Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНТОМ БУКСИРУЕМОГО ПОДВОДНОГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области подводного судостроения, в частности к способам и системам управления дифферентом подводных устройств, и может быть использовано для ориентации по дифференту буксируемых подводных объектов.
В настоящее время в связи с увеличением интереса к проведению океанологических исследований и освоения Мирового океана растет число подводных объектов (ПО) - зонды, аппараты, тралы и т.д.
Известны Подводные объекты, связанные с судном - носителем с помощью гибкой механической связи: тросом или кабель - тросом, буксируемые по его траектории, с возможностью маневрирования в вертикальной и/или горизонтальной плоскости. Существуют ПО с управляемыми перемещениями, которые возможны только при наличии в составе ПО движителей или рулей.
Известны буксируемые ПО с отрицательной плавучестью, глубина погружения у которых регулируется длиной гибкой связи (троса), а стабилизация по дифференту определяется обводами корпуса ПО, местами крепления троса, положением крыла и/или рулей. Траектория движения ПО по глубине и ориентация по рысканью и дифференту зависит от скорости буксировки, подводных течений и воздействия волнения на буксирующее судно.
Известны два варианта крепления троса к ПО: за носовую часть либо за верхнюю часть.
Известно «Буксируемое подводное устройство с горизонтальной стабилизацией» (патент RU №2148033, В63В 21/66, опубл. 27.04.2000, Бюл. №12), с вариантом крепления за носовую часть и реализующее способ стабилизации по дифференту, заключающийся в том, что в носовой и хвостовой части расположены разгружающие поплавки, а на тросе отягощающие грузы, компенсирующие выталкивающие силы поплавков.
Недостатком такого способа стабилизации является то, что внутреннее пространство ПО загромождается поплавками, кроме того, для разных режимов буксировки требуется различное количество и вес грузов, поэтому необходимо извлекать ПО при перенастройке на другой режим, что делает этот процесс трудоемким, снижающим эффективность такого способа горизонтальной стабилизации.
Известен также «Подводный буксируемый аппарат» (патент RU №2096245, В63В 21/66, опубл. от 14.06.1990), реализующий вариант закрепления троса в верхней части корпуса и способ стабилизации по дифференту, заключающийся том, что в верхней носовой и кормовой части имеются лопасти, выполненные в виде крыла малого удлинения, причем носовые лопасти устанавливают с положительным углом атаки, а кормовые - с отрицательным. Выравнивание по дифференту происходит за счет гидродинамических сил.
Недостатком этого технического решения является то, что углы атаки настраиваются на ограниченный диапазон скоростей, кроме того, для перенастройки на другой диапазон требуется извлечение ПО, что также повышает трудоемкость и, следовательно, снижает эффективность такого способа стабилизации по дифференту.
Наиболее близким по технической сущности к заявленному техническому решению и взятому в качестве прототипа является «Подводный буксируемый аппарат» (патент RU №2096246, В63В 21/6, опубл. 20.11.1997), реализующий способ стабилизации по дифференту, заключающийся в том, что трос закрепляют в верхней части ПО, и выравнивание по дифференту при изменении скорости судна выполняют за счет гидродинамических сил, создаваемых горизонтальными интерцепторами, расположенными в кормовой части.
Основным недостатком такого способа является ограниченный диапазон скоростей, в котором буксируемый ПО будет находиться в горизонтальном положении, обусловленном горизонтальными интерцепторами, которые располагают в кормовой части. Кроме того, при значительном увеличении скорости буксировки, для компенсации кабрирующего момента Мz требуется увеличение площади интерцепторов, из-за чего будет увеличиваться гидродинамическое сопротивление, приводя к потери энергии на преодоление этого сопротивления, снижающей эффективность способа.
Решаемой задачей заявляемого технического решения является расширение диапазона скоростей буксировки, снижение гидродинамичекого сопротивления, без потерь энергии и повышении устойчивости горизонтального положения ПО, а в целом повышающие эффективность способа управления дифферентом ПО.
Техническим результатом от использования заявляемого изобретения является создание высокоэффективного способа управления дифферентом буксируемого ПО, позволяющего повысить управляемость по дифференту в большом диапазоне скоростей, без увеличения гидродинамического сопротивления.
Технический результат достигается тем, что в способе управления дифферентом буксируемого подводного объекта, заключающемся в расположении узла крепления гибкой связи в верхней части подводного объекта, в выравнивании положения гидродинамическими силами путем компенсирования изменения кабрирующего момента при изменении скорости буксировки, согласно которому для выравнивания положения подводного объекта в носовой части буксируемого подводного объекта горизонтально располагают вал с заданной площадью, с возможностью изменения угловой скорости вращения в зависимости от скорости буксировки, при этом в погруженном состоянии осуществляют компенсирование изменений кабрирующего момента при изменении скорости буксировки, с помощью гидродинамических сил, возникающих при обтекании вращающегося вала и направленных перпендикулярно к потоку жидкости, которые направляют в сторону, противоположную направлению кабрирующего момента, а угловую скорость вращения вала изменяют в соответствии с изменением скорости буксировки.
Новым является.
В носовой части буксируемого подводного объекта с узлом крепления гибкой связи, расположенном в верхней части, располагают горизонтально вращающийся вал. Для выравнивания положения ПО по дифференту в большом диапазоне скоростей буксировки, площадь и угловую скорость вращения вала подбирают таким образом, чтобы компенсировать изменения кабрирующего момента при изменении скорости буксировки, для чего изменяют угловую скорость вращения вала, повышая управляемость дифферентом, тем самым получив высокоэффективный способ управления дифферентом буксируемого ПО.
Новое техническое решение основано на решении задачи управления дифферентом с возможностью использования известного физического явления, возникающего при обтекании вращающегося тела потоком жидкости или газа - возникновение силы, воздействующей на вращающееся тело и направленной перпендикулярно направлению потока (эффект Магнуса).
В эффекте Магнуса взаимосвязаны: направление и скорость потока, направление и угловая скорость, направление и возникающая сила. Эта зависимость для цилиндра имеет следующий вид (формула Жуковского-Кутта):

где:  - интенсивность движения вокруг цилиндра;
- интенсивность движения вокруг цилиндра;
где:
Sв - площадь цилиндра;
ω - угловая скорость вращения цилиндра;
ρ - плотность жидкости;
V - относительная скорость потока.
Сущность предлагаемого технического решения поясняется чертежом, приведенным на фиг. 1, где:
1 - подводный объект;
2 - вращающийся вал;
3 - узел крепления с буксирующим тросом.
В носовой части подводного объекта 1 горизонтально установлен вращающийся цилиндр (вал 2). При буксировке на незначительных скоростях горизонтальное положение ПО устанавливается за счет того, что точка закрепления А буксирующего троса 3 располагается на одной вертикали с центром отрицательной плавучести (точка О) (т.е. центром приложения равнодействующей силы веса G и водоизмещения) и над ним. При увеличении скорости растет кабрирующий момент Μz, стремящийся опустить носовую часть ПО. В то же время с увеличением скорости буксировки возрастает сила Fм, поднимающая носовую часть. При заданном соотношении площади вала, угловой скорости вращения вала, сила Fм уравновесит кабрирующий момент Mz и позволит сохранить подводному объекту горизонтальное положение (по дифференту). При значительном увеличении скорости буксировки для выравнивания ПО по дифференту, для увеличения силы F1, компенсирующей момент Mz, увеличивают угловую скорость вала.
Способ управления дифферентом буксируемого подводного объекта реализуют следующим образом.
Подводный объект 1 в верхней части 3 над центром отрицательной плавучести закрепляют за ходовой конец троса; в носовой части горизонтально располагают вал 2, который имеет возможность изменения угловой скорости вращения в определенной зависимости от изменения скорости буксировки, в некотором диапазоне, зависящем от площади вала (заданного) и диапазона скорости буксировки ПО. Подводный объект погружают на рабочую глубину, при этом при буксировке ПО на него действует кабрирующий момент, возникающий от гидродинамической силы, направленный вдоль вектора скорости тела, перпендикулярно к потоку жидкости, в противоположном ему направлении. Сила зависит от скорости буксировки ПО и стремится опустить носовую часть вниз, причем при увеличении скорости буксировки сила возрастает. Для выравнивания положения ПО осуществляют компенсирование изменений кабрирующего момента, для чего изменяют угловую скорость вращения вала 2 в известной зависимости от изменения скорости буксировки ПО, при этом возникает сила, перпендикулярная потоку и направленная в сторону, противоположную кабрирующему моменту. Происходит компенсация кабрирующего момента моментом от гидродинамических сил и ПО принимает горизонтальное положение за счет того, что центр отрицательной плавучести находится под точкой закрепления буксирующего троса, все это позволяет повысить управляемость по дифференту в большом диапазоне скоростей, без увеличения гидродинамического сопротивления, тем самым сделав способ управления по дифференту буксируемого подводного объекта высокоэффективным.
Пример выполнения ориентации буксируемого ПО дифференту для ПО с размерами 1×1×1 м. Гидродинамическая сила, определяющая кабрирующий момент будет изменяться по зависимости:

где: Сх - коэффициент лобового сопротивления;
V2 - скорость потока жидкости;
Sм - площадь сечения по миделю.
Тогда кабрирующий момент в случае закрепления троса в средней верхней части ПО (с плечом h1=0,5 м) будет равен:

Для компенсации Мz по середине носовой части располагают вал с приводом от электродвигателя с возможностью регулирования оборотов. Пусть вал имеет размеры: длина радиус rв=0,1 м, тогда его площадь
радиус rв=0,1 м, тогда его площадь
Момент от силы Магнуса в случае установки вала в средней части (с плечом будет:
будет:
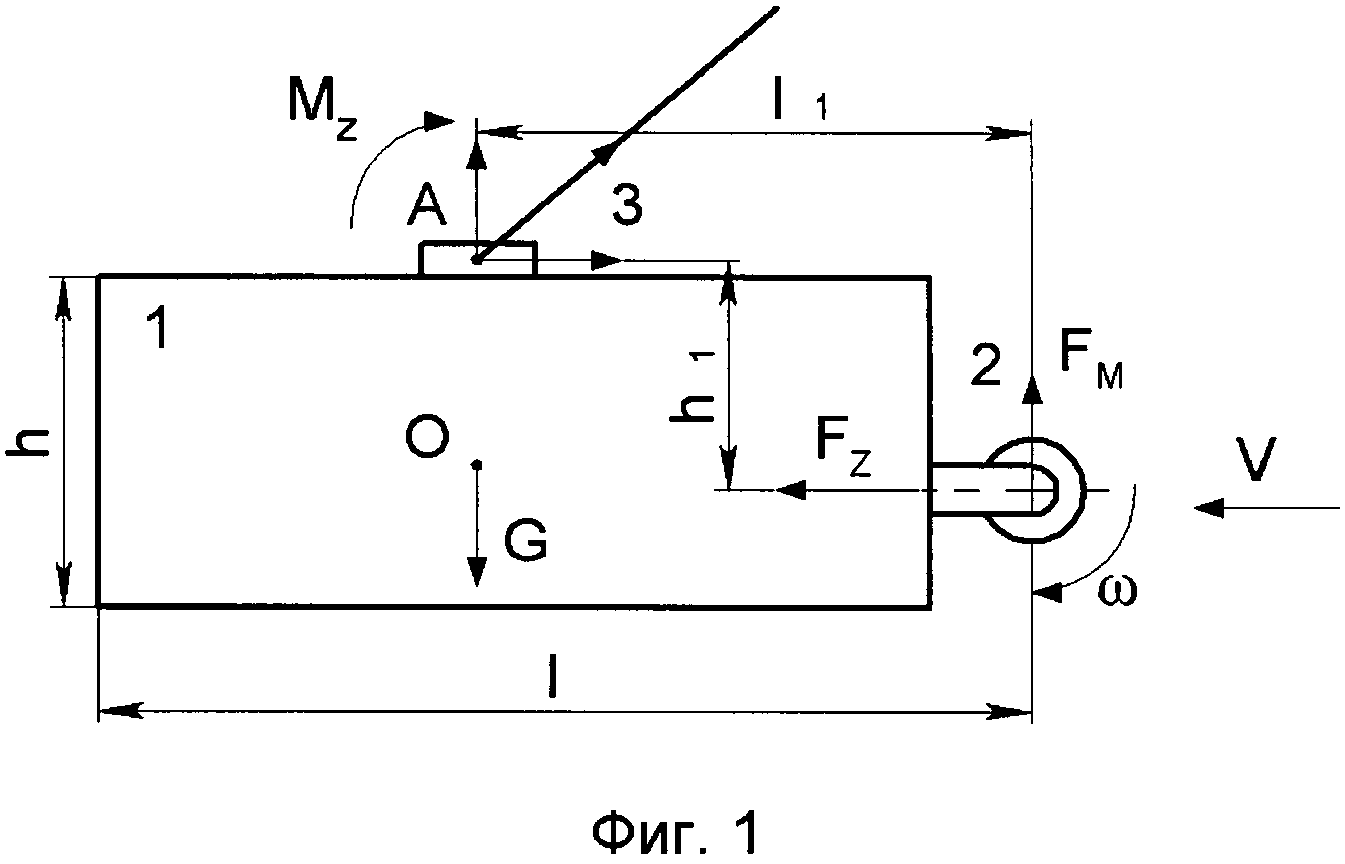
Угловую скорость вала ω необходимую для поддержания горизонтального положения ПО (компенсации кабрирующего момента) определяют из равенства Мм=Mz, то есть  или при Sм=1
или при Sм=1  .
.
Зависимость  для приведенного в примере ПО при Сх=1,5 приведена на фиг. 2.
для приведенного в примере ПО при Сх=1,5 приведена на фиг. 2.
В результате имеется возможность управления дифферентом буксируемого ПО с узлом троса в верхней части в неограниченном диапазоне скоростей буксировки, без увеличения гидродинамического сопротивления, т.к. изменение положения буксируемого ПО по дифференту происходит только в результате изменения угловой скорости вала. Кроме того, появляется возможность оперативного воздействия на дифферент буксируемого ПО.
По своим технико-экономическим преимуществам, по сравнению с известными аналогами, заявляемое техническое решение способа позволяет управлять дифферентом подводного объекта в большом диапазоне скоростей буксировки и без извлечения ПО для перенастройки, в результате выравнивания положения ПО, за счет компенсирования изменений кабрирующего момента при изменении скорости буксировки, путем подбора заданной площади и изменения угловой скорости вращения вала в соответствии с изменением скорости буксировки, что обеспечивает высокую эффективность «Способа управления дифферентом буксируемого подводного объекта».
Способ управления дифферентом буксируемого подводного объекта, заключающийся в расположении узла крепления гибкой связи в верхней части подводного объекта, в выравнивании положения гидродинамическими силами путем компенсирования изменения кабрирующего момента при изменении скорости буксировки, отличающийся тем, что для выравнивания положения подводного объекта в носовой части буксируемого подводного объекта горизонтально располагают вал с заданной площадью с возможностью изменения угловой скорости вращения в зависимости от скорости буксировки, при этом в погруженном состоянии осуществляют компенсирование изменений кабрирующего момента при изменении скорости буксировки с помощью гидродинамических сил, возникающих при обтекании вращающегося вала и направленных перпендикулярно к потоку жидкости, которые направляют в сторону, противоположную направлению кабрирующего момента, а угловую скорость вращения вала изменяют в соответствии с изменением скорости буксировки.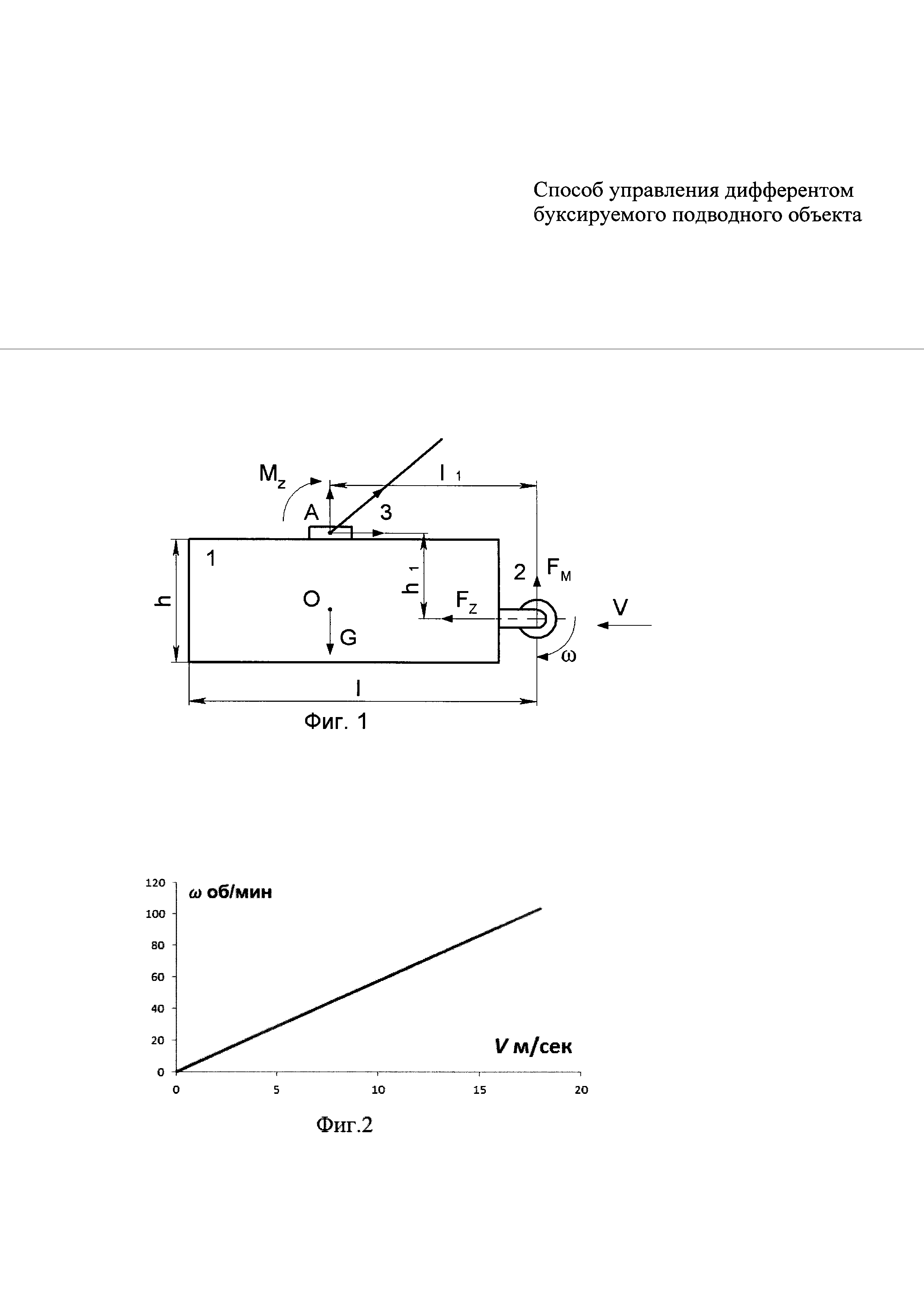
Способ получения изделий сложной формы на основе углеродных синтактных пеноматериалов и установка для осуществления способа
Активный фильтр высших гармоник токов трехфазной сети
Устройство для счета ионов
Инжекционный смеситель горелки
Теплообменная поверхность
Способ сверхзвуковой лазерной наплавки порошковых материалов и устройство его реализующее
Элемент охлаждения лопатки турбомашины
Способ соединения металлического материала с композиционным материалом лазерным лучом
Способ лазерного выращивания изделий из металлической проволоки
Способ стабилизации зоны горения в форсажной камере сгорания турбореактивного двигателя и форсажная камера сгорания турбореактивного двигателя
Катализатор и способ его получения
Способ управления рысканьем буксируемого подводного объекта

