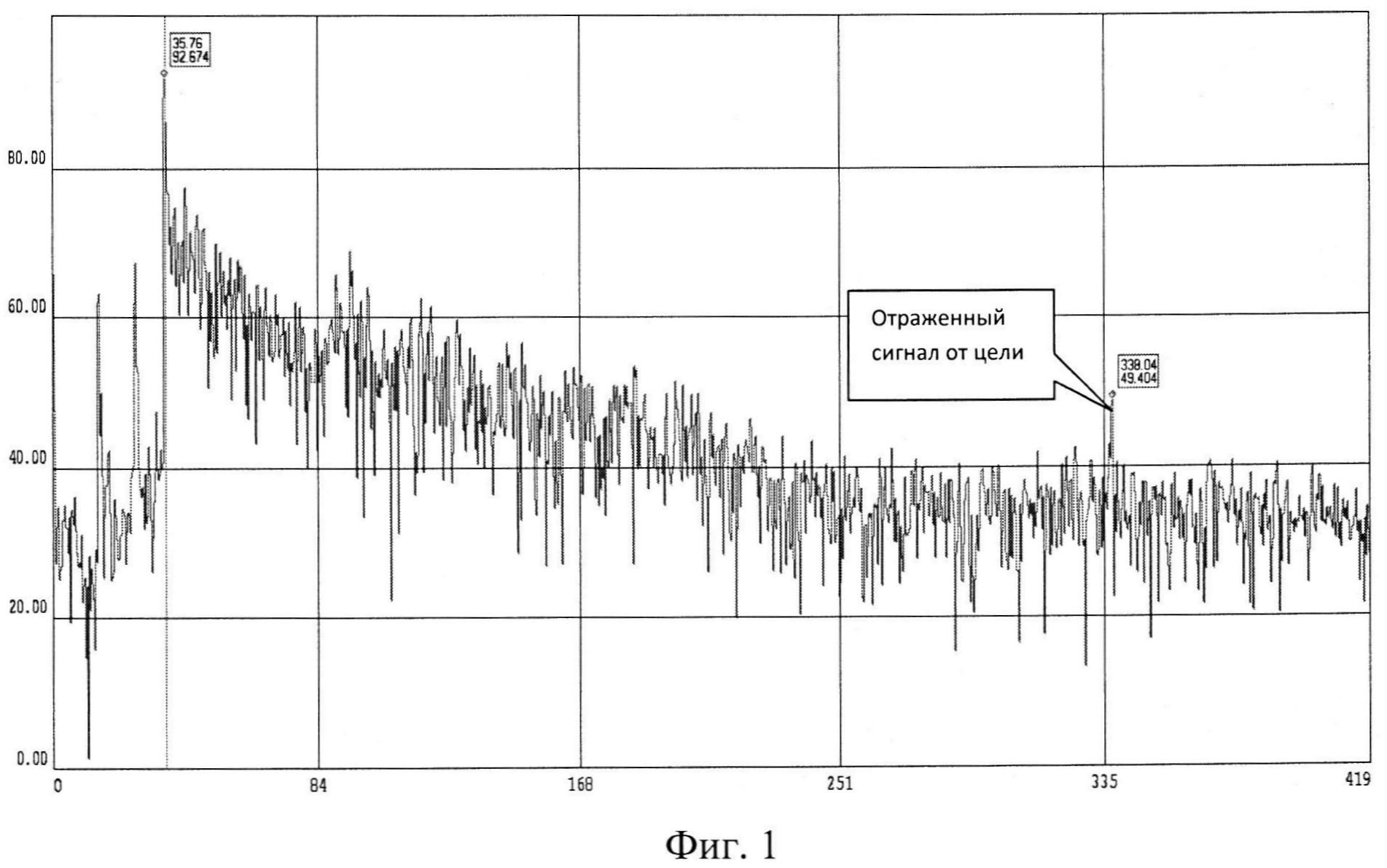
Однако указанный известный способ вынесенного приема, хотя и дает некоторое увеличение уровня полезного сигнала над фоном помех, не является достаточно эффективным для слабо отражающих подводных целей или значительно удаленных от места приема полезного сигнала. Это видно на представленном на фиг.1 результате регистрации вынесенным приемником сигналов после излучения гидролокатором зондирующего сигнала в реальных условиях мелководной акватории. Здесь приемник сигналов вынесен от излучателя на 30 м по направлению излучения ближе к цели, так что с момента излучения до прихода на вынесенный приемник прямого излученного сигнала регистрируется естественный шум акватории, а затем регистрируется прямой зондирующий сигнал и реверберационные сигналы как отклик на зондирующий сигнал со стороны озвученной водной среды в виде отражений от дна и водной поверхности и от неподвижных предметов в зоне облучения. По горизонтальной оси на фиг.1 отложено отсчитываемое от излучателя расстояние, с которого приходят сигналы на вынесенный приемник, а по вертикали - уровень принимаемых сигналов.
Видно, что уровень естественного шума акватории до прихода на вынесенный приемник прямого излученного сигнала весьма слабый, судя по левой части рисунка, а фоном, на котором как раз должен обнаруживаться полезный сигнал от цели, являются реверберационные сигналы в виде многочисленных интенсивных отражений зондирующих сигналов от дна, водной поверхности и неподвижных предметов в водном слое. Поэтому отмеченный на рисунке отраженный сигнал от цели, находящейся на расстоянии 338 м от излучателя, хотя и обнаруживается за счет вынесения приемника ближе к цели, но оказывается сильно зашумленным.
Очевидно, как это видно на фиг.1, что в условиях мелководья реверберационная помеха оказывает маскирующее действие на обнаружение не только дальних целей, но и близких, поскольку ее уровень растет с уменьшением расстояния от излучателя, что затрудняет выделение отраженных зондирующих сигналов от целей в широком диапазоне расстояний до целей, приводит к их потерям из-за помех.
Задача, на решение которой направлено предложенное изобретение, заключается в способе и системе компенсации маскирующего влияния реверберационных помех на обнаружение подводных целей при гидролокации при наблюдении оператором на экране монитора гидролокатора регистрируемых отраженных от цели зондирующих сигналов в условиях помех с простой реализацией и расширенной областью применения, позволяющих в значительной степени компенсировать маскирующее влияние реверберационных помех на обнаружение подводных целей в реальных условиях, характерных для мелководных акваторий. При этом особое внимание обращается на обнаружение движущихся целей, поскольку на практике именно движущиеся цели, такие как пловцы-террористы или подводные технические средства движения, представляют первоочередную угрозу для охраняемых объектов со стороны водной среды.
Предлагаемое решение задачи достигается за счет того, что озвучивание мелководной акватории посылками зондирующих сигналов в секторе облучения сопровождают непрерывной регистрацией на экране монитора отклика среды на посылки с образованием на экране монитора практически постоянного фона реверберационных помех в координатах проходимое звуковым лучом расстояние - время в форме развертки по строкам типа телевизионной, синхронизированной с моментами посылки зондирующего сигнала. При этом появление отраженных сигналов от подводных целей, наложенных на такой постоянный фон, должно достаточно четко проявляться визуально, особенно если цель движется и отраженные от нее сигналы накладываются на такой относительно постоянный фон.
Также предложена система компенсации маскирующего влияния реверберационных помех на обнаружение подводных целей при гидролокации на основе способа, которая содержит необходимый для осуществления способа набор взаимосвязанных элементов: излучатель зондирующих сигналов гидролокатора, соединенный с электронным блоком формирования зондирующих сигналов, и приемники гидролокатора как совмещенный, так и пространственно вынесенные от излучателя, регистрирующие отраженные от подводных целей зондирующие сигналы и отклик среды на посылки, соединенные с электронным блоком приема сигналов и электронным блоком их обработки и преобразования в форму развертки по строкам типа телевизионной, синхронизированной с моментами посылки зондирующих сигналов, для образования на экране монитора фона реверберационных помех с наложенными на фон отраженными от подводных целей зондирующими сигналами в координатах проходимое звуковым лучом расстояние - время.
В основе предлагаемого способа компенсации маскирующего влияния реверберационного фона помех лежит визуальное обнаружение отраженных от подводных целей зондирующих сигналов на фоне помех как деталей, выделяющихся на поле экрана, заполненном относительно постоянным фоном реверберационных помех. Более того, отраженным зондирующим сигналам от движущихся целей будет соответствовать появление наклонных линий, наложенных на фон реверберационных помех. При этом даже кратковременные прерывания этих линий, которые могут быть вызваны временной остановкой целей, ослаблением уровня отраженного от них зондирующего сигнала или возрастанием уровня помех, не должны вызывать потерь обнаруженных целей, поскольку возникающие перерывы в наблюдаемых линиях могут быть восстановлены за счет их экстраполяции по оставшимся фрагментам.
Каждый из признаков, включенных в формулу изобретения, необходим, а все вместе они достаточны для достижения поставленной цели, то есть в формулу изобретения включены существенные признаки.
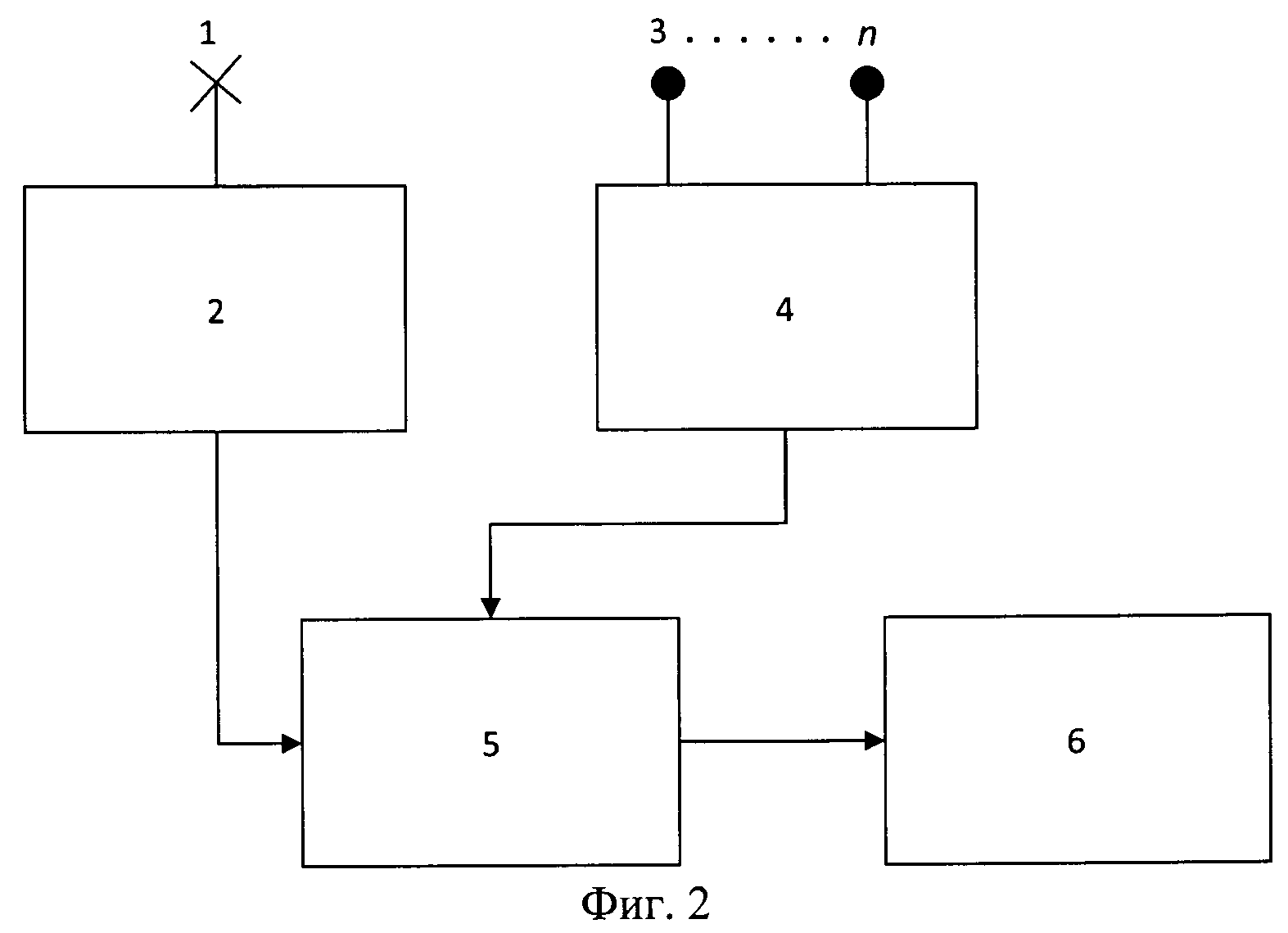
Предложенные способ и система осуществляются в соответствии со структурной схемой гидролокации целей, приведенной на фиг.2, которая включает следующие взаимосвязанные элементы:
1 - излучатель зондирующих сигналов гидролокатора;
2 - электронный блок формирования зондирующих сигналов;
3,....n - приемники гидролокатора, регистрирующие поступающие на них прямые зондирующие сигналы (для вынесенных приемников), отклик среды на зондирующие сигналы и отражения зондирующих сигналов от подводных целей;
4 - электронный блок приема сигналов, регистрируемых приемниками гидролокатора;
5 - электронный блок обработки сигналов, регистрируемых приемниками гидролокатора, поступающих с выхода блока 4, путем преобразования их в форму развертки по строкам типа телевизионной, синхронизированной с моментами посылки зондирующего сигнала, для образования фона реверберационных помех в координатах расстояние - время с наложенными на фон отраженными зондирующими сигналами от целей;
6 - монитор, на экране которого происходит непрерывное представление текущих данных, регистрируемых приемниками гидролокатора, в форме строчной развертки после их обработки в блоке 5.
В соответствие с этой схемой в зоне наблюдений в воде устанавливают излучатель 1 зондирующих сигналов, формируемых блоком 2, и приемники 3,…n регистрируемых сигналов как совмещенный с излучателем (не показан на фиг.2), так и пространственно вынесенные от излучателя. В приемном блоке 4 осуществляется прием регистрируемых приемниками сигналов и преобразование их в блоке 5 в форму строчной развертки на экране монитора 6, синхронизированной с моментами посылки зондирующего сигнала. В результате такого преобразования на экране монитора 6 будет формироваться относительно постоянный фон реверберационных помех с наложенными на фон отраженными сигналам от подводных целей.
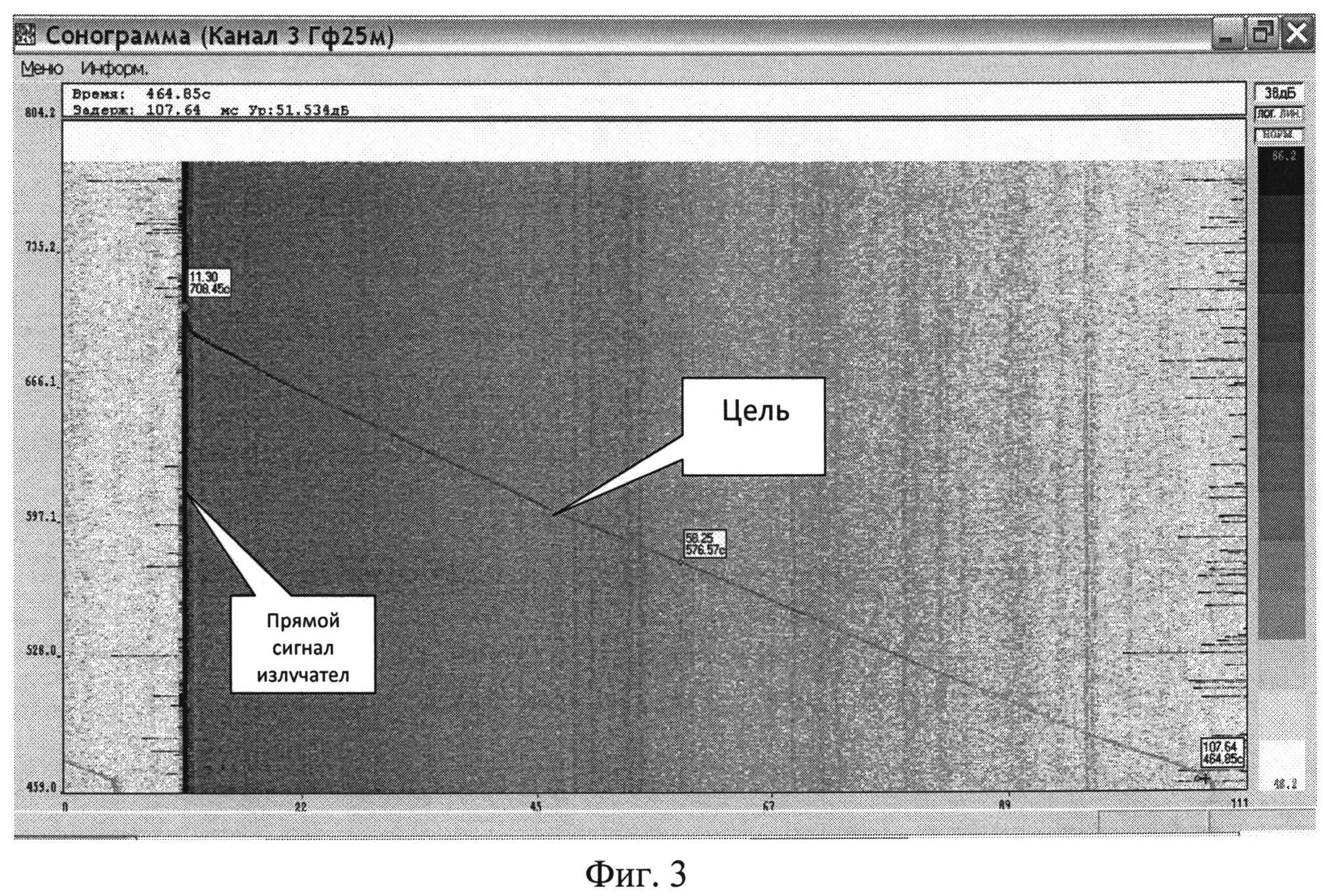
Пример экспериментально наблюдаемого результата обнаружения движущейся подводной цели по предложенному способу и системе на его основе представлен на фиг.3, который получен для аналогичных условий, что и рассмотренный выше на фиг.1 результат наблюдения отклика среды при однократной посылке зондирующего сигнала, когда отраженный сигнал от цели оказывался сильно зашумленным. Совместное же представление на фиг.3 отклика среды при многократных посылках зондирующего сигнала в виде строчной развертки поля помех с наложенными на него полезными отраженными сигналами от цели позволяет визуально обнаружить движущуюся цель, которая четко проявляется в виде наклонной линии на фоне помех в координатах расстояние - время, где по шкале ординат отложено время в секундах, а по шкале абсцисс - текущее расстояние в метрах.
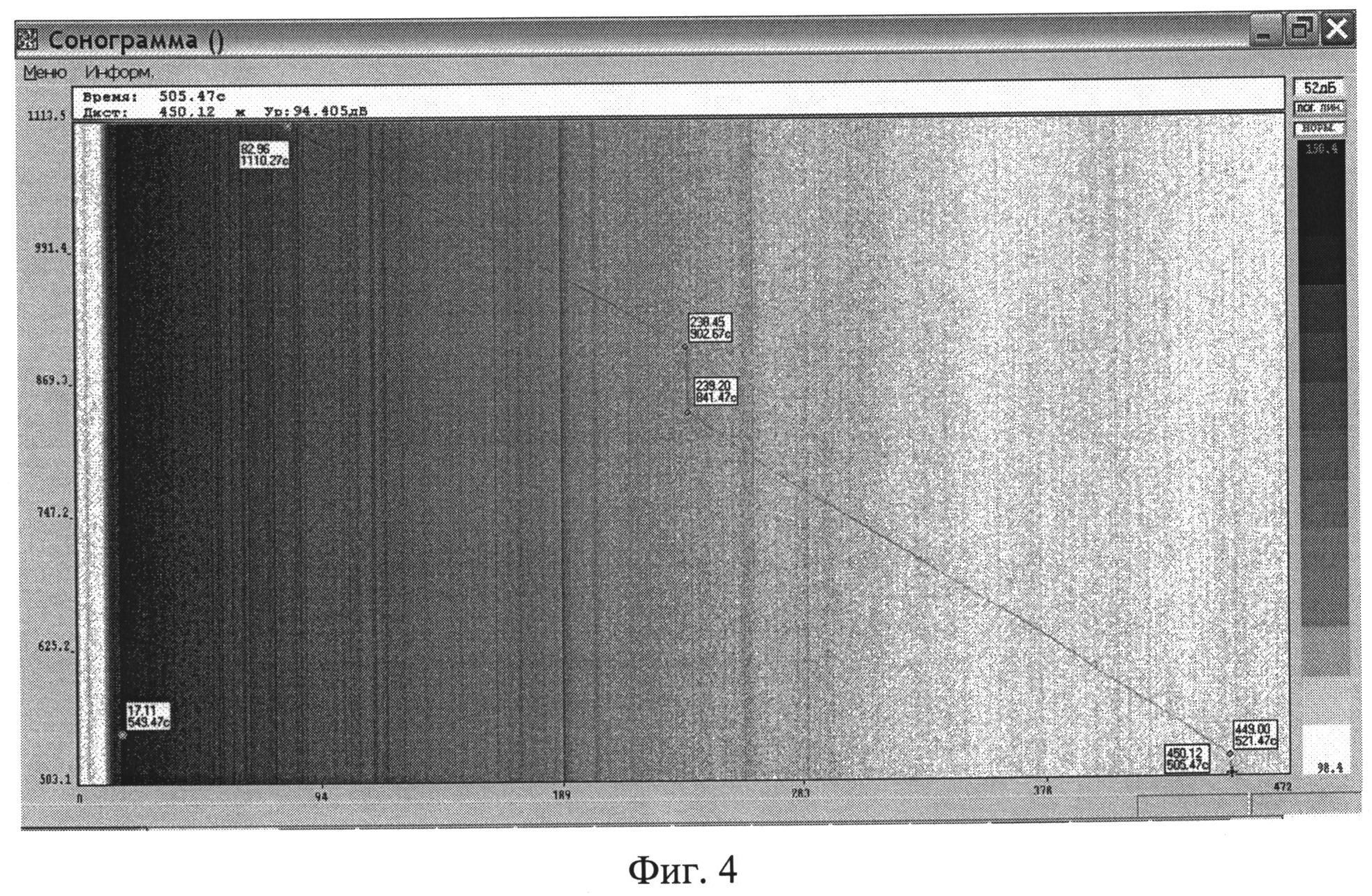
Необходимо отметить, что только движущаяся цель, удаляющаяся или приближающаяся относительно обнаруженного ее приемника, четко прослеживается на реверберационном фоне в виде наклонной линии. Если же такое движение у цели отсутствует, например, если цель останавливается, то ситуация по ее обнаружению резко меняется - отраженные от цели зондирующие сигналы практически сливаются с фоном помех от неподвижных подводных предметов и становятся слабо различимыми на этом фоне. Такая ситуация иллюстрируется на фиг.4. Однако, как видно из фиг.4, оставшиеся фрагменты наблюдаемой линии позволяют восстановить факт обнаружения цели и ее остановки.
Положительный эффект, получаемый при использовании предложенного способа компенсации маскирующего влияния реверберационного фона помех на обнаружение целей при гидролокации, можно сформулировать как возможность обнаружения подводных целей и, кроме того, определения их параметров в сложных помеховых условиях реальных акваторий, поскольку наблюдаемая на экране монитора линия, обусловленная движущейся целью, является источником информации о местоположении обнаруженной цели и о параметрах ее перемещений. Так, наблюдаемое регистрируемое время прихода сигнала от цели будет соответствовать расстоянию до цели, а угол наклона наблюдаемой линии или ее фрагментов на экране монитора напрямую соответствует скорости и направлению перемещения цели - ее удалению или приближению относительно обнаружившего ее приемника в наблюдаемый момент времени.
Предложенный способ и система позволяют также наблюдать на общем фоне реверберационных помех сразу несколько целей в секторе облучения и определять их параметры, такие как направления и скорости перемещения вплоть до остановки и изменения параметров движения во времени, а также контролировать прохождение зондирующих сигналов в облучаемую зону, регистрируемых вынесенными от излучателя приемниками.
Осуществление рассмотренного предложенного способа и системы достаточно просто в изготовлении и мало по стоимости, поскольку предполагает лишь новый подход к обработке и представлению получаемой гидролокатором стандартной исходной информации путем организации непрерывной регистрации на экране монитора отклика среды на посылки с образованием на экране фона реверберационных помех в координатах расстояние - время в виде строчной развертки изображения по полю экрана, синхронизированной с моментами посылки зондирующего сигнала, что не требует применения сложных и дорогостоящих дополнительных технических устройств.
Техническим результатом настоящего изобретения является снижение маскирующего влияния реверберационных помех на обнаружение подводных целей при гидролокации, наблюдение сразу нескольких целей в секторе облучения и определение параметров их перемещения в сложных помеховых условиях мелководных акваторий, а также контроль прохождения зондирующих сигналов в облучаемую зону.
Пассивный метод и система обнаружения движущихся в воде объектов
Приемник низкочастотных колебаний давления в водной среде
Способ и система автоматически управляемой активной охраны объектов со стороны водной среды
Способ регистрации локальных колебаний давления при пассивной локации движущихся в воде целей с компенсацией помех от поверхностного волнения
Пассивный метод и система обнаружения движущихся в воде объектов
Контактный датчик
Приемник низкочастотных колебаний давления в водной среде
Способ определения структуры молекулярных кристаллов
Способ и система автоматически управляемой активной охраны объектов со стороны водной среды
Способ регистрации локальных колебаний давления при пассивной локации движущихся в воде целей с компенсацией помех от поверхностного волнения
Способ гидролокации в мелководных областях с оперативным контролем изменчивости условий обнаружения подводной цели
Метод и система обнаружения целей при гидролокации
Способ и система обнаружения объектов при гидролокации
Система многоразового оповещения о волнах цунами в глубоком океане

