Результат интеллектуальной деятельности: Способ передвижения по вертикали подводного аппарата за счет солнечной энергии, использующий управление его плавучестью
Вид РИД
Изобретение
Изобретение относится к технике подводных исследований в океанологии, океанографии, гидрофизики, гидрохимии и в технике использования водных ресурсов, а также синоптике. Оно может быть использовано при создании и разработке гидрологических, синоптических и океанологических исследовательских и мониторинговых подводных аппаратов - глайдеров, автоматических сканирующих роботов - зондов и автоматических гидрологических буев и станций, а также в технике спасения под водой.
Известен способ управления плавучестью подводного аппарата [1] (подводные лодки) заключающийся в изменении его водоизмещения путем принятия или откачивания жидкости в балластную емкость (подводные аппараты), предварительно заполненную газом под давлением на рабочем горизонте. Однако, способ не пригоден для значительных вертикальных перемещений, что потребовало бы больших энергозатрат. Что является серьезным недостатком и ограничивает применимость известного решения.
Известен способ [2] перемещения аппарата по глубине заключающийся в изменение плавучести за счет маневрового балласта при изменении объема температурно-зависимого рабочего тела при нагревании (охлаждении) его средой - морской водой. Существенным недостатком данного решения является зависимость от термодинамических параметров внешней среды, определяющей температуру рабочего тела. А так же недостатком упомянутого решения является зависимость от теплопроводности конструкции, обеспечивающей теплообмен с внешней среды, т.к. оно рассчитано на энергопитание за счет теплового потока в процессе теплообмена через конструкцию аппарата.
Наиболее близким к предлагаемому является решение [3]: способ вертикального движения подводного аппарата, заключающийся в изменении его водоизмещения путем воздействия на управляемую геометрию конструкции водоизмещающего объема аппарата, работой давления упругого парогаза низкокипящей жидкости, помещенной между подвижными частями водоизмещающей конструкции подводного аппарата, в следствии теплообмена низкокипящей жидкости с окружающей средой за счет теплопроводности конструкции аппарата, и нагревания ее у поверхности моря, которое приводит к уменьшению водоизмещения, а в нижней точке траектории, тот же механизм теплообмена, приводит к охлаждению и конденсации парогаза, следовательно, падению его давления, что, в результате, приводит к обратному изменению водоизмещающей геометрии и увеличению водоизмещения аппарата, которое производят за счет работы энергии деформации запасаемой, при нагревании в верхних и слоях траектории, в виде потенциальной энергии давления газового аккумулятора.
Известный способ является инерционным, так как зависим от температуры водной среды и свойств фазового перехода рабочего тела - низкокипящей жидкости, что практически ограничивает область применения известного способа экваториальными акваториями Мирового Океана и теплым временем года. Кроме того, скорость теплообмена рабочего тела напрямую зависят от температурных градиентов в процессе теплообмена его с морской водой, чья температура также зависит от теплопроводности конструкции, что, безусловно, влияет на эффективность энергообмена. Предлагаемое решение имеет целью избавиться от указанных недостатков, связанных с инерционностью процессов теплопередачи, обусловленных не большими температурными градиентами с морской водой, а так же необходимостью интенсифицировать процесс испарения рабочего тела путем повышения его температуры за счет активной теплопередачи непосредственно от солнечного излучения - нагревателя другого природного источника. Это позволяет увеличить скорость процесса испарения рабочего тела и повысить давление парогаза, которое используют для изменения объема.
В отличие от известного способа предложенный заключается в использовании активного нагрева низкокипящей жидкости омическим теплом. С этой целью в жидкость подают тепловую энергию посредством электронагревателя, размещенного внутри низкокипящей жидкости, помещенной между водоизмещающими подвижными частями подводного аппарата, и нагревают ее в верхней точке траектории, когда аппарат на поверхности моря, от солнечных батарей, расположенных на внешней поверхности подводного аппарата, обращенных к солнцу и, воспринимая его излучение, вырабатывают электрический ток, который подают на нагреватель внутри низкокипящей жидкости, последняя, испаряясь, создает парогаз, чье давление действует на поверхности подвижных частей водоизмещающей конструкции подводного аппарата и взаимно смещает их, так что одна из них - внутренняя входит во внешнюю, деформируя при этом упругий элемент аккумулятора энергии, и запасая, таким образом, потенциальную энергию деформации, а в результате, водоизмещающий объем уменьшается и подводный аппарат погружается, при этом, взаимное положение подвижных частей конструкции подводного аппарата фиксируют в сжатом положении, сохраняя минимальное водоизмещение аппарата до достижения нижней точки траектории, где подвижные части освобождают, что позволяет силе упругости аккумулятора энергии раздвинуть их, увеличив тем самым, водоизмещение подводного аппарата и он начинает всплывать, а достигнув морской поверхности, аппарат снова получает электроэнергию от солнечных батарей и цикл может повторяться неограниченно, при этом изменении водоизмещения знак метацентрической высоты аппарата не меняется, что достигают балластировкой - навеской твердого балласта и плавучести.
Сущность изобретения
Сущность изобретения поясняют Фиг. 1 и Фиг. 2. На Фиг. 1 приведены термодинамические данные [4] некоторых низкокипящих рабочих тел, для которых представлены зависимости упругости парогаза для разных температур: в том числе для фреонов, сжиженных газов и синтетических хладагентов, используемых в холодильной технике. В зависимости от конкретной задачи конструктор может выбирать подходящее вещество или подходящую комбинацию.
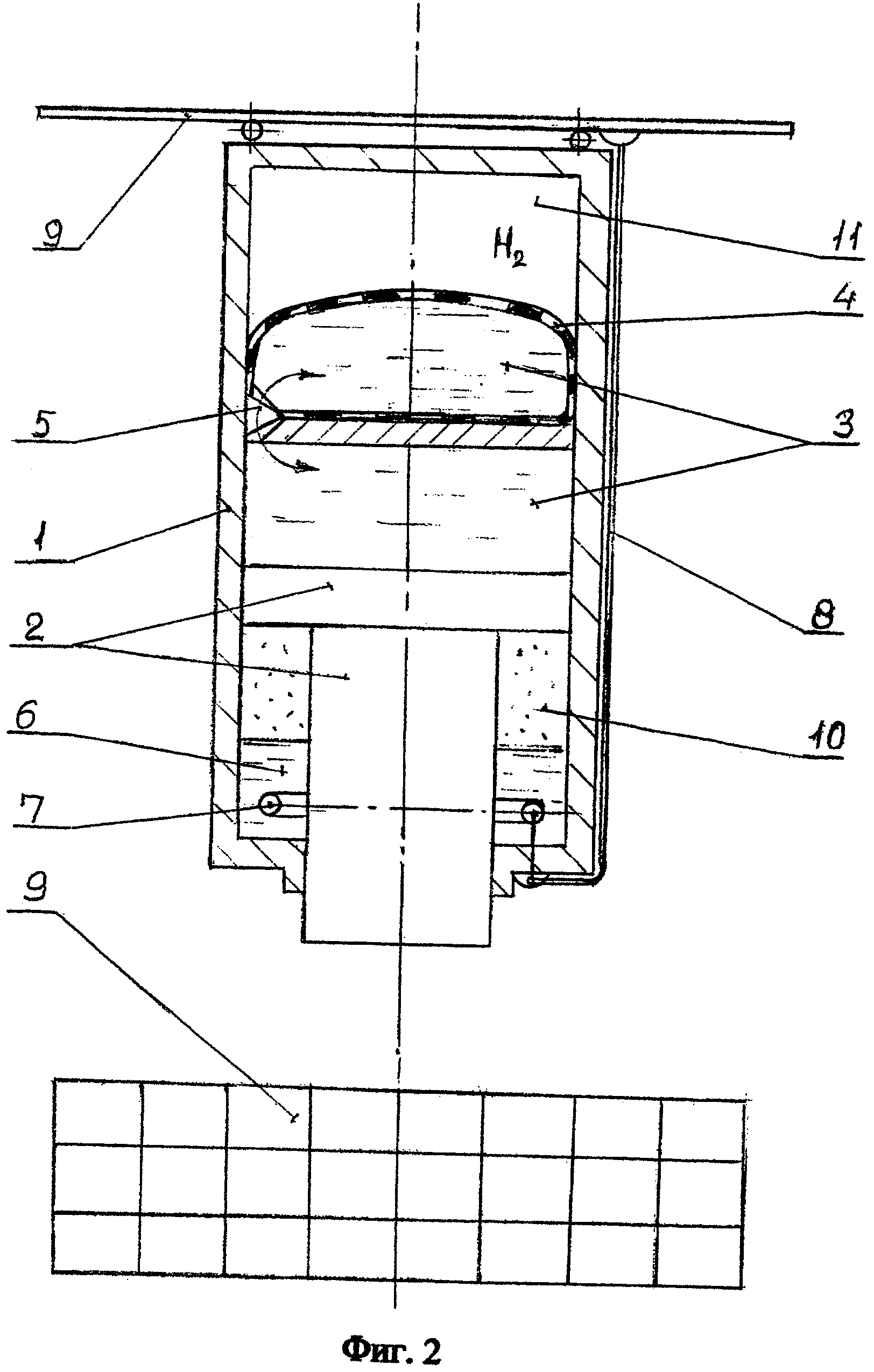
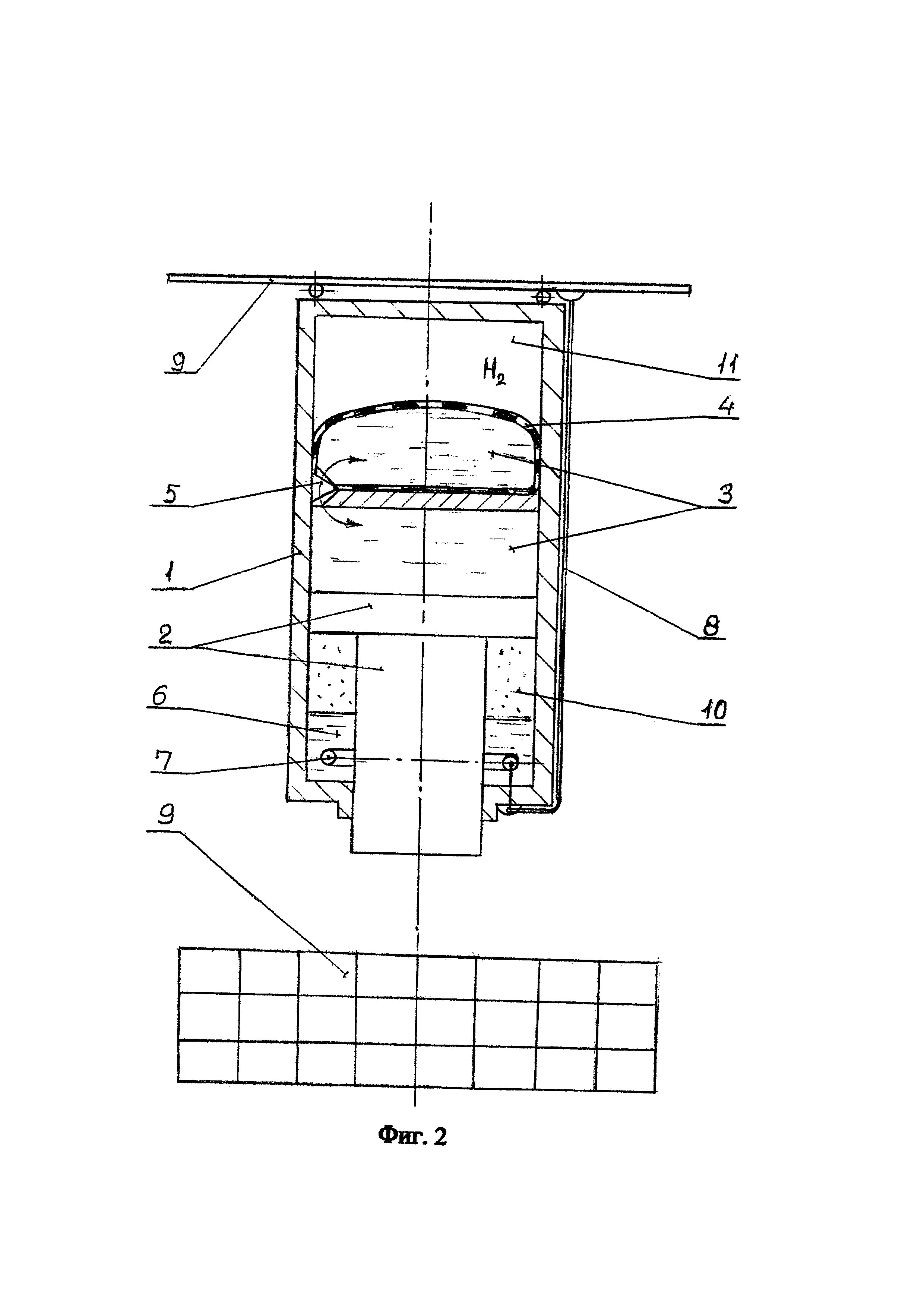
На Фиг. 2 представлена принципиальная схема устройства иллюстрирующего процесс управления водоизмещением подводного аппарата с помощью электрического подогрева рабочего тела от солнечных батарей.
Способ реализуется следующим образом. На фиг. 2 показано схематично вариант конструкции подводного аппарата изменяемого водоизмещения, где 1 - это прочный цилиндрический корпус аппарата, в котором может двигаться шток-поршень 2 (водоизмещающие подвижные частями подводного аппарата) и давить на жидкость 3 - (технологическое масло), «передавливая» его в эластичный упруго-деформируемый резервуар 4 через управляемый клапан разгрузки 5. В полость между стенкой корпуса 1 и шток-поршнем 2 помещена низкокипящая жидкость 6, в которой смонтирован электронагреватель 7, подключенный кабелем 8 к солнечным батареям 9, обращенным к солнцу, когда аппарат достигает поверхности моря. Электроэнергия, получаемая от батарей, нагревает низко кипящую жидкость до кипения, производя равновесный парогаз 10, давление которого соответствует температуре кипения. Это давление перемещает шток-поршень вверх, выдавливая масло 3 через управляемый клапан 5 в эластичный резервуар 4, с наружной стороны которого находится рабочий газ 11, аккумулирующий давление, начальное (заправочное) давление которого соответствует горизонту погружения. При этом шток поршень 2 втягивается в прочный цилиндр 1. В результате, общий водоизмещающий объем аппарата уменьшается и он начинает погружаться, при этом клапан 5 закрывают, а шток-поршень фиксируют в верхнем положении. Проектная плавучесть аппарата рассчитана так, что если шток поршень полностью «втянут» в цилиндр, то аппарат имеет отрицательную плавучесть, а при полностью «выдвинутом» -положительную плавучесть. Этого добиваются балластировкой: добавлением или уменьшением «плавучестей» и балласта в процессе проектирования.
При достижении заданного горизонта, освобождают шток-поршень и открывают клапан 5, тогда аккумулирующий рабочий газ, сжатый давлением парогаза в процессе его образования, начнет перемещать своим давлением масло 3 в полость поршня, перемещая, при этом, шток-поршень наружу, увеличивая, водоизмещение аппарата и он начнет всплывать. Поднявшись до поверхности моря, солнечные батареи снова начнут вырабатывать электричество и включат нагреватели низкокипящей жидкости. Процесс будет повторяться неограниченное число циклов, пока имеется солнечный свет. Весь процесс управляется микроконтроллером, выполняющим измерения, для которых предназначен аппарат, регистрирует их в памяти или передает через ГЛОНАС.
Возможность реализация способа.
Способ может быть реализован устройством близким к показанному на Фиг. 2 или иным, сохраняющим энергетическую функциональность и принцип управления водоизмещением, используя любой аккумулятор энергии упругости.
Источник солнечной энергии из кремневых фотоэлементов, которые выпускается промышленностью во множестве: [5] Их конструкция может быть любой и практически любой собирающая площадь. Единственное требование к нему: минимально мешать вертикальному движению подводного аппарата и быть устойчивым к морской воде. Значение КПД панели получают путем деления мощности электрической энергии на мощность солнечного света, падающего на панель. Распространены два вида фотоэлектрических преобразователей: сделанные из монокристаллического и поликристаллического кремния. Они отличаются технологией производства. Первые имеют К.П.Д. до 25%, а вторые - 15%. Кремниевые фотоэлектрические преобразователи используют только инфракрасную часть солнечного спектра. Энергия остальной части отражается без пользы. Этим объясняются низкие значения КПД.
Один из оптимальных вариантов для использования в космосе и воде сегодня это батареи на основе полупроводников из Cd-Te. Они являются одними из самых перспективных в земной солнечной энергетике. Ввиду низкой себестоимости.
В качестве полупроводников используются также: медь, индий и селен, иногда некоторые элементы индия замещают галлием. Эта технология позволяет получать пленочные солнечные батареи на основе селенида меди-индия. Они имеют КПД равный 15-20% и также могут использоваться на подводных аппаратах.
Корпус подводного аппарата - прочная цилиндрическая часть может быть изготовлена их легированной нержавеющей стали типа 12Х18Н10Т по ТУ 1414-033-03455343-2010 [6].
Кроме того, можно использовать сплав АМг-6 с глубоким анодированием, часто употребляемым в океанологии. [7].
Существенные отличия и преимущества предлагаемого изобретения в том, что в отличие от прототипа и аналогов, которые используют пассивную часть солнечной энергии рассеянную в толще океана и потому имеющей незначительный тепловой поток к рабочему телу - низкокипящей жидкости, данное решение активно использует солнечную энергию с помощью солнечных батарей, с практически не ограниченной собирающей поверхности, и независимо от температуры морской воды, при этом, не зависит от теплопроводности конструкции и коэффициентов теплопереноса, но и не препятствуя теплообмену теплопроводной конструкцией аппарата с морской водой. Использование солнечных электробатарей позволяет сконцентрировать тепло в объеме нагревателя внутри рабочего тела, увеличивая испаряемость и давление парогаза. Мощность электроэнергии солнечных батарей определяется их площадью и коэффициентом преобразования солнечной энергии в электрическую - фотоэффектом. Использование электроэнергии позволяет легко управлять процессом парообразования. Приведенные аргументы позволяют использовать изобретение не только в теплых экваториальных морях, но и в незамерзающих акваториях холодных морей Мирового Океана.
Список использованных источников
1. Комаров В С, Ястребов B.C. АС СССР №1519102; В63В 21/52 от 26.11.1987 г.
2. Морозов А.К. Патент РФ №2081782; B63G 8/24, - 22/00/от 17.09.1997 г.
3. Комаров В С., Морозов А.К. Патент ФР №2124457; В63В 22/00; B63G 8/24 от 10.01.1999 г.
4. Холодильное оборудование от «Ксирон - холод», http://www.xiron.ru/.
5. Солнечные энерго-источники http://altenergiya.ru/sun/mnogoobrazie-vidov-solnechnyx-panelej.html/.
6. ГОСТ-ы легированных сталей, http://www.mpstar.ru/.
7. ГОСТ-ы Алюминий-магниевых сплавов, http://www.splav-kharkov.com/.
Способ передвижения по вертикали подводного аппарата за счет солнечной энергии, использующий управление его плавучестью, воздействуя на управляемую конструкцию его водоизмещающего объема работой давления упругого парогаза низкокипящей жидкости, помещенной между подвижными частями водоизмещающей конструкции подводного аппарата, отличающийся тем, что в низкокипящую жидкость подают тепловую энергию посредством электронагревателя, размещенного внутри низкокипящей жидкости, которую в верхней точке траектории аппарата подогревают омическим теплом от солнечных батарей, расположенных на внешней поверхности подводного аппарата и обращенных к солнцу, воспринимая его излучение, вырабатывающих электрический ток, который подают на нагреватель, смонтированный внутри низкокипящей жидкости, а последняя, нагреваясь и испаряясь, создает парогаз, давление которого действует на поверхности подвижных частей водоизмещающей конструкции подводного аппарата и взаимно смещает их, так что одна из них – внутренняя, входит во внешнюю, деформируя при этом упругий элемент аккумулятора энергии и запасая, таким образом, потенциальную энергию его деформации, а в результате водоизмещающий объем уменьшается и «сжатый» подводный аппарат погружается, кроме того, взаимное положение подвижных частей конструкции подводного аппарата в верхней точке траектории фиксируют в сжатом положении, сохраняя минимальное водоизмещение аппарата до нижней точки траектории аппарата, где парогаз конденсируется за счет теплоотвода в воду и давление его падает, тогда подвижные части освобождают и сила упругости аккумулятора энергии раздвигает их, увеличивая тем самым водоизмещение, которое заставляет аппарат всплывать, а достигнув морской поверхности, аппарат снова получает электроэнергию от солнечных батарей и цикл может повторяться, при этом изменения водоизмещения не меняют знак метацентрической высоты аппарата, который предварительно уравнивают навесными балластом и плавучестью.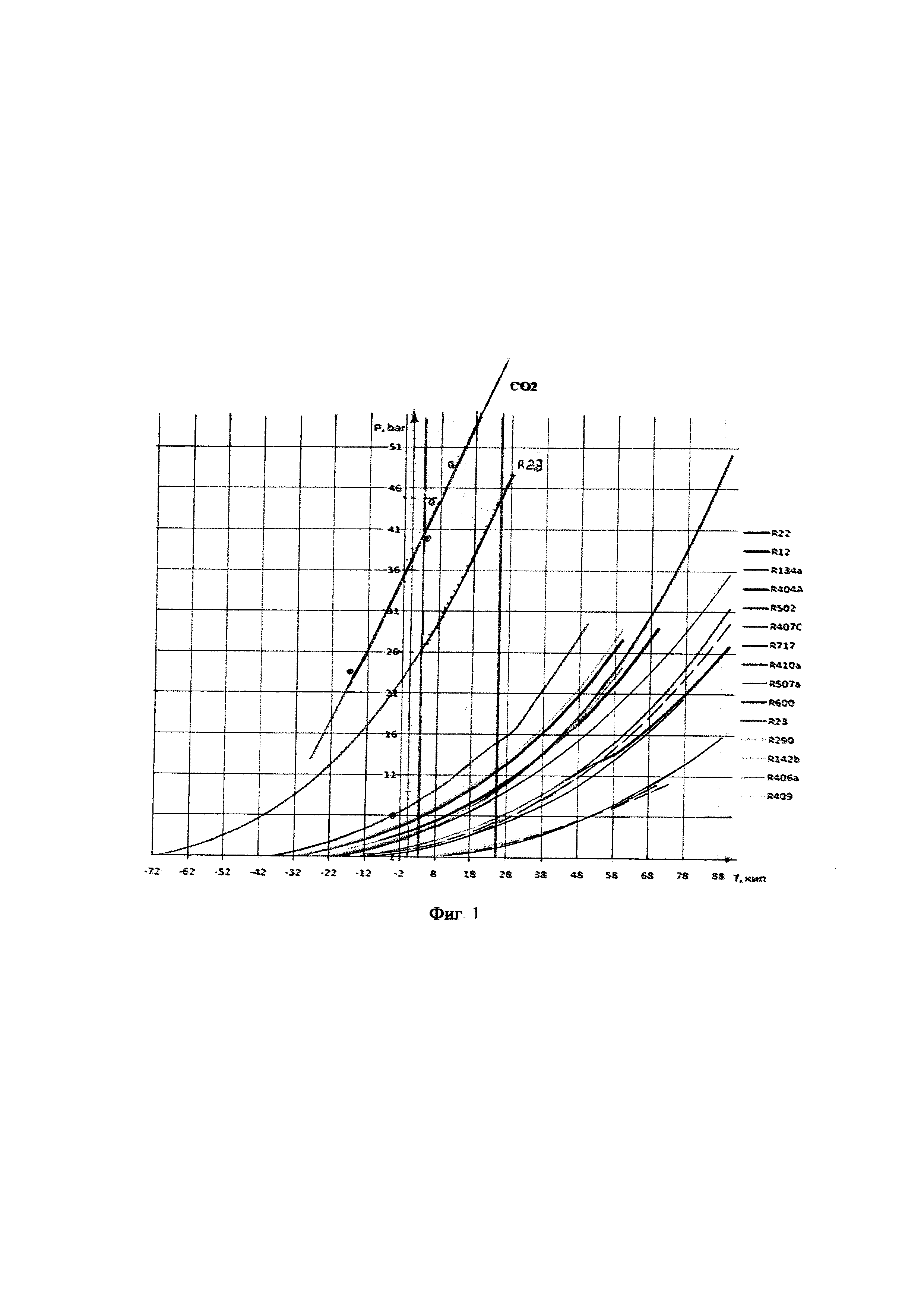
Способ управления плавучестью подводного аппарата робота-зонда
Способ функционирования и постановки притопленного океанологического буя и устройство для его осуществления
Гидроакустический способ определения местоположения автономного подводного аппарата
Передвижной прозрачный опытовый бассейн
Устройство для реализации способа передвижения по вертикали подводного аппарата за счёт солнечной энергии, использующее управление его плавучестью
Вертикальный опытовый бассейн
Локационный уровнемер
Кардиомонитор
Маневровый телеуправляемый подводный аппарат

