Результат интеллектуальной деятельности: Шарообразный робот (варианты)
Вид РИД
Изобретение
Изобретение относится к робототехнике, в частности к сферическим роботам (роботам-интрациклам) с маятниковым движителем, предназначенным, в частности, для научно-исследовательских и охранно-мониторинговых целей.
В настоящее время широкое распространение получают сферические роботы (сферороботы, шаророботы), предназначенные для практического использования, в частности, в составе мультиагентных робототехнических систем.
Так, известен робот-шар, содержащий полую сферу, установленные внутри сферы двигатели, зафиксированные таким образом, что их геометрические оси перпендикулярны друг другу и пересекаются в геометрическом центре сферы, один из двигателей установлен на внутренней поверхности сферы и соединен посредством каркаса, выполненного в форме четверти окружности, со вторым двигателем, установленным на свободном конце упомянутого каркаса и снабженным аналогичным каркасом, связанным с его валом (см. 1. Патент РФ на изобретение №2315686, М. кл. B25J 9/00, B25J 11/00, опубл. 27.01.2008 г.).
Известен также робот-шар, состоящий из корпуса, выполненного в виде полого шара, содержащий внутренний каркас, соединенный с корпусом шарниром, закрепленный на внутреннем каркасе первый электропривод, вал которого соединен с корпусом, также на каркасе закреплен второй электропривод, на обоих концах сквозного вала которого закреплены дебалансы (см. 2. Патент РФ на полезную модель №106215, М. кл. B62D 57/00, опубл. 10.07.2011 г.).
Однако используемые в обоих вышеприведенных аналогах кинематические схемы снижают быстродействие, не позволяя осуществлять все многообразие возможных направлений и траекторий движения, а также двигаться в любом заданном направлении без дополнительных (предварительных) перемещений подвижных масс внутри сферической оболочки.
Известен также и дистанционно управляемый катящийся робот, содержащий полую сферу, имеющую гладкую наружную и внутреннюю поверхности, не менее двух роторов, установленных внутри сферы в диаметральном направлении так, что геометрические оси роторов пересекаются в геометрическом центре сферы; передаточные механизмы, соединяющие диаметрально противоположные роторы, выполняющие также роль элементов каркаса (см. 3. Патент на изобретение США №6414457, М.кл. А63Н 33/00, B25J 5/00, опубл. 02.07.2002 г.).
Однако в данном роботе отсутствует автономное управление, и он не обладает необходимой маневренностью, что обусловлено расположением роторов в конструкции, не позволяющим обеспечить совмещение центра масс системы с геометрическим центром сферической оболочки без дополнительного утяжеления робота, что приводит также к возрастанию момента инерции, снижению быстроты изменения скорости и направления движения робота.
Наиболее близким к заявляемому устройству (в обоих его вариантах) аналогом по назначению и количеству общих существенных конструктивных признаков (прототипом) является шарообразный робот с приводом маятникового типа («малый танк новой конструкции» или «самодвижущаяся огневая точка», автор проекта - гвардии красноармеец Филлипов А.Н., 1943 г.), содержащий самоходное шасси со сферической оболочкой и несущей рамой, размещенной в оболочке посредством опорно-поддерживающих тел качения, с установленным на раме движителем маятникового типа с использованием пары тяговых элементов, разнесенных влево и вправо на одинаковые расстояния от продольной вертикальной плоскости оболочки и сцепленных с внутренней поверхностью оболочки, дифференциальным реверсивным приводом упомянутых тяговых элементов, противовесом для смещения центра масс, автономным источником энергии, системой управления шасси, в совокупности обеспечивающими омнимобильность робота (см. 4. Юрий Пошалок. WORDLS of TANKS. Стальные шары Сталина. Конструирование и производство. - TACTICAL PRESS, 2014 (ISBN 978-5-906074-10-2). - С. 79 (последний абз.), 80 (схема), 81).
В данном роботе привод тяговых элементов выполнен зависимым, общим - с распределением мощности от ДВС и коробки передач через дифференциал автомобильного типа (поз. 4 на схеме) - для каждого тягового элемента, механическим, с соосностью левого и правого тяговых элементов (полуоси поз. 6 на схеме) и несоосностью приводящего его во вращение ДВС с коробкой передач, при этом ось вращения (полуоси поз. 6 на схеме) тяговых элементов расположена горизонтально и поперечно при нижнем расположении тяговых элементов, а ось вращения тел качения совпадает с горизонтальной поперечной осью вращения сферической оболочки (диаметром 1,6 м). Упомянутые тяговые элементы выполнены в виде зубчатых колес, установленных на полуосях (поз. 6 на схеме) после дифференциала и находящихся в зацеплении с зубчатыми венцами на внутренней поверхности сферической оболочки, а опорно-поддерживающие тела качения выполнены в виде подшипников качения (поз. 8 на схеме). Поворот машины предполагался, скорее всего, наклоном рамы (корпуса). Сведения о степени герметичности и плавучести отсутствуют.
Однако при всех своих положительных качествах, данный шарообразный робот относительно сложен конструктивно, имеет низкую маневренность (принцип поворота смещением центра тяжести в поперечной плоскости малоэффективен), центральный привод через дифференциал автомобильного типа, связывающий между собой полуоси с бортовыми тяговыми элементами, не допускает независимого управления скоростями вращения левого и правого тяговых элементов, зубчатые тяговые элементы создают повышенные шумы и вибрации, низок уровень использования принципов унификации и взаимозаменяемости составных частей устройства.
Это обуславливает недостаточно высокие технико-эксплуатационные / тактико-технические характеристики известного устройства-прототипа.
Техническим результатом заявляемого изобретения является повышение технико-эксплуатационных (тактико-технических) характеристик шарообразного робота путем упрощения конструкции, обеспечения унификации и взаимозаменяемости составных частей устройства, повышения его управляемости, снижения шума и вибраций при его работе, а также адаптации системы управления шасси к опыту вождения гусеничных и колесных машин с бортовой схемой поворота.
Достижение указанного результата обеспечивается двумя вариантами конструкции шарообразного робота с приводом маятникового типа, реализующими общий изобретательский замысел.
По первому варианту шарообразный робот содержит самоходное шасси со сферической оболочкой и несущей рамой, размещенной в оболочке посредством опорно-поддерживающих тел качения, установленный на раме движитель маятникового типа с использованием пары тяговых элементов, разнесенных влево и вправо на одинаковые расстояния от продольной вертикальной плоскости оболочки и сцепленных с внутренней поверхностью оболочки, дифференциальный реверсивный привод упомянутых тяговых элементов маятникового типа, противовес для смещения центра масс, автономный источник энергии, систему управления шасси, и отличается тем, что привод тяговых элементов выполнен электромеханическим, независимым и индивидуальным для каждого тягового элемента, и состоит из пары одинаковых моноблоков с электродвигателями, при этом в каждом моноблоке тяговый элемент и приводящий его во вращение электродвигатель соосны, при этом оси тяговых элементов расположены вертикально при нижнем расположении тяговых элементов, а опорно-поддерживающие тела качения установлены вверху шасси на их общей оси, которая расположена горизонтально и поперечно.
При этом для упрощения устройства, повышения его быстродействия и снижения шума при его работе упомянутые опорно-поддерживающие тела качения и тяговые элементы могут быть выполнены в виде роликов, установленных на упомянутых горизонтальной и двух вертикальных осях соответственно, с пружинным поджатием к внутренней поверхности сферической оболочки, обеспечивающим их упругое фрикционное сцепление с оболочкой.
Для повышения унификации устройства при его использовании горизонтальная ось с опорно-поддерживающими телами качения может быть установлена с возможностью ступенчатой регулировки по высоте, по меньшей мере, с двумя фиксированными положениями под сменные сферические оболочки с двумя различными диаметрами.
Для облегчения обеспечения возможности эксплуатации робота в условиях водной среды (обеспечение положительной плавучести и гидроизоляции внутреннего оборудования от забортной воды) и при наличии различных загрязняющих факторов - радиации, инородной атмосферы и т.д. сферическая оболочка может быть выполнена герметичной.
По второму варианту шарообразный робот содержит самоходное шасси со сферической оболочкой и несущей рамой, размещенной в оболочке посредством опорно-поддерживающих тел качения, установленный на раме движитель маятникового типа с использованием пары тяговых элементов, разнесенных влево и вправо на одинаковые расстояния от продольной вертикальной плоскости оболочки и сцепленных с внутренней поверхностью оболочки, дифференциальный реверсивный привод упомянутых тяговых элементов маятникового типа, противовес для смещения центра масс, автономный источник энергии, систему управления шасси, и отличается тем, что привод тяговых элементов выполнен электромеханическим, независимым и индивидуальным для каждого тягового элемента, и состоит из пары одинаковых моноблоков с электродвигателями, при этом в каждом моноблоке тяговый элемент, приводящий его во вращение электродвигатель и опорно-поддерживающее тело качения соосны, причем тяговый элемент и опорно-поддерживающее тело качения расположены оппозитно по отношению к электродвигателю, при этом оси тяговых элементов расположены вертикально при нижнем расположении тяговых элементов и верхнем расположении опорно-поддерживающих тел качения.
При этом для упрощения устройства, повышения его быстродействия и снижения шума при его работе упомянутые опорно-поддерживающие тела качения и тяговые элементы могут быть выполнены в виде роликов, установленных на упомянутых двух вертикальных осях с пружинным поджатием к внутренней поверхности сферической оболочки, обеспечивающим их упругое фрикционное сцепление с оболочкой.
Для облегчения возможности эксплуатации робота в условиях водной среды (обеспечение положительной плавучести и гидроизоляции внутреннего оборудования от забортной воды) и при наличии различных загрязняющих факторов - радиации, инородной атмосферы и т.д. сферическая оболочка может быть выполнена герметичной.
Покажем в заявляемом техническом решении причинно-следственную связь между отличительными признаками и достигаемым техническим результатом, а также необходимость и достаточность отличительных признаков для достижения этого результата.
Вначале рассмотрим общие для обоих конструктивных вариантов заявляемого устройства отличительные признаки.
Выполнение привода тяговых элементов электромеханическим обеспечивает компактность, бесшумность, низкий уровень вибраций, оптимальную адаптивность к электрическим источникам энергии, автоматическим, полуавтоматическим и дистанционно управляемым системам управления, что вносит вклад в повышение технико-эксплуатационных (тактико-технических) характеристик робота.
Выполнение привода тяговых элементов независимым и индивидуальным - условие и причина обеспечения весьма простого в практической реализации «бортового» способа управления поворотом шасси, что также влияет на повышение технико-эксплуатационных характеристик робота.
Выполнение привода тяговых элементов состоящим из пары моноблоков с соосностью тягового элемента и приводящего его во вращение электродвигателя обеспечивает простоту кинематической схемы и компактность конструкции изделия, удобство и оперативность монтажно-демонтажных работ, а также снижение шума и вибраций при работе привода(ов), и как результат - повышение технико-эксплуатационных (тактико-технических) характеристик шарообразного робота.
Выполнение пары упомянутых моноблоков одинаковыми реализует принцип унификации и взаимозаменяемости элементов устройства, что также приводит к упрощению устройства и снижению его стоимости.
Поясним влияние различий между двумя заявляемыми вариантами устройства на достигаемый технический результат при едином изобретательском замысле.
В первом варианте - опорно-поддерживающие тела качения установлены вверху шасси на их общей оси, которая расположена горизонтально и поперечно.
Это не только оптимизирует компоновку шасси и робота в целом, но и выгодно распределяет активные силы, моменты сил и их реакции в 3D-пространстве, а значит - повышает технико-эксплуатационные (тактико-технические) характеристики шарообразного робота.
В сочетании с дополнительным признаком «с возможностью регулировки высоты горизонтальной оси» и, соответственно, с возможностью регулирования высоты установки опорно-поддерживающих тел (роликов) в широких пределах с целью применения сменных оболочек разного диаметра (например, 240 и 300 мм) - отличает первый вариант от второго.
Во втором варианте - опорно-поддерживающее тело качения соосно тяговому элементу и электродвигателю; тяговый элемент и опорно-поддерживающее тело качения расположены оппозитно по отношению к электродвигателю; оси тяговых элементов расположены вертикально при верхнем расположении опорно-поддерживающих тел качения.
Соосность опорно-поддерживающего тела качения тяговому элементу и электродвигателю, в сочетании с расположением тягового элемента и опорно-поддерживающего тела качения (в отношении каждого из двух приводных блоков - левого и правого) оппозитно по отношению к электродвигателю, обуславливает, в отличие от первого варианта (что не умаляет достоинств и практической целесообразности использования первого варианта), лучшую балансировку привода маятникового типа, несколько большую конструктивную простоту рамы и монтажно-демонтажных работ.
Расположение осей тяговых элементов вертикально при верхнем расположении опорно-поддерживающих тел качения - неизбежная особенность второго конструктивного варианта, связанная с предыдущими двумя признаками (соосность опорно-поддерживающего тела качения тяговому элементу и электродвигателю, в сочетании с оппозитным расположением тягового элемента и опорно-поддерживающего тела качения).
Вместе с тем, обоими конструктивными вариантами решается общая поставленная задача и достигается, соответственно, общий технический результат, что дает основание говорить о едином изобретательском замысле.
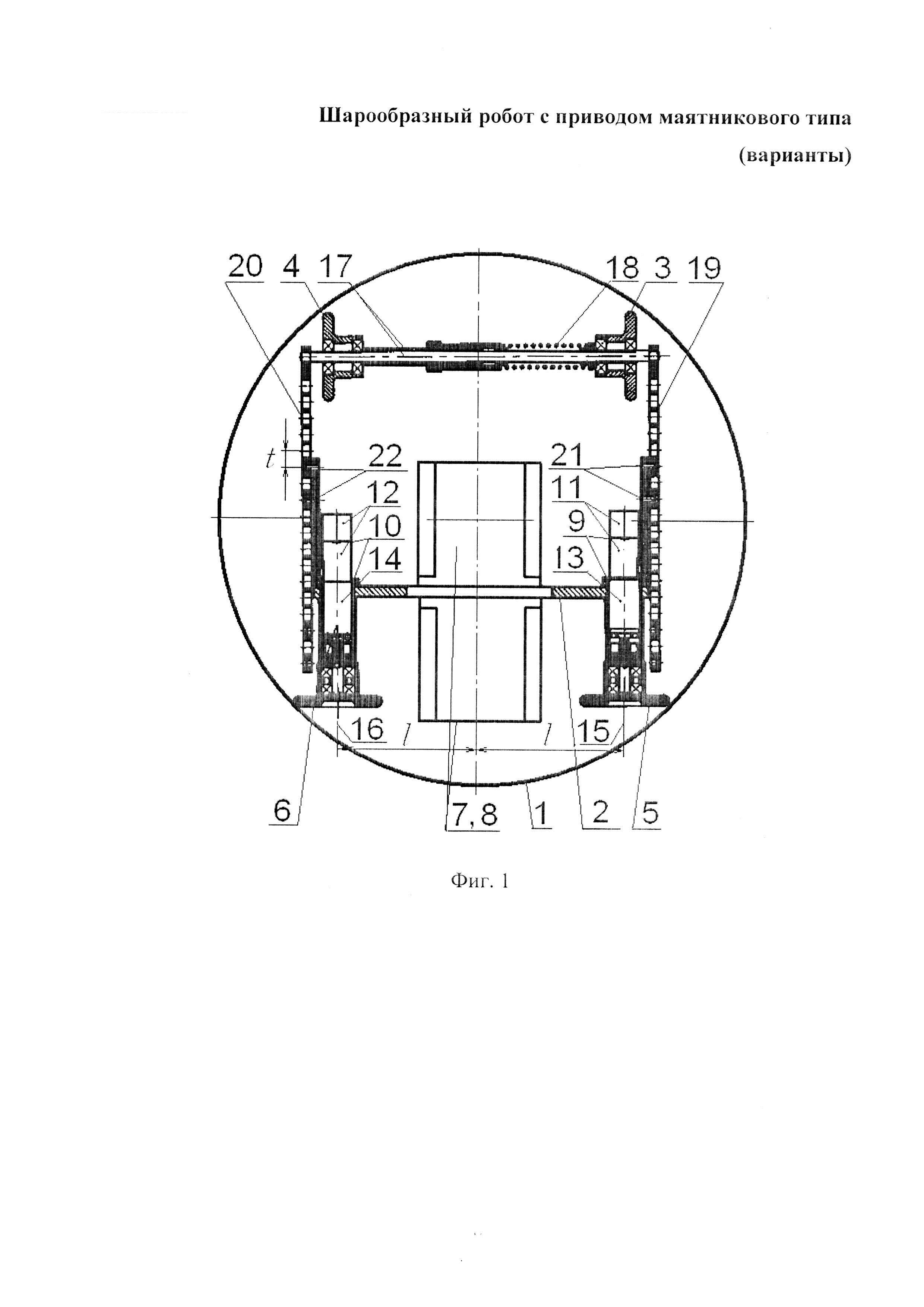
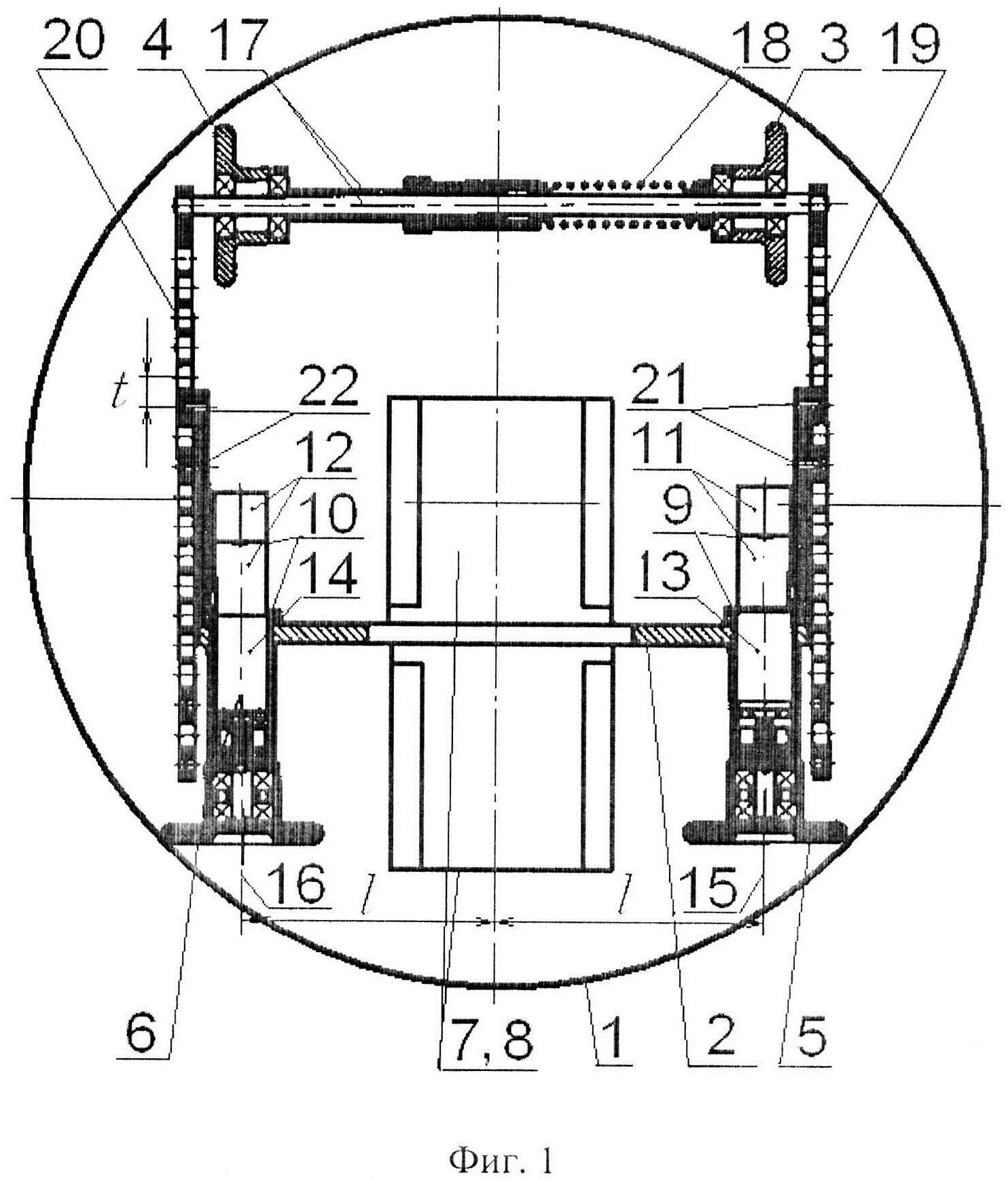
Заявляемые изобретения поясняются чертежами, где на фиг. 1 показано устройство по первому варианту, вид спереди в разрезе (сферическая оболочка условно показана окружностью), где l - смещение тяговых роликов от продольной вертикальной плоскости оболочки робота; t - шаг перестановки оси опорно-поддерживающих тел качения (роликов) по высоте;
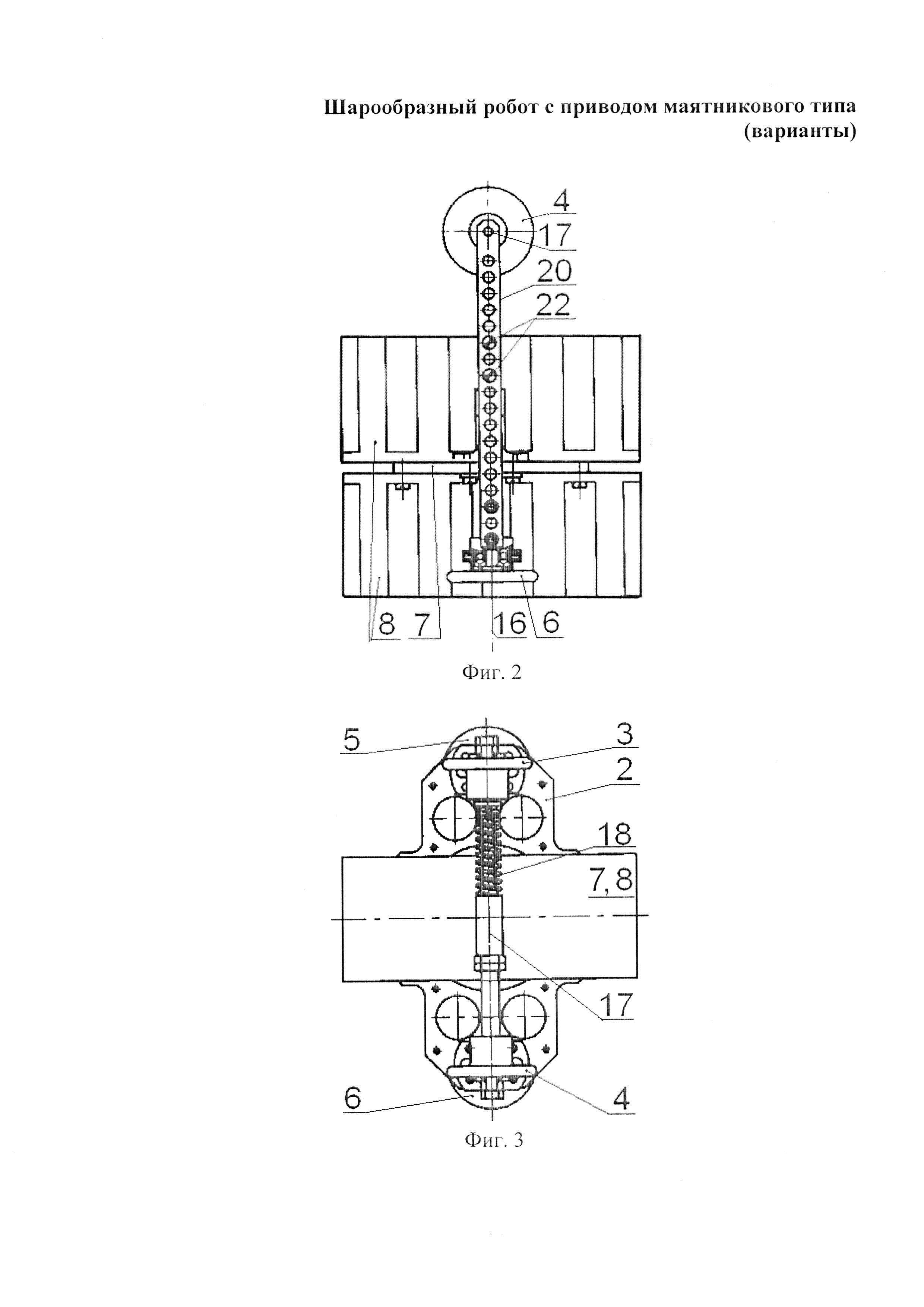
на фиг. 2 - вид сбоку устройства по первому варианту;
на фиг. 3 - вид сверху (в плане) устройства по первому варианту;
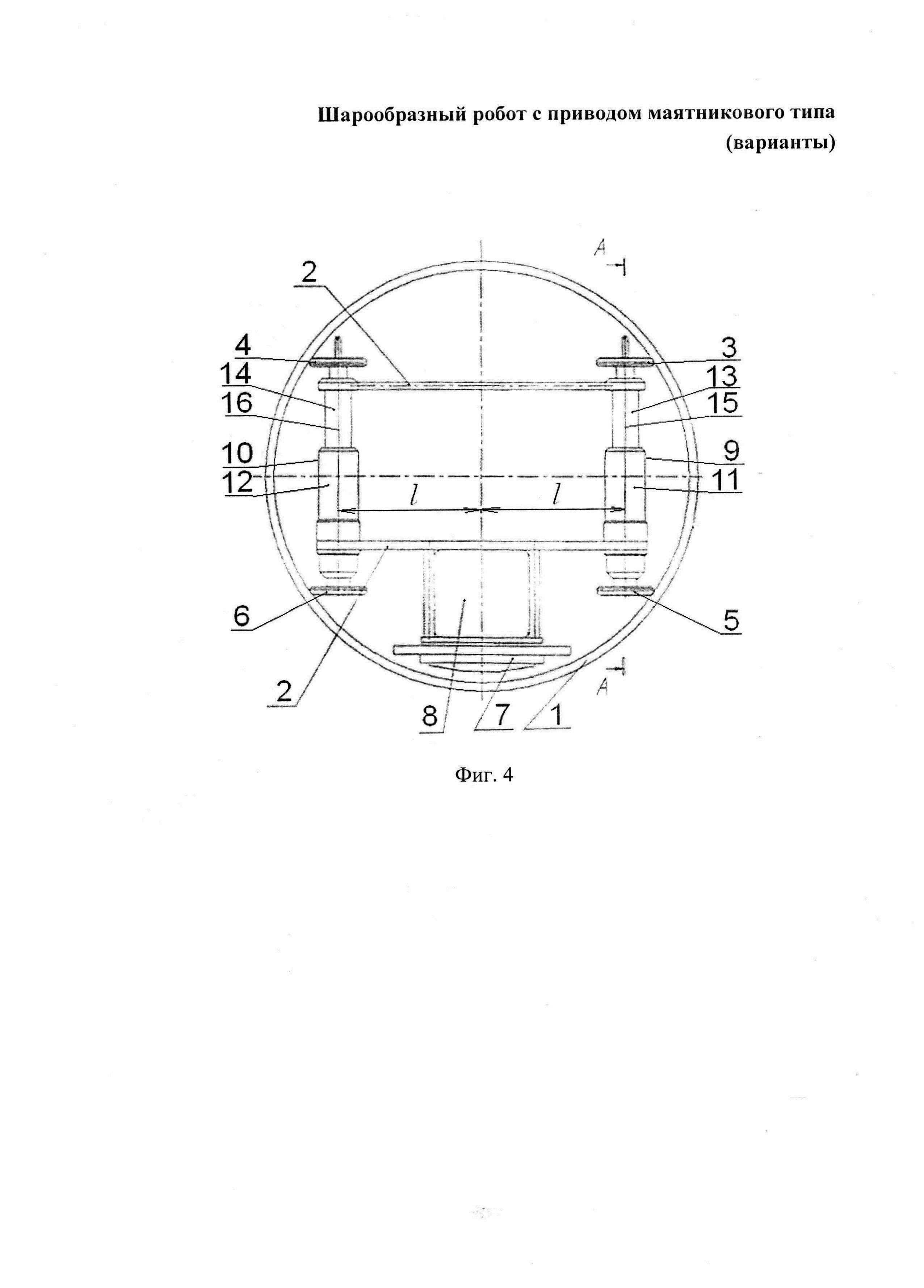
на фиг. 4 показано устройство по второму варианту, вид спереди в разрезе по сферической оболочке;
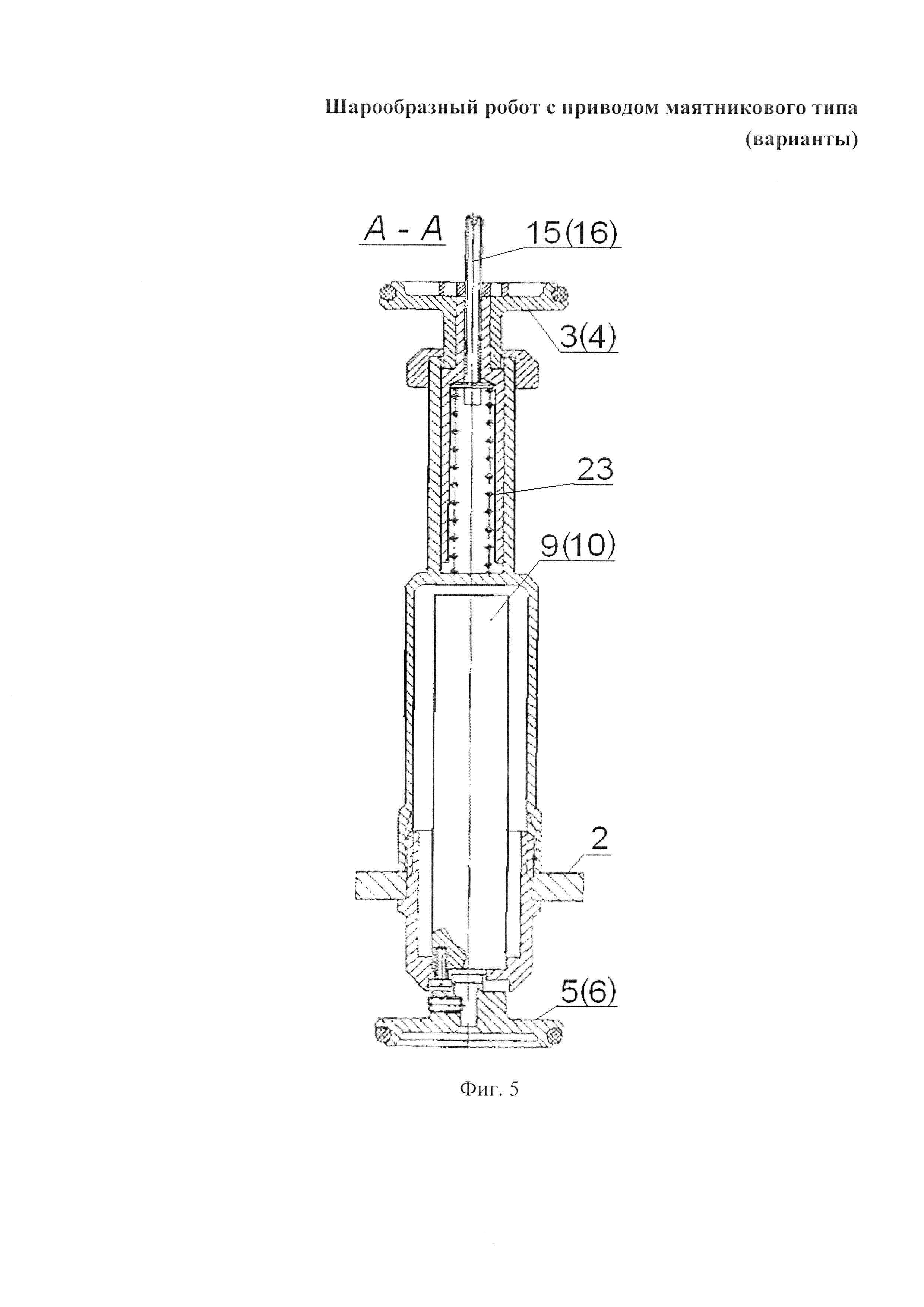
на фиг. 5 - разрез А-А на фиг. 4.
Шарообразный робот по первому варианту с приводом маятникового типа (см. фиг. 1-3) содержит самоходное шасси со сферической оболочкой 1 (см. фиг. 1, с условно нулевой толщиной, на фиг. 2, 3 не показана) и несущей рамой 2, размещенной в оболочке 1 посредством опорно-поддерживающих тел 3 и 4 качения. На раме 2 установлен движитель маятникового типа с использованием пары тяговых элементов 5, 6, разнесенных влево (правый элемент 5 на виде спереди - см. фиг. 1) и вправо (левый элемент 6 - см. там же) на одинаковые расстояния / (см. фиг. 1) от продольной вертикальной плоскости оболочки 1 и сцепленных с внутренней поверхностью оболочки 1.
В составе шасси робота имеются: дифференциальный реверсивный привод тяговых элементов 5, 6 (обеспечивающий возможность вращения элементов 5, 6 как с одинаковыми, так и неодинаковыми угловыми скоростями); противовес 7 для смещения центра масс робота; автономный источник 8 энергии (электроэнергии) (как правило, электрическая аккумуляторная батарея, при этом возможно совмещение функций батареи 8 и противовеса 7 в одном блоке - см. фиг. 1) и система управления шасси (размещена на верхней части рамы 2, не показана). Перечисленные составляющие шасси в совокупности обеспечивают омнимобильность шасси и робота в целом (то есть возможность перемещаться в любом направлении по азимуту с места, равно как и поворот или вращение на месте). Следует отметить: поскольку источник 8 и система управления призваны обслуживать не только шасси, но и «полезную нагрузку», то есть робота в целом, то в общем случае источник 8 и систему управления правильнее относить к роботу в целом.
Может быть предусмотрено и другое бортовое оборудование шасси и робота в целом: например, техническое зрение, солнечная батарея в качестве дополнительного источника энергии и т.д.
Привод тяговых элементов 5, 6 выполнен электромеханическим, индивидуальным и независимым для каждого из них и состоит из пары одинаковых моноблоков 9, 10 с электродвигателями 11, 12 (в общем случае - электродвигатели 11, 12 с редукторами 13, 14 соответственно), с соосностью (оси 15, 16 соответственно) каждого из тяговых элементов 5, 6 и приводящего его во вращение электродвигателя 11, 12 (через редуктор 13, 14 при их наличии). Иными словами, в моноблоке 9 ось электродвигателя 11, ось редуктора 13 (при его наличии) и ось тягового элемента 5 совпадают, сливаясь в одну общую продольную ось 15 моноблока 9. Аналогично: в моноблоке 10 ось электродвигателя 12, ось редуктора 14 (при его наличии) и ось тягового элемента 6 совпадают, сливаясь в одну общую продольную ось 16 моноблока 10.
Оси 15 и 16 расположены вертикально (как и показано на чертежах) при нижнем расположении тяговых элементов 5, 6.
Опорно-поддерживающие тела 3, 4 качения установлены, напротив, вверху шасси на их общей оси 17, которая расположена горизонтально и поперечно.
В частных случаях выполнения первый вариант устройства характеризуется следующими дополнительными конструктивными признаками.
Опорно-поддерживающие тела качения 3, 4 и тяговые элементы 5, 6 выполнены в виде роликов (с сохранением указанных позиций на чертежах и в описании), установленных, соответственно, на горизонтальной оси 17 и двух вертикальных осях 15, 16, с пружинным поджатием (пружина 18 - см. фиг. 1, 3) к внутренней поверхности сферической оболочки 1, обеспечивающим их (прежде всего роликов 5, 6) упругое фрикционное сцепление с оболочкой 1.
Горизонтальная ось 17 с опорно-поддерживающими телами качения (роликами) 3, 4 установлена с возможностью ступенчатой (на шаг t) регулировки по высоте, по меньшей мере, с двумя фиксированными положениями под сменные сферические оболочки 1 с двумя различными диаметрами, в частности, например, 240 и 300 мм соответственно. Практически это может быть реализовано, например, введением в конструкцию шасси перфорированных стоек 19, 20 (см. фиг. 1, 2), с организацией мест крепления оси 17 в точках 21 и 22 соответственно.
Сферическая оболочка 1 выполнена герметичной.
При герметичности оболочки 1, существенно облегчается обеспечение всем комплексом известных конструкторских мероприятий (подбор плотностей и объемов составных частей робота, плотности его компоновки и т.д.) положительной плавучести и гидроизоляции внутреннего оборудования робота в пресной или морской воде.
Выполнение робота с положительной плавучестью - предпочтительно.
Устройство по первому варианту работает следующим образом.
При подаче питания от источника 8 электроэнергии на электродвигатели 13, 14 тяговые ролики 5, 6 приводятся во вращение и за счет сцепления передают его сферической оболочке 1. Вследствие этого последняя начинает катиться по опорной поверхности (не показана). Направления и скорости вращения тяговых роликов 5, 6 определяют характер движения шасси и робота в целом.
Так, при вращении роликов 5 и 6 во встречном направлении с одинаковыми скоростями происходит прямолинейное движение робота вперед или назад, в зависимости от направления вращения.
Во всех остальных случаях происходит движение робота по криволинейной траектории с некоторым радиусом кривизны, который определяется направлениями и угловыми скоростями вращения тяговых роликов 5, 6.
Опорно-поддерживающие ролики 3, 4 выполняют функции в соответствии с их названием: с одной стороны, совместно с тяговыми роликами 5, 6 обеспечивают поддержку рамы 2 относительно сферической оболочки 1, а с другой стороны - во-первых, поджимают тяговые ролики 5, 6 к оболочке 1 и, во-вторых, компенсируют неровности оболочки 1.
Ось 17 может быть поднята вверх путем перестановки мест 21, 22 ее крепления на стойках 19, 20 в случае замены сферической оболочки на аналогичную большего диаметра (в данном примере - оболочку диаметром 240 мм на оболочку диаметром 300 мм), разумеется, с возможностью обратной операции.
Шарообразный робот по второму варианту с приводом маятникового типа (см. фиг. 4, 5) содержит самоходное шасси со сферической оболочкой 1 и несущей рамой 2, размещенной в оболочке 1 посредством опорно-поддерживающих тел качения 3, 4. На раме 2 установлен движитель маятникового типа с использованием пары тяговых элементов 5, 6, разнесенных влево (правый элемент 5 на виде спереди - см. фиг. 4) и вправо (левый элемент 6 - см. там же) на одинаковые расстояния / (см. фиг. 4) от продольной вертикальной плоскости оболочки 1 и сцепленных с внутренней поверхностью оболочки 1.
В составе шасси робота имеются: дифференциальный реверсивный привод тяговых элементов 5, 6 (обеспечивающий возможность вращения элементов 5, 6 как с одинаковыми, так и неодинаковыми угловыми скоростями); противовес 7 для смещения центра масс робота; автономный источник 8 энергии (как правило, электрическая аккумуляторная батарея) и система управления шасси (размещена на верхней части рамы 2, не показана). Перечисленные составляющие шасси в совокупности обеспечивают омнимобильность шасси и робота в целом (то есть возможность перемещаться в любом направлении по азимуту с места, равно как и поворот или вращение на месте).
Может быть предусмотрено и другое бортовое оборудование шасси и робота в целом: например, техническое зрение, солнечная батарея в качестве дополнительного источника энергии и т.д.
Привод тяговых элементов 5, 6 выполнен электромеханическим, индивидуальным и независимым для каждого тягового элемента 5, 6 и состоит из пары одинаковых моноблоков 9, 10 с электродвигателями 11, 12 (в общем случае - электродвигателями 11, 12 с редукторами 13, 14 соответственно), с соосностью (оси 15, 16 соответственно) каждого из тяговых элементов 5, 6, и приводящего их во вращение электродвигателей 11, 12 (через редукторы 13, 14) и опорно-поддерживающего тела 3, 4 качения. То есть каждый тяговый элемент 5, 6 и каждое опорно-поддерживающее тело 3, 4 качения расположены оппозитно по отношению к соответствующему электродвигателю 11 или 12 (с редуктором 13 или 14 при их наличии). При этом оси 15 и 16 расположены вертикально (как и показано на чертежах) при нижнем расположении тяговых элементов 5, 6.
В частных случаях выполнения второго варианта устройство характеризуется следующими дополнительными конструктивными признаками.
Опорно-поддерживающие тела качения 3, 4 и тяговые элементы 5, 6 выполнены в виде роликов (с сохранением указанных позиций на чертежах и в описании), установленных, на вертикальных осях 15, 16, с пружинным поджатием (пружина 23 - см. фиг. 5) к внутренней поверхности сферической оболочки 1, обеспечивающим их (прежде всего роликов 5, 6) упругое фрикционное сцепление с последней.
Сферическая оболочка 1 выполнена герметичной.
При герметичности оболочки 1 существенно облегчается обеспечение всем комплексом известных конструкторских мероприятий (подбор плотностей и объемов составных частей робота, плотности его компоновки и т.д.) положительной плавучести и гидроизоляции внутреннего оборудования робота в пресной или морской воде.
Выполнение робота с положительной плавучестью - предпочтительно.
При герметичности оболочки 1, робот обладает положительной плавучестью и гидроизоляцией внутреннего оборудования в пресной или морской воде.
Заявленный второй вариант устройства работает аналогично первому варианту. Отличие заключается в ином распределении составляющих сил реакции на роликах 3, 4, что обусловлено иной их ориентацией.
Выбор конкретного варианта из предложенных при использовании изобретения зависит от спектра тактико-технических и экономических требований и производится в каждом конкретном случае.
Ниже приведены примеры выполнения основных элементов (покупных изделий) по первому и второму вариантам заявляемого устройства (эти элементы одинаковы для обоих вариантов, а отличие второго варианта от первого заключается не в использовании каких-либо других покупных изделий, а в оригинальных элементах и их взаимном расположении, т.е. компоновке).
В составе силовых приводов могут быть использованы сборки Maxon (см. Каталог фирмы Maxon 2011-2012 гг., с. 134, 227, 262), в которые входят: двигатель RE-max 29 (226802); редуктор GP26B (144026 или 144037); Энкодер MR (225773).
Автономный источник энергии может быть выполнен на базе аккумулятора DJW12-2.3 (12V2. 3АН) LEOCH ВATTERY СО, LTD.
Способ защиты сервера услуг от ddos атак
Способ передачи дискретных сигналов в режиме программной перестройки рабочей частоты с изменяемыми параметрами модуляции
Способ формирования сигнала с программной перестройкой рабочей частоты с изменяемыми параметрами
Устройство для определения параметров движения цели
Защитное устройство бронированного военного объекта
Двухпоточная трансмиссия транспортной машины с бортовым способом поворота
Автономный электрифицированный рекламный щит
Калиберный снаряд боеприпаса к оружию с кривым стволом
Автономный электрифицированный рекламный комплекс
Трансформируемое ведущее колесо безэкипажного транспортного средства
Многопозиционная система посадки воздушных судов
Кривоствольный дисковый револьвер
Наземный транспортный комплекс

