Результат интеллектуальной деятельности: ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к области подводной навигации, а более точно, к определению местоположения подводного объекта посредством гидроакустической навигационной системы. Изобретение может быть использовано, например, для определения направления и дальности до подводного объекта, автономного или телеуправляемого аппарата, а также местоположения донной станции.
Известен способ навигации с ультракороткой базой [1], где исследуемый полигон акватории координируют тремя акустическими маяками ответчиками, с которыми подводный аппарат взаимодействует, получая запрос и передавая свой акустический сигнал, а маяки передают на судно обеспечения их расстояния до аппарата. На судне вычисляют координаты аппарата как точку пересечения трех сфер. Известный способ громоздок, требует больших затрат судового времени для развертывания и дорог в эксплуатации.
Наиболее близок к заявляемому способ [2], где на подводный аппарат устанавливают транспондер - пингер ответчик, а на судно - приемник с антенной и акустический генератор, который генерирует импульс запроса, улавливая импульс запроса, транспондер отвечает своим импульсом. Измеряя половину временного интервала между импульсами запроса и ответа, определяют расстояние до местоположения подводного аппарата.
Известный способ имеет тот недостаток, что не способен определить координаты местоположения аппарата, а также должен расходовать энергию на перемещение веса транспондера.
Предлагаемое решение, как совокупность существенных отличительных признаков, позволит избежать указанных недостатков, связанных с необходимостью размещать на подводном аппарате громоздких и энергоемких устройств в виде транспондеров и дорогостоящей установки на грунте маяков ответчиков, что позволит оперативно проводить поиск и контроль за работой подводного аппарата.
Техническим результатом, ожидаемым от использования предлагаемого изобретения, является устранение указанных недостатков, т.е. обеспечение возможности определения хотя бы приближенного местоположения подводного аппарата для более точного координирования его на грунте дна с переменным рельефом.
Поставленная цель достигается тем, что в известном гидроакустическом способе определения относительно судна обеспечения местоположения автономного подводного аппарата, снабженного акустическим излучателем, в качестве которого устанавливают пингер [3], излучающий непрерывно стандартные периодические сигналы, начало которых предварительно синхронизуют с судовым генератором аналогичных опорных сигналов, при этом сигналы пингера принимают судовой антенной, усиливают и передают на вход измерителя временного смещения (смесителя), а на второй вход которого подают опорные сигналы судового генератора, где сравнивают их с принятыми одноименными сигналами пингера и, таким образом, вычисляют их временное смещение ΔT относительно одноименных опорных сигналов, умножая которое на скорость звука «с», получают расстояние «R» по лучу от пингера до антенны:
R=ΔT*c,
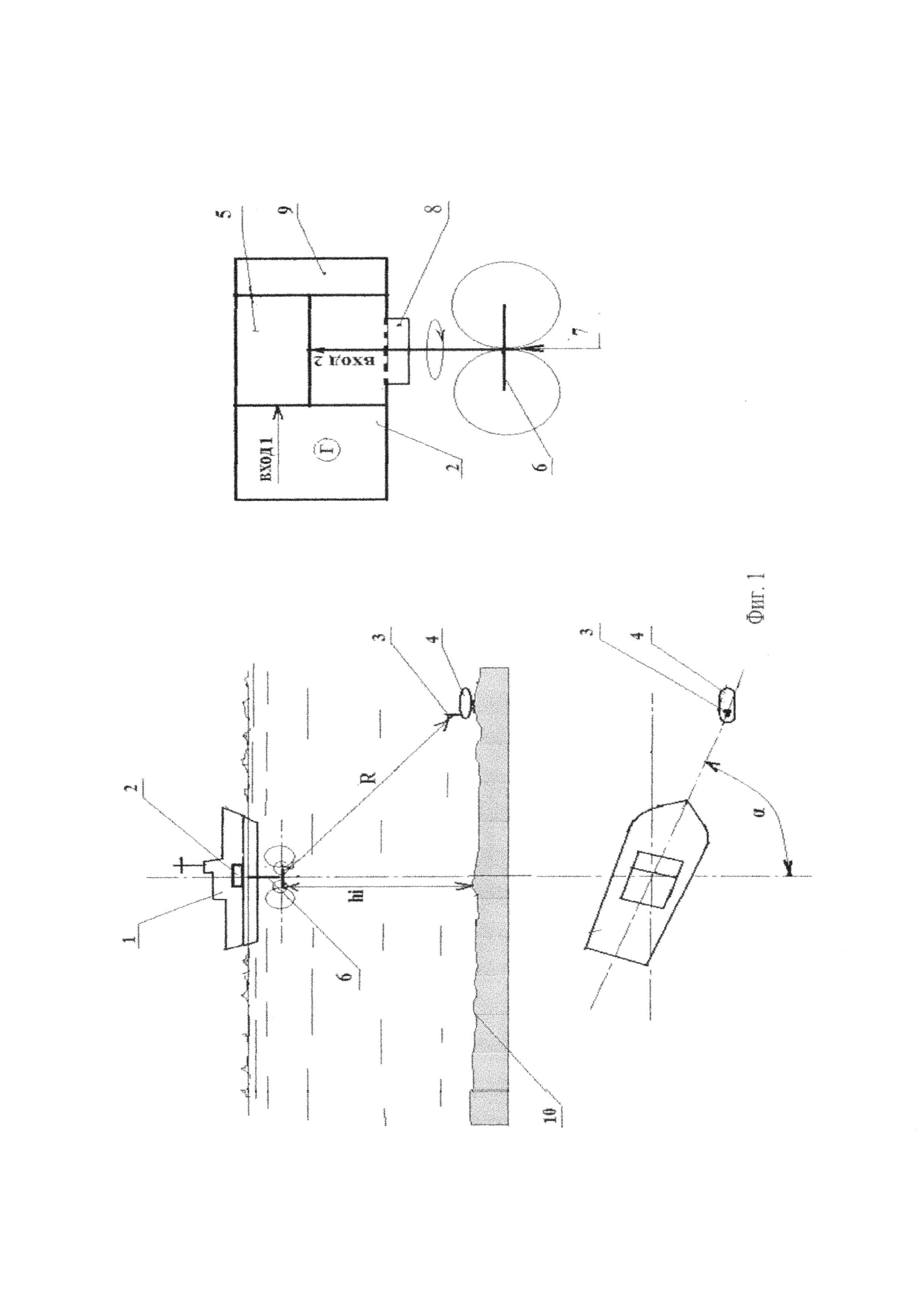
вместе с тем, используя судовую приемную антенну дипольного типа с явным «min» диаграммы направленности и вращая ее относительно вертикальной оси, фиксируют пеленг α пингера подводного аппарата относительно судовых координат по min амплитуды принимаемого сигнала, а также, используя судовой эхолот, определяют глубину акватории h, затем из геометрического построения прямоугольного треугольника, где R - гипотенуза, h - катет, а второй катет определяют, как лежащий на горизонтальной поверхности дна, что в совокупности с углом пеленга определяет ориентировочные относительно судна координаты подводного аппарата.
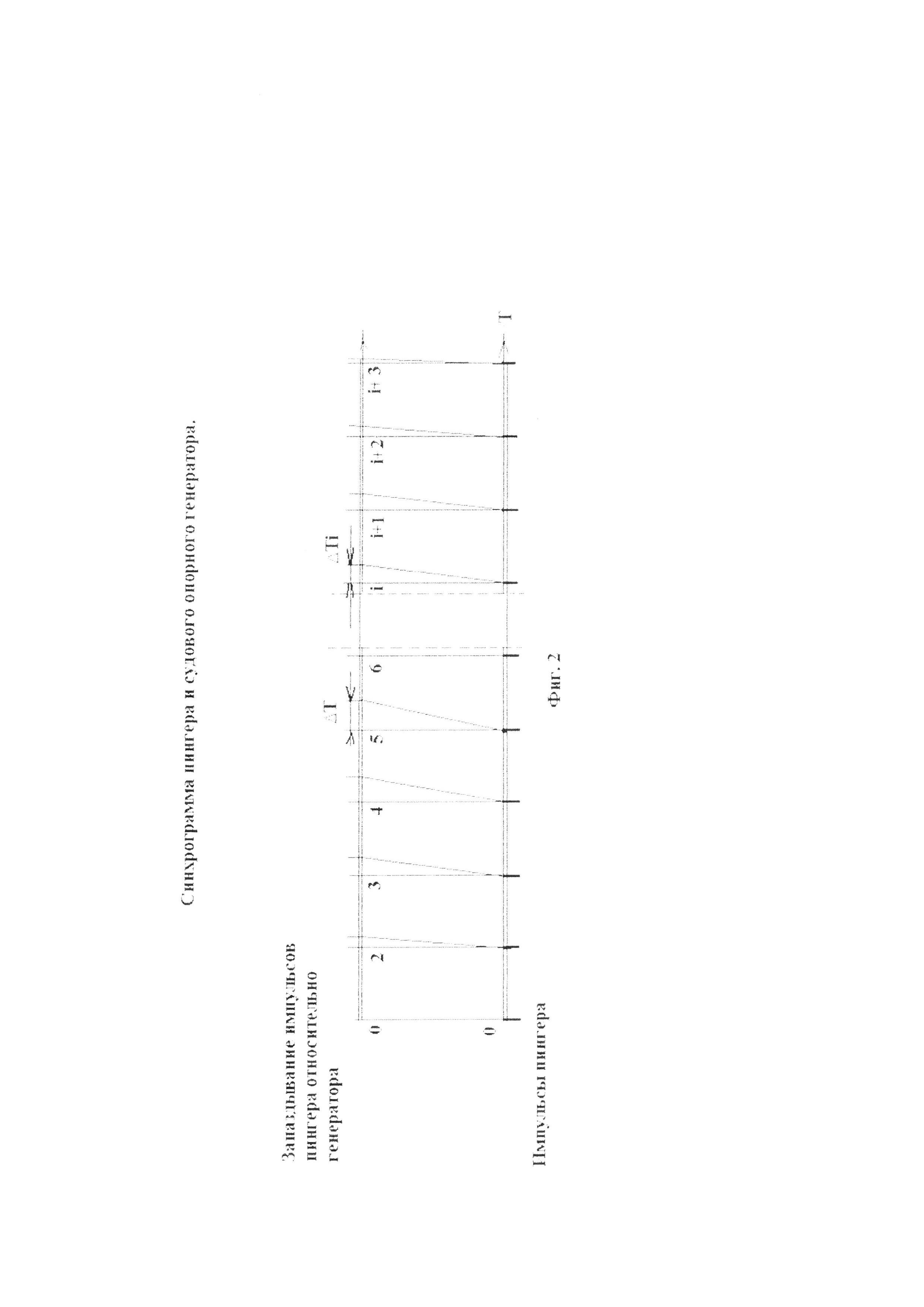
Сущность изобретения показана на Фиг. 1 и 2. Предлагаемый способ реализуется следующим образом. Установленный на судне обеспечения 1 генератор опорных стандартных сигналов 2 той же частоты, что и пингер 3 на подводном аппарате 4, включают одновременно с пингером. Таким образом, оба источника синхронизованы. Их излучение подается на два входа (Вх.1 и Вх.2) измерителя временного смещения 5, который может быть встроенным в судовой измерительный блок вместе с генератором 2. При этом блок 5 имеет гидрофонную антенну 6, через которую принимаются сигнал пингера, и подается на второй вход (Вх.2) измерителя смещения, где оба одноименных сигнала сопоставляются, и определяется величина их смещения (а.и. запаздывание сигнала пингера ΔT). Для приема сигналов пингера используют антенну гидрофона 6 дипольного типа с явно выраженным минимумом 7 и имеющую привод 8 для вращения вокруг вертикальной оси. Это позволяет определять направление α (пелинг) на подводный аппарат в горизонтальной проекции по «min» 7 сигнала от пингера. На выходе смесителя получается циклограмма Фиг. 2 регистрации положения импульсов генератора и приходящих импульсов пингера, позволяющая регистрировать ΔT запаздывание импульсов пингера относительно соответствующих импульсов генератора.
Все суда оборудованы глубомером. Чаще всего это эхолот. Величина Ri=ΔTi*c, где c - скорость звука в воде (1500 м/с), есть расстояние от антенны до пингера по лучу в i - момент времени, для которого эхолот определяет hi глубину горизонтального дна, тогда из геометрического построения прямоугольного треугольника, где Ri и hi соответственно, гипотенуза и катет, удается построить место положения подводного аппарата. Оно не может быть названо «точно координатами», т.к. рельеф дна не является горизонтальной плоскостью, но приближенно (с точностью до масштаба кривизны рельефа) локализация подводного аппарата может быть определена и поиск его, например, дайвером существенно облегчен. В последнее время количество подводных аппаратов возросло настолько, что можно говорить о направлении в индустрии, а возможность поиска и спасения дорогостоящего изделия интересует их владельцев.
В качестве судна обеспечения обычно используют водолазное или экспедиционное судно типа «Ашамба» или «Рифт» и др. В качестве судового эхолота может использоваться эхолот-глубиномер JJ-CONNECT Fisherman 130 или цифровой GSD22. Для основы измерителя временного смещения можно использовать двухлучевой осциллограф типа С1-55 или многолучевой запоминающий типа С8, С9 [4] осциллографы запоминающие. Последние предпочтительней, т.к. позволяют синхронно с циклограммой фиксировать курс судна и пеленг на аппарат. В качестве доступного пингера для такого аппарата использованием стандартного пингера, такого как, например, ELP-362A, который излучает акустические импульсы на частоте 37.5 кГц с периодом 1 с, что позволяет однозначно определять расстояние до подводных объектов на расстоянии до 750 м для аппаратов «ГНОМ» или «Видеорей».
Вышеперечисленные существенные признаки позволяют избежать громоздких технологий, обеспечить простой поиск и отслеживание местоположения подводного аппарата и определить расстояние до него.
Источники информации
1. ГАНС УКБ http://edboe.ru/. ОКБ ОТ.
2. Acoustic Target Transponder АТТ-400
http://www.rjeint.com/templates/theme1577/pdf/ATT400-RevB.pdf.
3. Пингер ELP-362A. http://pdf.nauticexpo.com/pdf/teledyne-benthos/locator-product-catalog-2012/40202-49557.html#open.
4. http://www.priborstandart.ru/about/#SITE_DIR#. ООО «Прибор - Стандарт».
Гидроакустический способ определения местоположения автономного подводного аппарата, снабженного акустическим излучателем, относительно судна обеспечения, отличающийся тем, что в известном гидроакустическом способе определения относительно судна обеспечения места положения подводного аппарата в качестве излучателя устанавливают пингер, излучающий непрерывно стандартные периодические сигналы, начало которых предварительно синхронизуют с судовым генератором аналогичных опорных сигналов, при этом сигналы пингера принимают судовой антенной, усиливают и передают на вход измерителя временного смещения (смесителя), а на второй вход которого подают опорные сигналы судового генератора, где сравнивают их с принятыми одноименными сигналами пингера и, таким образом, вычисляют их временное смещение ΔТ относительно одноименных опорных сигналов, умножая которое на скорость звука «с», получают расстояние «R» по лучу от пингера до антенны:R=ΔТ*c,вместе с тем, используя судовую приемную антенну дипольного типа с явным «min» диаграммы направленности и вращая ее относительно вертикальной оси, фиксируют пеленг α пингера подводного аппарата относительно судовых координат по min амплитуды принимаемого сигнала, а также, используя судовой эхолот, определяют глубину акватории h, с помощью которой из геометрического построения прямоугольного треугольника, где R - гипотенуза, h - катет, а второй катет, как проекцию гипотенузы R, на горизонтальную поверхности дна, что в совокупности с углом пеленга определяет местоположения и ориентировочные относительно судна координаты подводного аппарата.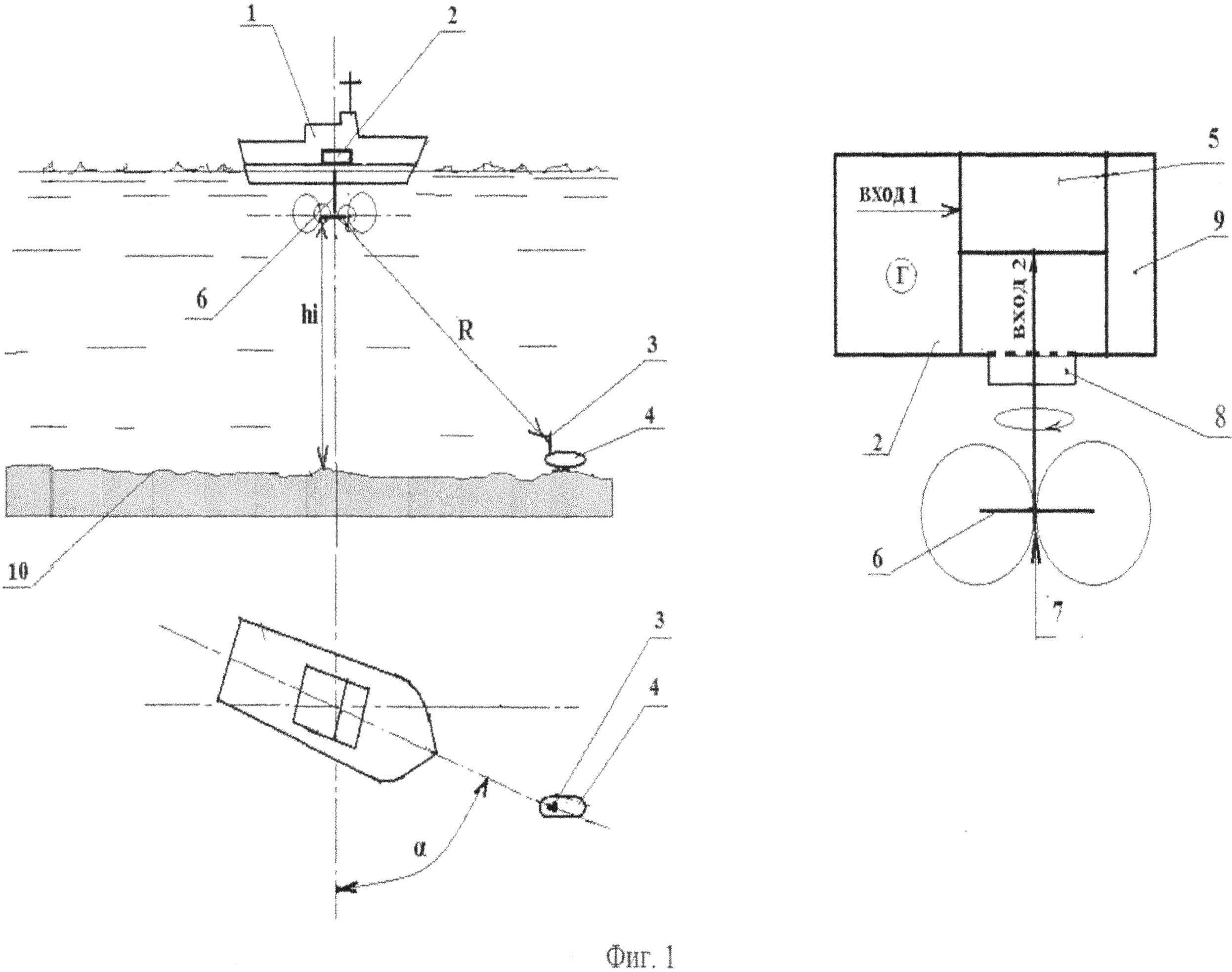
Способ управления плавучестью подводного аппарата робота-зонда
Способ функционирования и постановки притопленного океанологического буя и устройство для его осуществления
Передвижной прозрачный опытовый бассейн
Способ управления плавучестью подводного аппарата робота-зонда
Модульная донная станция
Способ функционирования и постановки притопленного океанологического буя и устройство для его осуществления
Устройство для регулярного отбора воды с контролируемых глубин океана
Инкубатор и способ инкубации проб воды
Способ добычи газогидратов и подводный комбайн для его осуществления
Зонд гидролого-оптико-химический
Способ и устройство для измерения скорости течений и волновых процессов в океане
Буровая установка ракитина и.я. для подводного аппарата
Способ обнаружения шторма в океане со спутника

