Результат интеллектуальной деятельности: Способ приема и передачи топопривязчиком дифференциальных поправок
Вид РИД
Изобретение
Изобретение относится к области навигации и топопривязки, в частности к способам спутниковой навигации и контроля качества навигационных полей космических навигационных систем ГЛОНАСС и GPS, формирования корректирующей информации и анализа ее качества.
Известен способ функционирования топопривязчика в режиме контрольно-корректирующей станции (см. патент RU №2488223 С1, опубл. 20.07.13 г.), принятый за прототип. Способ функционирования топопривязчика в режиме контрольно-корректирующей станции включает прием спутниковой навигационной информации, проведение коррекции навигационной информации, поступающей от навигационных космических аппаратов, выполняемой в режиме контрольно-корректирующей станции (ККС), имеющей собственное программно-математическое обеспечение, выдачу выходных параметров навигации и корректирующей информации по сигналам навигационных космических аппаратов внешним потребителям по автономному каналу передачи данных. При аппаратной реализации, когда рабочая конфигурация ККС состоит из следующих основных аппаратных блоков: опорной станции (ОС) с устройством для передачи дифференциальных поправок, контрольной станции (КС), станции интегрального контроля (СИК) с устройством для приема дифференциальных поправок, на первом этапе выполняется контроль работоспособности ККС, на втором этапе выполняется прием аппаратурой ОС и СИК сигналов всех находящихся в зоне видимости КА КНС ГЛОНАСС и GPS, включающий запрос с ОС альманахов КНС ГЛОНАСС и GPS, запрос плановых координат и высоты точки размещения антенн ОС и СИК, расчета видимости КА КНС ГЛОНАСС и GPS на текущую дату, сравнения количества отслеживаемых приемниками ОС и СИК КА КНС ГЛОНАСС и GPS с расчетным числом КА, на третьем этапе выполняется измерение псевдодальностей и фазы несущей по всем принимаемым сигналам КНС ГЛОНАСС и GPS, временная привязка измерений к системной шкале КНС ГЛОНАСС (GPS), их регистрация с заданным темпом и выдача в реальном времени или по требованию оператора на устройстве отображения, формирование из принимаемых навигационных сообщений КА файлов, их регистрация и выдача для архивации, хранения и представления в текстовом виде, на четвертом этапе происходит получение и формирование корректирующей информации для навигационных сигналов КА ГЛОНАСС и GPS, непрерывный анализ качества рассчитанной и передаваемой корректирующей информации, выдача корректирующей информации в реальном масштабе времени в устройство для передачи дифференциальных поправок в канал передачи корректирующей информации, на пятом этапе происходит определение координат ККС в режиме накопления с постобработкой данных.
Недостатком прототипа является отсутствие четкого алгоритма функционирования базовой контрольно-корректирующей станции с различными потребителями корректирующей информации, входящими в единую автоматизированную систему управления войсками.
Предлагаемым изобретением решается задача по повышению точности и эффективности наземных систем инерциально-спутниковой навигации.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа приема и передачи топопривязчиком дифференциальных поправок, обеспечивающего реализацию алгоритма приема и передачи дифференциальных поправок всем возможным потребителям, находящимся в единой информационной сети с топопривязчиком, по их запросу через единый закрытый канал связи, что позволяет повысить точность средств космической навигации, используемых всеми потребителями сигналов космической навигационной системы ГЛОНАСС и GPS в позиционном районе.
Указанный технический результат достигается тем, что в предлагаемом способе приема и передачи топопривязчиком дифференциальных поправок, включающем контроль работоспособности, прием аппаратурой сигналов спутниковых навигационных систем ГЛОНАСС и GPS, получение и формирование корректирующей информации, непрерывный анализ качества рассчитанной и передаваемой корректирующей информации, выдачу корректирующей информации в устройство для передачи дифференциальных поправок, новым является то, что передача и прием топопривязчиком дифференциальных поправок происходит следующим образом: топопривязчик выставляется на точке с известными координатами X, Y и высотой H, запускаются программно-аппаратный комплекс и устройство приема и обработки информации базовой контрольно-корректирующей станции, включается и настраивается на необходимую частоту радиостанция, проводится настройка базовой контрольно-корректирующей станции, для чего последовательно на элементах опорной станции и станции интегрального контроля выбирается пункт меню «Инициализация», во вкладке «Координаты» в рабочем поле «Общее и координаты GPS» вводятся координаты текущего местоположения и нажимается кнопка «Пересчитать для ГЛОНАСС», а в поле «Используемые параметры пересчета координат» нажимается кнопка «Заполнить», после загрузки бортового компьютера программно-аппаратного комплекса в меню выбирается режим «Настройка АПД», где поля адреса аппаратуры передачи данных, адреса и подписи должны быть заполнены, в окне «Навигация» вводятся координаты и высота нахождения топопривязчика, далее необходимо перейти в окно «Связь» и контролировать информацию от базовой контрольно-корректирующей станции - количество поправок от спутниковых навигационных систем ГЛОНАСС и GPS, а выдача поправок потребителям происходит автоматически по их запросу, для потребителя необходимо ввести адрес запроса ХХХХХХ, где последние две цифры в поле адреса запроса соответствуют порядковому номеру топопривязчика, с которого происходит передача дифференциальных поправок, нажать кнопку «Запросить», проконтролировать в окне режима «Состояние», что аппаратура спутниковой навигации перешла в режим работы с коррекцией.
Размещение топопривязчика при передаче и приеме дифференциальных поправок на точке с известными координатами X, Y и высотой H позволяет:
- инициировать процесс определения дифференциальных поправок;
- оценить точность определения дифференциальных поправок.
Запуск аппаратных средств программно- аппаратного комплекса, базовой контрольно-корректирующей станции и средств связи позволяет:
- привести в действие программно-аппаратное обеспечение процесса контроля качества навигационных полей ГЛОНАСС и GPS, формирования корректирующей информации и анализа ее качества;
- реализовать полный алгоритм приема и передачи дифференциальных поправок.
Проведение настройки базовой контрольно-корректирующей станции позволяет:
- установить начальные условия для проведения измерений;
- установить формат используемых файлов альманахов геодезических данных.
Выбор режима «Настройка АПД» позволяет настроить параметры обмена: ввести адрес аппаратуры передачи данных, адрес и подпись на сопрягаемый объект.
Переход в окно «Связь» позволяет:
- подготовиться к передаче дифференциальных поправок потребителю по закрытому каналу связи;
- контролировать наличие и качество информации, поступающей от базовой контрольно-корректирующей станции.
Реализация автоматической выдачи поправок потребителям по их запросу позволяет:
- перевести работу аппаратуры спутниковой навигации потребителя в режим работы с коррекцией;
- обеспечить автоматическое сохранение, а при необходимости документирование полученных данных.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
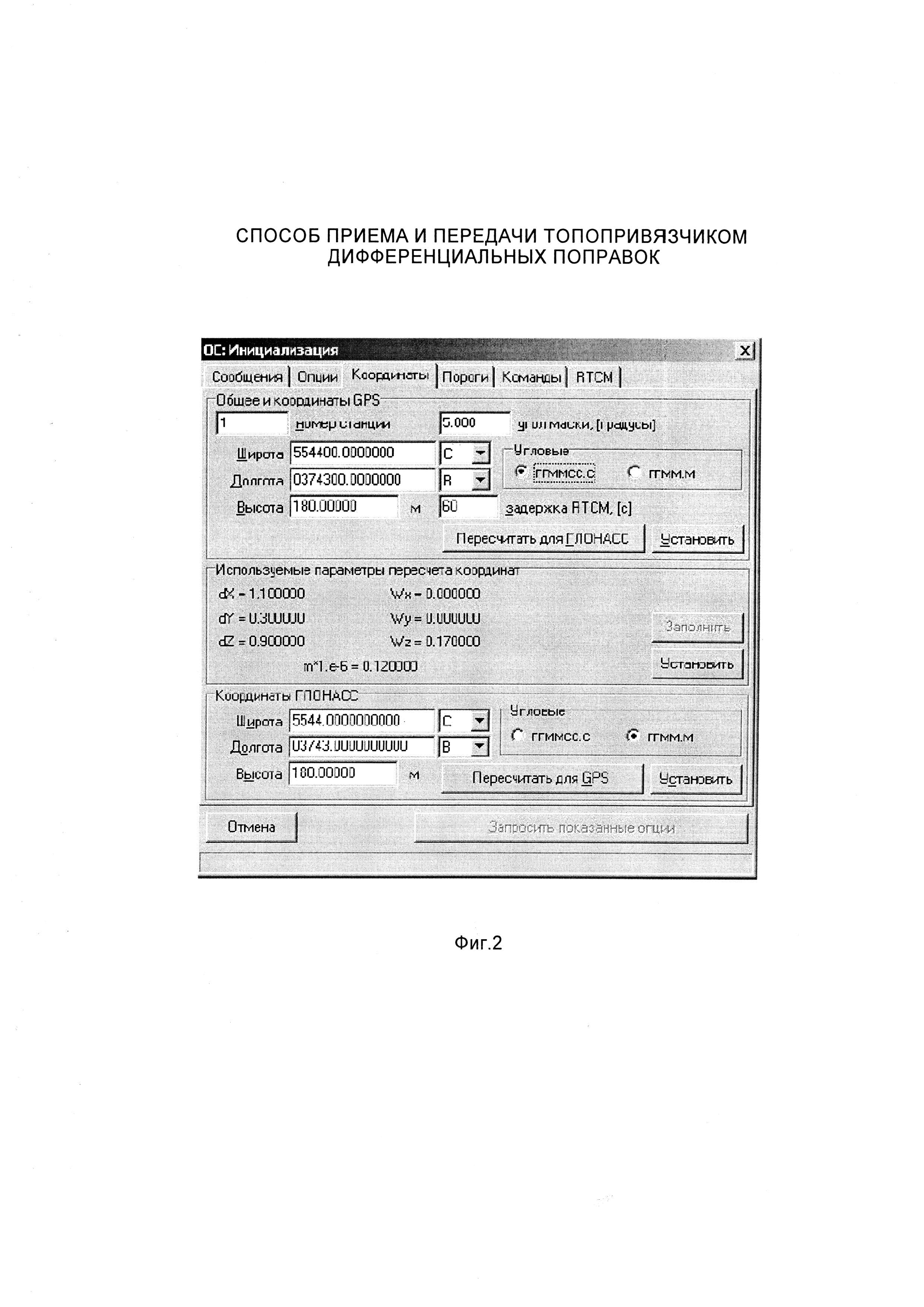
Сущность изобретения поясняется чертежами, где на фиг. 1 показана структурная схема базовой контрольно-корректирующей станции; на фиг. 2 - рабочее окно пункта меню «Инициализация»; на фиг. 3 - рабочее окно режима «Настройка АПД»; на фиг. 4 - рабочее окно режима «Связь»; на фиг. 5 - рабочее окно режима «Состояние».
Отличительной особенностью топопривязчика от аналогов является возможность работы в режиме базовой контрольно-корректирующей станции (БККС), что на порядок повышает точность средств космической навигации, используемых всеми потребителями сигналов космических навигационных систем ГЛОНАСС и GPS в позиционном районе путем формирования и выдачи им дифференциальных поправок. В топопривязчике реализована передача дифференциальных поправок всем возможным потребителям, находящимся в единой информационной сети с топопривязчиком, по их запросу через единый закрытый канал связи. Это позволяет потребителям в зоне ответственности общевойскового соединения всеми объектами, оснащенными спутниковыми навигационными системами, определять координаты и высоту с погрешностью менее 1 метра в режиме реального времени. Потребителями топогеодезической информации от топопривязчика являются объекты, должностные лица которых организуют топогеодезическое обеспечение боевых действий формирований РВ и А и управляют работой топогеодезических подразделений.
Главной составной частью базовой контрольно-корректирующей станции, реализующей функциональные возможности, является устройство приема и обработки информации, которое представляет собой мобильный усиленный компьютер (типа «Ноутбук»).
Рабочая конфигурация БККС станции состоит из следующих основных аппаратных блоков, объединенных в едином модуле: опорной станции (ОС) 1 с устройством для передачи дифференциальных поправок, контрольной станции (КС) 2, станции интегрального контроля (СИК) 3 с устройством для приема дифференциальных поправок. ОС 1 связана с антенным модулем (AM) 4, СИК 3 - с AM 5. КС 2 связана с аппаратурой передачи данных (АПД) 6. КС 2 - это оборудование и программно-вычислительное средство, входящее в состав БККС. КС 3 предназначается для оперативного контроля состояния и управления функционированием комплекса аппаратных средств и программных функций БККС с заданными характеристиками. ОС 1 представляет собой навигационный приемник, предназначенный для выработки дифференциальных поправок к измерениям, а так же формирования и передачи сформированных сообщений. СИК 3 представляет собой навигационный приемник, предназначенный для непрерывного контроля качества корректирующей информации, вырабатываемой ОС 1. СИК 3 принимает поправки и проверяет их нахождение в допустимых пределах. СИК 3 постоянно обеспечивает обратную связь с ОС 1.
Способ приема и передачи топопривязчиком дифференциальных поправок реализуется в соответствии со следующим алгоритмом. Топопривязчик выставляется на точке с известными координатами X, Y и высотой H, включается система электроснабжения топопривязчика, запускаются программно-аппаратный комплекс и устройство приема и обработки информации базовой контрольно-корректирующей станции, включается и настраивается на необходимую частоту бортовая радиостанция. Настройка базовой контрольно-корректирующей станции проводится в следующей последовательности:
- последовательно вызывается меню на элементах ОС 1 и СИК 3, выбирается пункт меню «Инициализация»;
- во вкладке «Координаты» в рабочем поле «Общее и координаты GPS» вводятся координаты текущего местоположения топопривязчика в системе координат WGS-84 в выбранной форме и нажимается кнопка «Пересчитать для ГЛОНАСС»;
- в поле «Используемые параметры пересчета координат» нажимается кнопка «Заполнить».
После загрузки бортового компьютера программно-аппаратного комплекса в меню выбирается режим «Настройка АПД», где поля адреса аппаратуры передачи данных, адреса и подписи должны быть заполнены. В окне «Навигация» вводятся координаты и высота нахождения топопривязчика, далее необходимо перейти в окно «Связь» и через 10-15 мин. контролировать информацию от базовой контрольно-корректирующей станции - количество поправок от спутниковых навигационных систем ГЛОНАСС и GPS в рабочем поле «Информация от ККС». Для приема потребителем (сам топопривязчик тоже является потребителем) дифференциальных поправок производится остановка объекта, включается аппаратура спутниковой навигации, радиостанция настраивается на необходимую частоту. Далее вводится адрес запроса ХХХХХХ, где последние две цифры в поле адреса запроса соответствуют порядковому номеру топопривязчика, с которого происходит передача дифференциальных поправок, нажимается кнопка «Запросить». В окне «Состояние» контролируется то, что АСН перешла в режим работы с коррекцией (время актуальности дифференциальных поправок 120 с).
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании способа приема и передачи топопривязчиком дифференциальных поправок и обеспечивающего реализацию алгоритма приема и передачи дифференциальных поправок всем возможным потребителям, находящимся в единой информационной сети с топопривязчиком, по их запросу через единый закрытый канал связи, что позволяет повысить точность средств космической навигации, используемых всеми потребителями сигналов космической навигационной системы ГЛОНАСС и GPS в позиционном районе.
Способ приема и передачи топопривязчиком дифференциальных поправок, включающий контроль работоспособности, прием аппаратурой сигналов спутниковых навигационных систем ГЛОНАСС и GPS, получение и формирование корректирующей информации, непрерывный анализ качества рассчитанной и передаваемой корректирующей информации, выдачу корректирующей информации в устройство для передачи дифференциальных поправок, отличающийся тем, что передача и прием топопривязчиком дифференциальных поправок происходит следующим образом: топопривязчик выставляется на точке с известными координатами X, Y и высотой Н, запускаются программно-аппаратный комплекс и устройство приема и обработки информации базовой контрольно-корректирующей станции, включается и настраивается на необходимую частоту радиостанция, проводится настройка базовой контрольно-корректирующей станции, для чего последовательно на элементах опорной станции и станции интегрального контроля выбирается пункт меню «Инициализация», во вкладке «Координаты» в рабочем поле «Общее и координаты GPS» вводятся координаты текущего местоположения и нажимается кнопка «Пересчитать для ГЛОНАСС», а в поле «Используемые параметры пересчета координат» нажимается кнопка «Заполнить», после загрузки бортового компьютера программно-аппаратного комплекса в меню выбирается режим «Настройка АПД», где поля адреса аппаратуры передачи данных, адреса и подписи должны быть заполнены, в окне «Навигация» вводятся координаты и высота нахождения топопривязчика, далее необходимо перейти в окно «Связь» и контролировать информацию от базовой контрольно-корректирующей станции - количество поправок от спутниковых навигационных систем ГЛОНАСС и GPS, а выдача поправок потребителям происходит автоматически по их запросу, для потребителя необходимо ввести адрес запроса ХХХХХХ, где последние две цифры в поле адреса запроса соответствуют порядковому номеру топопривязчика, с которого происходит передача дифференциальных поправок, нажать кнопку «Запросить», проконтролировать в окне режима «Состояние», что аппаратура спутниковой навигации перешла в режим работы с коррекцией.
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ создания топогеодезических сетей для подготовки боевых действий ракетных войск, артиллерии и противовоздушной обороны сухопутных войск
Самодвижущаяся платформа робототехнического комплекса
Устройство для закрепления пустотелой детали
Способ информационно-технического сопряжения информационно-управляющего вычислителя с блоком управления двигателями мобильного робототехнического комплекса
Исполнительное устройство перемещения
Храповое устройство для стопорения вала
Система для определения и обеспечения показателей надёжности объекта военной техники
Имитатор воздушных целей
Система управления многофункционального робототехнического комплекса обеспечения боевых действий
Регулируемый спусковой механизм огнестрельного оружия
Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства
Способ контроля точностных характеристик системы топопривязки и навигации
Автоматизированное рабочее место для обучения расчета топопривязчика

