Результат интеллектуальной деятельности: Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала
Вид РИД
Изобретение
Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ поиска неисправного блока в непрерывной динамической системе (Способ поиска неисправного блока в непрерывной динамической системе: пат. 2461861 Рос. Федерация: МПК7 G05B 23/02 (2006.01) / Шалобанов С.С. - №2011140376/08; заявл. 04.10.2011; опубл. 20.09.2012, Бюл. №26).
Недостатком этого способа является то, что он использует вычисление знаков передач сигналов от выходов блоков до контрольных точек.
Наиболее близким техническим решением (прототипом) является способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала (Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала: пат. 2528135 Рос. Федерация: МПК7 G05B 23/02 (2006.01) / Шалобанов С.С. - №2013144231/08; заявл. 01.10.2013; опубл. 10.09.2014, Бюл. №25).
Недостатком этого способа является то, что он предполагает использование сложных диагностических признаков наличия дефекта в структурном блоке системы.
Технической задачей, на решение которой направлено данное изобретение, является уменьшение аппаратных и вычислительных затрат, связанных с реализацией вычисления диагностических признаков наличия дефекта.
Поставленная задача достигается тем, что предварительно регистрируют реакцию заведомо исправной системы ƒj ном(t), j=1, …, k на интервале t∈[0,TK] в k контрольных точках, и определяют интегральные оценки выходных сигналов F j ном(α), j=1, …, k системы, для чего в момент подачи входного сигнала на вход системы с номинальными характеристиками одновременно начинают интегрирование сигналов системы управления в каждой из k контрольных точек с весами e-αt, где  , путем подачи на первые входы k блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов Fj ном(α), j=1, …, k регистрируют, фиксируют число m блоков системы, определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек и каждой из m позиций входного сигнала, полученные в результате смены позиции входного сигнала после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают место подачи входного сигнала на выход каждого блока, подают через сумматор входной сигнал и находят интегральные оценки выходных сигналов системы для параметра α и входного сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждой из m моделей с различной (зафиксированной на выходах разных блоков) позицией входного сигнала Yji(α), j = 1, …, k; i = 1, …, m регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков ΔYji(α)=Yji(α)-Fj ном(α), j=1, …, k; i=1, …, m, определяют знаки отклонений интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков singn(ΔYji(α)), j=1, …, k; i=1, …, m, замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал x(t), определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек Fj(α), j=1, …, k для параметра интегрирования α, определяют отклонения интегральных оценок выходных сигналов контролируемой системы для к контрольных точек от номинальных значений ΔFj(α)=Fj(α)-Fj ном(α), j=1, …, k, определяют знаки отклонений интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений sign(ΔFj(α)), j = 1, …, k.
, путем подачи на первые входы k блоков перемножения сигналов системы управления, на вторые входы блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы k блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Тк, полученные в результате интегрирования оценки выходных сигналов Fj ном(α), j=1, …, k регистрируют, фиксируют число m блоков системы, определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек и каждой из m позиций входного сигнала, полученные в результате смены позиции входного сигнала после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают место подачи входного сигнала на выход каждого блока, подают через сумматор входной сигнал и находят интегральные оценки выходных сигналов системы для параметра α и входного сигнала x(t), полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждой из m моделей с различной (зафиксированной на выходах разных блоков) позицией входного сигнала Yji(α), j = 1, …, k; i = 1, …, m регистрируют, определяют деформации интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков ΔYji(α)=Yji(α)-Fj ном(α), j=1, …, k; i=1, …, m, определяют знаки отклонений интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков singn(ΔYji(α)), j=1, …, k; i=1, …, m, замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал x(t), определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек Fj(α), j=1, …, k для параметра интегрирования α, определяют отклонения интегральных оценок выходных сигналов контролируемой системы для к контрольных точек от номинальных значений ΔFj(α)=Fj(α)-Fj ном(α), j=1, …, k, определяют знаки отклонений интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений sign(ΔFj(α)), j = 1, …, k.
Затем производят операцию попарного сравнения элементов вектора знаков отклонений интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков i-го блока sign(ΔYji(α)), j=1, …, k; i=1, …, m и вектора знаков отклонений интегральных оценок sign(ΔFj(α)), j=1, …, k, по формуле:

Поскольку операция ≡ есть операция эквивалентности, то выражение (1) принимает значение 1 только в том случае, когда все элементы векторов sign(ΔYji(α)), j=1, …, k и sign(ΔFj(α)), j = 1, …, k для каждой контрольной точки попарно равны.
Затем производят операцию попарного сравнения элементов инверсии вектора топологических связей i-го блока inv(sign(ΔYji(α)), j=1, …, k; i=1, …, m, и вектора знаков отклонений интегральных оценок sign(ΔFj(α)), j=1, …, k, по формуле:

Поскольку операция ≡ есть операция эквивалентности, то выражение (2) принимает значение 1 только в том случае, когда все элементы векторов inv(sign(ΔYji(α))), j=1, …, k. и sign(ΔFj(α)), j=1, …, k, для каждой контрольной точки попарно равны.
Затем производят вычисление бинарных диагностических признаков из соотношения:

Первое слагаемое формулы (3) принимает значение 1, если знаки отклонений интегральных оценок выходных сигналов контролируемой системы от номинальных значений совпадают с элементами вектора знаков отклонений интегральных оценок выходных сигналов модели, полученных в результате перемещения позиции входного сигнала, второе слагаемое формулы (3) принимает значение 1, если знаки отклонений интегральных оценок выходных сигналов контролируемой системы от номинальных значений совпадают с инвертированными элементами вектора знаков отклонений интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала. Инверсия вектора знаков отклонений интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков учитывает возможность проявления дефекта одного и того же блока как со знаком плюс (например увеличение значения параметра блока), так и со знаком минус (например уменьшение значения параметра блока).
По единичному значению бинарного диагностического признака определяют структурный блок с дефектом.
Таким образом, предлагаемый способ поиска неисправного блока сводится к выполнению следующих операций:
1. В качестве динамической системы рассматривают систему, состоящую из произвольно соединенных m динамических блоков.
2. Предварительно определяют время контроля ТК ≥ ТПП, где ТПП - время переходного процесса системы. Время переходного процесса оценивают для номинальных значений параметров динамической системы.
3. Определяют параметр интегрального преобразования сигналов из соотношения  .
.
4. Фиксируют число контрольных точек k.
5. Предварительно определяют векторы знаков отклонений интегральных оценок выходных сигналов модели sing(ΔYi(α)), i = 1, …, m, полученные в результате перемещения позиции входного сигнала на позицию после i-го блока каждого из m блоков для номинальных значений параметров передаточных функций блоков и определенного выше параметра α, для чего выполняют пункты 6-10.
6. Подают тестовый сигнал x(t) (единичный ступенчатый, линейно возрастающий, прямоугольный импульсный и т.д.) на вход системы управления с номинальными характеристиками. Принципиальных ограничений на вид входного тестового воздействия предлагаемый способ не предусматривает.
7. Регистрируют реакцию системы ƒj ном(t), j=1, …, k, на интервале t∈[0,ТК] в k контрольных точках и определяют интегральные оценки выходных сигналов Fj ном(α), j=1, …, k, системы. Для этого в момент подачи тестового сигнала на вход системы управления с номинальными характеристиками одновременно начинают интегрирование выходных сигналов системы управления в каждой из k контрольных точек с весами e-αt, где  , для чего сигналы системы управления подают на первые входы k блоков перемножения, на вторые входы блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы к блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Тκ, полученные в результате интегрирования оценки выходных сигналов Fj ном(α), j=1, …, k регистрируют.
, для чего сигналы системы управления подают на первые входы k блоков перемножения, на вторые входы блоков перемножения подают экспоненциальный сигнал e-αt, выходные сигналы к блоков перемножения подают на входы k блоков интегрирования, интегрирование завершают в момент времени Тκ, полученные в результате интегрирования оценки выходных сигналов Fj ном(α), j=1, …, k регистрируют.
8. Определяют интегральные оценки выходных сигналов модели для каждой из k контрольных точек, полученные в результате перемещения позиции входного сигнала на позицию после каждого из m блоков, для чего поочередно для каждого блока динамической системы перемещают позицию входного сигнала на выход блока, подают через сумматор входной сигнал и выполняют пункты 6 и 7 для одного и того же входного сигнала x(t). Полученные в результате интегрирования оценки выходных сигналов для каждой из k контрольных точек и каждой из m моделей с перемещенной позицией входного сигнала Yji(α), j=1, …, k; i=1, …, m, регистрируют.
9. Определяют деформации интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала со входа на позицию после каждого из соответствующих блоков ΔYji(α) = Yji(α)-Fj ном (α), j=1, …, k; i=1, …, m.
10. Определяют знаки отклонений интегральных оценок выходных сигналов модели, полученные в результате перемещения позиции входного сигнала на позицию после каждого из соответствующих блоков sign(ΔYji(α)), j=1, …, k; i=1, …, m.
11. Замещают систему с номинальными характеристиками контролируемой. На вход системы подают аналогичный тестовый сигнал x(t).
12. Определяют интегральные оценки выходных сигналов контролируемой системы для k контрольных точек Fj(α), j=1, …, k, осуществляя операции, описанные в пунктах 6 и 7 применительно к контролируемой системе.
13. Определяют отклонения интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений ΔFj(α) = Fj(α)-Fj ном (α), j=1, …, k.
14. Определяют знаки отклонений интегральных оценок выходных сигналов контролируемой системы для k контрольных точек от номинальных значений sign(ΔFj(α)), j=1, …, k.
15. Производят операцию попарного сравнения элементов вектора знаков отклонений интегральных оценок выходных сигналов модели, полученные в результате смены позиции входного сигнала i-го блока sign(ΔYji(α)), j=1, …, k; i =1, …, m, и вектора знаков отклонений интегральных оценок sign(ΔFj(α)), j=1, …, k, по формуле:

16. Производят операцию попарного сравнения элементов инверсии вектора знаков отклонений интегральных оценок выходных сигналов модели, полученные в результате смены позиции входного сигнала i-го блока inv(sign(ΔYji(α))), j=1, …, k; i=1, …, m, и вектора знаков отклонений интегральных оценок sign(ΔFj(α)), j=1, …, k, по формуле:

17. Производят вычисление бинарных диагностических признаков из соотношения:

18. По единичному значению бинарного диагностического признака определяют структурный блок с дефектом.
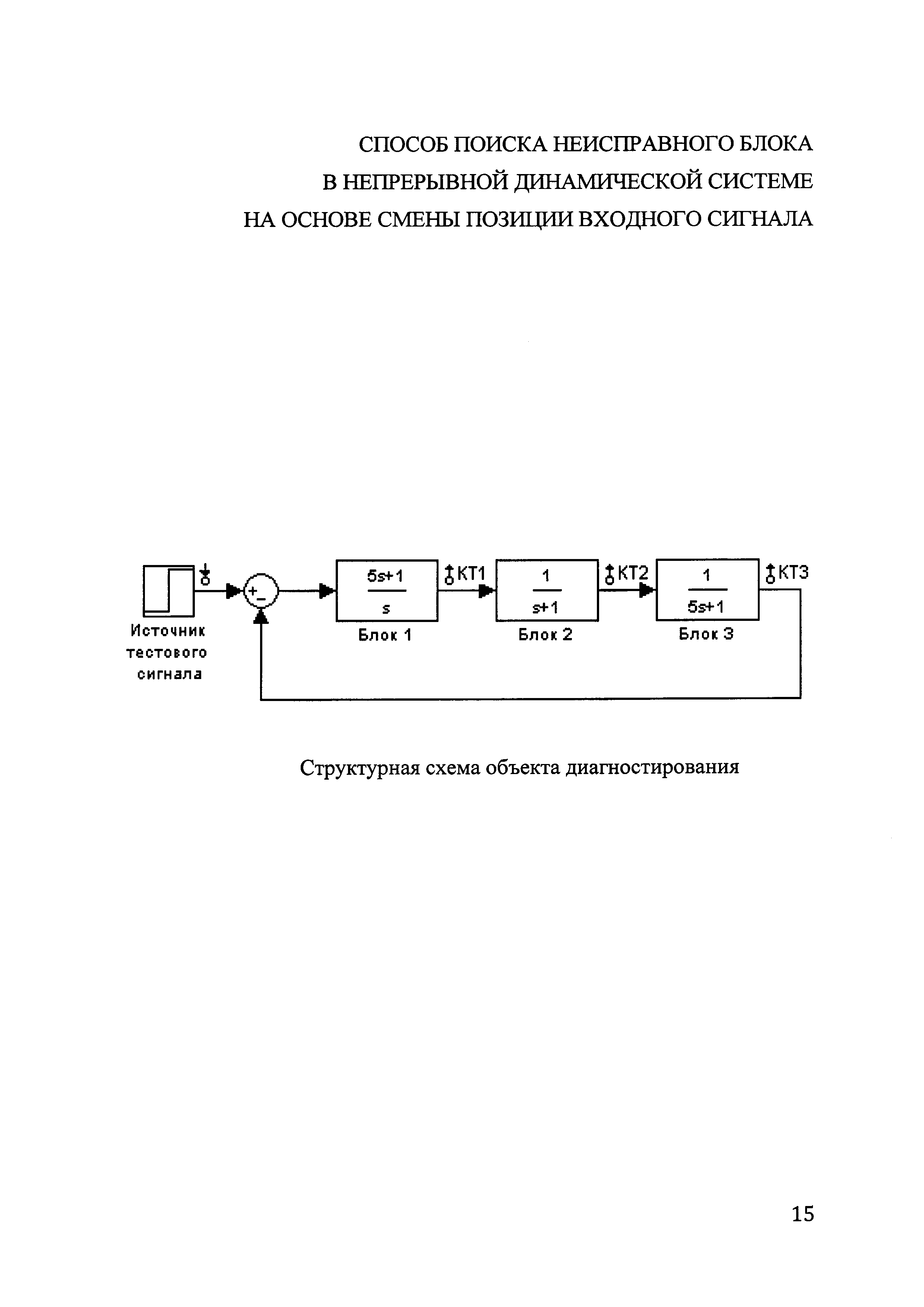
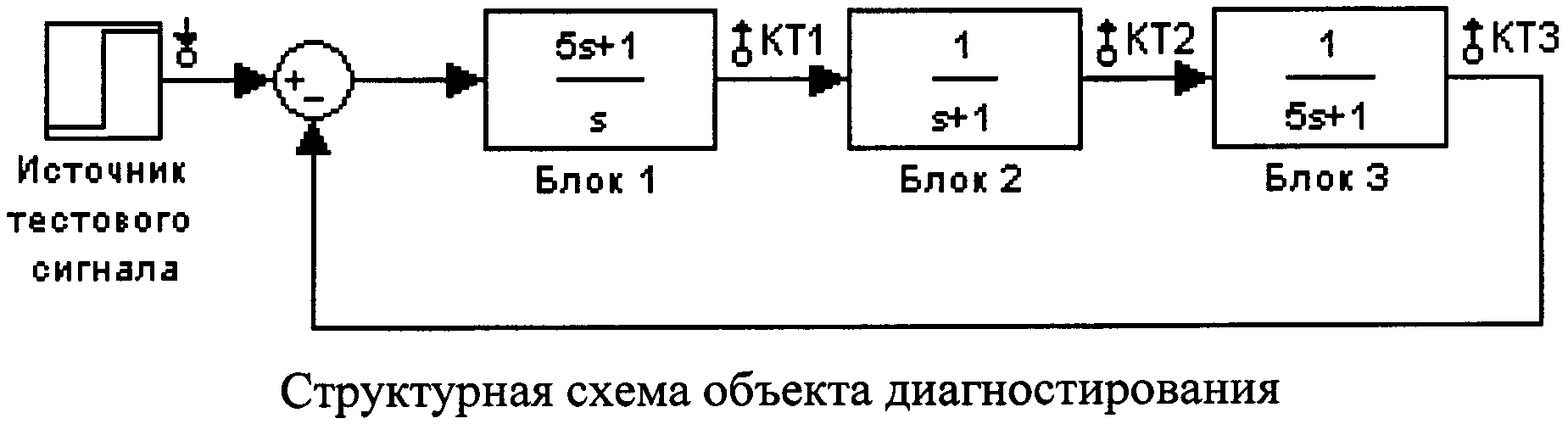
Рассмотрим реализацию предлагаемого способа поиска дефекта для системы, структурная схема которой представлена на рисунке (см. фиг. Структурная схема объекта диагностирования).
Передаточные функции блоков:
 ;
;  ;
;  ,
,
номинальные значения параметров: k1=1; T1=5 с; k2=1; Т2=1 с; k3=1; Т3=5 с.
При поиске одиночного дефекта в виде отклонения постоянной времени Т1=4с (дефект №1) в первом звене путем подачи ступенчатого тестового входного сигнала единичной амплитуды и интегральных оценок сигналов для параметра α=0.5 и Тκ=10 с получены значения бинарных диагностических признаков наличия дефекта по формуле (3) при использовании трех контрольных точек, расположенных на выходах блоков. Дефект, вычисленный по формуле (3), дает следующие значения бинарных диагностических признаков: J1=1; J2=0; J3=0.
Моделирование процессов поиска дефектов во втором и третьем блоках для данного объекта диагностирования, при том же параметре интегрирования α и при единичном ступенчатом входном сигнале дает следующие значения бинарных указателей:
При наличии дефекта в блоке №2 (в виде уменьшения параметра Т2 на 20%, дефект №2): J1=0; J2=1; J3=0.
При наличии дефекта в блоке №3 (в виде уменьшения параметра Т3 на 20%, дефект №3): J1=0; J2=0; J3=1.
Единичное значение бинарного диагностического признака во всех случаях правильно определяет дефектный блок.




Способ токарной обработки заготовок из углепластика
Жидкостно-газовый эжектор
Способ получения материалов на основе алюминида никеля
Способ сортирования волокнистых материалов
Жидкостно-газовый эжекторный аппарат
Роторно-пульсационный аппарат
Сейсмоакустический преобразователь
Смеситель для смешивания жидких и вязких материалов
Генератор для получения талой питьевой воды
Смеситель для жидких и вязких материалов
Способ поиска неисправного блока в непрерывной динамической системе на основе функции чувствительности
Способ поиска неисправностей динамического блока в непрерывной системе на основе введения пробных отклонений
Способ поиска неисправного блока в непрерывной динамической системе на основе введения пробных отклонений и анализа знаков передач
Способ поиска неисправного блока в непрерывной динамической системе на основе функции чувствительности
Способ поиска неисправного блока в непрерывной динамической системе на основе смены позиции входного сигнала и анализа знаков передач

